
1
Wykład 3
MECHANIKA TEORETYCZNA
Studia stacjonarne I stopnia – rok akademicki 2013/14
Autor:
Henryk Laskowski
Katedra Podstaw Mechaniki Ośrodków Ciągłych
Instytut Mechaniki Budowli
Wydział Inżynierii Lądowej
TEORIA RÓWNOWAŻNOŚCI UKŁADÓW SIŁ
Część 1
SIŁY I UKŁADY SIŁ
3
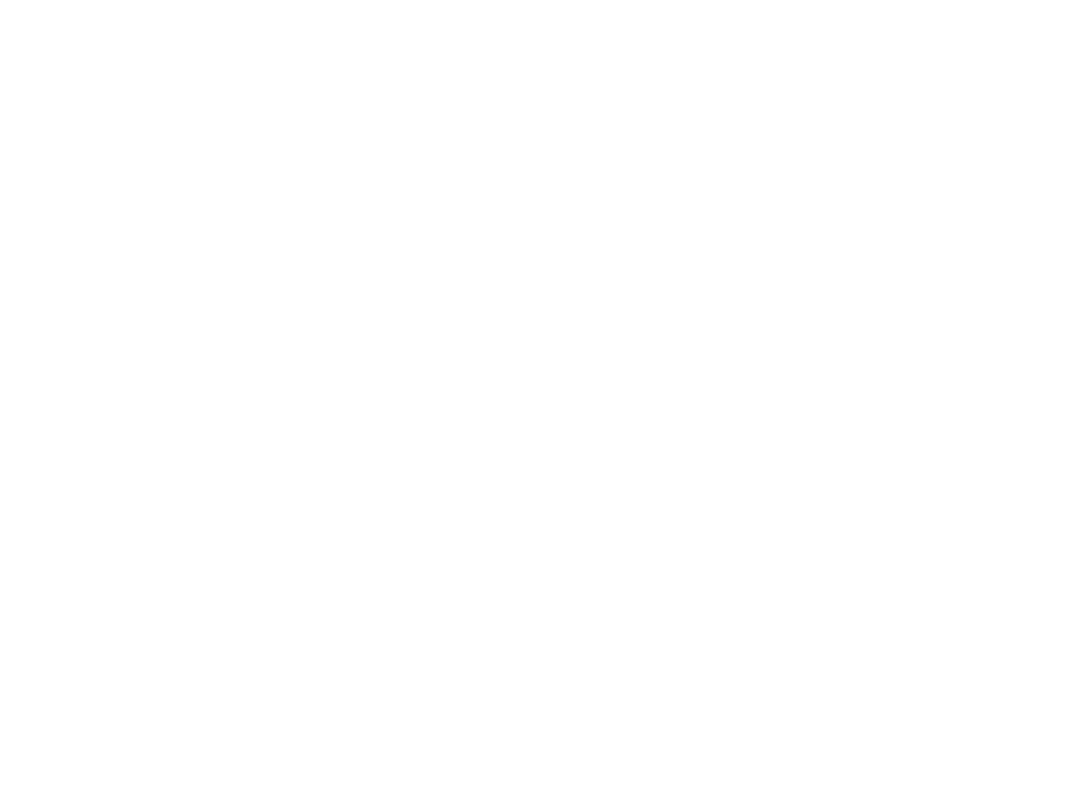
1.1. Moment siły względem punktu
Definicja
Momentem siły względem punktu
nazywamy wektor równy
iloczynowi
wektorowemu siły i wektora
wyznaczone-go przez punkt zaczepienia
siły i punkt, względem którego moment
jest liczony
ną
prawoskręt
trójkę
stanowią
:
zwrot
:
wartość
:
kierunek
B
B
B
B
df
B
M
AB
F
AB
F
M
AB
M
F
M
AB
F
M
,
,
α
sin
|
|
|
|
|
|
:
____
____
____
____
B
M
___
____
AB
r
F
B
A
α
.
B
M
___
F
B
4
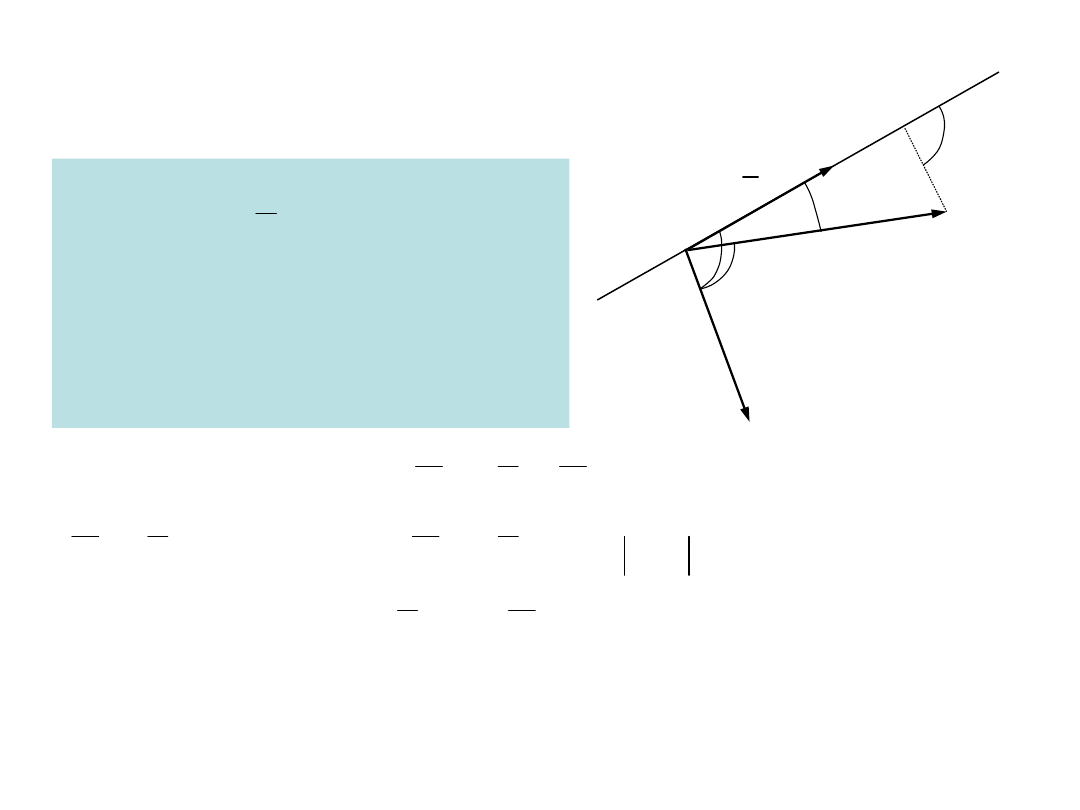
Przesunięcie siły wzdłuż jej kierunku działania
Przesunięcie siły wzdłuż jej kierunku działania nie
wpływa na zmianę wartości momentu siły względem
punktu
Ramię działania siły
Jest to wektor prostopadły do prostej
działania siły, którego początek leży na
tej prostej a koniec w punkcie,
względem którego liczony jest moment
siły
_______
____
____
____
____
const
BR
F
BR
AB
F
AR
F
M
R
)
(
R
M
___
____
AR
r
F
R
A
.
B
F
____
BR
'
R
____
R
M
F R' R
= �
R
M
___
____
AR
F
R
A
.
F
____
' R
R
'
R

5
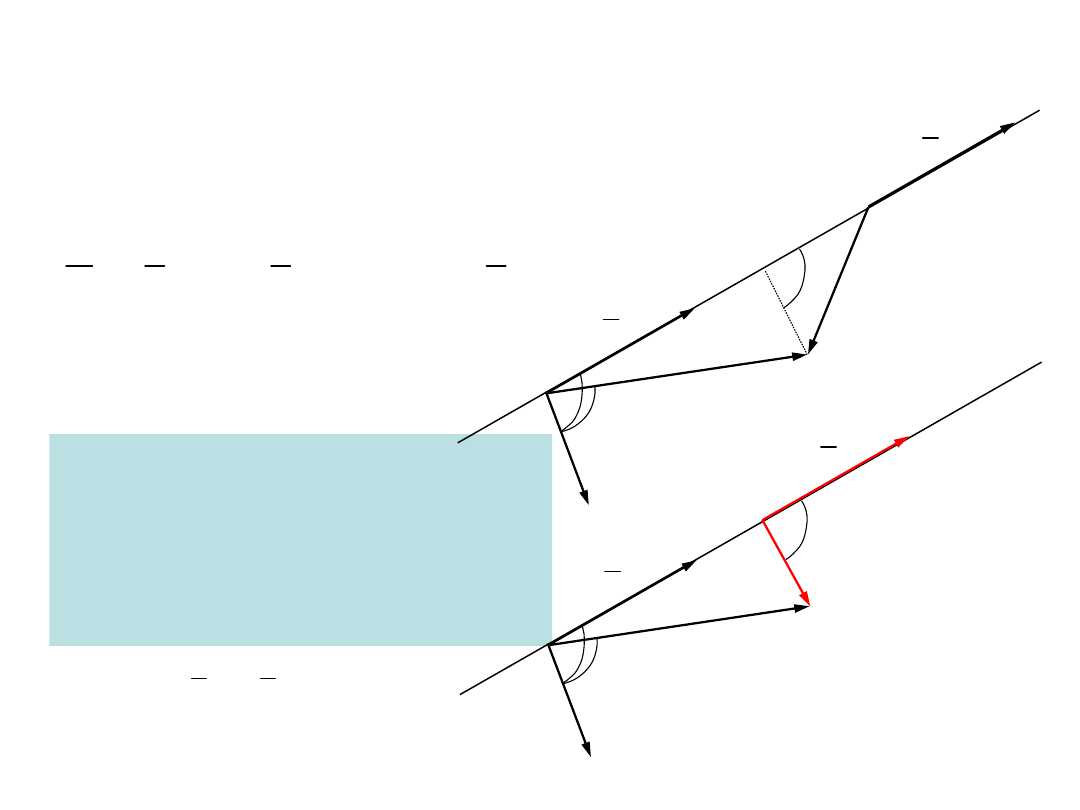
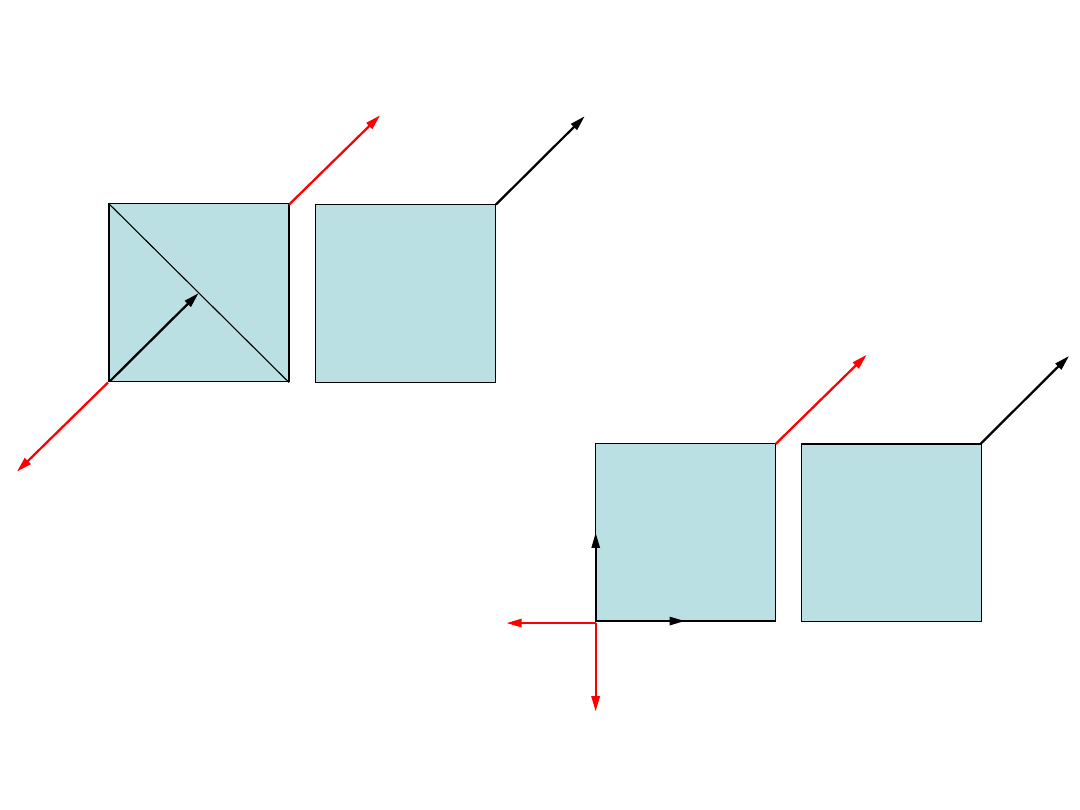
1.2. Moment siły względem prostej
Definicja
Momentem siły względem prostej
nazywamy iloczyn wektorowy rzutu
siły na płaszczyznę prostopadłą do
tej prostej względem punktu
przebicia płaszczyzny przez tę
prostą.
A
n
____
____
π
π
____
π
||
' :
|
| |
| | ' | sinα
,
' ,
l
df
l
l
l
kierunek: M l
M F A O wartość: M
F
A O
zwrot: F A O M stanowią trójkę prawoskrętną
�
�
�
= �
=
�
�
�
�
�
�
l
M
'
A
π
F
O
α
____
'O
A
F
l
e
6
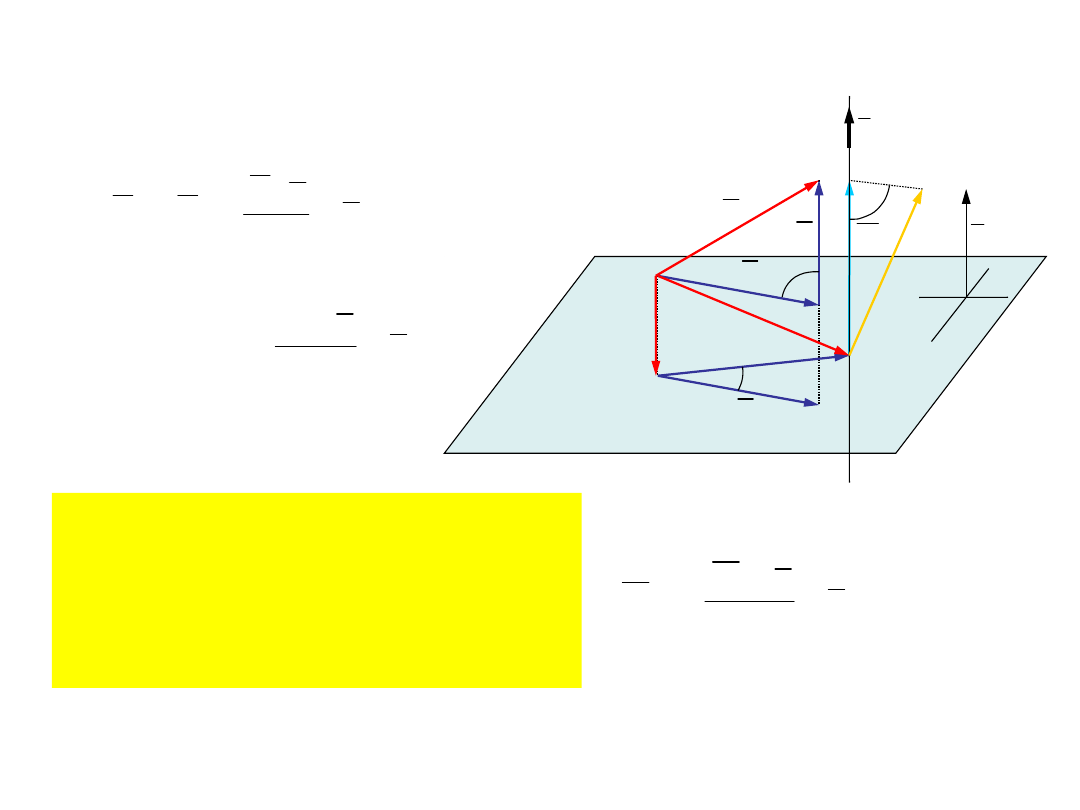
Twierdzenie
Moment siły względem prostej jest równy
rzutowi momentu siły względem
dowolnego punktu prostej na tę prostą.
Dowód pominięto
Twierdzenie o momencie siły względem prostej
l
M
n
α
____
'O
A
O
'
A
π
F
F
A
l
e
O
M
___
π
F
l
F
n
n
n
F
F
F
2
π
n
n
n
AO
AO
O
A
2
____
____
_____
'
n
n
n
M
M
O
l
2
7
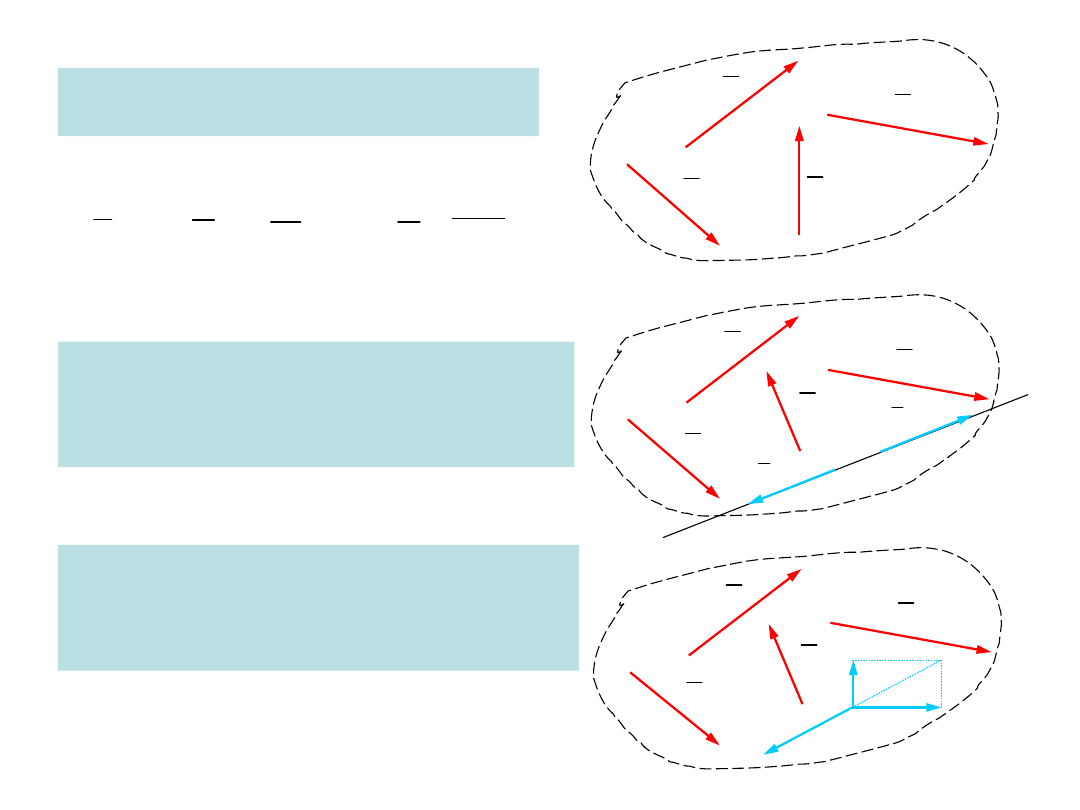
Układ sił
Zbiór sił wraz z punktami zaczepienia
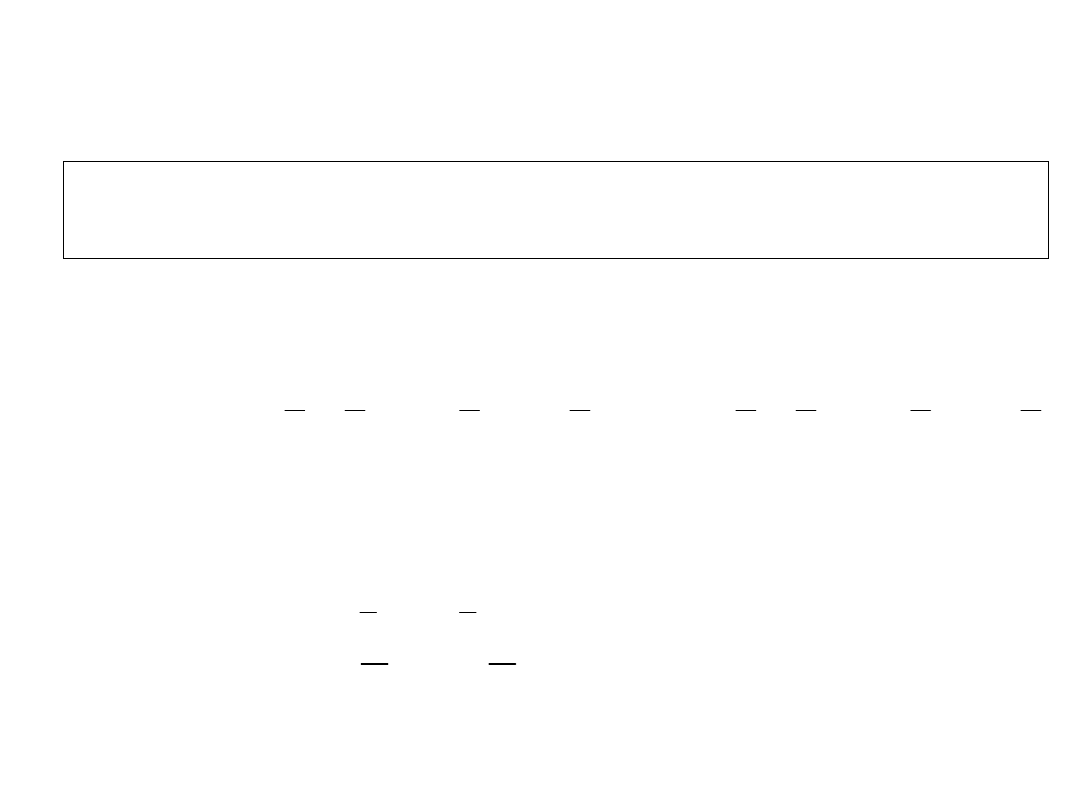
Przekształcenie elementarne I-go
rodzaju
Dodanie do układu lub odjęcie dwóch sił
przeciwnych działających wzdłuż prostej
Przekształcenie elementarne II-go
rodzaju
Dodanie do układu lub odjęcie układu sił
zbieżnych o sumie równej 0
Przekształcenia elementarne nie
zmieniają sumy i momentu układu
Suma
układu sił
Moment
układu sił
n
A
2
F
1
A
i
A
2
A
i
F
1
F
n
F
n
A
2
F
1
A
i
A
2
A
i
F
1
F
n
F
n
A
2
F
1
A
i
A
2
A
i
F
1
F
n
F
F
-
0
F
0
i
i
F
S
i
i
i
R
R
A
F
M
8
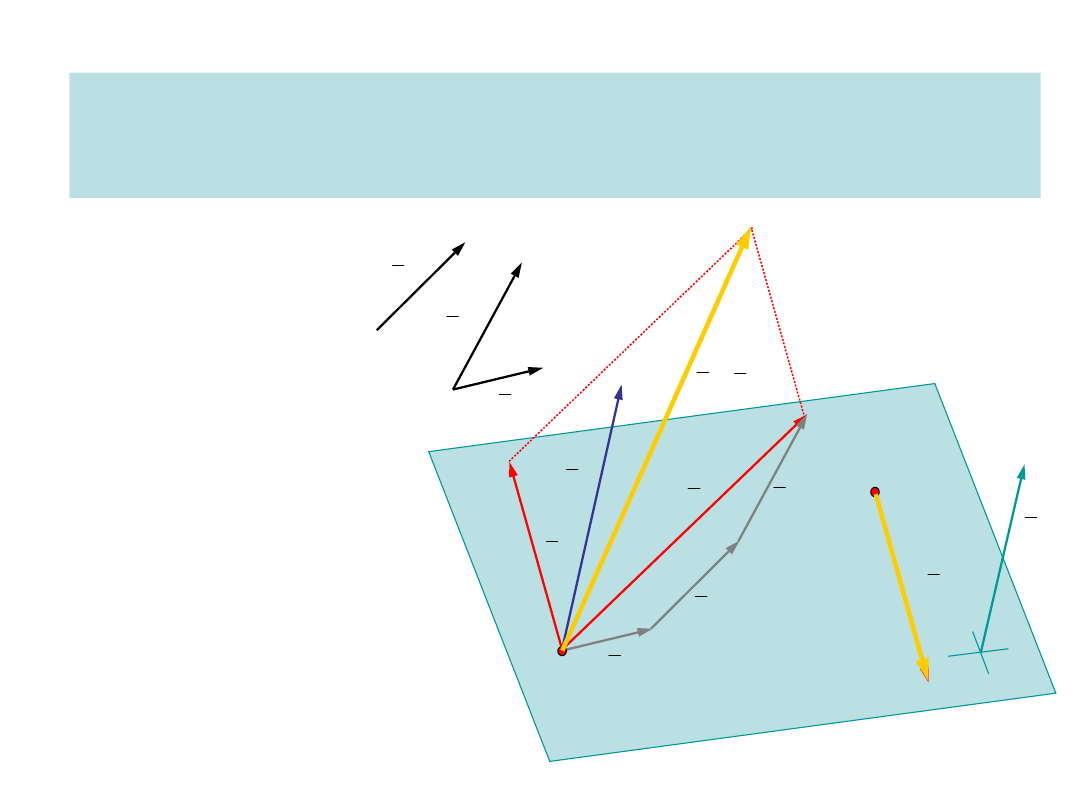
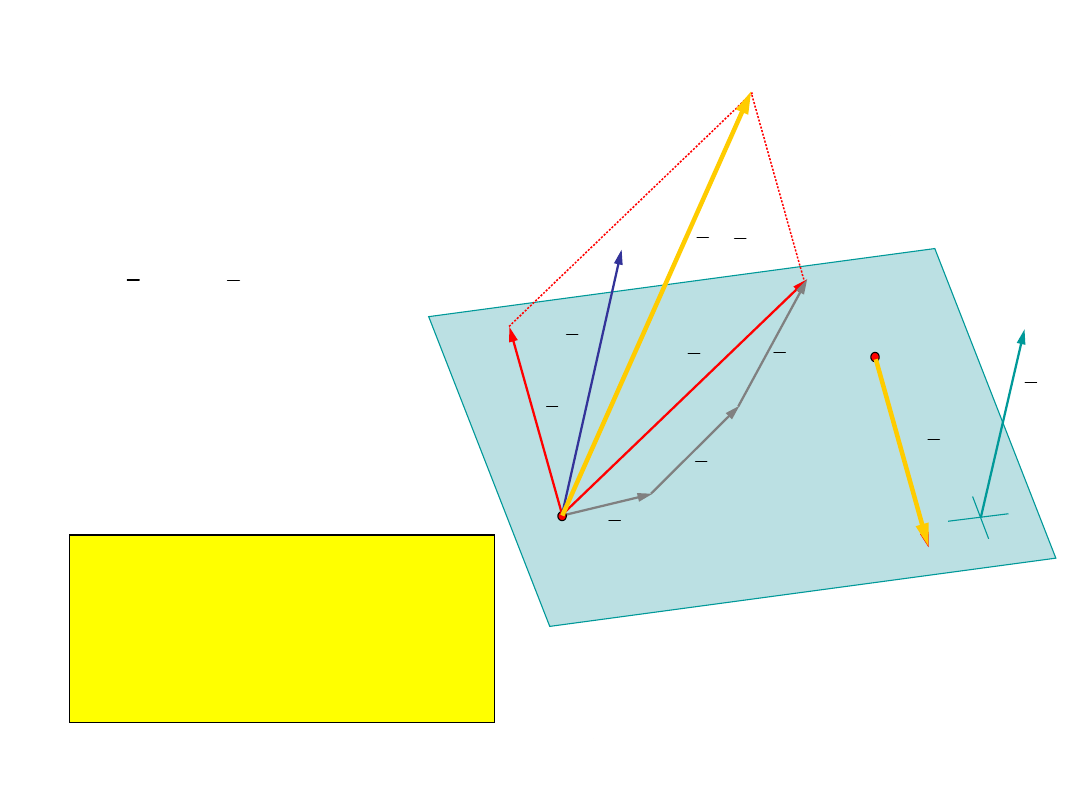
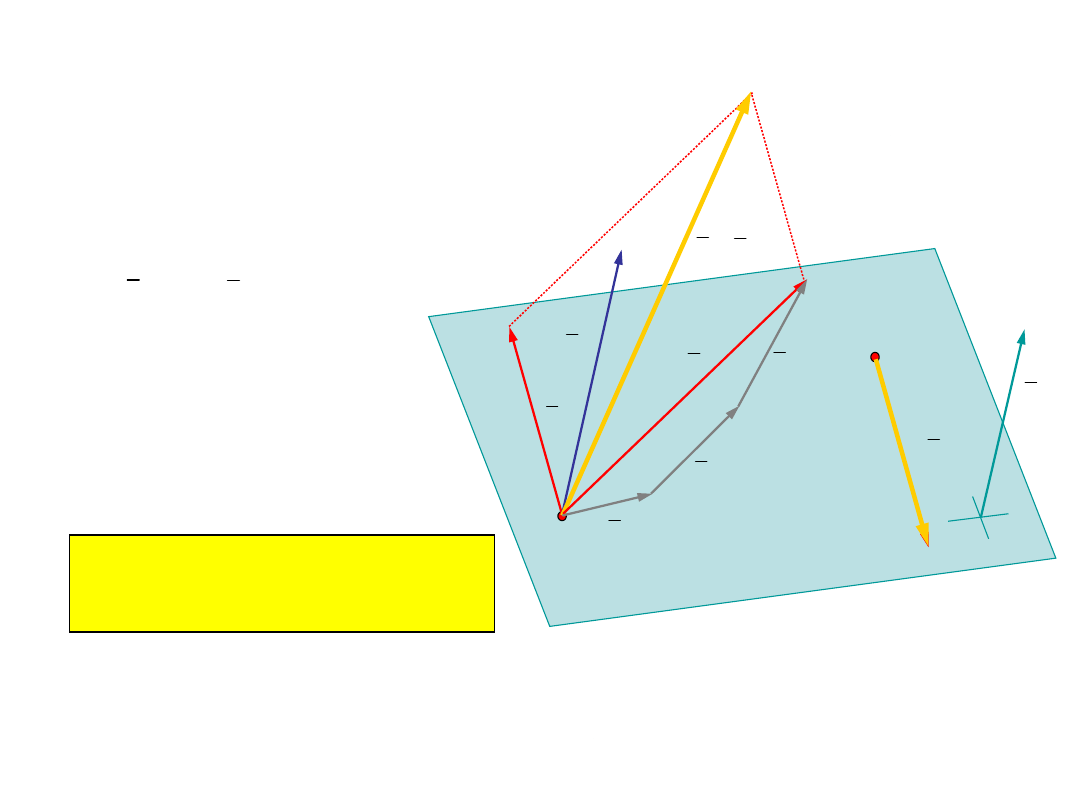
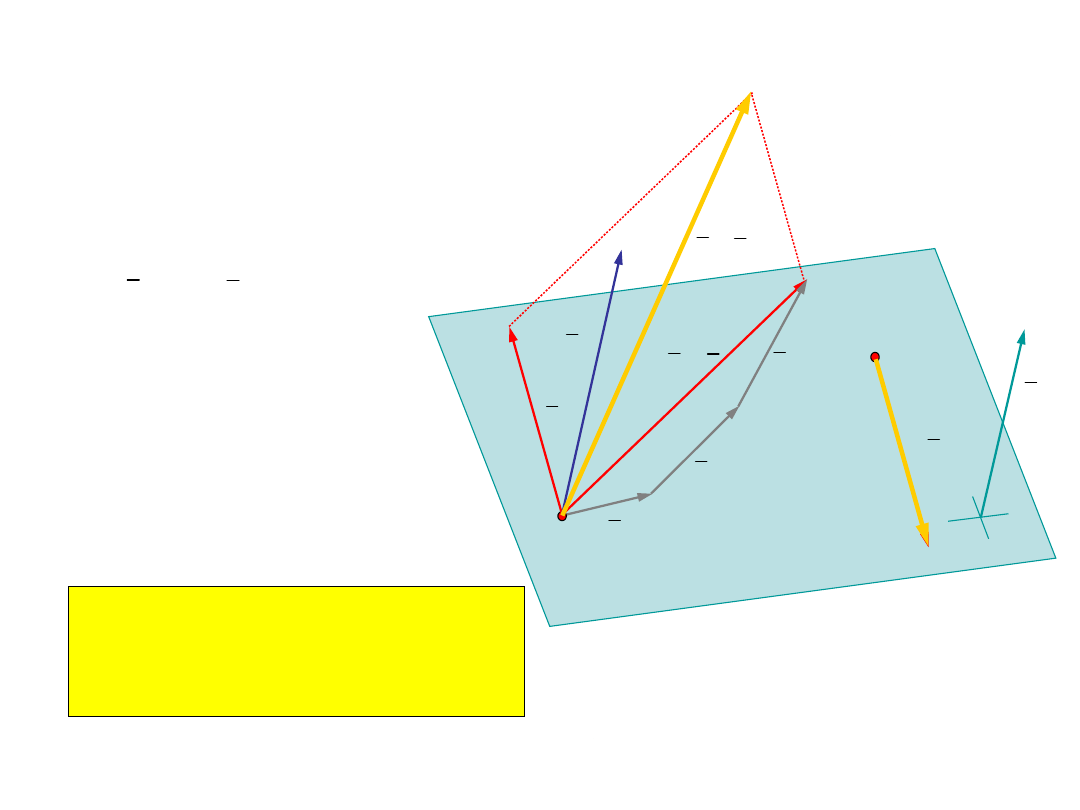
1.3. Twierdzenie o zmianie bieguna
Układ n sił
- punkt zaczepienia siły
- siła
- biegun redukcji
- nowy biegun redukcji
Twierdzenie
Moment układu sił względem nowego bieguna jest równy sumie momentu tego
układu względem starego bieguna i iloczynu wektorowego sumy układu i wektora
łączącego stary biegun z nowym.
____
____
____
____
BR
F
M
BR
B
A
F
R
A
F
M
n
i
i
B
n
i
i
i
n
i
i
i
R
1
1
1
)
(
i
A
n
A
2
F
1
A
i
A
2
A
B
R
i
F
1
F
n
F
B
R
i
F
n
i
i
df
F
S
1
____
BR
S
M
M
B
R
9
Wniosek 1
Jeżeli suma układu jest równa 0 to moment układu jest stały, tzn. nie
zależy od bieguna, względem którego jest liczony
Wnioski z twierdzenia o zmianie bieguna
Z: Suma układu jest równa 0
T: Moment układu jest
stały
D:
S =0
M const
=
____ S
B
A
B
A
M
M
S AB
M
M
=
=
+ �
�
=
0
10
Wniosek 2
Jeżeli momenty układu liczone względem trzech niewspółliniowych
punktów są równe to suma układu jest równa 0
Z: Punkty A, B, C są niewspółliniowe
oraz
T: Suma jest równa
0
D:
Wniosek 3
Iloczyn skalarny sumy i momentu liczonego
względem dowolnego punktu jest dla danego
układu sił wielkoś-cią stałą i nosi nazwę parametru
układu sił
D:
0
____
____
AC
AB
C
B
A
M
M
M
0
S
0
0
0
S
AC
S
AB
S
AC
S
M
M
AB
S
M
M
A
C
A
B
____
____
____
____
const
S
M
K
O
df
S
M
OA
S
S
S
M
S
OA
S
M
S
M
O
O
O
A
)
(
)
(
____
____
11
1.4. Równoważność układów sił
O równoważności układu wektorów (sił) można mówić wyłącznie w odniesieniu
do rozważanego problemu. W mechanice teoretycznej rozważa się
równoważność układów sił w odniesieniu do problemu redukcji.
Dwa układy
i
są równoważne, jeżeli można, wykonując na jednym z nich skończoną liczbę
przekształceń I-go i II-go rodzaju, przekształcić jeden układ w drugi.
Definicja równoważności układów sił
punkt
dowolny
)
(
)
(
)
(
)
(
O
O
O
M
M
S
S
df
B
A
B
A
B
A
:
n
i
n
i
A
A
A
A
F
F
F
F
...
...
...
...
2
1
2
1
A
m
i
m
i
B
B
B
B
R
R
R
R
...
...
...
...
2
1
2
1
B
12
Równoważne układy sił
Równoważne układy sił
Przekształcenie elementarne
I–go rodzaju
Przekształcenie elementarne
II–go rodzaju

13
Twierdzenia o równoważności układów sił
Twierdzenie 1
Dwa układy są równoważne, gdy mają równe sumy i równe momenty liczone
względem jednego (ustalonego) punktu.
Z:
oraz
T:
D:
Dowód
)
)
B
A
(
(
O
O
M
M
)
)
B
A
(
(
S
S
B
A
)
(
)
(
OO'
)
(
)
(
)
(
OO'
)
(
)
(
)
(
O'
O'
O
O'
O
O'
B
A
B
B
B
A
A
A
M
M
S
M
M
S
M
M
____
____

14
Twierdzenie 2
Dwa układy są równoważne, gdy mają (odpowiednio) równe momenty liczone
względem trzech niewspółliniowych punktów.
oraz
T:
D:
Dowód
Z: Punkty O, O’, O” są niewspółliniowe
czyli
)
)
B
A
(
(
O
O
M
M
)
)
B
A
(
(
S
S
B
A
____
____
____
____
OO"
)
(
)
(
)
(
OO"
)
(
)
(
)
(
OO'
)
(
)
(
)
(
OO'
)
(
)
(
)
(
O
O"
O
O"
O
O'
O
O'
B
B
B
A
A
A
B
B
B
A
A
A
S
M
M
S
M
M
S
M
M
S
M
M
)
)
B
A
(
(
O'
O'
M
M
)
)
B
A
(
(
O"
O"
M
M
0
)
(
-
)
(
OO"
do
równoległy
jest
nie
OO'
0
OO"
)
(
-
)
(
0
OO'
)
(
-
)
(
B
A
B
A
B
A
S
S
S
S
S
S
____
____
____
____
15
1.5. Zerowy układ sił i para sił
Zerowy układ sił
Układ sił, którego suma i moment
liczony względem dowolnego punktu
jest wektorem zerowym.
Para sił
Układ dwóch niezerowych sił przeciw-
nych nie leżących na jednej prostej.
0
0
M
S
F
F
F
G
)
(
G
F
ne
prawoskręt
:
zwrot
:
wartość
:
kierunek
O
O
O
B
O
M
AB
F
d
F
AB
F
M
M
AB
F
M
M
,
,
|
|
α
sin
|
|
|
|
|
|
Π
:
____
____
____
F
A
B
F
O
M
0
d
Π
α

Część 2
REDUKCJA UKŁADU SIŁ
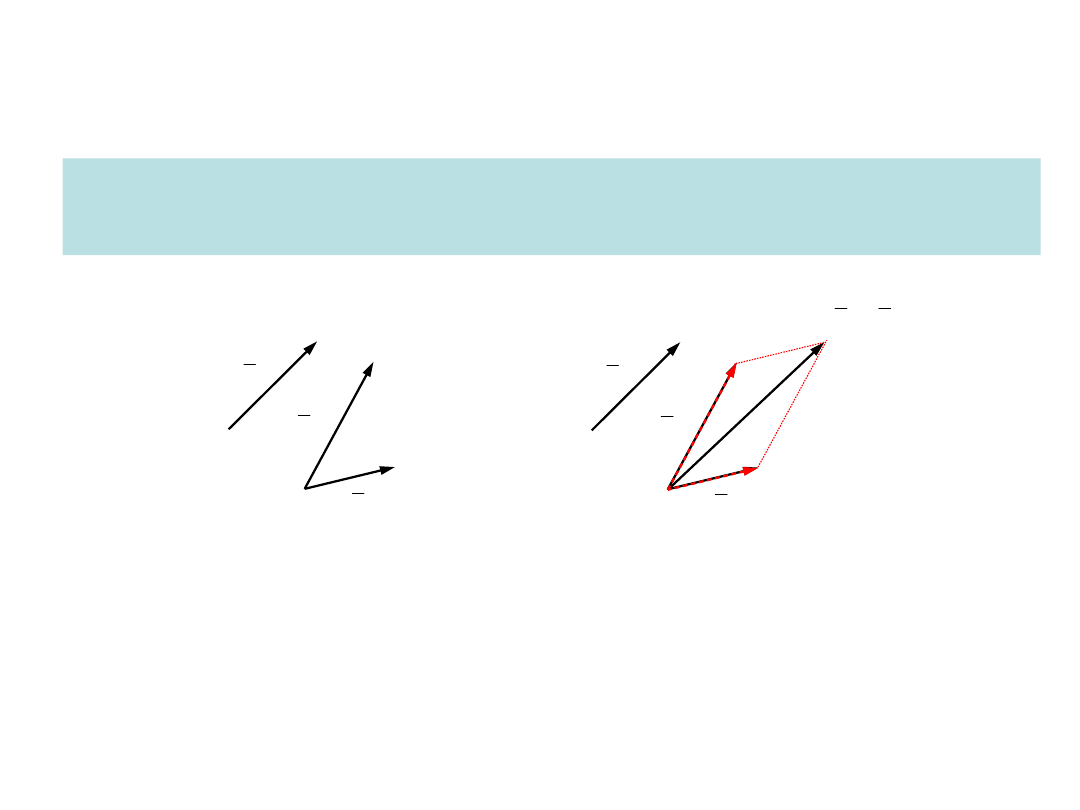
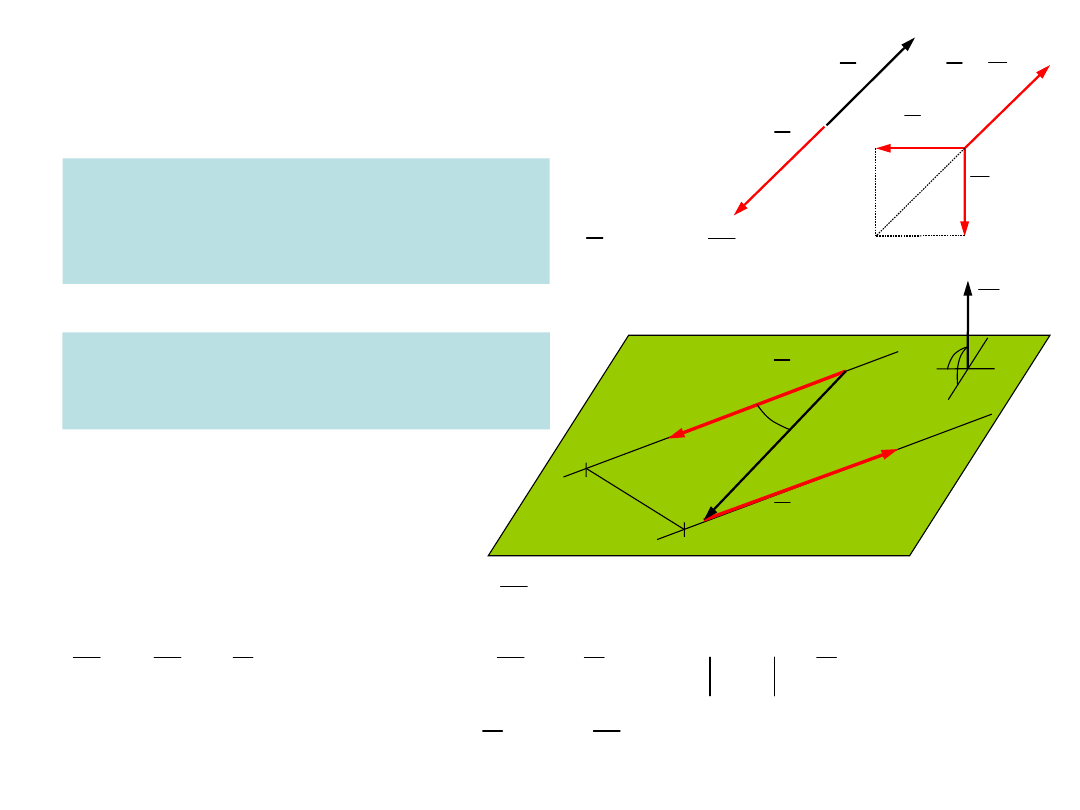
17
2.1. Redukcja układu sił w punkcie
Redukcja układ sił
Przekształcenie polegające na zastąpieniu danego układu sił równoważnym
układem prostszym, tj. złożonym z mniejszej liczby sił
Układ trzech sił
Układ równoważny,
zredukowany do dwóch sił
F
1
F
2
F
3
F
1
F
F
+
2
3
F
2
F
3
F
2
F
3
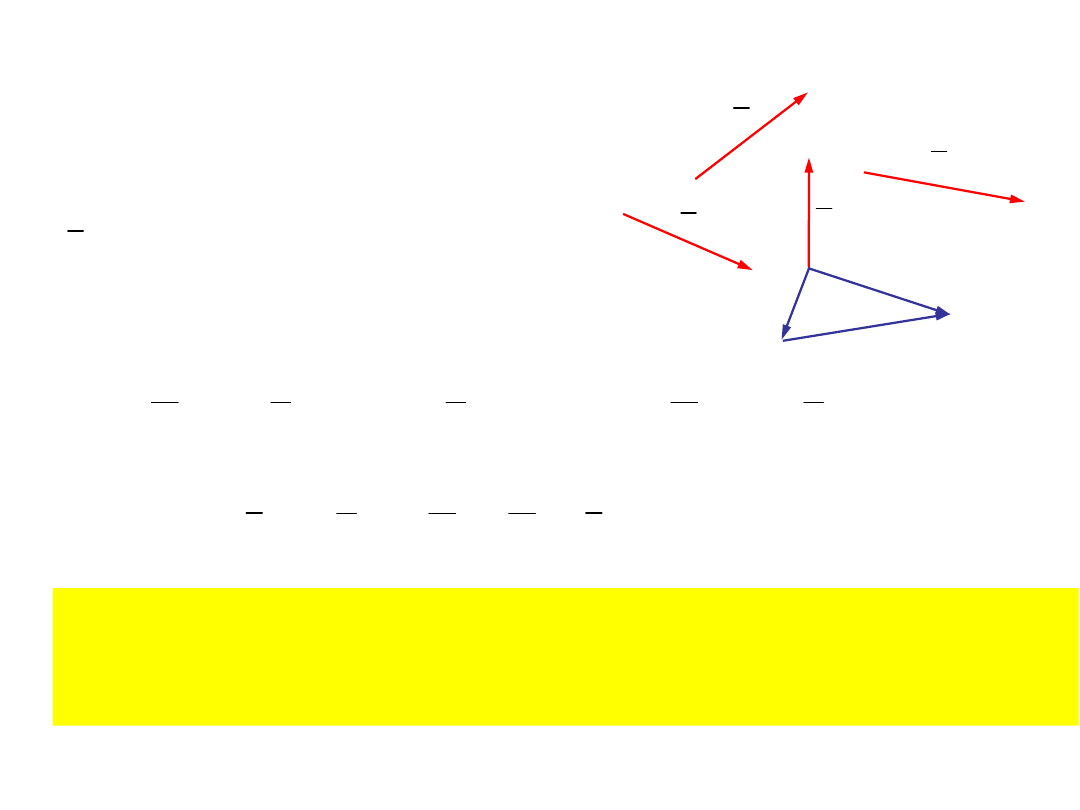
18
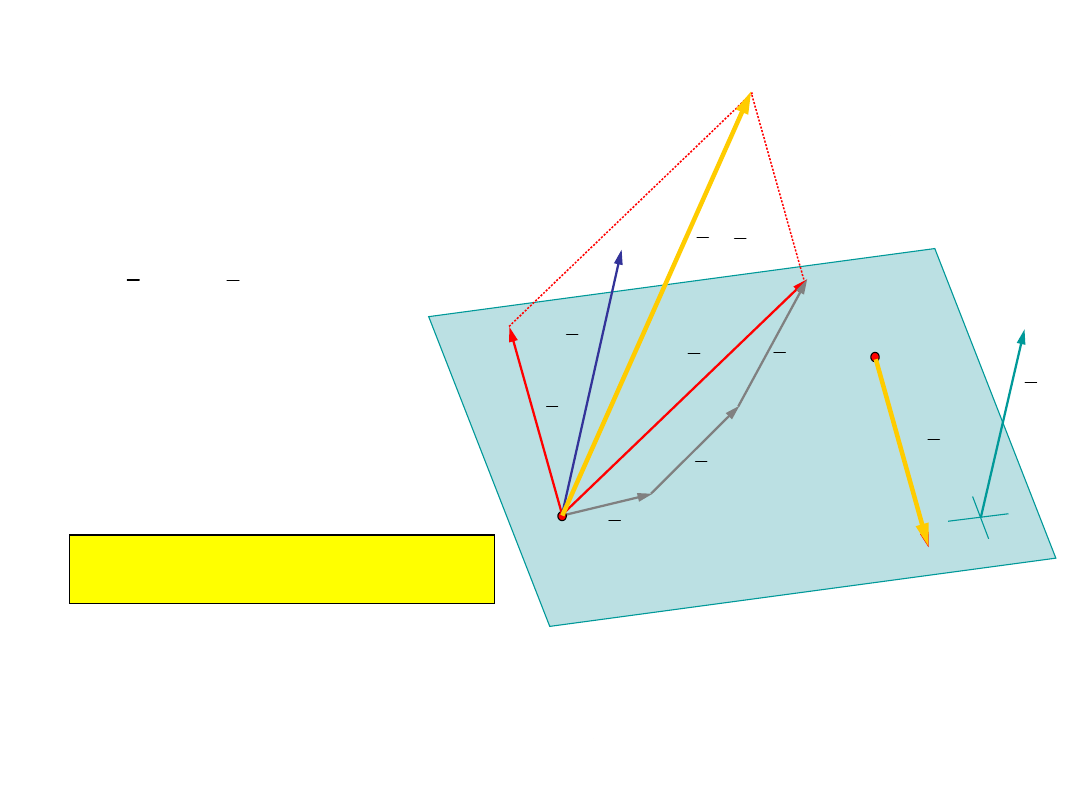
Redukcja w punkcie (w biegunie redukcji)
Zastąpienie danego układu układem równoważnym, złożonym z wektora
równego sumie układu i pary sił o momencie równym momentowi układu sił
względem bieguna redukcji
Tok
postępowania:
1. Wybór bieguna redukcji O
2. Wyznaczenie
wektora
zaczepionego w punkcie O
równego sumie układu
3. Wyznaczenie
momentu
układu sił względem bieguna
O
4. Wyznaczenie
pary sił o momencie
równym momentowi układu
względem bieguna redukcji, z
których jedna jest zaczepiona w
biegunie redukcji
5. Redukcja układu do dwóch sił
skośnych poprzez dodanie sił
zaczepionych w O
n
π
F
1
F
2
F
3
S
F
3
F
1
F
2
O
F
F
-
G
O
M
S F
+
19
Cztery przypadki redukcji w punkcie
Przypadek 1 (ogólny):
Układ sił redukuje się do wektora
b = S zaczepionego w punkcie
redukcji oraz pary sił o
momencie M
O
równym
momentowi układu sił względem
punktu redukcji
n
π
S
F
3
F
1
F
2
O
F
F
-
G
O
M
S F
+
S
M
�ǹ
0
0
20
Cztery przypadki redukcji w punkcie - cd
Przypadek 2:
Układ sił redukuje się do wektora
b = S zaczepionego w punkcie
redukcji
S
M
� �
=
0
0
n
π
O
F
F
-
G
O
M
S F
+
S
F
3
F
1
F
2
21
Cztery przypadki redukcji w punkcie - cd
Przypadek 3:
Układ sił redukuje się do pary sił
o momencie M
O
równym
momentowi układu sił względem
punktu redukcji
S
M
= ǹ
0
0
n
π
b S
=
F
3
F
1
F
2
O
F
F
-
G
O
M
S F
+
22
Cztery przypadki redukcji w punkcie - cd
Przypadek 4:
Układ sił redukuje się do układu
zerowego
S
M
= �
=
0
0
n
π
S
F
3
F
1
F
2
O
F
F
-
G
O
M
S F
+
23
2.2. Redukcja układu sił do najprostszej
postaci
Redukcja układ sił do najprostszej postaci
Przekształcenie polegające na zastąpieniu danego układu sił układem
równoważnym złożonym z najmniejszej liczby sił
Redukcja w punkcie a redukcja do najprostszej postaci
W problemie redukcji w punkcie biegun redukcji jest znany (wybrany lub
zadany) natomiast w problemie redukcji do najprostszej postaci poszukuje się
położenia takich punktów, w których układ sił redukuje się do najprostszej
postaci
24
Przypadek 1:
Jeżeli w wybranym lub zadanym biegunie redukcji układ sił redukuje się do układu
zerowego to układ zerowy jest najprostszym zredukowanym układem tego układu
sił
Układ sił w każdym punkcie
redukuje się do
układu
zerowego
Szczególne przypadki redukcji do najprostszej postaci
Przypadek 2:
Jeżeli w wybranym lub zadanym biegunie redukcji układ sił redukuje się do pary sił
o momencie równym momentowi układu sił względem bieguna redukcji to
para sił jest najprostszym zredukowanym układem tego układu sił
Układ sił w każdym punkcie
redukuje się do
pary sił
O
S
M
O
= �
=
-
0
0
wybrany punkt
O
S
M
O
= ǹ
-
0
0
wybrany punkt

25
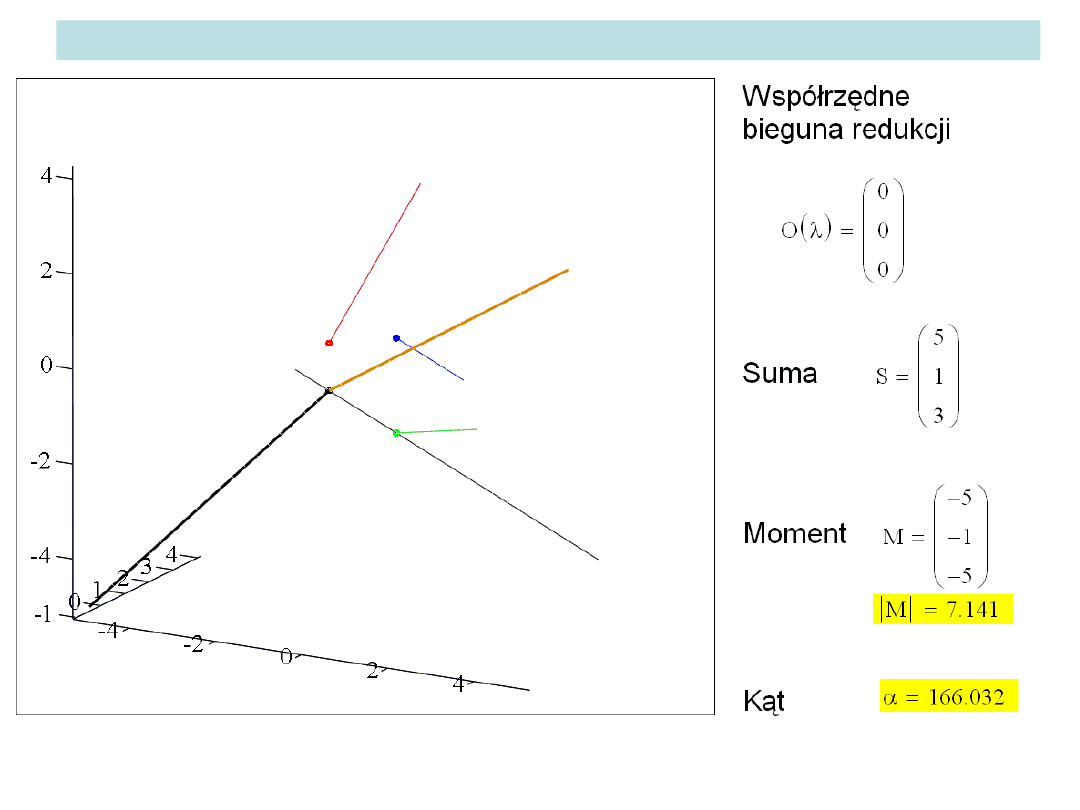
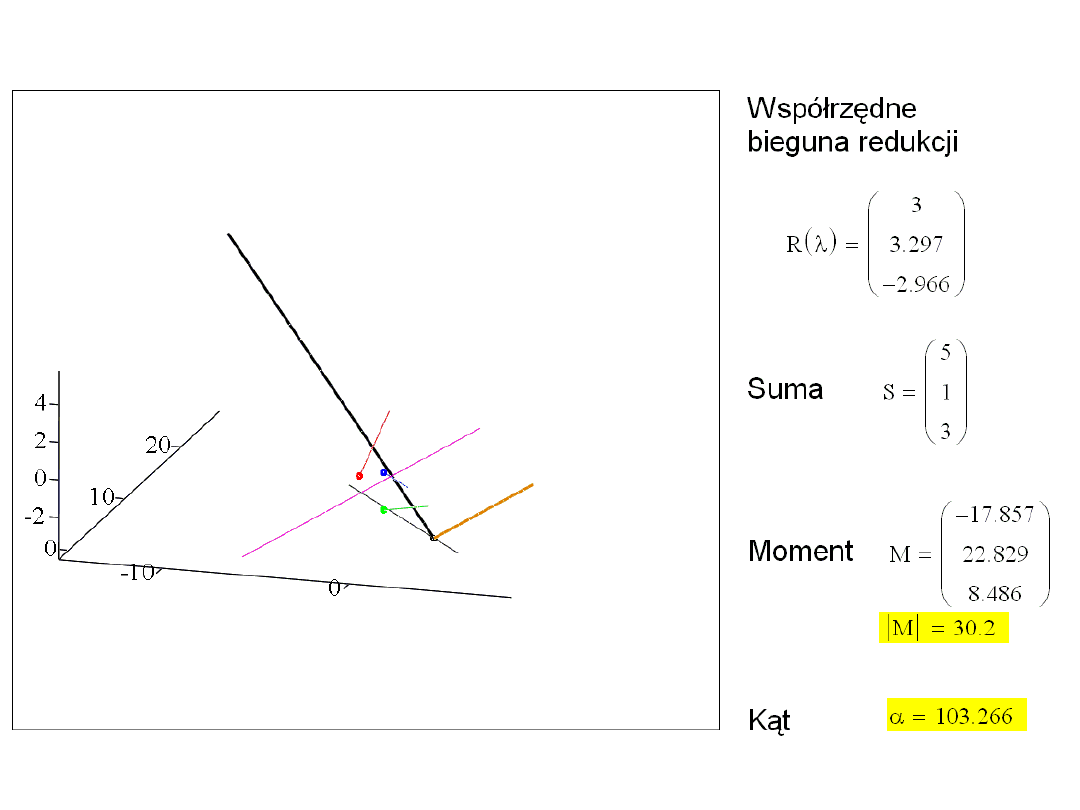
Przypadek ogólny: parametr układu jest różny od 0 – przykład:
Dany jest układ trzech sił:
Suma układu:
Moment układu
względem punktu
(0, 0, 0):
Parametr układu:
Zadanie:
Jak zmienia się równoważny układ zredukowany w biegunie redukcji
poruszającym się wzdłuż wybranej prostej.
Równanie parametryczne
przypadkowo wybranej prostej:
(
)
(
)
(
)
(
)
(
)
(
)
a
b
c
A
B
C
�
�
=
=
-
=
-
�
�
�
�
-
�
�
1 2 3
1 1
1
3
2 1
0 0 1
1 1 1
1 1
1
(
) (
) (
) (
)
S =
+
- +
-
=
1 2 3
1 1
1
3
2 1
5 1 3
(
)
(
)
(
)
(
)
(
)
(
) (
)
O
M
-
-
=
+
+
= -
-
-
-
-
-
-
-
-
�
�
�
1 2 3
1 1
1
3
2 1
5
1
5
0 0
1
1
1
1
1
1 1
(
) (
)
O
K S M
= � =
-
-
-
=-
5 1 3
5
1
5
41
o
xλ , y λ , z
λ
=
=
=-
26
Rozwiązanie zadania przy l zmieniającym się w sposób ciągły od 0 do 3
27
Przypadek ogólny: parametr układu jest różny od 0 – rozważania teoretyczne
Punkty, w których układ sił o parametrze K różnym od 0 redukuje się do sumy i
pary sił o momencie równoległym do sumy leżą na prostej zwanej
osią
środkową
Układ sił w punktach osi środkowej redukuje się do
skrętnika
(
)
O
O
O
K S M
S M cos
S,M
const
=
= �
�
=
o
S
(
)
O
O
K
M
S cos
S,M
=
� S
(
)
O
O
M
min
S,M
π
�
ۮ�
�
�
0
S
(
)
O
O
O
O
S
M
M
S
S,M
K
M
S
�
=
�
�
�
=
�
�
=
�
�
0
S
:
O
K
M
S
S
=
�
2
(
)
O
O
O
O
S
M
M
S
S,Mπ
K
M
S
�
=-
�
�
�
=
�
�
=-
�
�
S
:
O
K
M
S
S
=
�
2

28
Przypadek ogólny: parametr układu jest różny od 0 – przykład:
Zadanie:
Wyznaczyć oś środkową układu sił z poprzedniego przykładu a następnie
zilustrować zmiany równoważnego układu zredukowanego gdy punkt redukcji
porusza się po prostej przecinającej się z osią środkową
W osi środkowej układ redukuje się do sumy i pary sił o
momencie równoległym do sumy i osiąga minimalną wartość
(skrętnik):
Przyrównując odpowiednie współrzędne wyznacza się równanie krawędziowe
lub parametryczne osi środkowej
Wykorzystując twierdzenie o zmianie bieguna formułuje się wektorowe
równanie osi środkowej:
- punkt leżący na osi środkowej
R
K
M
S
S
=
�
2
(
)
(
)
z
y
d
, gdzie d
x
z
d
� -
-
+ =
�
=
�
-
-
+ =
�
�
3
5 1
0
41
3
5
1
0
35
(
)
(
)
xλ
yλ
d
zλ
d
�
�
=
�
� = -
+
�
�
�
=
-
+
�
�
1
26
1
5
15
3
1
1
5
5
(
)
R
O
K
M
S M
S OR , R x,y,z
S
=
� =
+ �
2
29
30
Przypadek 3:
Suma układu jest różna od zera a parametr jest równy 0
Trzeci szczególny przypadek redukcji do najprostszej postaci
Definicja wypadkowej:
Wypadkowa to układ sił równoważny danemu złożony z jednego wektora
Układ sił w każdym punkcie osi środkowej
redukuje się do jednego wektora
-
wypadkowej
(moment układu jest zawsze prostopadły do
sumy)
Wypadkowa działa wzdłuż ściśle określonej prostej (prosta działania
wypadkowej, oś środkowa) o tej własności, że moment układu względem
punktów tej prostej jest równy 0
O
K
M
S
S
=
� =
2
0
S
K
� � =
0
0
Document Outline
- Wykład 3
- Slide 2
- 1.1. Moment siły względem punktu
- Slide 4
- 1.2. Moment siły względem prostej
- Slide 6
- Slide 7
- 1.3. Twierdzenie o zmianie bieguna
- Slide 9
- Slide 10
- 1.4. Równoważność układów sił
- Slide 12
- Slide 13
- Slide 14
- 1.5. Zerowy układ sił i para sił
- Slide 16
- 2.1. Redukcja układu sił w punkcie
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- 2.2. Redukcja układu sił do najprostszej postaci
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
Wyszukiwarka
Podobne podstrony:
MT st w 03
MT st w 03
MT st w 03 [tryb zgodno┼Ťci]
MT st w 06
MT st w 02a
MT st w 06 [tryb zgodności]
MT st w 08 [tryb zgodności]
MT st w 02a 2
MT st w 10
MT st w 13
MT st w 04 cz1 [tryb zgodności]
MT st w 05 [tryb zgodności]
MT st w 15
MT st w 04 cz2 [tryb zgodności]
MT st w 14
więcej podobnych podstron