
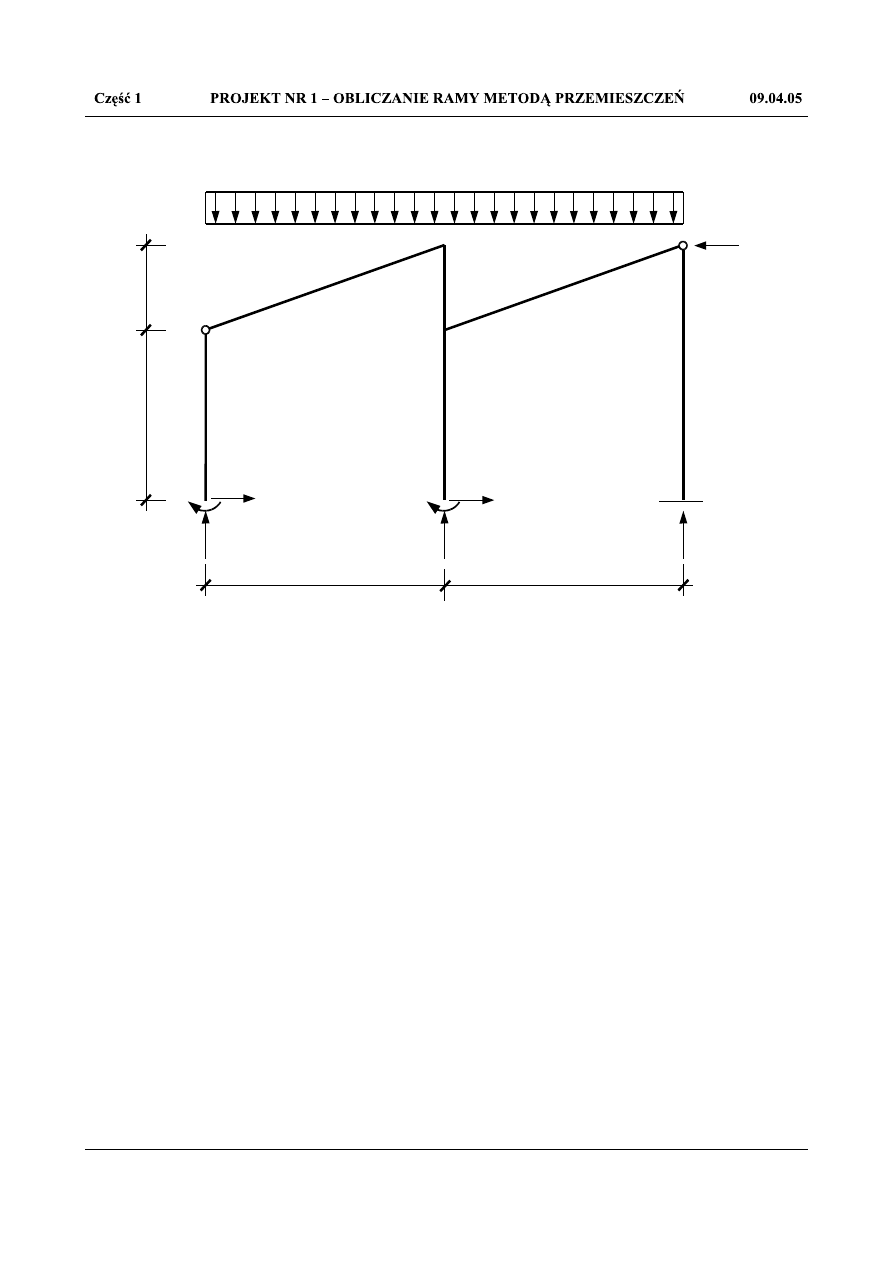
6 [kN/m]
2
4
6
6
I
1
I
1
I
1
I
1
I
2
I
2
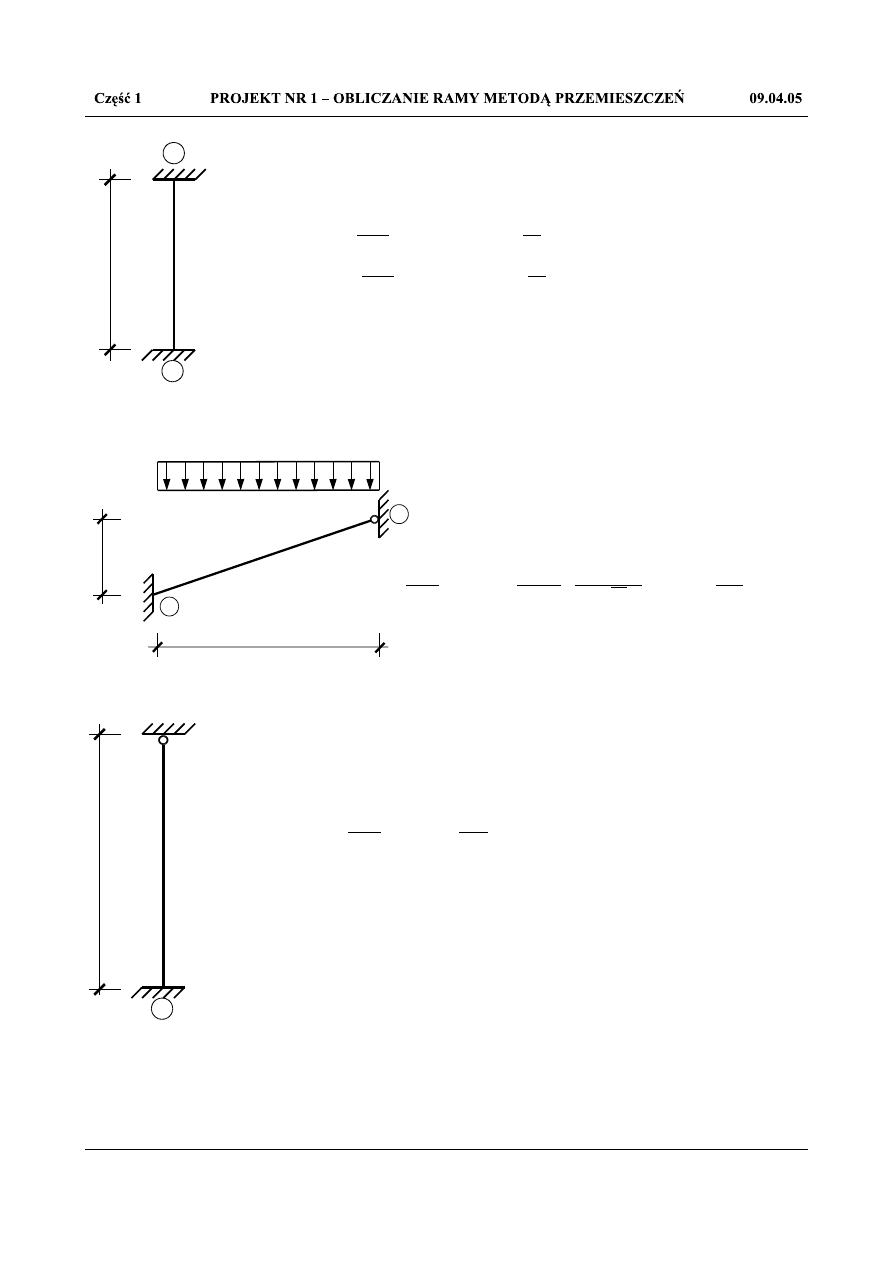
Rys.1.1. Zadany schemat ramy statycznie niewyznaczalnej
SGN =
∑
∑
∑
∑
∑
=
∑
=
1/18

SGN
=3
(1.2)
W pierwszej kolejności przyjmuję odpowiedni układ podstawowy:
6 [kN/m]
2
4
I
1
I
1
I
1
I
1
I
2
I
2
0
1
2
3
4
6
5
6
R
2
R
1
R
3
φ
3
=z
3
u
2
=z
1
φ
2
=z
2
Rys.1.2.Układ podstawowy
Układ równań kanonicznych metody przemieszczeń przyjmuje postać:
{
R
1
=0
R
2
=0
R
3
=0
}
{
r
11
z
1
r
12
z
2
r
13
z
3
R
1 P
=0
r
21
z
1
r
22
z
2
r
23
z
3
R
2 P
=0
r
31
z
1
r
32
z
2
r
33
z
3
R
3 P
=0
}
(1.3)
Wykorzystując wzory transformacyjne metody przemieszczeń określę wartości przęsłowych przywęzłowych
momentów M
ik
jako funkcji z
1
, z
2
, z
3
, “P”, co w późniejszym etapie umożliwi obliczenie współczynników
Tomasz Terlecki gr 3 KBI
2/18

r
ik
równań kanonicznych.
Otrzymujemy zatem:
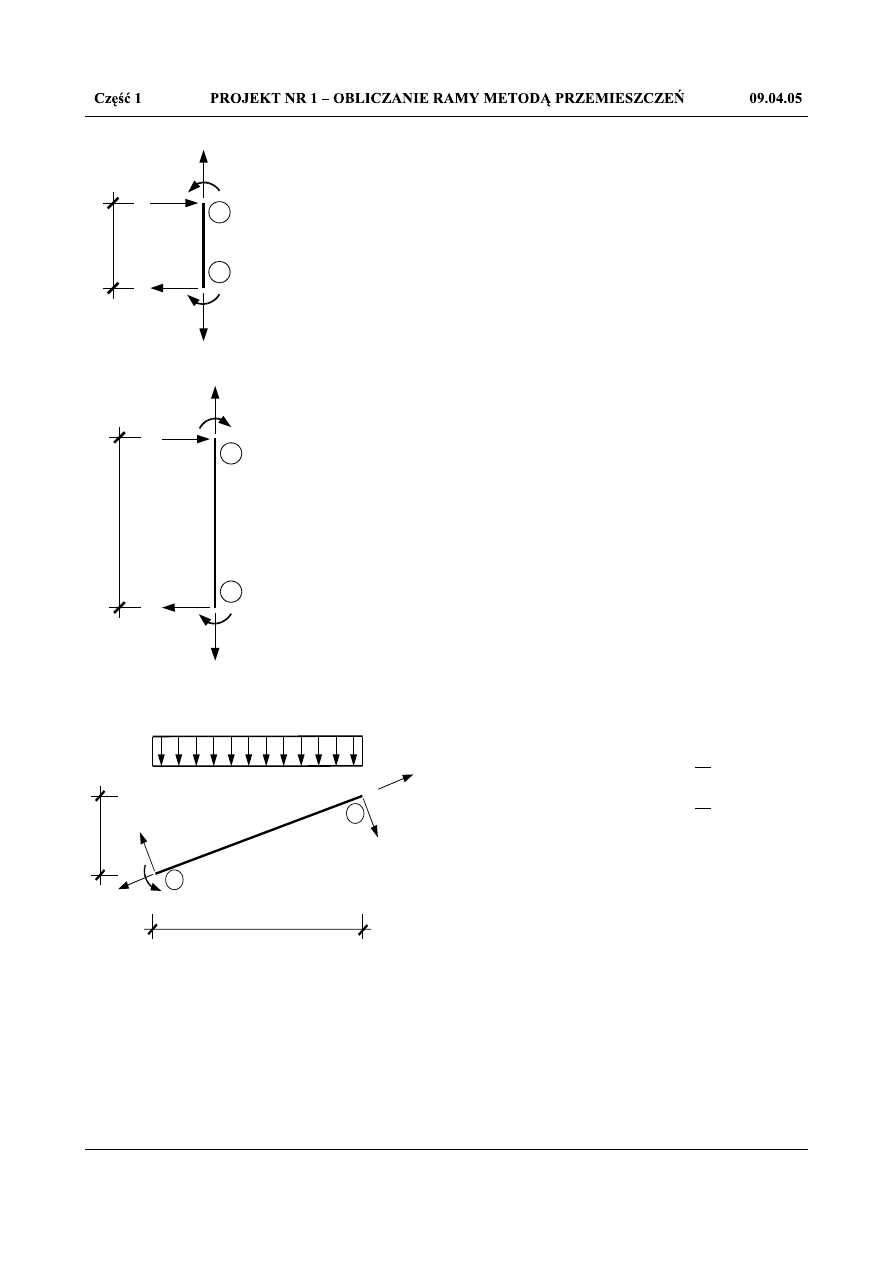
M
01
=
3 EI
1
l
01
⋅
0
−
01
=
−3 EI
4
⋅
01
M
10
=0
[kNm]
Rys.1.3. Pręt 01
M
12
=0
M
21
=
3 EI
2
l
12
⋅
2
−
12
q⋅l
12
x
2
8
=
3⋅1,389 ⋅EI
2
10
⋅ z
2
−
12
6⋅6
2
8
[kNm]
Rys.1.4. Pręt 12
M
23
=
2 EI
1
l
23
⋅2
2
3
−3
23
=EI⋅2 z
2
z
3
−3
23
M
32
=
2 EI
1
l
23
⋅
2
2
3
−3
23
=EI⋅ z
2
2 z
3
−3
23
[kNm]
Rys.1.5. Pręt 23
Tomasz Terlecki gr 3 KBI
3/18
4
I
1
0
1
6 [kN/m]
2
6
I
2
1
2
2
I
1
2
3
M
34
=
2 EI
1
l
34
⋅2
3
4
−3
34
=
EI
2
⋅2 z
3
−3
34
M
43
=
2 EI
1
l
34
⋅
3
2
4
−3
34
=
EI
2
⋅ z
3
−3
34
[kNm]
Rys.1.6. Pręt 34
M
53
=0
M
35
=
3 EI
2
l
35
⋅
3
−
35
−
q⋅l
35
x
2
8
=
3⋅1,389 EI
2
10
⋅ z
3
−
35
−
6⋅6
2
8
[kNm]
Rys.1.7 Pręt 35
M
56
=0
M
65
=
3 EI
1
l
56
⋅
6
−
56
=
−EI
2
⋅
56
[kNm]
Rys.1.8. Pręt 56
Tomasz Terlecki gr 3 KBI
4/18
4
I
1
3
4
6 [kN/m]
2
6
I
2
3
5
6
I
1
6
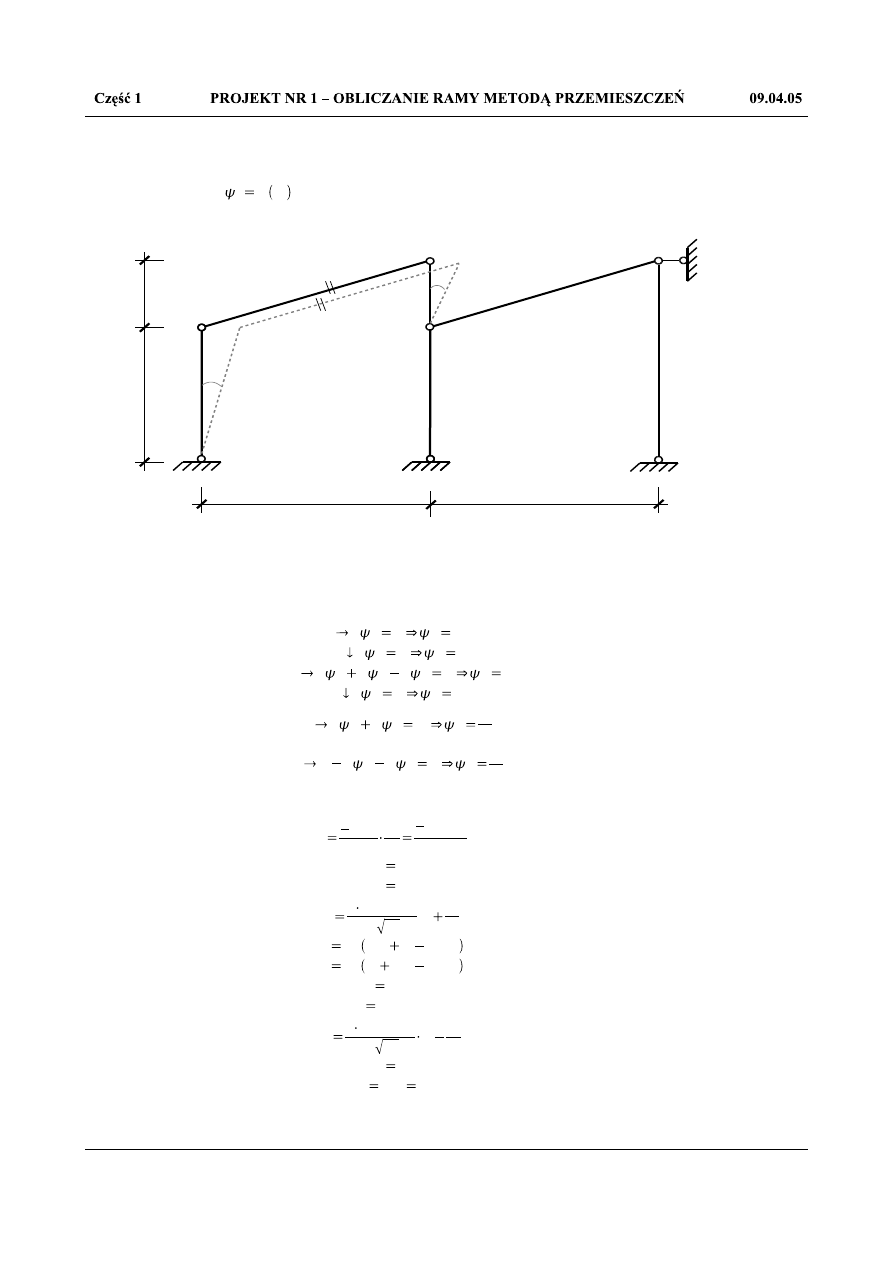
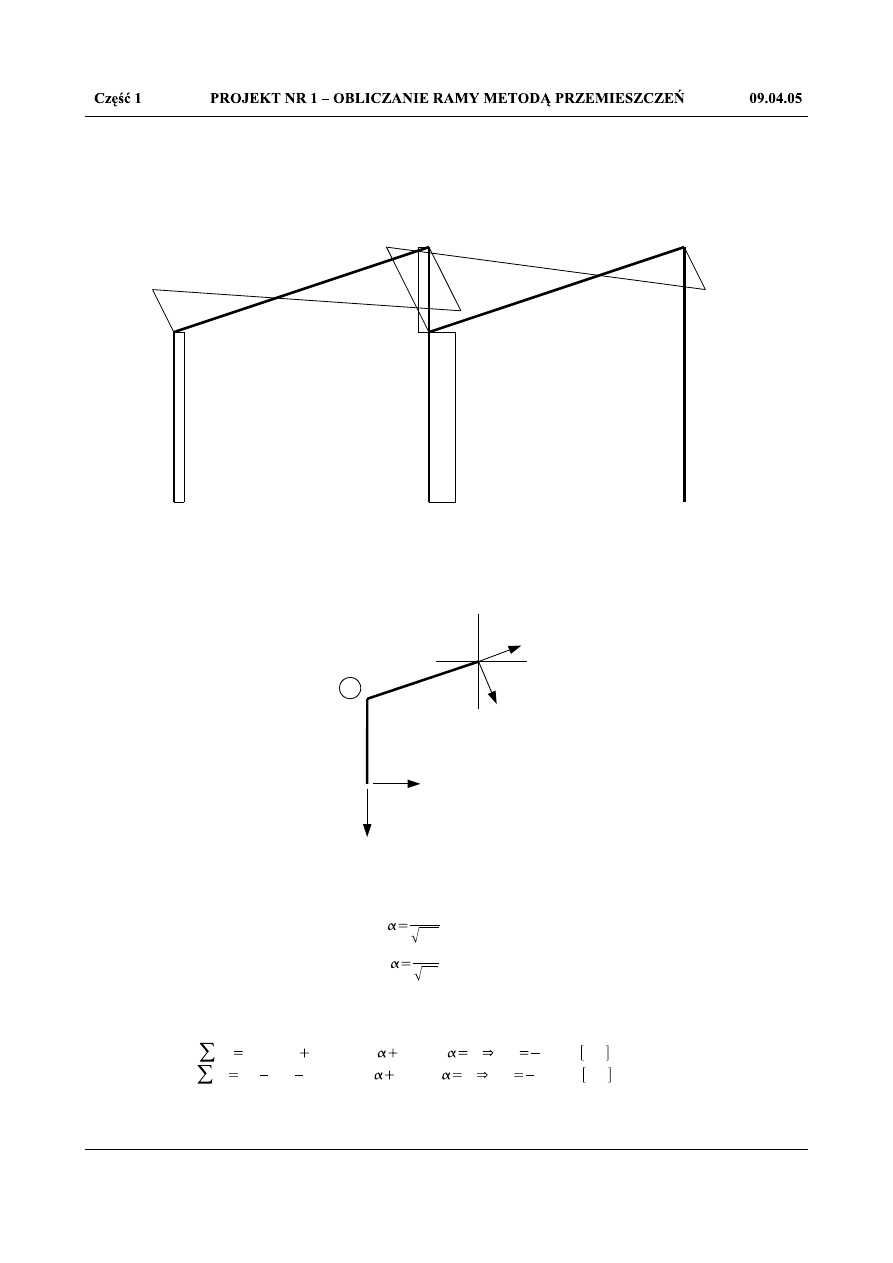
Pojawiające się wartości kątów obrotów cięciw (prętów) należy określić z równania łańcucha
kinematycznego jako funkcje niezależnych przesuwów (tutaj z
1
):
Określenie funkcji
ik
f z
1
:
2
4
6
6
ψ
01
ψ
23
Rys.1.9 Łańcuch kinematyczny w stanie z
1
Rozpisuję równanie łańcucha kinematycznego dla podanych niżej dróg:
56
6
56
0
56
0
4356 6
35
0
35
0
4356
4
34
2
35
6
56
0
34
0
012 6
12
0
12
0
012
4
01
2
12
z
1
01
z
1
4
234
z
1
2
23
4
34
0
23
z
1
2
[rad]
(1.4)
Stąd wartości momentów przęsłowych wynoszą;
M
01
3 EI
4
z
1
4
3 EI z
1
16
M
10
0
M
12
0
M
21
3 1,389 EI
2 10
z
2
6
3
8
M
23
EI 2 z
2
z
3
1,5 z
1
M
32
EI z
2
2 z
3
1,5 z
1
M
34
EI z
3
M
43
0,5 EI z
3
M
35
3 1,389 EI
2 10
z
3
6
3
8
M
53
0
M
65
M
56
0
[kNm]
(1.5)
Na podstawie wzorów 1.5. określam wartości momentów od poszczególnych stanów obciążeń:
Tomasz Terlecki gr 3 KBI
5/18
Stan z
1
=1
3
16
E I
1
3
2 E I
1
3
2 E I
1
r
11
r
31
r
21
3
16
E I
1
3
2 E I
1
3
2 E I
1
r
11
r
31
r
21
-
-
-
Rys.1.10. Stan z
1
=1 – M
1
(0)
Stan z
2
=1
Tomasz Terlecki gr 3 KBI
6/18
2 E I
1
E I
1
r
12
r
32
r
22
2 E I
1
E I
1
r
12
r
22
0,659 E I
1
r
32
0,659 E I
1
Rys.1.11. Stan z
2
=1- M
2
(0)
Stan z
3
=1
Tomasz Terlecki gr 3 KBI
7/18
E I
1
2 E I
1
r
13
r
33
r
23
E I
1
r
13
r
23
r
33
0,659 E I
1
E I
1
E I
1
2
E I
1
2
2 E I
1
E I
1
0,659 E I
1
Rys.1.12 Stan z
3
=1- M
3
(0)
Stan P
Tomasz Terlecki gr 3 KBI
8/18

R
1P
R
3P
R
2P
27
-27
27
27
R
1P
R
3P
R
2P
Rys.1.13 Stan P – obciążenie zewnętrzne -M
P
[kNm]
Tomasz Terlecki gr 3 KBI
9/18
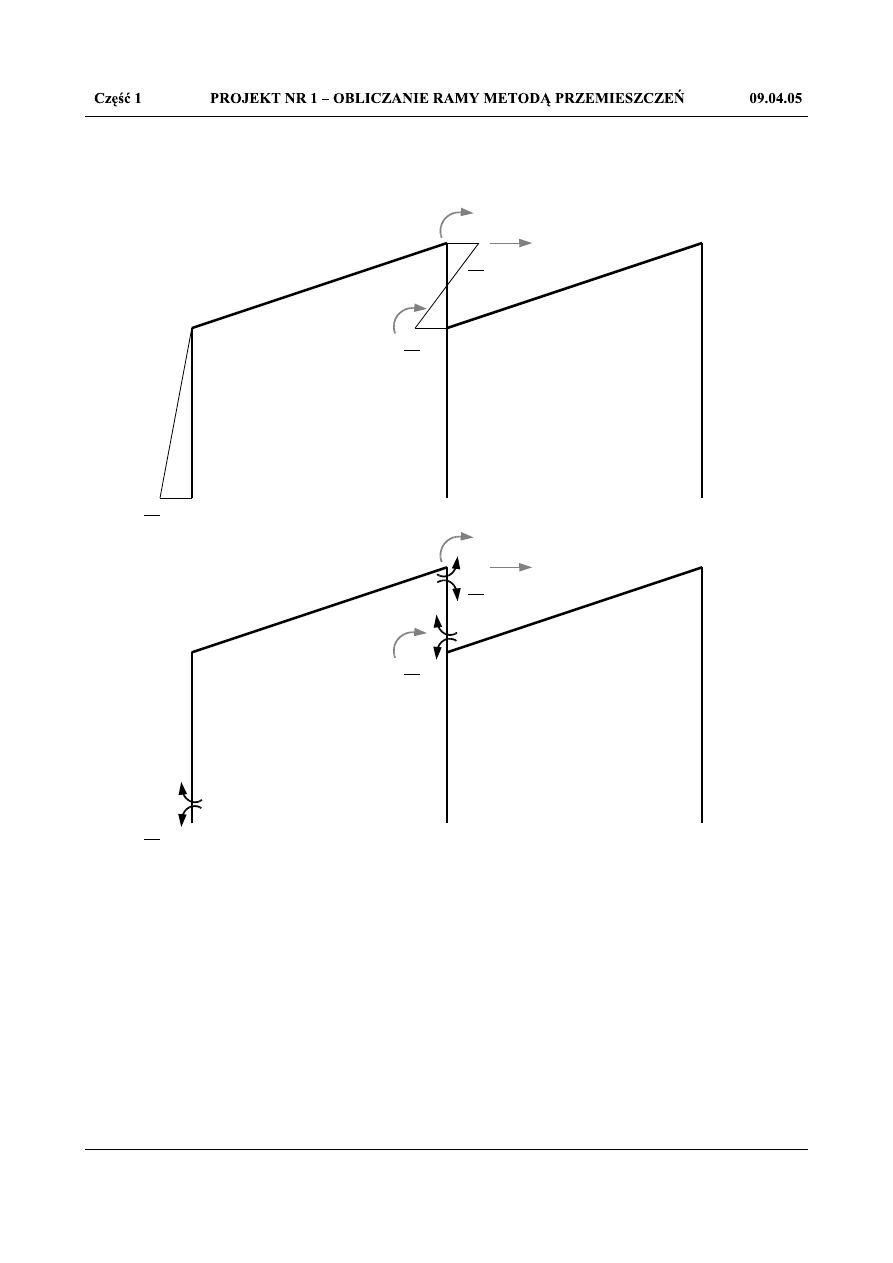
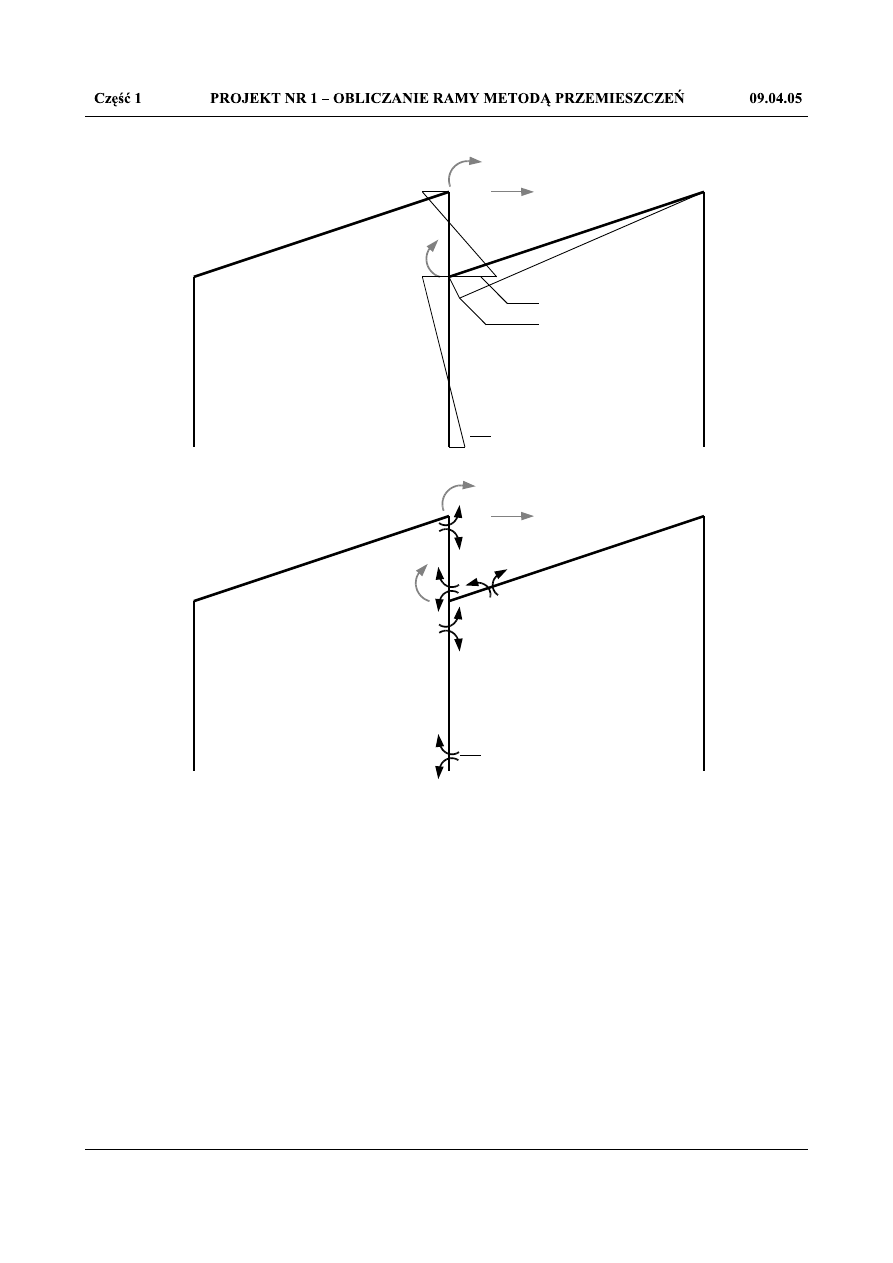
Określenie współczynników r
ik
dla drugiego i trzeciego równania kanonicznego a więc r
21
, r
22
, r
23
, R
2P ,
r
31
, r
32
,
r
33
, R
3P
z wykorzystaniem równowagi węzła 2 i 3:
r
21
=−1,5 EI
r
31
=−1,5 EI
Rys.1.14 Równowaga węzła 2 i 3 w stanie z
1
=1
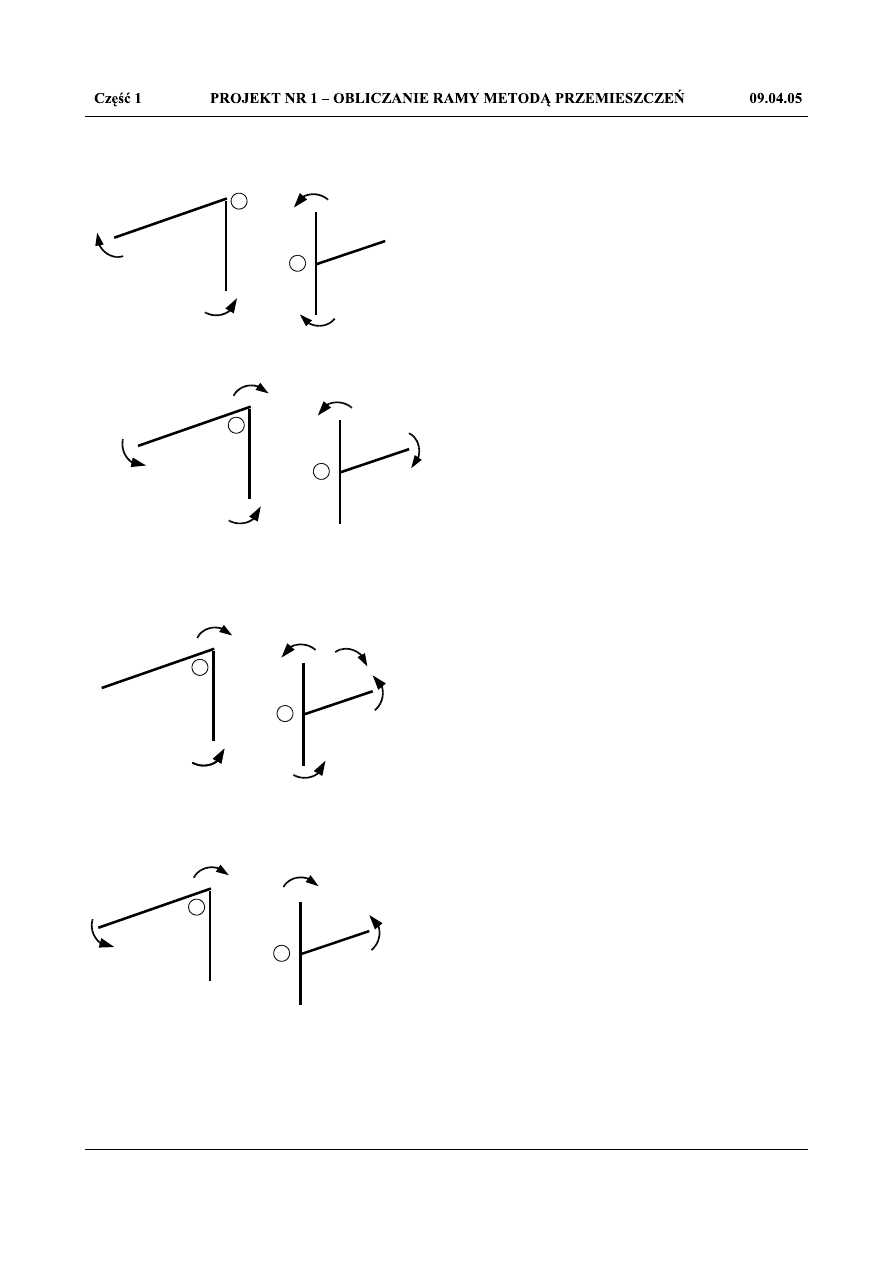
r
22
=0,6592 EI =2,659 EI
r
32
=EI
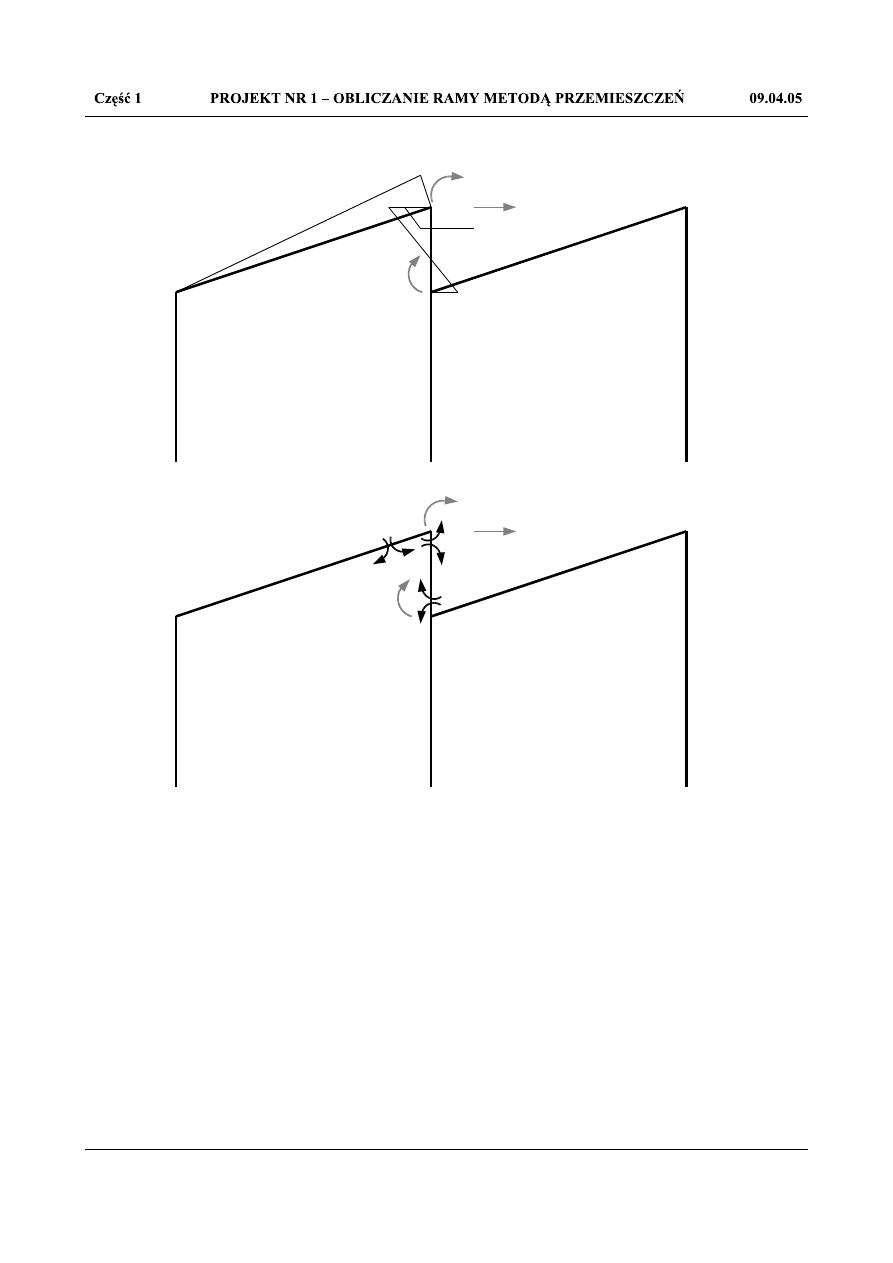
Rys.1.15 Równowaga węzła 2 i 3 w stanie z
2
=1
r
23
=EI
r
33
=3,659 EI
Rys.1.16 Równowaga węzła 2 i 3 w stanie z
3
=1
R
2 P
=27
R
3 P
=−27 [kNm]
Rys.1.17 Równowaga węzła 2 i 3 w stanie P
Tomasz Terlecki gr 3 KBI
10/18
r
21
-1,5EI
2
-1,5EI
3
r
31
r
22
2EI
2
EI
3
r
32
0,659EI
r
23
EI
2
2EI
3
r
23
EI
EI
0,659EI
R
2P
2
3
R
3P
27
-27
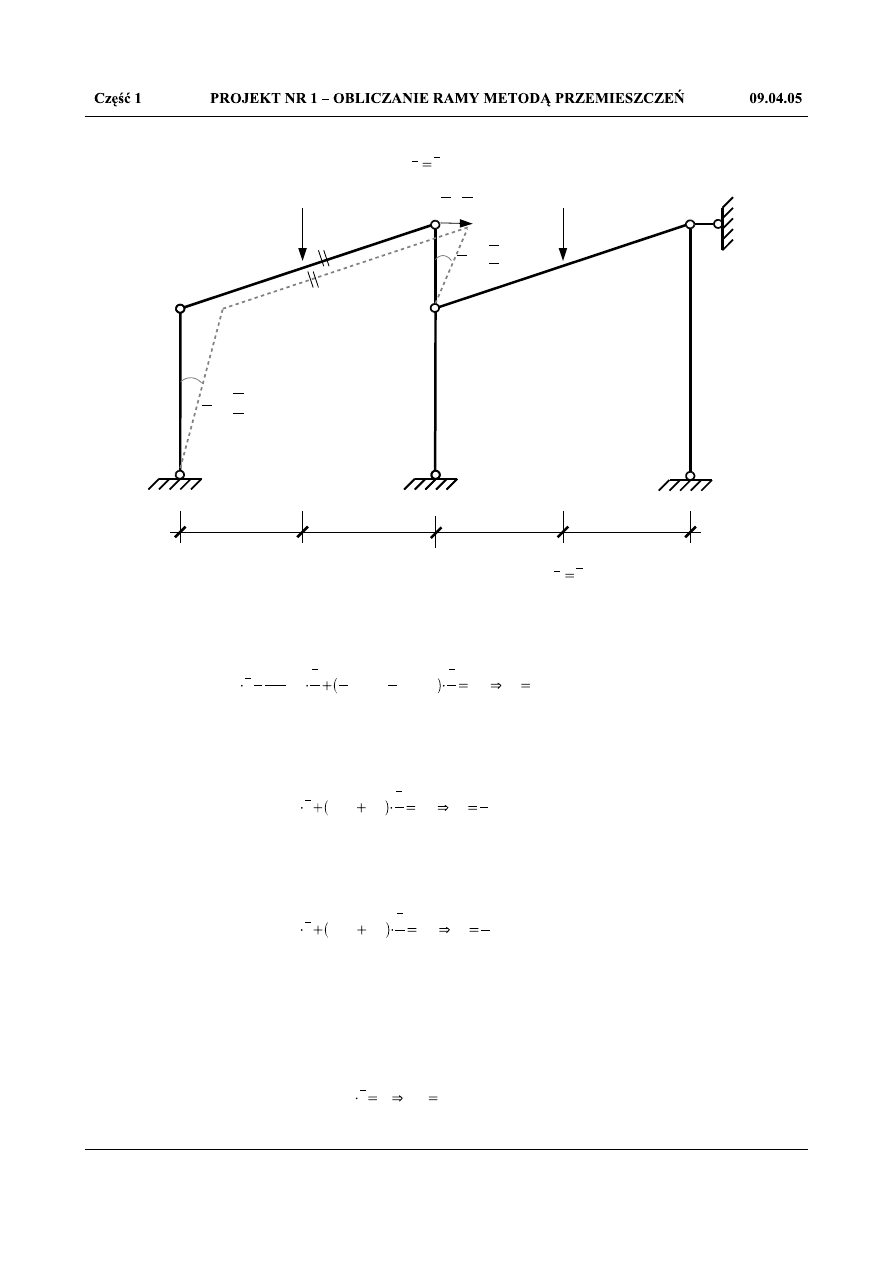
Aby obliczyć pozostałe współczynniki układu równań kanonicznych r
ik
należy skorzystać z zasady pracy
wirtualnej w wirtualnym stanie przemieszczeń
z
1
1
3
ψ
01
=
4
1
ψ
23
=
4
1
36 [kN]
36 [kN]
3
3
3
z
1
=1
Rys.1.18. Stan wirtualny przemieszczeń
z
1
1
Obliczając pracę sił w stanie rzeczywistym z
1
=1 na przemieszczeniach wirtualnych jak na rysunku 1.18
otrzymujemy:
r
11
1
3
16
EI
1
4
1,5 EI
1,5 EI
1
2
0
r
11
1,547 EI
(1.6)
Obliczając pracę sił w stanie rzeczywistym z
2
=1 na przemieszczeniach wirtualnych jak na rysunku 1.18
otrzymujemy:
r
12
1
2 EI
EI
1
2
0
r
12
1,5 EI
(1.7)
Obliczając pracę sił w stanie rzeczywistym z
3
=1 na przemieszczeniach wirtualnych jak na rysunku 1.18
otrzymujemy:
r
13
1
2 EI
EI
1
2
0
r
13
1,5 EI
(1.8)
Aby obliczyć pracę sił w stanie rzeczywistym P oprócz wirtualnych kątów obrotu prętów przedstawionych
na rysunku 1.18. musimy znać również wirtualne przemieszczenia pionowe punktów przyłożenia
wypadkowych sił rzeczywistych od obciążenia ciągłego na prętach 12 i 35. Pręt 35 nie ulega
przemieszczeniu, natomiast pręt 12 ulega wyłącznie przesunięciu równoległemu w poziomie. Obliczając
pracę sił w stanie rzeczywistym P na przemieszczeniach wirtualnych jak na rysunku 1.18 otrzymujemy:
R
1 P
1 0
R
1 P
0 [kN]
(1.9)
Tomasz Terlecki gr 3 KBI
11/18
Uwzględniając powyższe wartości współczynników r
ik
układ równań kanonicznych 1.3. przyjmie postać:
{
1,547 EI z
1
−1,5 EI z
2
−1,5 EI z
3
=0
−1,5 EI z
1
2,659 EI z
2
EI z
3
27=0
−1,5 EI z
1
EI z
2
3,659 EI z
3
−27=0
}
(1.10)
Rozwiązanie powyższego układu jest następujące:
EI z
1
=−10,6897
EI z
2
=−19,2947
EI z
3
=8,2701
(1.11)
Podstawiając wartości niewiadomych (1.11) do wzorów 1.5. otrzymam następujące wartości przęsłowych
momentów przywęzłowych:
M
01
=2,004
M
10
=0
M
12
=0
M
21
=14,287
M
23
=−14,285
M
32
=13,280
M
34
=8,270
M
43
=4,135
M
35
=−21,551
M
53
=0
M
56
=0
M
65
=0
[kNm]
(1.12)
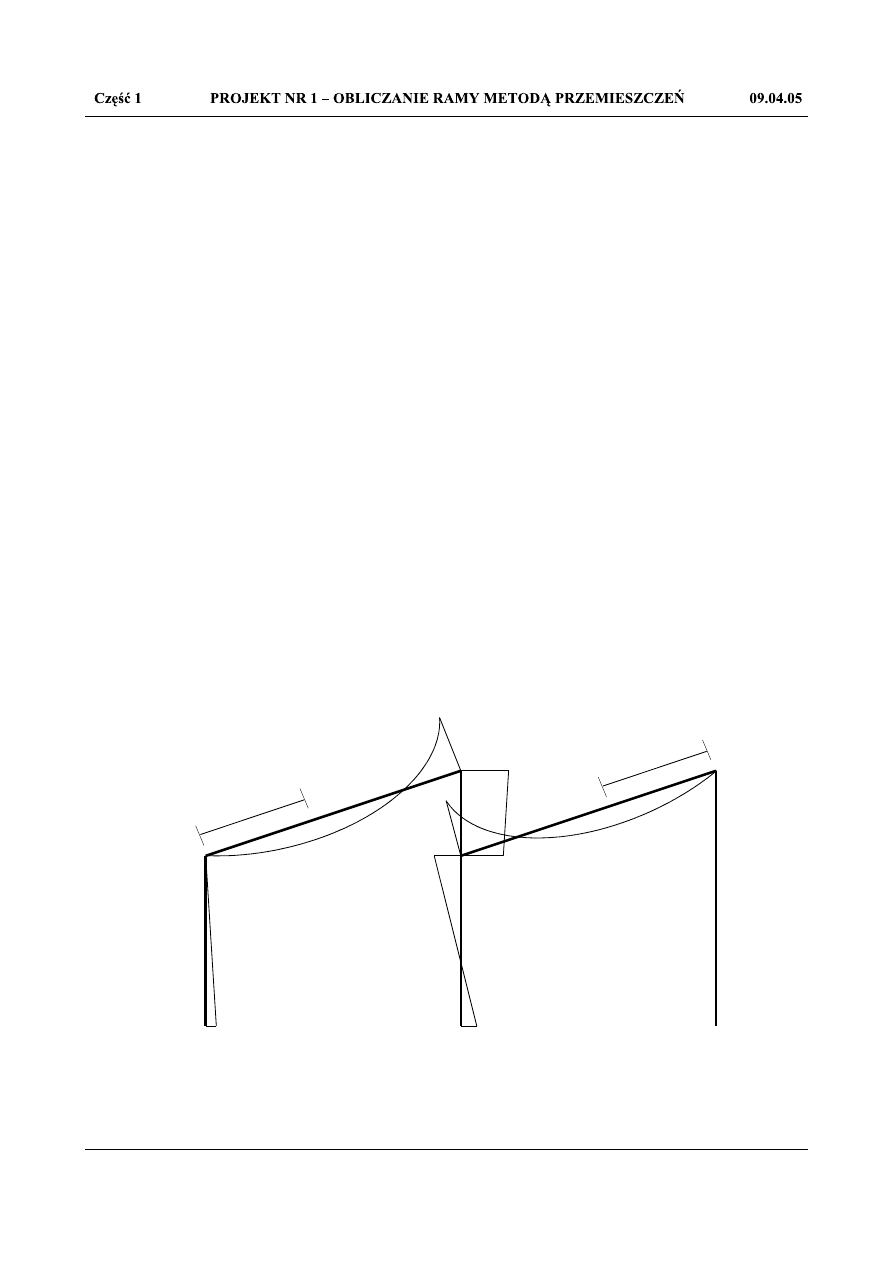
14,287
21,551
2,004
14,285
8,270
4,135
13,280
20,33
2,74
17,3
2,53
Rys.1.19. Momenty zginające w układzie statycznie niewyznaczalnym M
(n)
[kNm]
Tomasz Terlecki gr 3 KBI
12/18

Wstępną kontrolę wykonuję poprzez sprawdzenie równowagi węzła 2 i 3.
Z równowagi węzła 2 otrzymam:
∑
M =14,285−14,287=−0,002 ≈0 [ kNm]
(1.13)
Z równowagi węzła 3 otrzymam:
∑
M =21,551−13,280−8,270=0,001 ≈0 [ kNm]
(1.14)
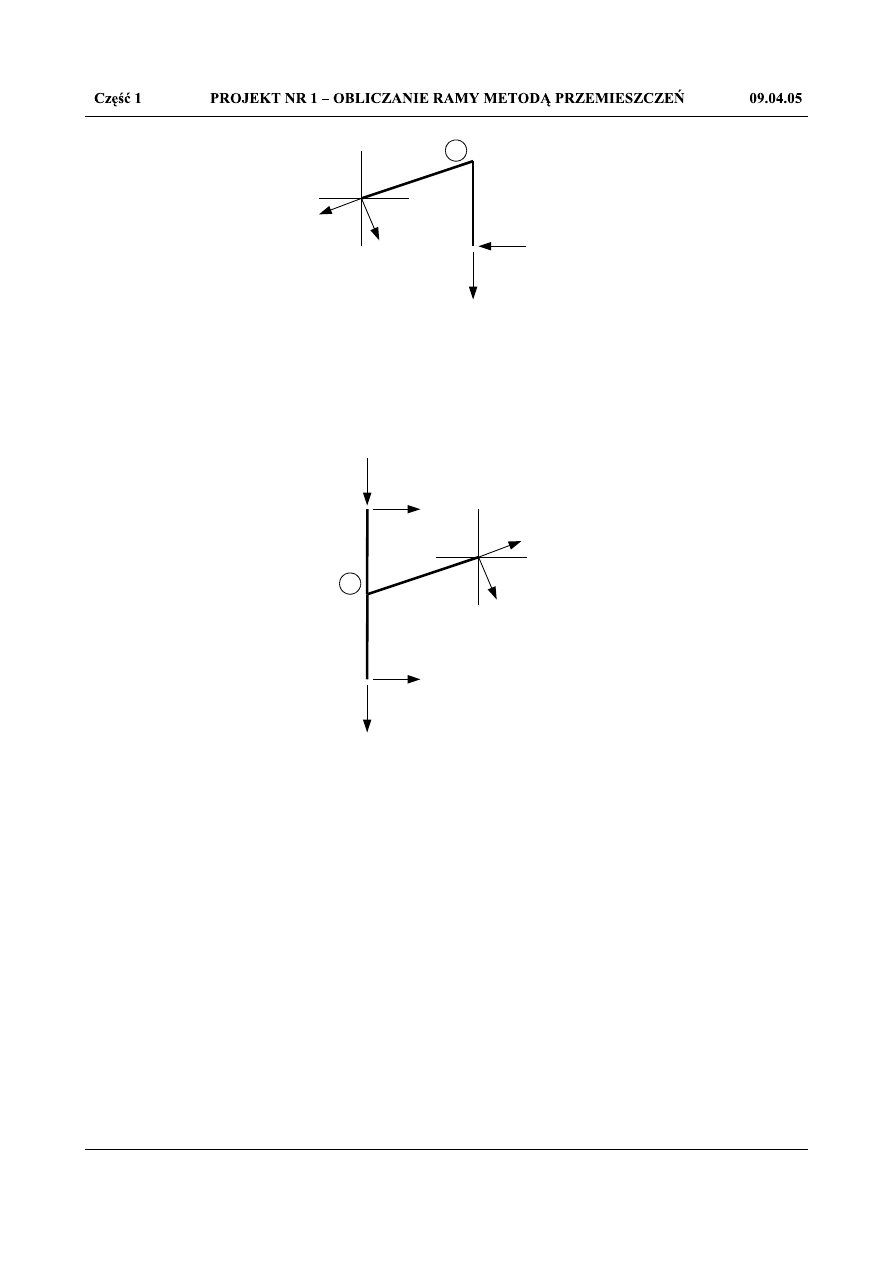
Mając określone wartości momentów zginających na każdym pręcie układu mogę obliczyć wartości sił
tnących w tych prętach
∑
M
1
=0 ⇒T
01
=T
10
=−0,501 [kN ]
Rys.1.20. Pręt 01
∑
M
1
=0 ⇒14,287T
21
⋅
406⋅6⋅3=0 ⇒ T
21
=−19,335 [kN ]
∑
M
2
=0 ⇒T
12
40−6⋅6⋅314,287=0 ⇒ T
12
=14,817 [kN ]
Rys.1.21. Pręt 12
Tomasz Terlecki gr 3 KBI
13/18
I
1
0
1
N
10
N
01
T
01
T
10
2,004
6 [kN/m]
2
6
I
2
1
2
N
21
N
12
T
12
T
21
14,287
∑
M
2
=0 ⇒13,28−14,285T
32
⋅2=0 ⇒T
32
=T
23
=0,503 [kN ]
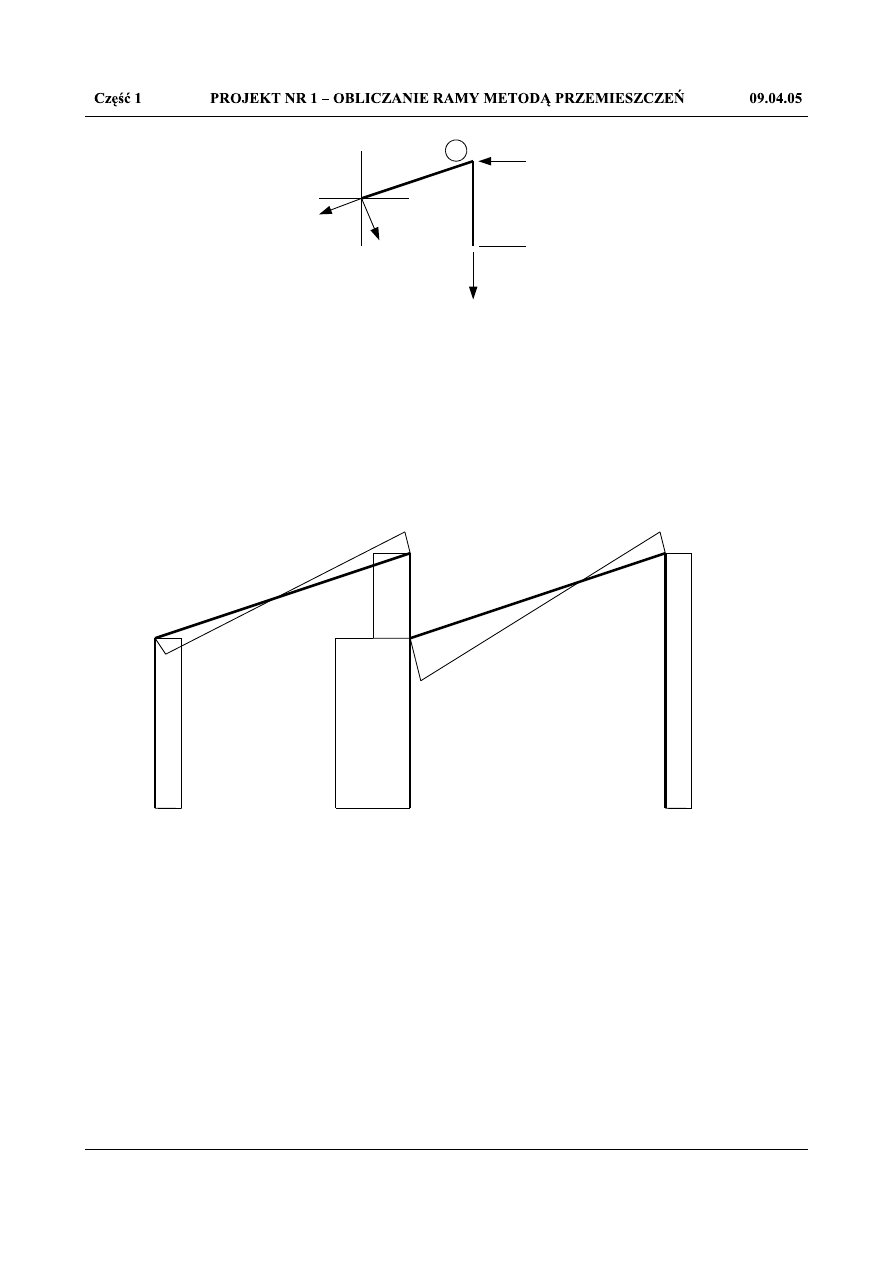
Rys.1.22. Pręt 23
∑
M
3
=0 ⇒8,274,1354 T
43
=0 ⇒T
34
=T
43
=−3,101 [kN ]
Rys.1.23. Pręt 34
∑
M
5
=0 ⇒−21,551−36⋅3T
35
⋅
40=0
T
35
=20,484 [kN ]
∑
M
3
=0 ⇒−21,55136⋅3T
53
⋅
40=0
T
53
=−13,669 [kN ]
Rys.1.24. Pręt 35
Tomasz Terlecki gr 3 KBI
14/18
N
23
N
32
T
32
T
23
13,280
2
I
1
2
3
14,285
4
I
1
3
4
N
34
N
43
T
43
T
34
4,135
8,2701
6 [kN/m]
2
6
I
2
3
5
N
53
N
35
T
35
T
53
21,551
Zestawiając otrzymane wyniki otrzymuję:
14,817
- 0,501
19,335
0,503
- 3,101
13,669
+
-
+
+20,484
-
Rys.1.25. Siły tnące w układzie statycznie niewyznaczalnym T
(n)
[kN]
Wyznaczając wartości sił normalnych występujących w zadanej ramie korzystam z równowagi węzłów.
N
12
14,817
1
α
0,501
N
10
α
Rys.1.26. Równowaga węzła 1
Mając dane:
sin
1
10
cos
3
10
(1.15)
Z równowagi węzła 1:
X
0 : 0,501 14,817 sin
N
12
cos
0
N
12
5,467 kN
Y
0 : N
01
14,817 cos
N
12
sin
0
N
01
15,785 kN
(1.16)
Tomasz Terlecki gr 3 KBI
15/18
N
21
19,335
2
α
0,503
N
23
α
Rys.1.27.Równowaga węzła 2
Z równowagi węzła 2:
∑
X =0 :− N
21
cos 19,335 sin −0,503=0 ⇒ N
21
=5,915 [kN ]
∑
Y =0 :−N
21
sin −19,335 cos = N
23
⇒ N
23
=−20,213 [kN ]
(1.17)
N
35
20,484
3
α
3,101
N
34
α
0,503
20,213
Rys.1.28.Równowaga węzła 3
Z równowagi węzła 3:
∑
X =0 : 0,503 N
35
cos 20,484 sin 3,101=0 ⇒ N
35
=−10,627 [kN ]
∑
Y =0 :−20,213 −N
34
−20,484 cos N
35
sin =0 ⇒ N
34
=−43,006 [kN ]
(1.18)
Aby wykonać równowagę węzła 5 konieczne jest określenie wartości poziomej reakcji H
5
w podporze
występującej w tym węźle. Wykorzystam w tym celu obliczone wcześniej wartości sił z tnących, bowiem
dla całego układu:
∑
X =0 : 0,5013,101−H
5
=0 ⇒ H
5
=3,602 [kN ]
(1.19)
Tomasz Terlecki gr 3 KBI
16/18
Rys.1.29.Równowaga węzła 5
Z równowagi węzła 5:
∑
X =0 : N
53
cos =13,669 sin −3,602 ⇒ N
53
=0,759 [ kN ]
∑
Y =0 :− N
53
sin −13,669 cos = N
56
⇒ N
56
=−13,208 [kN ]
(1.20)
Zestawiając otrzymane wyniki otrzymuję:
5,467
- 15,785
10,627
-
-
-
5,915
+
43,006
20,213
-
+
0,759
- 13,208
Rys.1.30. Siły normalne w układzie statycznie niewyznaczalnym N
(n)
[kN]
Tomasz Terlecki gr 3 KBI
17/18
N
53
13,669
5
α
0,0
N
56
α
3,602
Aby sprawdzić poprawność uzyskanych wyników dokonuję kontroli statycznej:
6 [kN/m]
2
4
6
6
13,208
0,0
3,602
43,006
15,785
3,101
0,501
2,004
4,135
A
Rys.1.31. Kontrola statyczna-siły działające na zadany układ
∑
X =0 : 0,5013,101−3,602=0 [ kN ]
∑
Y =0 :−7215,78543,00613,208=−1⋅10
−3
≈0 [kN ]
∑
M
A
=0 : 2,0044,13515,785⋅6−13,208 ⋅6−3,602 ⋅6=−0,011 ≈0 [kNm]
(1.21)
Tomasz Terlecki gr 3 KBI
18/18
Wyszukiwarka
Podobne podstrony:
Metoda przemieszczen- obciazenie1
Metoda przemieszczen- obciazenie3
Metoda przemieszczen obciazenie5
Metoda przemieszczen obciazeni Nieznany
Metoda przemieszczen obciazenie4
Metoda przemieszczen obciazenie3
Metoda przemieszczen obciazenie8
Metoda przemieszczen obciazenie3
Metoda przemieszczen obciazenie5
Metoda przemieszczen obciazenie2
belka obroty i przesuwy metoda przemieszczeń
Linie wpływu Metoda przemieszczeń mmp belka lw
Metoda przemieszczeń
Uproszczona metoda obliczania obciążenia cieplnego pomieszczenia
cwicz mechanika budowli metoda przemieszczen rama ugiecie
Metoda przemieszczen projekt4
więcej podobnych podstron