
PROJEKTOWANIE
DYSKRETNYCH UKŁADÓW
MECHANICZNYCH - SYNTEZA
Szymon Kraut
Informacje na temat:
•
stanów rezonansowych maszyn i
urządzeń
•
tłumienia
•
metod wyznaczania charakterystyki
dynamicznej oraz dalszej
syntezy
układów
dyskretnych
21-12-27
2
Wstęp teoretyczny

Ważne pojęcia
Synteza
– zadanie poszukiwania parametrów
oraz struktury układów, spełniających zadane
własności dynamiczne w postaci widma
częstości.
21-12-27
3

Stany rezonansowe maszyn i urządzeń
Stany rezonansowe są to częstotliwości w
których w urządzeniu powstają
największe drgania. Ze względu na ich
szkodliwe działanie, pożądany jest taki
dobór częstotliwości drgań własnych, aby
były one poza zakresem częstotliwości
drgań generowanych przez urządzenie
podczas prawidłowej pracy. Istnieją także
przypadki, w których stany rezonansowe
działają pozytywnie.
21-12-27
4

Tłumienie a stany rezonansowe
Tłumienie obniża amplitudę drgań,
co pozwala maszynie na wyjście ze
stanu rezonansu. W maszynie
pojawia się wiele częstotliwości
drgań własnych.
21-12-27
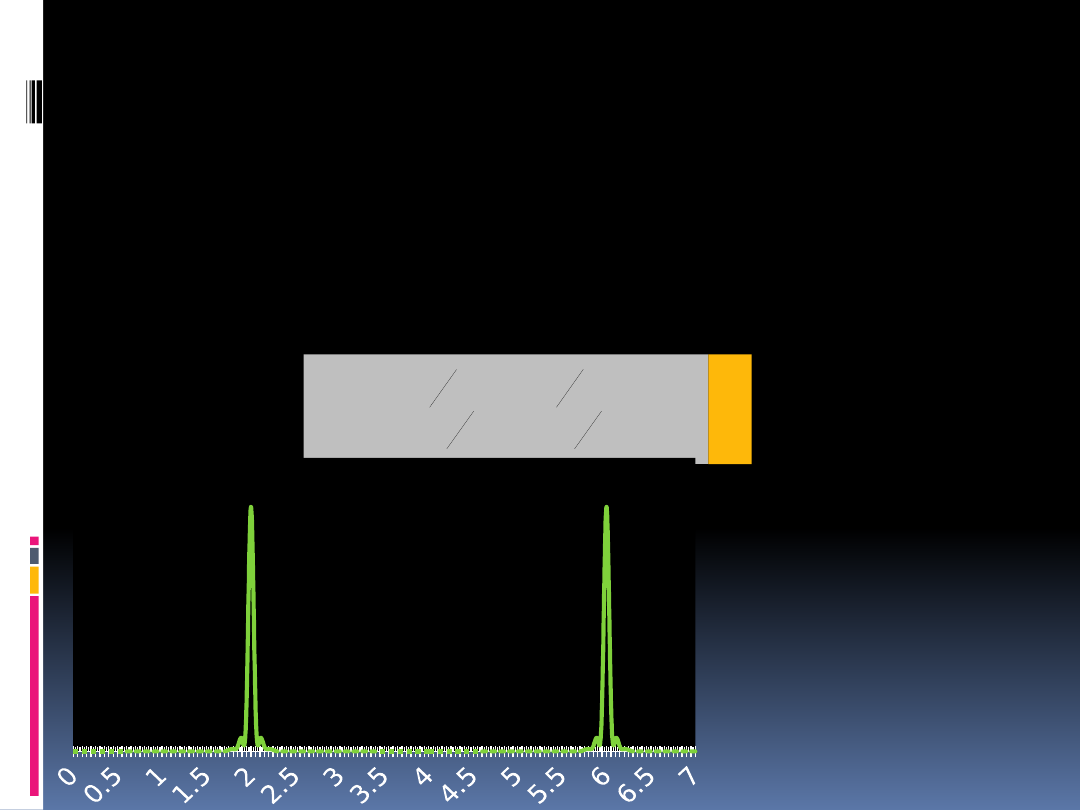
5
Hz

Problem syntezy układów
Aby dokonać syntezy układu
mechatronicznego, należy najpierw
wyznaczyć
charakterystykę
dynamiczną
.
21-12-27
6

3 kroki wyznaczania charakterystyki dynamicznej
1.
Przyjąć rodzaj syntezowanej funkcji,
czyli określić czy dana funkcja
będzie ruchliwością V(s), czy też
powolnością U(s).
2.
Przyjąć wymagania odnośnie
tłumienia (jeśli układ ma mieć
tłumienie).
3.
Wyznaczyć charakterystykę
dynamiczną V(s) [U(s)] w postaci
funkcji wymiernej z dokładnością do
stałej H.
21-12-27
7

Synteza charakterystyki
Istnieje wiele możliwości syntezy
charakterystyki zgodnie z
założeniami. Liczba możliwych
struktur zależy od częstości
rezonansowych i nałożonych na
układ utwierdzeń.
21-12-27
8
Synteza powolności układów
przytwierdzonych.
21-12-27
9
Przykład rozwiązania zadania
Wymagania
Wymagania, jakie spełnić ma układ
podane są w postaci ciągu częstości
rezonansowych i
antyrezonansowych:
21-12-27
10
zera
s
rad
s
rad
bieguny
s
rad
s
rad
4
,
0
6
,
2
2
0
3
1
1
rad/s

Założenia
1.
Poszukiwana funkcja
charakterystyczna jest powolnością
U(s).
2.
Przyjmuje się wymagania odnośnie
tłumienia:
tłumienie proporcjonalne do elementu
inercyjnego
tłumienie proporcjonalne do elementu
sprężystego
21-12-27
11
Tworzenie charakterystyki
Kolejnym krokiem jest utworzenie
charakterystyki w takiej postaci, aby
dało się ją poddać syntezie jedną ze
znanych metod
21-12-27
12
s
s
s
s
s
s
s
s
s
U
16
144
40
3
2
4
2
2
2
2
3
2
2
1
2
2

Wstęp do właściwej syntezy
Sprecyzowane wcześniej wymagania
w postaci charakterystyk
dynamicznych (
12.2
) poddaje się
syntezie jedną z metod:
rozkładu na ułamek łańcuchowy
rozkładu na ułamki proste
metodą mieszaną
wykorzystując algorytm wyznaczania
elementu sprężystego
21-12-27
13
W następnym kroku otrzymaną wcześniej funkcję
charakterystyczną (
12.2
) poddaje się rozkładowi
na ułamek łańcuchowy
21-12-27
14
3
s
s
s
s
s
s
s
s
s
U
16
144
24
16
144
40
3
2
3
2
4
m
1
W następnym kroku otrzymaną wcześniej funkcję
charakterystyczną (
12.2
) poddaje się rozkładowi
na ułamek łańcuchowy
21-12-27
15
3
144
24
10
24
1
1
144
24
16
1
16
144
24
16
144
40
2
2
3
3
2
3
2
4
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
U
m
1
c
1
W następnym kroku otrzymaną wcześniej funkcję
charakterystyczną (
12.2
) poddaje się rozkładowi
na ułamek łańcuchowy
21-12-27
16
3
144
24
10
24
1
1
144
24
16
1
16
144
24
16
144
40
2
2
3
3
2
3
2
4
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
U
s
s
s
s
s
s
s
s
5
7
5
12
1
24
1
1
10
144
24
1
24
1
1
2
m
1
m
2
c
1
W następnym kroku otrzymaną wcześniej funkcję
charakterystyczną (
12.2
) poddaje się rozkładowi
na ułamek łańcuchowy
21-12-27
17
3
144
24
10
24
1
1
144
24
16
1
16
144
24
16
144
40
2
2
3
3
2
3
2
4
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
U
s
s
s
s
s
s
s
s
s
s
s
s
7
5
1
5
12
1
24
1
1
5
7
5
12
1
24
1
1
10
144
24
1
24
1
1
2
m
1
m
2
c
1
c
2
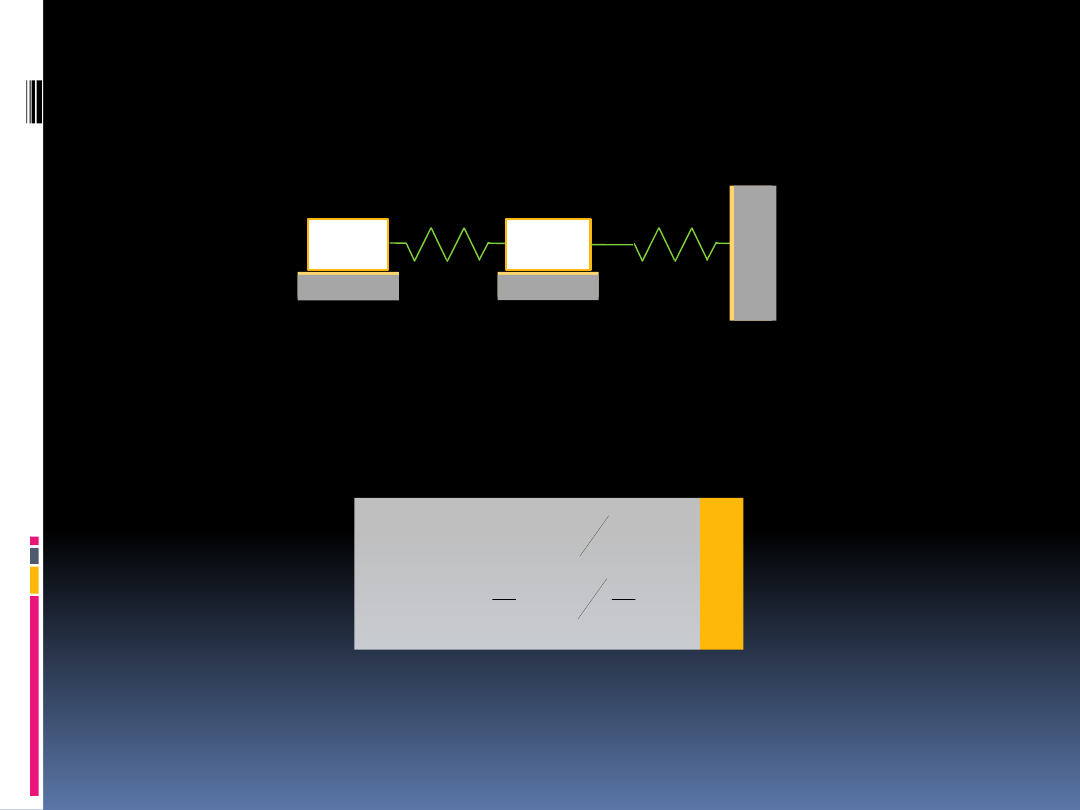
Otrzymany układ dyskretny
21-12-27
18
Wartości liczbowe:
m
1
m
2
c
1
c
2
m
N
5
7
,
m
N
24
kg
5
12
,
kg
1
2
1
2
1
c
c
m
m
4
Sprawdzenie wyniku
21-12-27
19
Wynik można sprawdzić np. za
pomocą równań różniczkowych ruchu
układu
0
m
0
m
2
2
1
2
1
2
2
2
1
1
1
1
x
c
x
x
c
x
x
x
c
x
5
0
m
0
m
2
2
1
1
2
1
2
2
2
1
1
1
1
1
x
c
x
c
x
c
x
x
c
x
c
x
6
0
m
-
0
m
-
2
2
1
1
2
1
2
2
2
2
1
1
1
2
1
1
A
c
A
c
A
c
A
A
c
A
c
A
7
21-12-27
20
0
0
2
1
2
2
2
1
1
1
2
1
1
A
A
m
c
c
c
c
m
c
9
1
0
1
1
0
m
-
A
0
m
-
A
2
2
2
1
2
1
1
1
2
2
1
1
1
c
c
c
A
c
A
c
8
0
2
2
2
1
1
1
2
1
1
2
m
c
c
c
c
m
c
0
2
1
2
2
2
1
2
1
1
c
m
c
c
m
c
21-12-27
21
Szukając miejsc zerowych
otrzymanego wyrażenia otrzymuje
się:
0
2
1
2
1
2
1
1
2
1
4
2
1
c
c
m
c
m
c
m
c
m
m
1
2
996920865
,
35
0058328368
,
4
2
2
2
1
1
3
9997
,
5
0015
,
2
2
1
1
4
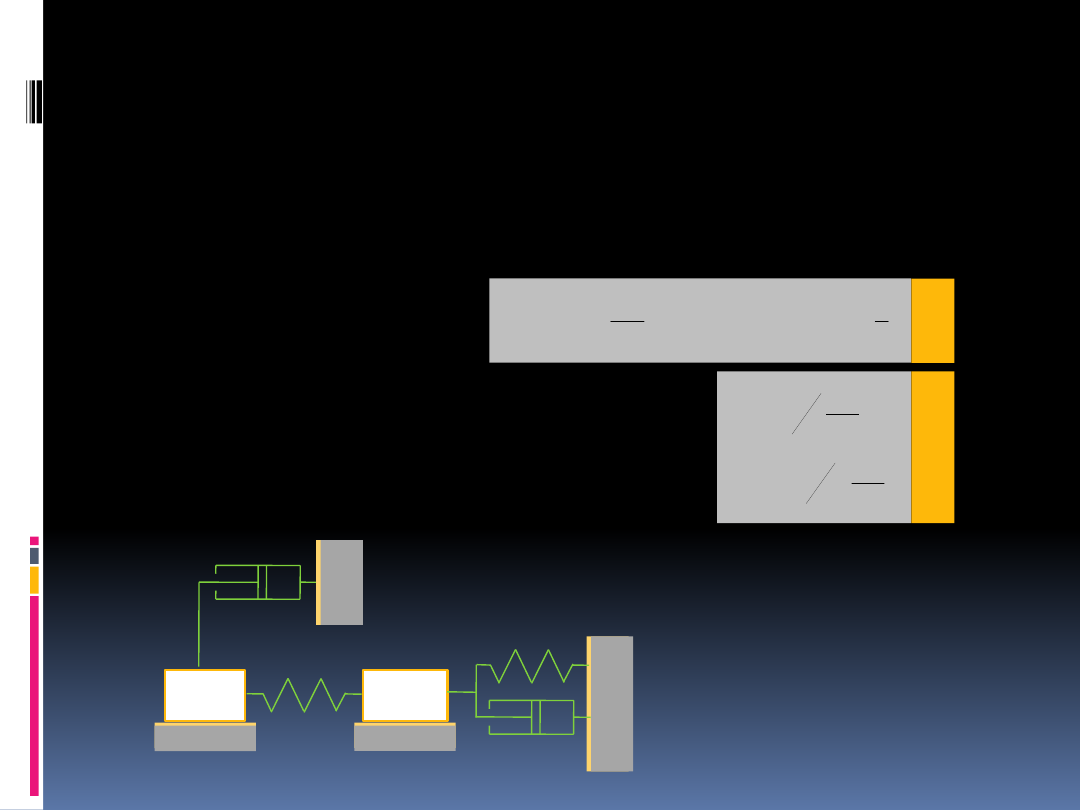
Uwzględnienie założeń dotyczących
tłumienia
tłumienie proporcjonalne do elementu
inercyjnego
21-12-27
22
m
1
m
2
c
1
b
1
c
2
b
2
s
1
8
0
się
przyjmuje
,
m
Ns
2
,
h
hm
b
i
i
1
5
m
Ns
b
m
Ns
b
25
96
5
8
2
1
1
5
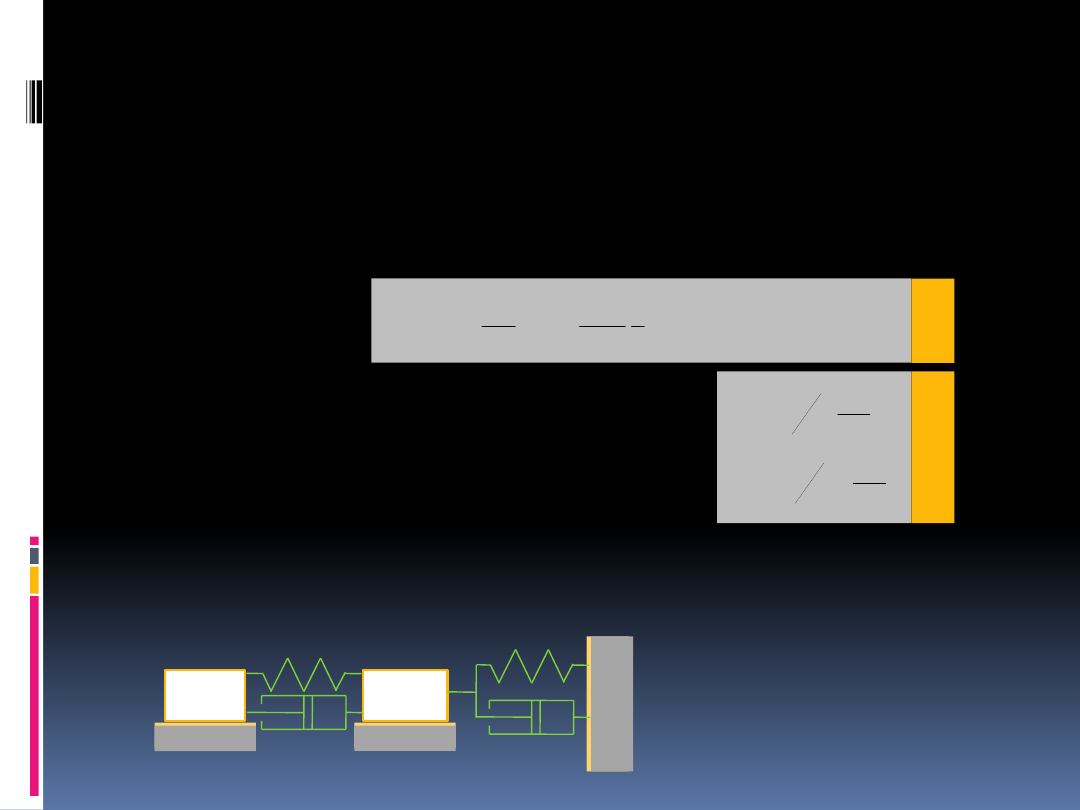
Uwzględnienie założeń dotyczących
tłumienia
tłumienie proporcjonalne do elementu
sprężystego
21-12-27
23
m
1
m
2
c
2
b
2
1
5
m
Ns
b
m
Ns
b
500
7
25
6
2
1
1
5
s
01
0
się
przyjmuje
,
s
1
2
,
m
Ns
2
,
λω
h
c
b
n
n
i
i
c
1
b
1

Bibliografia:
Buchacz A., Dymarek A., Dzitkowski T.: Projektowanie i badanie
wrażliwości ciągłych i dyskretno-ciągłych układów mechanicznych o
żądanym widmie częstotliwości w ujęciu grafów i liczb strukturalnych.
Monografia, Politechnika Śląska, Gliwice 2005.
Dymarek A.: Odwrotne zadanie dynamiki tłumionych mechanicznych
układów drgających w ujęciu grafów i liczb strukturalnych. Politechnika
Śląska, Gliwice 2001.
Kordos M.: Lepsze ułamki. Artykuł miesięcznika Delta 07.2006
21-12-27
24
KONIEC
Document Outline
- Slide 1
- Wstęp teoretyczny
- Ważne pojęcia
- Stany rezonansowe maszyn i urządzeń
- Tłumienie a stany rezonansowe
- Problem syntezy układów
- 3 kroki wyznaczania charakterystyki dynamicznej
- Synteza charakterystyki
- Przykład rozwiązania zadania
- Wymagania
- Założenia
- Tworzenie charakterystyki
- Wstęp do właściwej syntezy
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Otrzymany układ dyskretny
- Sprawdzenie wyniku
- Slide 20
- Slide 21
- Uwzględnienie założeń dotyczących tłumienia
- Uwzględnienie założeń dotyczących tłumienia
- Slide 24
Wyszukiwarka
Podobne podstrony:
28stycznia Projektowanie dyskretnych układów mechanicznych synteza
Projektowanie dyskretnych układów mechanicznych synteza stary off
Projektowanie dyskretnych układów mechanicznych synteza
Projektowanie dyskretnych układów mechanicznych synteza(1)
projekt 3, MBM PWR, Magisterskie, Synteza mechanizmów, Projekty, projekty inne2
Projektowanie analogowych układów scalonych
Projektowanie PKM rysunki mechanizmu zapadkowego 23 04 2013
mechanika gruntów, Strefa Projektowa, studia-rożne, mechanika gruntów
Modelowanie układów mechanicznych
Mechanika Budowli II - Projekty (rok III), Mechanika - Zadanie Projektowe Nr1, Politechnika Gdańska
lab, MetNum2 lab, Laboratorium: ANALIZA I PROJEKTOWANIE KOMPUTEROWE UKŁADÓW ELEKTRONICZNYCH
Projekt podnośnika śrubowego, Mechanika i budowa maszyn, PKMY, Projekt podnosnika
projekt 1 - okładka, BUDOWNICTWO, Mechanika, Mechanika Budowli, rms, Projekt 1 - Metoda Przemieszcze
SYM T 27-01.DOC, MODELOWANIE CIĄGŁYCH I DYSKRETNYCH UKŁADÓW REGULACJI
cwiczenie 4 modelowanie dyskretnych ukladów regulacji
Projektowanie elementów i układów optycznych
L3 Modelowanie układów mechanicznych
modelowanie ciągłych i dyskretnych układów regulacji
EAP-projekt, AGH IMIR Mechanika i budowa maszyn, III ROK, Elementy automatyki przemysłowej, elementy
więcej podobnych podstron