
Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
1
1.
POLITECHNIKA POZNA
ŃSKA
Instytut Konstrukcji Budowlanych
Zakład Mechaniki Budowli
PROJEKT NR 1-OBLICZENIE RAMY METOD
Ą PRZEMIESZCZEŃ
1.1. Wpływ obci
ążenia zewnętrznego
Zadanie:
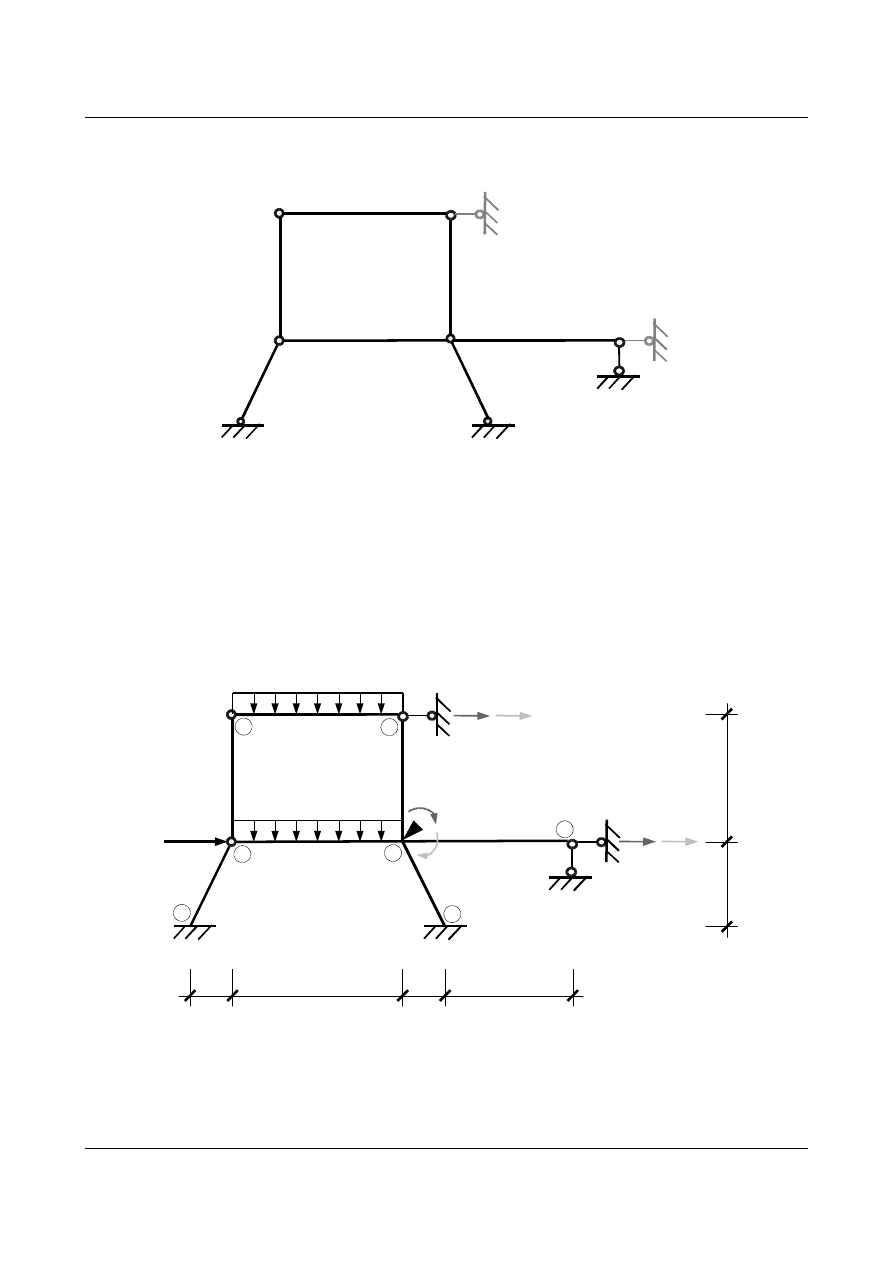
Dla układu przedstawionego na rysunku 1.1 obliczy
ć i wykonać wykresy sił przekrojowych powstałych od
obci
ążenia zewnętrznego. Dokonać odpowiednich sprawdzeń wyników.
10 kN
2 kN/m
6 kN/m
I
1
I
1
I
1
I
1
I
2
I
2
I
2
1
4
1
3
3
2
Rys.1.1. Rama statycznie niewyznaczalna
W zadaniu przyj
ęto przekroje:
I 220 ; I
1
=3060 [cm
4
]=I
I 240 ; I
2
=4250 [cm
4
]=1,389I
Okre
ślenie stopnia geometrycznej niezmienności wg zależności
SGN
=
∑
∑
(1.1)
gdzie:
∑
- liczba w
ęzłów sztywnych układu (z wyłączeniem węzłów podporowych)
∑
- liczba niezale
żnych przesuwów możliwych w układzie
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
2
Liczb
ę w.w. przesuwów określam wykorzystując łańcuch kinematyczny jak na rysunku 1.2:
Rys.1.2.Ła
ńcuch kinematyczny
Jak łatwo zauwa
żyć
∑
=2
, natomiast
∑
=1
st
ąd otrzymujemy:
SGN
=3
(1.2)
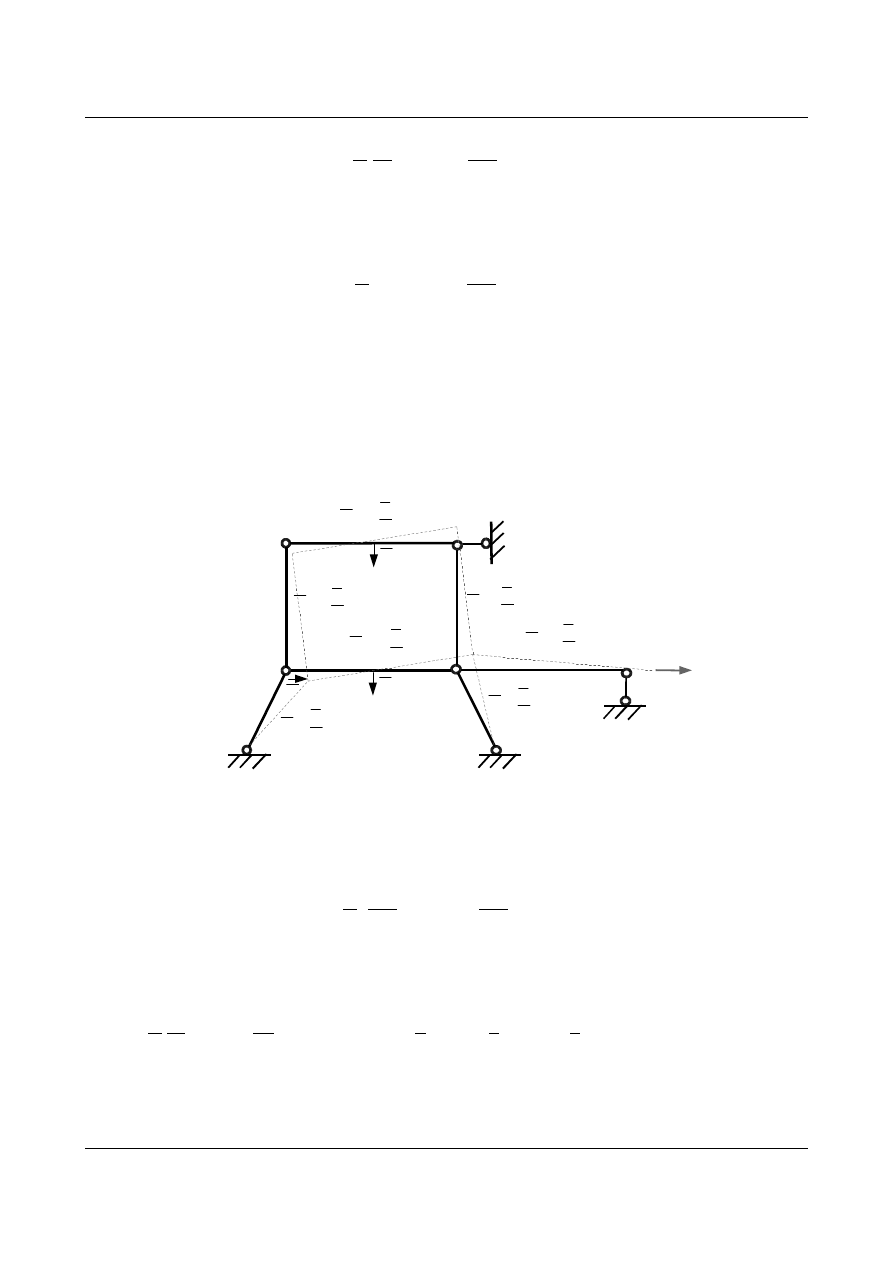
Aby rozpocz
ąć rozwiązywanie zadania metodą przemieszczeń w pierwszej kolejności przyjmuję odpowiedni
układ podstawowy:
10 kN
2 kN/m
6 kN/m
I
1
I
1
I
1
I
1
I
2
I
2
I
2
u
3
=z
1
R
1
u
6
=z
2
R
2
φ
4
=z
3
R
3
1
0
2
3
4
5
6
1
4
1
3
3
2
Rys.1.3.Układ podstawowy
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
3
Identyczno
ść statyczną układu podstawowego z wyjściowym zapewnia układ równań kanonicznych:
{
R
1
=0
R
2
=0
R
3
=0
}
{
r
11
z
1
r
12
z
2
r
13
z
3
R
1P
=0
r
21
z
1
r
22
z
2
r
23
z
3
R
2P
=0
r
31
z
1
r
32
z
2
r
33
z
3
R
3P
=0
}
(1.3)
Aby okre
ślić wartości współczynników r
ik
nale
ży określić wartości momentów zginających wywołanych
stanami z
1
=1, z
2
=1, z
3
=1 oraz stanem obci
ążenia rzeczywistego (siłami zewnętrznymi). W tym celu po
pierwsze nale
ży skorzystać ze wzorów transformacyjnych metody przemieszczeń umożliwiających znalezienie
momentów M
ik
jako funkcji z
1
, z
2
, z
3
, “P”.
Otrzymujemy zatem:
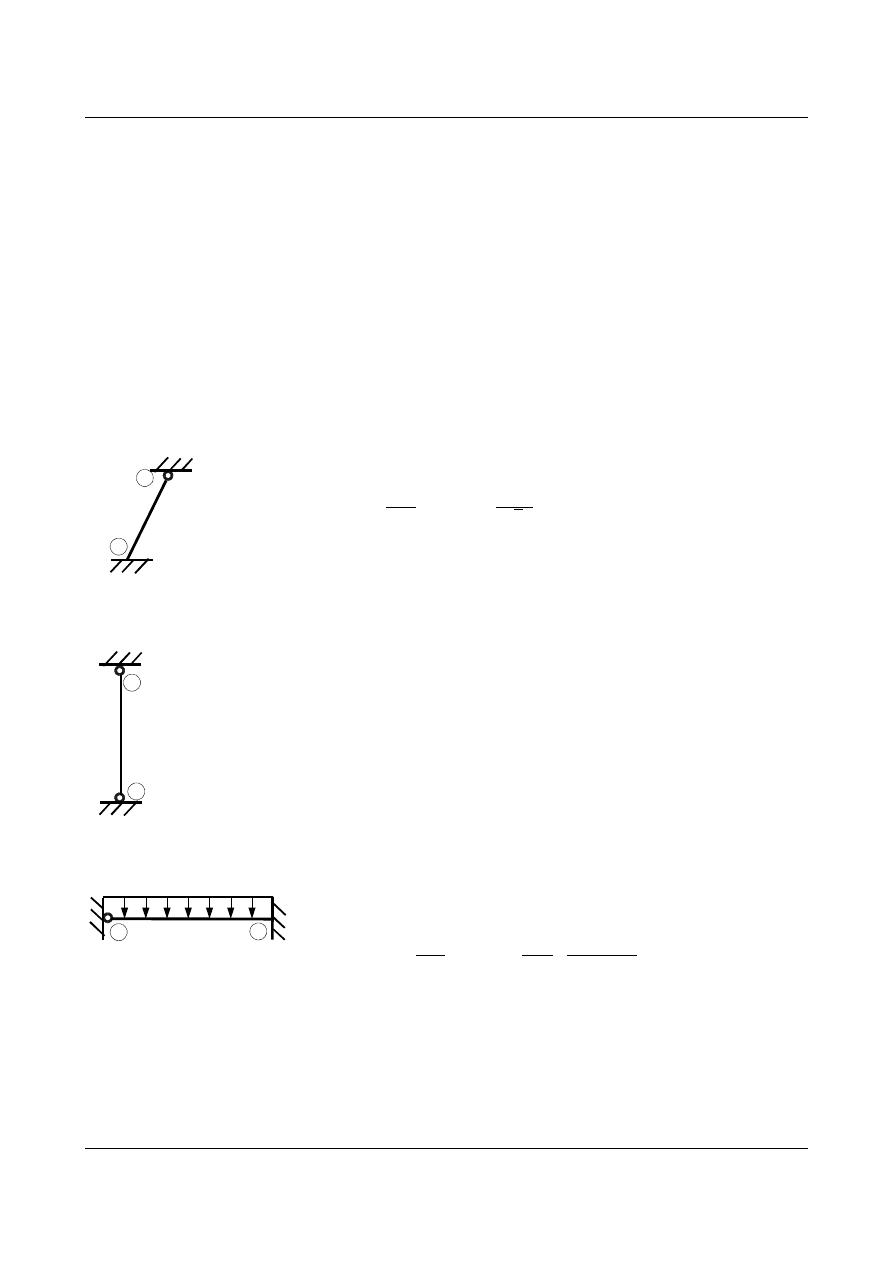
M
01
=
3EI
1
l
01
⋅
0
01
=
3EI
5
⋅
01
M
10
=0
[kNm]
Rys.1.4. Pr
ęt 01
M
12
=0
M
21
=0
[kNm]
Rys.1.5. Pr
ęt 12
M
14
=0
M
41
=
3EI
2
l
14
⋅
4
14
6
⋅4
2
8
=
3
⋅1,389EI
4
⋅ z
3
14
12
[kNm]
Rys.1.6. Pr
ęt 14
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
I
1
1
0
I
1
1
2
I
2
1
4
6 kN/m

Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
4
M
23
=0
M
32
=0
[kNm]
Rys.1.7. Pr
ęt 23
M
34
=0
M
43
=
3EI
1
l
34
⋅
4
34
=EI⋅ z
3
34
[kNm]
Rys.1.8 Pr
ęt 34
M
45
=
2EI
1
l
45
⋅2
4
5
3
45
=
2EI
5
⋅2z
3
3
45
M
54
=
2EI
1
l
45
⋅
4
2
5
3
45
=
2EI
5
⋅ z
3
3
45
[kNm]
Rys.1.9. Pr
ęt 45
M
64
=0
M
46
=
3EI
2
l
46
⋅
4
46
=
3
⋅1,389 EI
4
⋅z
3
46
[kNm]
Rys.1.10. Pr
ęt 46
Pojawiaj
ące się wartości kątów obrotów cięciw (prętów) należy określić z równania łańcucha kinematycznego
jako funkcje niezale
żnych przesuwów (tutaj z
1
oraz z
2
):
ik
= f z
1,
z
2
= f z
1
f z
2
(1.4)
I etap to okre
ślenie funkcji
ik
= f z
1
:
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
I
2
2
3
2 kN/m
I
1
4
5
I
2
4
6
4
3

Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
5
z
1
Ψ
34
1
0
2
3
4
5
6
Ψ
12
Rys.1.11 Ła
ńcuch kinematyczny w stanie z
1
Jak łatwo stwierdzi
ć w tym przypadku:
12
=
34
01
=
14
=
45
=
46
=
23
=0
[rad]
(1.5)
Rozpisuj
ąc natomiast równanie łańcucha kinematycznego na drodze 0123 na kierunek poziomy otrzymujemy:
0123
02
01
3
12
=z
1
⇒
12
=
34
=
z
1
3
[rad]
(1.6)
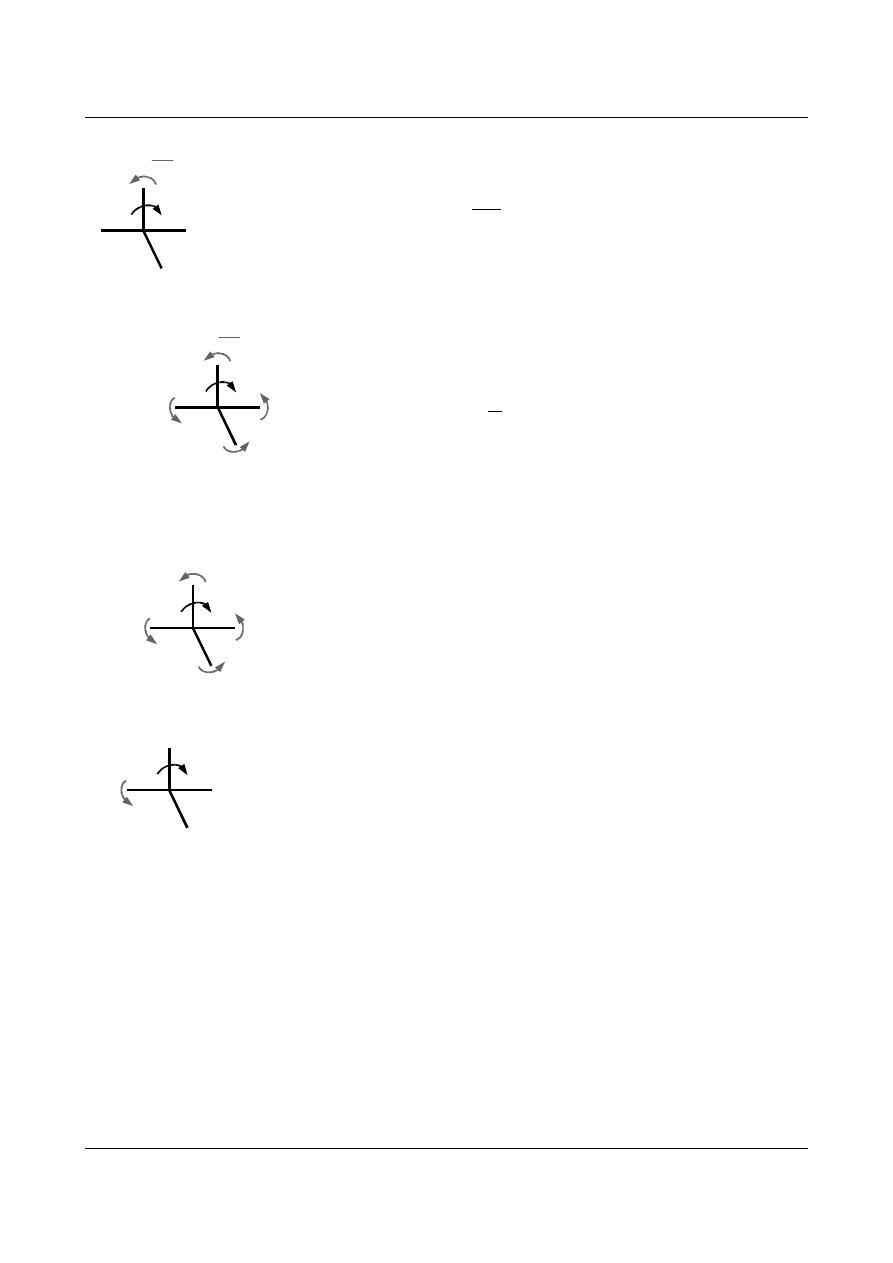
II etap to okre
ślenie funkcji
ik
= f z
2
:
Ψ
12
z
2
Ψ
34
Ψ
01
Ψ
45
Ψ
14
Ψ
23
Ψ
46
Rys.1.12 Ła
ńcuch kinematyczny w stanie z
2
Rozpisuj
ę równanie łańcucha kinematycznego dla podanych niżej dróg:
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
6
546
02
45
=z
2
⇒
45
=
z
2
2
546
0
45
4
46
=0 ⇒
46
=
45
4
=
z
2
8
0146
02
01
=z
2
⇒
01
=
z
2
2
0146
0
01
4
14
4
46
=0 ⇒
14
=
z
2
4
346
03
34
0=z
2
⇒
34
=
z
2
3
0123
02
01
3
12
0=0 ⇒
12
=
z
2
3
012346
0
01
4
23
4
46
=0 ⇒
23
=
z
2
4
[rad]
(1.7)
Zestawienie
ik
= f z
1,
z
2
= f z
1
f z
2
(z zasady superpozycji):
01
=
z
2
2
12
=
z
1
3
z
2
3
23
=
z
2
4
14
=
z
2
4
34
=
z
1
3
z
2
3
45
=
z
2
2
46
=
z
2
8
[rad]
(1.8)
St
ąd wartości momentów przęsłowych wynoszą;
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
7
M
01
=
3EI
5
⋅
z
2
2
M
10
=0
M
12
=0
M
21
=0
M
14
=0
M
41
=
4,167 EI
4
⋅ z
3
z
2
4
12
M
23
=0
M
32
=0
M
34
=0
M
43
=EI⋅ z
3
z
1
3
z
2
3
M
45
=
2EI
5
⋅2z
3
3
2
⋅z
2
M
54
=
2EI
5
⋅z
3
3
2
⋅z
2
M
64
=0
M
46
=
4,167 EI
4
⋅ z
3
z
2
8
[kNm]
(1.9)
Na podstawie wzorów 1.9 okre
ślam wartości momentów od poszczególnych stanów obciążeń:
Stan z
1
=1
1
0
2
3
4
5
6
EI
3
-EI
3
r
11
r
21
r
31
Rys.1.13. Stan z
1
=1 – M
1
(0)
Stan z
2
=1
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater

Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
8
0,671 EI
r
12
r
22
r
32
1,342 EI
0,26 EI
1,342 EI
0,13 EI
EI
3
-1,342 EI
0,26 EI
-1,342 EI
-0,13 EI
EI
3
-0,671 EI
Rys.1.14. Stan z
2
=1- M
2
(0)
Stan z
3
=1
r
13
r
23
r
33
0,894 EI
1 EI
1,042 EI
0,894 EI
1,042 EI
1,789 EI
1,042 EI
1 EI
1,789 EI
1,042 EI
Rys.1.15. Stan z
3
=1- M
3
(0)
Stan P
4
R
1P
R
3P
12
R
2P
12
24
8
10
Rys.1.16 Stan P – obci
ążenie zewnętrzne -M
P
[kNm]
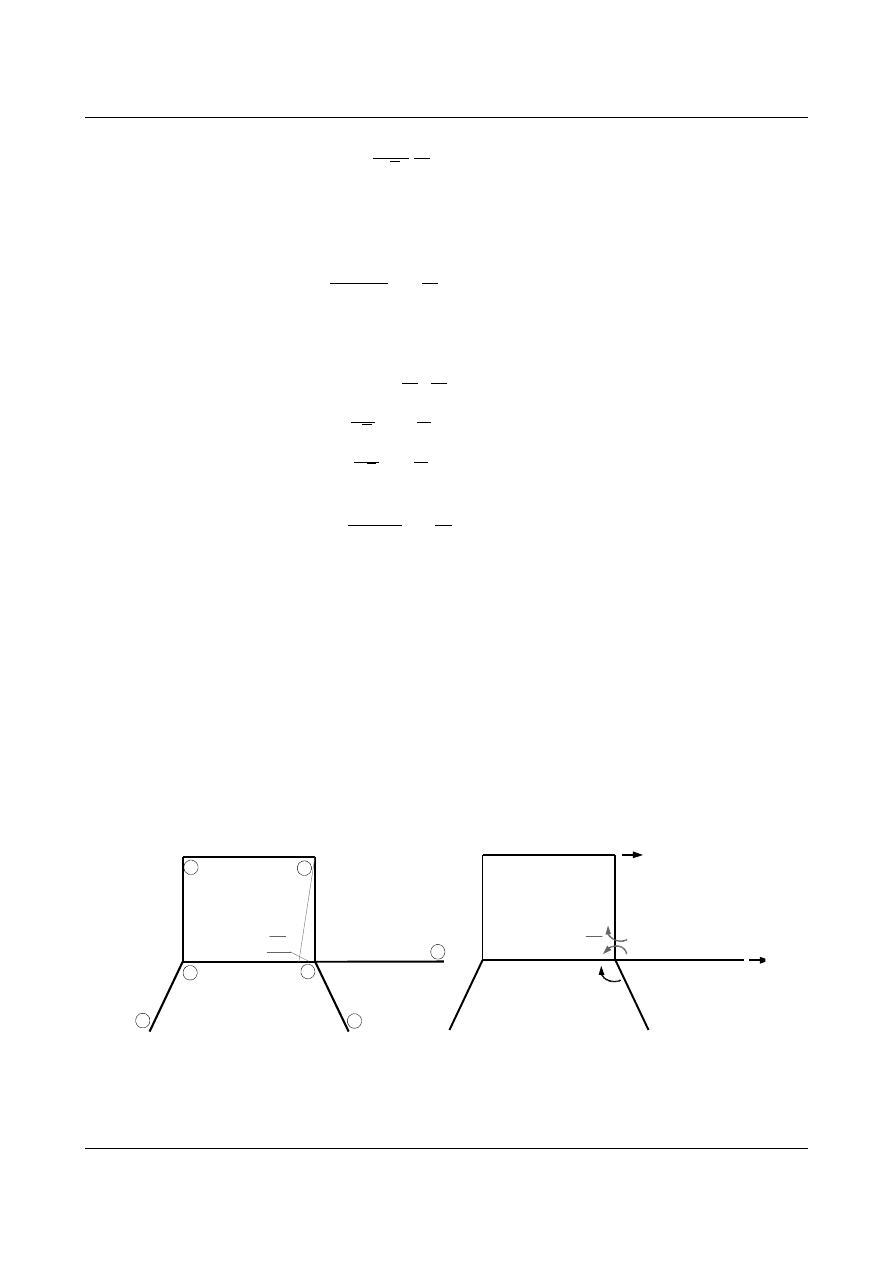
Okre
ślenie współczynników r
ik
dla trzeciego równania kanonicznego a wi
ęc r
31
, r
32
, r
33
, R
3P
z wykorzystaniem
równowagi w
ęzła 4:
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
9
r
31
=
EI
3
Rys.1.17 Równowaga w
ęzła 4 w stanie z
1
=1
r
32
=EI
1
3
0,261,3420,13
r
32
=0,8787 EI
Rys.1.18 Równowaga w
ęzła 4 w stanie z
2
=1
r
33
=EI 1 2 ⋅1,0421,789
r
33
=4,873 EI
Rys.1.19 Równowaga w
ęzła 4 w stanie z
3
=1
R
3P
=12 [kNm]
Rys.1.20 Równowaga w
ęzła 4 w stanie P
Aby obliczy
ć pozostałe współczynniki układu równań kanonicznych r
ik
nale
ży skorzystać z zasady pracy
wirtualnej w wirtualnym stanie przemieszcze
ń.
Stan wirtualny I -
z
1
=1
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
r
31
- EI
3
r
32
0,26 EI
-1,342 EI
-0,13 EI
EI
3
r
33
1,042 EI
1,789 EI
1,042 EI
1 EI
R
3P
12

Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
10
z
1
=1
Ψ
34
=
1
0
2
3
4
5
6
Ψ
12
=
1
3
1
3
Rys.1.21. Stan wirtualny przemieszcze
ń z
1
=1
Obliczaj
ąc pracę sił w stanie rzeczywistym z
1
=1 na przemieszczeniach wirtualnych jak na rysunku 1.21
otrzymujemy:
r
11
⋅1
1
3
⋅
EI
3
=0 ⇒r
11
=
EI
9
(1.10)
Obliczaj
ąc pracę sił w stanie rzeczywistym z
2
=1 na przemieszczeniach wirtualnych jak na rysunku 1.21
otrzymujemy:
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
11
r
12
⋅1
1
3
⋅
EI
3
=0 ⇒ r
12
=
EI
9
(1.11)
Obliczaj
ąc pracę sił w stanie rzeczywistym z
3
=1 na przemieszczeniach wirtualnych jak na rysunku 1.21
otrzymujemy:
r
13
⋅1
1
3
⋅EI=0 ⇒ r
13
=
EI
3
(1.12)
Obliczaj
ąc pracę sił w stanie rzeczywistym P na przemieszczeniach wirtualnych jak na rysunku 1.21
otrzymujemy:
R
1P
⋅1=0 ⇒R
1P
=0 [kN ]
(1.13)
Stan wirtualny II -
z
2
=1
Rys.1.22. Stan wirtualny przemieszcze
ń
z
2
=1
Obliczaj
ąc pracę sił w stanie rzeczywistym z
1
=1 na przemieszczeniach wirtualnych jak na rysunku 1.22
otrzymujemy:
r
21
⋅1
1
3
⋅
EI
3
=0 ⇒r
11
=
EI
9
(1.14)
Obliczaj
ąc pracę sił w stanie rzeczywistym z
2
=1 na przemieszczeniach wirtualnych jak na rysunku 1.22
otrzymujemy:
r
22
⋅1
1
3
⋅
EI
3
0,26 EI⋅
1
4
1,3421,342 EI⋅
1
2
0,13EI⋅
1
8
0,671 EI⋅
1
2
=0 ⇒r
22
=1,87 EI
(1.15)
Obliczaj
ąc pracę sił w stanie rzeczywistym z
3
=1 na przemieszczeniach wirtualnych jak na rysunku 1.22
otrzymujemy:
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
Ψ
12
= -
1
3
z
2
=1
Ψ
34
= -
1
3
1
3
Ψ
01
=
1
1
2
Ψ
45
=
1
1
2
Ψ
14
= -
1
1
4
Ψ
23
= -
1
1
4
Ψ
46
=
1
1
8
v
A
v
B
u
1

Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
12
r
23
⋅1EI⋅
1
3
1,042EI⋅
1
4
1,7890,894EI⋅
1
2
1,042 EI⋅
1
8
=0 ⇒r
23
=0,8782 EI
(1.16)
Aby obliczy
ć pracę sił w stanie rzeczywistym P oprócz wirtualnych kątów obrotu prętów przedstawionych na
rysunku 1.22. musimy zna
ć również wirtualne przemieszczenia pionowe punktów A, B (punkty przyłożenia sił
wypadkowych od obci
ążenia ciągłego na prętach 14 i 23) oraz poziome przemieszczenie wirtualne węzła 1
(jako droga, na której prac
ę wykonuje pozioma siła 10 [kN]).
Warto
ści szukanych przemieszczeń wyznaczam z równania łańcucha kinematycznego:
01
02 ⋅
01
= u
1
⇒
u
1
=2 ⋅
1
2
=
1
012A
0
01
2
23
=
v
A
⇒ v
A
=
1
2
2 ⋅
1
4
=0
01B
0
01
2
14
=
v
B
⇒
v
B
=
1
2
2 ⋅
1
4
=0
(1.17)
St
ąd z zasady pracy wirtualnej:
R
2P
⋅112 ⋅
1
4
1
⋅10=0 ⇒ R
2P
=7 [kN ]
(1.18)
Uwzgl
ędniając powyższe wartości współczynników r
ik
układ równa
ń kanonicznych 1.3. przyjmie postać:
{
EI
9
z
1
EI
9
z
2
EI
3
z
3
=0
EI
9
z
1
1,87EI z
2
0,879 EI z
3
7=0
EI
3
z
1
0,879EI z
2
4,873 EI z
3
12=0
}
(1.19)
Rozwi
ązanie powyższego układu jest następujące:
EI z
1
=4,735
EI z
2
=2,352
EI z
3
=2,362
(1.20)
Podstawiaj
ąc wartości niewiadomych (1.20) do wzorów 1.9. otrzymam następujące wartości przęsłowych
momentów przyw
ęzłowych:
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater

Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
13
M
01
=1,578
M
10
=0
M
12
=0
M
21
=0
M
14
=0
M
41
=10,152
M
23
=0
M
32
=0
M
34
=0
M
43
=0
M
45
=7,381
M
54
=5,268
M
64
=0
M
46
=2,767
[kNm]
(1.21)
Rys.1.23. Momenty zginaj
ące w układzie statycznie niewyznaczalnym M
(n)
[kNm]
Maksymalne warto
ści momentów wynoszą:
∣M
max1
∣=7,381 [kNm ]
dla pr
ętów o sztywności EI
1
∣M
max2
∣=10,152 [kNm]
dla pr
ętów o sztywności EI
2
Wst
ępną poprawność wyników wykazuję poprzez sprawdzenie równowagi węzła 4:
10,152
2,767
7,381
Rys.1.24 Równowaga w
ęzła 4
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
10,152
4
1,578
5,268
7,381
2,767
7,46
1,58
Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
14
∑
M
=7,3812,76710,152=0,004 ≈0 [kNm]
(1.22)
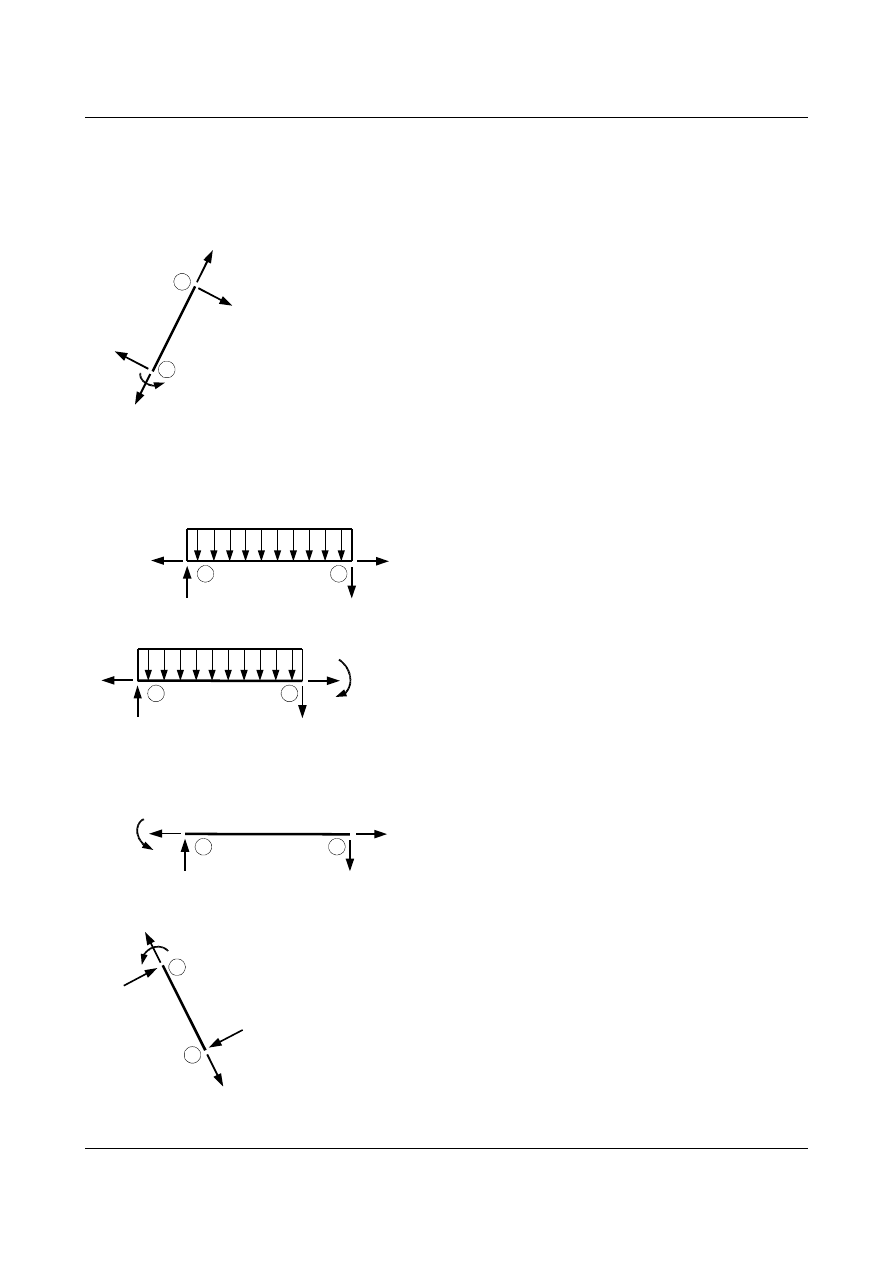
Maj
ąc określone wartości momentów zginających na każdym pręcie układu mogę obliczyć wartości sił
tn
ących w tych prętach
∑
M
0
=0 ⇒T
01
=T
10
=0,706 [kN ]
Rys.1.25. Pr
ęt 01
T
12
=T
21
=0 [kN]
T
34
=T
43
=0 [kN]
∑
M
2
=0 ⇒T
32
=4 [kN]
∑
M
3
=0 ⇒T
23
=4 [kN]
Rys.1.26. Pr
ęt 23
∑
M
1
=0 ⇒T
41
=14,538 [kN ]
∑
M
4
=0 ⇒T
14
=9,462 [kN ]
Rys.1.27. Pr
ęt 14
∑
M
4
=0 ⇒T
64
=0,692 [kN ]
∑
M
6
=0 ⇒T
46
=0,692 [kN ]
Rys.1.28. Pr
ęt 46
∑
M
4
=0 ⇒T
54
=5,657 [kN]
T
45
=T
54
=5,657 [kN ]
Rys.1.29 Pr
ęt 45
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
1
0
N
01
N
10
T
10
T
01
1,578
2
3
N
23
N
32
T
32
T
23
2 [kN/m]
1
4
N
14
N
41
T
41
T
14
6 [kN/m]
10,152
4
6
N
46
N
64
T
64
T
46
2,767
N
54
N
45
T
54
T
45
7,381
4
5
Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
15
Zestawiaj
ąc otrzymane wyniki otrzymuję:
4
4
-
+
+
-
9,462
14,538
+ 5,657
+
0,692
+
0,706
Rys.1.30. Siły tn
ące w układzie statycznie niewyznaczalnym T
(n)
[kN]
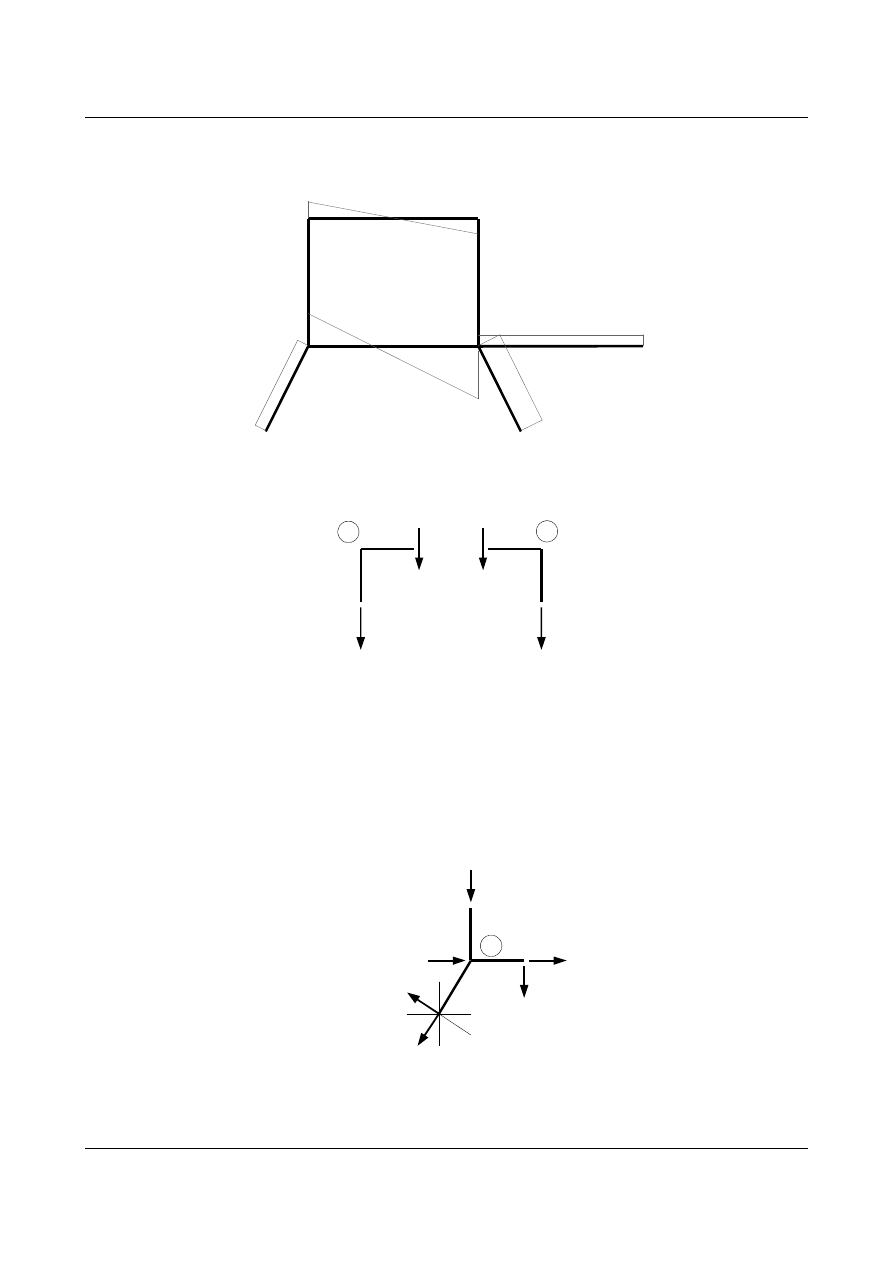
Wyznaczaj
ąc wartości sił normalnych występujących w zadanej ramie korzystam z równowagi węzłów.
4 [kN]
N
12
=N
21
N
34
=N
43
2
3
Rys.1.31. Równowaga w
ęzłów 2 i 3
Z równowagi w
ęzła 2:
N
12
=N
21
=4 [kN ]
(1.23)
Z równowagi w
ęzła 3:
N
34
=N
43
=4 [kN ]
(1.24)
10
4
N
14
=N
41
9,462
0,706
N
01
=N
10
α
α
1
Rys.1.32.Równowaga w
ęzła 1
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater

Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
16
Dane:
sin
=
5
5
; cos
=
2
5
5
Z równowagi w
ęzła 1:
∑
Y
=0 :49,462N
01
cos
0,706 sin=0 ⇒N
01
=N
10
=14,698 [kN ]
∑
X
=0 :10N
14
0,706 cos 14,698 sin=0 ⇒N
14
=N
41
=15,942 [kN ]
(1.25)
Dla pr
ęta 46 otrzymujemy:
N
46
=N
64
=0 [kN ]
(1.26)
4
15,942
14,538
0,692
N
45
=N
54
α
α
5,657
4
Rys.1.33.Równowaga w
ęzła 4
Dane:
sin
=
5
5
; cos
=
2
5
5
Z równowagi w
ęzła 4:
∑
X
=0 :15,9425,657cos N
45sin
=0 ⇒ N
45
=N
54
=24,333 [kN]
(1.27)
Zestawiaj
ąc otrzymane wyniki otrzymuję:
Rys.1.34. Siły normalne w układzie statycznie niewyznaczalnym N
(n)
[kN]
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
4
4 -
-
-
-
14,698
-
15,942
24,333

Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
17
Aby sprawdzi
ć poprawność uzyskanych wyników dokonuję kontroli statycznej:
10 kN
2 kN/m
6 kN/m
0,706
14,698
α
α
0,692
24,333
α
α
5,657
1,578
5,268
Rys.1.35. Kontrola statyczna-siły działaj
ące na zadany układ
∑
X
=0 :0,706 cos14,698 sin105,657 cos 24,333 sin =0,00014 ≈0 [kN ]
∑
Y
=0 :14,69824,333 cos 0,7065,657sin 0,6922 ⋅46 ⋅4=0,00423 ≈0 [kN ]
∑
M
1
=0:1,5780,706⋅
5
5,2686 ⋅4 ⋅22 ⋅4 ⋅20,692 ⋅824,333cos ⋅5sin ⋅2
5,657 cos ⋅2sin ⋅5=0,0187 ≈0 [kNm]
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater

Cz
ęść 1
PROJEKT NR 1 – OBLICZANIE RAMY METOD
Ą PRZEMIESZCZEŃ
18
Sprawdzenie napr
ężeń normalnych wywołanych momentami zginającymi.
Napr
ężenia określam wg zależności:
=
∣M
max
∣
I
y
⋅z
max
≤
dop
Przyjmuj
ę:
dop
=19 [kN /cm
2
]
Na pr
ętach o sztywności EI
1
maksymalny moment zginaj
ący:
∣M
max1
∣=7,381 [kNm]=738,1 [kNcm]
dla
I
1
=3060 [cm
4
], I 220 z
max
=11 cm
st
ąd:
=
738,1
3060
⋅11 =2,65 [
kN
cm
2
]
2,65
[
kN
cm
2
]≤19 [
kN
cm
2
]
Na pr
ętach o sztywności EI
2
maksymalny moment zginaj
ący:
∣M
max 2
∣=10,152 [kNm ]=1015,2 [kNcm]
dla
I
2
=4250 [cm
4
], I 240 z
max
=12 cm
st
ąd:
=
1015,2
4250
⋅12=2,87 [
kN
cm
2
]
2,87
[
kN
cm
2
]≤19 [
kN
cm
2
]
Napr
ężenia w obu przypadkach są znacznie mniejsze od dopuszczalnych . Wniosek: kształtowniki, z których
wykonano konstrukcj
ę mogłyby mieć mniejsze przekroje.
Anna Zielona gr 3KBI Metoda przemieszcze
ń
AlmaMater
Wyszukiwarka
Podobne podstrony:
Metoda przemieszczen- obciazenie1
Metoda przemieszczen- obciazenie3
Metoda przemieszczen obciazenie5
Metoda przemieszczen obciazeni Nieznany
Metoda przemieszczen obciazenie4
Metoda przemieszczen obciazenie3
Metoda przemieszczen obciazenie8
Metoda przemieszczen obciazenie3
Metoda przemieszczen obciazenie6
Metoda przemieszczen obciazenie2
belka obroty i przesuwy metoda przemieszczeń
Linie wpływu Metoda przemieszczeń mmp belka lw
Metoda przemieszczeń
Uproszczona metoda obliczania obciążenia cieplnego pomieszczenia
cwicz mechanika budowli metoda przemieszczen rama ugiecie
Metoda przemieszczen projekt4
więcej podobnych podstron