1. Prawo Gaussa i Stoke’sa w zastosowaniu teorii pola elektromagnetycznego (przykłady)
∫
∫
=
⋅
=
⋅
)
(V
S
V
Q
dV
dS
D
ρ
Równanie to przedstawia prawo Gaussa: Strumie
ń
elektryczny przez powierzchni
ę
zamkni
ę
t
ą
równa si
ę
ładunkowi zawartemu we wn
ę
trzu tej powierzchni. Oznacza to,
ż
e pole elektryczne
jest polem
ź
ródłowym, a
ź
ródłem pola elektrycznego jest ładunek.
Ź
ródłem linii pola elektrycznego s
ą
ładunki, przy czym linie pola zaczynaj
ą
si
ę
na ładunkach dodatnich, a ko
ń
cz
ą
na ładunkach
ujemnych. Linie pola elektrycznego maja zatem pocz
ą
tek oraz koniec i nie s
ą
liniami zamkni
ę
tymi.
Przykład:
Ładunek punktowy:
(
)
2
2
2
2
0
0
2
0
2
2
4
4
2
2
|
cos
2
sin
sin
r
Q
D
Q
D
r
r
D
r
D
d
d
r
D
a
d
d
r
a
D
S
d
D
a
D
D
r
r
r
S
r
r
r
S
r
r
r
r
π
π
π
θ
π
θ
ϕ
θ
θ
ϕ
θ
π
π
π
=
=
=
=
=
−
=
=
=
=
∫
∫ ∫
∫
Twierdzenie Stokesa
Całka liniowa wektora pola wzdłu
ż
krzywej zamkni
ę
tej równa si
ę
strumieniowi rotacji tego wektora
przez powierzchni
ę
, której brzegiem jest wspomniana krzywa:
∫
∫
⋅
=
⋅
)
( S
C
S
dS
rotA
dl
A
Twierdzenie to mo
ż
na zinterpretowa
ć
jako przekształcenie całki liniowej na całk
ę
powierzchniow
ą
. Pole wektorowe jest polem bezwirowym lub potencjalnym w obszarze, gdy rotacja
wektora jest równa zeru w ka
ż
dym punkcie tego obszary. Zgodnie z twierdzeniem Stokesa, w polu
bezwirowym całka liniowa wektora pola wzdłu
ż
dowolnej krzywej zamkni
ę
tej równa si
ę
zeru. Pole
wektorowe jest polem wirowym, gdy rotacja wektora pola jest ró
ż
na od zera w tym obszarze.
Q

2. Poda
ć
ró
ż
niczkow
ą
posta
ć
równa
ń
Maxwella i ich interpretacj
ę
.
Podstawowymi równaniami pola elektromagnetycznego s
ą
równania Maxwella; posta
ć
ró
ż
niczkowa
tych równa
ń
dotycz
ą
cych
ś
rodowisk nieruchomych:
1.
t
D
J
H
rot
∂
∂
+
=
Z równania 1. wynika,
ż
e ka
ż
dy pr
ą
d wywołuje pole magnetyczne.
Po obustronnym obliczeniu dywergencji
∂
∂
+
=
t
D
J
div
H
rot
div
otrzymujemy prawo ci
ą
gło
ś
ci wektora g
ę
sto
ś
ci pr
ą
du:
0
=
∂
∂
+
t
D
J
div
gdy
ż
divrot ka
ż
dego wektora =0. Jest to pierwsze prawo Kirchoffa w postaci wektorowej.
Pr
ą
d mo
ż
e mie
ć
ró
ż
n
ą
natur
ę
:
Gdy zjawisko przepływu pr
ą
du zachodzi w przewodniku wyst
ę
puje pr
ą
d przewodzenia
E
J
przew
γ
=
gdzie
γ
to konduktywno
ść
o
ś
rodka. Zale
ż
no
ść
ta jest wektorow
ą
postaci
ą
prawa Ohma.
W ogólnej postaci (ciała poruszaj
ą
ce si
ę
z pr
ę
dko
ś
ci
ą
V
w polu o indukcji
B
)
(
)
B
V
E
E
J
ob
przew
×
+
+
=
γ
gdzie
ob
E
to składowa nat
ęż
enia pola elektrycznego nazwana obc
ą
lub
postronn
ą
. Spowodowana ona mo
ż
e by
ć
obcymi siłami elektromotorycznymi pochodzenia
nieelektrycznego (np. w skutek nierównomiernej koncentracji ładunków)
W ka
ż
dym dielektryku wyst
ę
puje pr
ą
d przesuni
ę
cia wywołany zmiennym polem elektrycznym:
t
P
t
E
E
t
t
D
J
o
przes
∂
∂
+
∂
∂
=
∂
∂
=
∂
∂
=
ε
ε
gdzie
P
E
D
o
+
=
ε
,
P
- wektor polaryzacji cz
ą
stek dielektryka. Pr
ą
d
przesuni
ę
cia płynie tylko pod wpływem zmiennego w czasie pola elektrycznego. Składnika
t
E
o
∂
∂
ε
jest
zwi
ą
zany ze zmian
ą
wektora indukcji pola elektrycznego w pró
ż
ni, a składnik
t
P
∂
∂
ze zmian
ą
polaryzacji cz
ą
stek.
W przestrzeni zawieraj
ą
cej ładunki swobodne płynie pr
ą
d konwekcji
v
J
kon
ρ
=
gdzie
ρ
-g
ę
sto
ść
obj
ę
to
ś
ciowa ładunku poruszaj
ą
cego si
ę
z pr
ę
dko
ś
ci
ą
v
.
Podsumowanie:
Na podstawie I równania Maxwella stwierdzamy,
ż
e pr
ą
d elektryczny (niezale
ż
nie od
ś
rodowiska i
sposobu powstania) jest to takie zjawisko, któremu towarzyszy pole magnetyczne.
2.
t
B
E
rot
∂
∂
−
=
Z równania 2. wynika,
ż
e zmiennemu polu magnetycznemu towarzyszy pole elektryczne.
Znak minus wyra
ż
a reguł
ę
bezwładno
ś
ci elektromagnetycznej Lenza: W obwodach elektrycznych
istnieje tendencja do zachowania w stanie niezmiennym strumieni skojarzonych z tymi obwodami.
Przy wszelkiej próbie zmiany strumienia w obwodach powstaj
ą
siły elektromagnetyczne działaj
ą
ce w
kierunku przeciwstawienia si
ę
tym zmianom.
3.
0
=
B
div
Równanie 3. opisuje ci
ą
gło
ść
wektora indukcji
B
. Wynika z niego,
ż
e nie istniej
ą
oddzielnie ładunki
magnetyczne, a jedynie dipole. Oznacza to,
ż
e pole magnetyczne jest polem bez
ź
ródłowym, a linie
pola magnetycznego s
ą
liniami zamkni
ę
tymi.
je
ż
eli b
ę
dziemy operowa
ć
strumieniem magnetycznym zamkni
ę
tej powierzchni to otrzymamy
równanie
Ф
=0
4.
ρ
=
D
div
Z równania 4. wynika,
ż
e w obszarach zawieraj
ą
cych ładunek wektor indukcji elektrycznej jest
nieci
ą
gły. Linie wektora
ρ
zaczynaj
ą
si
ę
na ładunkach dodatnich (
ź
ródłach) i ko
ń
cz
ą
na ładunkach
ujemnych (odbiornikach). Linie pola elektrycznego nie s
ą
liniami zamkni
ę
tymi.
3. Poda
ć
całkow
ą
posta
ć
równa
ń
Maxwella i ich interpretacj
ę
1.
∫
∫
∫
⋅
∂
∂
+
⋅
=
⋅
S
S
C
S
dS
D
t
dS
J
dl
H
)
(
I równanie Maxwella w postaci całkowej jest znane pod nazw
ą
prawa Amper’a. Interpretacja:
Napi
ę
cie magnetyczne wzdłu
ż
krzywej zamkni
ę
tej jest równe pr
ą
dowi całkowitemu, czyli sumie pr
ą
du
przewodzenia i pr
ą
du przesuni
ę
cia przez powierzchni
ę
, której brzegiem jest ta krzywa.
2.
∫
∫
⋅
∂
∂
−
=
⋅
S
S
C
dS
B
t
dl
E
)
(
II równanie Maxwella w postaci całkowej przedstawia prawo indukcji elektromagnetycznej Faradaya:
Napi
ę
cie wzdłu
ż
krzywej zamkni
ę
tej jest równe sile elektromotorycznej wzniecanej wskutek
zmian czasowych strumienia magnetycznego przenikaj
ą
cego powierzchni
ę
, której brzegiem
jest ta krzywa.
3.
∫
∫
⋅
=
⋅
)
(V
S
V
dV
dS
D
ρ
Równanie to przedstawia prawo Gaussa: Strumie
ń
elektryczny przez powierzchni
ę
zamkni
ę
t
ą
równa si
ę
ładunkowi zawartemu we wn
ę
trzu tej powierzchni. Oznacza to,
ż
e pole elektryczne
jest polem
ź
ródłowym, a
ź
ródłem pola elektrycznego jest ładunek.
Ź
ródłem linii pola elektrycznego s
ą
ładunki, przy czym linie pola zaczynaj
ą
si
ę
na ładunkach dodatnich, a ko
ń
cz
ą
na ładunkach
ujemnych. Linie pola elektrycznego maja zatem pocz
ą
tek oraz koniec i nie s
ą
liniami zamkni
ę
tymi.
4.
0
)
(
=
⋅
∫
dS
B
V
S
Na podstawie tego wzoru stwierdzamy,
ż
e strumie
ń
magnetyczny przez dowoln
ą
powierzchni
ę
zamkni
ę
t
ą
równa si
ę
zeru. Oznacza to,
ż
e pole magnetyczne jest polem bez
ź
ródłowym, a linie
pola magnetycznego s
ą
liniami zamkni
ę
tymi.
4. Warunki graniczne : opis, rodzaje, interpretacja
Warunki graniczne pozwalaj
ą
na jednoznaczne rozwi
ą
zanie problemu, stawiane naszej funkcji np.
V(P) lub jej pochodnej na brzegu obszaru
Ω
( w którym ta funkcja jest okre
ś
lona, zadana ) w danej
chwili czasu.
Szczególne przypadki warunków brzegowych :
a) warunki pocz
ą
tkowe - warunki stawiane poszukiwanej funkcji V(P) w obszarze
Ω
dla t=t
0
b) warunki brzegowe - warunki stawiane poszukiwanej funkcji V(P) na brzegu S obszaru
Ω
Istnienie jedynej funkcji holomorficznej V(P) spełniaj
ą
cej dowolne równanie ró
ż
niczkowe cz
ą
stkowe II
rz
ę
du dowodzi si
ę
za pomoc
ą
tw. Cauchy’ego.
1 Zagadnienie brzegowe pierwszego rodzaju - zagadnienie Dirichleta
V(P) =
Ψ
(P) dla P
∈
S gdzie V(P) - szukana funkcja
lub V(P,t) =
Ψ
(P,t)
Jest zadana funkcja
Ψ
(P),
Ψ
(P,t) w punktach P na brzegu S obszaru
Ω
w których jest poszukiwane
rozwi
ą
zanie r.r.
Zastosowanie : Warunki graniczne na zewn
ą
trz solenoidu ( np. B=0 )
2 Zagadnienie brzegowe drugiego rodzaju - zagadnienie Neumanna
=>
)
P
(
n
V
)
P
(
)
t
V(P,
0
t
0
Φ
=
∂
∂
Ψ
=

Zadana jest funkcja pochodna
Φ
(P) lub
Φ
(P,t) w punktach P na brzegu S obszaru
Ω
w których jest
poszukiwanie rozwi
ą
zania r.r. Jest ona pochodn
ą
normaln
ą
funkcji V(P) w punktach P na brzegu S
obszaru
Ω
.
Zastosowanie : warunki graniczne wewn
ą
trz solenoidu (dB/dn=const lub An+C)
3 Zagadnienie brzegowe trzeciego rodzaju - zagadnienie Henkela ( tylko wspomniane )
W szczególnym przypadku, gdy zadane na brzegu funkcje s
ą
równe 0, wyst
ę
puj
ą
jednorodne
warunki brzegowe. Na granicy o
ś
rodków nale
ż
y uwzgl
ę
dni
ć
warunki ci
ą
gło
ś
ci skalarów i wektorów.
5. Metody numeryczne rozwi
ą
zywania problemów brzegowych w zagadnieniach polowych :
podstawy, krótki opis
Dostajemy gotowe zale
ż
no
ś
ci w postaci wykresów lub tabel, s
ą
to rozwi
ą
zania przybli
ż
one.
1. Metoda ró
ż
nic sko
ń
czonych
Równania ró
ż
niczkowe zast
ę
pujemy równaniami ró
ż
nicowymi. Zagadnienie brzegowe sprowadza si
ę
do układu liniowych równa
ń
algebraicznych, a po ich rozwi
ą
zaniu otrzymuje si
ę
przybli
ż
one
rozwi
ą
zanie problemu.
Tworzymy siatk
ę
, któr
ą
pokrywamy cały obszar. Liczymy potencjały w ka
ż
dym w
ęź
le siatki
(rozwijaj
ą
c funkcj
ę
potencjału w szereg Taylora mo
ż
emy wyznaczy
ć
V
i,j
zale
ż
ne od potencjałów
s
ą
siednich w
ę
złów, gdy przyjmiemy równomiern
ą
siatk
ę
to
V
i,j
=[-f
0
h
2
+V
i-1,j
+V
i+1,j
+V
i,j-1
+V
i,j+1
]/4 ). Równanie mo
ż
na napisa
ć
dla ka
ż
dego w
ę
zła wewn
ę
trznego,
przy czym warto
ś
ci funkcji V w w
ę
złach poło
ż
onych na granicy obszary zast
ę
puje si
ę
przez warto
ś
ci
wynikaj
ą
ce z warunku brzegowego. W rezultacie otrzymuje si
ę
ukł. rów. algebraicznych, które po
rozwi
ą
zaniu daj
ą
warto
ś
ci funkcji V w w
ę
złach wewn
ę
trznych.
Mamy dwie metody rozwi
ą
zywania :
a) metoda macierzowa - [K][V]=[B] obliczmy [V] odwracaj
ą
c macierz [K] (
ż
mudna robota) przy czym
w macierzy [B] siedz
ą
warunki graniczne
b) metoda relaksacyjna - (iteracyjna) polega na obliczaniu kolejnych potencjałów siatki w p
ę
tli (
numerycznie ) dopóki zadana warto
ść
bł
ę
du
∆
>max d
i,j
gdzie d
i,j
=V
i,j
k
-V
i,j
k-1
( k - nr iteracji ).
Dokładno
ść
metody polega na odpowiednim ustaleniu bł
ę
du ( jak najmniejszy ). W zale
ż
no
ś
ci czy
bierzemy pod uwag
ę
nowe warto
ś
ci w tej samej iteracji rozró
ż
niamy metod
ę
Jacobiego i Gaussa-
Siedla. MRS jest prosta pod wzgl
ę
dem matematycznym, łatwa w u
ż
yciu i charakteryzuj
ę
si
ę
du
żą
ogólno
ś
ci
ą
. Jej wad
ą
jest stosunkowo mała dokładno
ść
i trudno
ść
w oszacowaniu bł
ę
du.
2. Metoda elementów sko
ń
czonych
MES znajduje zastosowanie przy rozwi
ą
zywaniu zagadnie
ń
brzegowych dla równa
ń
typu
eliptycznego sprowadzaj
ą
c problem do ukł. rów. algebraicznych, z których po rozwi
ą
zaniu
otrzymujemy rozwi
ą
zanie przybli
ż
one. Metoda ta pozwala znale
źć
równie
ż
przybli
ż
one rozwi
ą
zanie
r.r. cz. typu parabolicznego sprowadzaj
ą
c problem do ukł. rów. ró
ż
niczkowych zwyczajnych I rz
ę
du.
MES powi
ą
zana jest z metodami wariacyjnymi, mo
ż
na bowiem otrzyma
ć
równania dla rozwi
ą
zania
przybli
ż
onego w drodze minimalizacji funkcjonału. Obszar dzielimy na elementy, ich wielko
ść
nale
ż
y
dopasowa
ć
do kształtu obszaru jest to tak zwana dyskretyzacja obszaru S ( cz
ą
stkowe obszary s
ą
zwane elementami ). Nast
ę
pnie dobieramy funkcj
ę
, która opisuje potencjał w jednym punkcie ( w
jednym elemencie naszego obszaru ). Kolejnym etapem jest utworzenie globalnego układu równa
ń
,
który obejmuje cały obszar. Ostatni
ą
czynno
ś
ci
ą
jest rozwi
ą
zanie tego układu równa
ń
.
)
t
,
P
(
n
)
t
,
P
(
V
S
P
dla
)
P
(
n
)
P
(
V
P
P
Φ
=
∂
∂
∈
Φ
=
∂
∂

6. Metoda ró
ż
nic sko
ń
czonych - zało
ż
enia, wyprowadzenie podstawowych zale
ż
no
ś
ci dla
równania Poissone’a
Rozwijamy w szereg Taylora potencjały s
ą
siednich w
ę
złów w stosunku do V
i,j
Równanie mo
ż
na napisa
ć
dla ka
ż
dego w
ę
zła wewn
ę
trznego, przy czym warto
ś
ci funkcji V w w
ę
złach
poło
ż
onych na granicy obszary zast
ę
puje si
ę
przez warto
ś
ci wynikaj
ą
ce z warunku brzegowego. W
rezultacie otrzymuje si
ę
ukł. rów. algebraicznych, które po rozwi
ą
zaniu daj
ą
warto
ś
ci funkcji V w
w
ę
złach wewn
ę
trznych.
Mamy dwie metody rozwi
ą
zywania :
a) metoda macierzowa - [K][V]=[B] obliczmy [V] odwracaj
ą
c macierz [K] (
ż
mudna robota) przy czym
w macierzy [B] siedz
ą
warunki graniczne
b) metoda relaksacyjna - (iteracyjna) polega na obliczaniu kolejnych potencjałów siatki w p
ę
tli (
numerycznie ) dopóki zadana warto
ść
bł
ę
du
∆
>max d
i,j
gdzie d
i,j
=V
i,j
k
-V
i,j
k-1
( k - nr iteracji ).
Dokładno
ść
metody polega na odpowiednim ustaleniu bł
ę
du ( jak najmniejszy ). W zale
ż
no
ś
ci czy
bierzemy pod uwag
ę
nowe warto
ś
ci w tej samej iteracji rozró
ż
niamy metod
ę
Jacobiego i Gaussa-
Siedla. MRS jest prosta pod wzgl
ę
dem matematycznym, łatwa w u
ż
yciu i charakteryzuj
ę
si
ę
du
żą
ogólno
ś
ci
ą
. Jej wad
ą
jest stosunkowo mała dokładno
ść
i trudno
ść
w oszacowaniu bł
ę
du.
2
2
1
i
1
i
1
i
1
i
1
i
1
i
1
i
1
i
1
i
1
i
1
i
1
i
1
i
1
i
j
,
1
i
2
1
i
2
1
i
j
,
1
i
3
1
i
3
3
2
1
i
2
2
1
i
1
i
j
,
1
i
3
1
i
3
3
2
1
i
2
2
1
i
1
i
j
,
1
i
y
)
j
,
i
(
V
oraz
y
)
j
,
i
(
V
dla
icznie
log
ana
)
j
,
i
(
V
h
h
h
h
V
)
h
h
(
h
h
V
)
h
h
(
h
h
x
)
j
,
i
(
V
V
h
h
V
...
h
)
x
)
j
,
i
(
V
(
6
1
h
)
x
)
j
,
i
(
V
(
2
1
h
)
X
)
j
,
i
(
V
(
)
j
,
i
(
V
)
h
0
(
V
V
...
h
)
x
)
j
,
i
(
V
(
6
1
h
)
x
)
j
,
i
(
V
(
2
1
h
)
X
)
j
,
i
(
V
(
)
j
,
i
(
V
)
h
0
(
V
V
∂
∂
∂
∂
−
+
+
−
+
=
∂
∂
⇒
−
+
∂
∂
−
∂
∂
+
∂
∂
−
=
+
=
+
∂
∂
+
∂
∂
+
∂
∂
+
=
+
=
+
−
−
+
−
−
+
−
+
+
−
+
+
−
−
−
+
+
−
−
−
−
−
+
+
+
+
+
4
V
V
V
V
h
f
)
j
,
i
(
V
h
h
h
gdy
)
h
h
(
2
h
)
V
V
(
h
)
V
V
(
h
h
f
)
j
,
i
(
V
y
otrzymujem
f
y
V
x
V
:
a
'
Poissone
rownania
dla
to
h
h
h
oraz
h
h
h
gdy
)
j
,
i
(
V
h
h
2
V
)
h
h
(
h
2
V
h
h
h
2
x
)
j
,
i
(
V
V
h
h
V
1
j
,
i
1
j
,
i
j
,
1
i
j
,
1
i
2
0
j
i
2
j
2
i
i
1
j
,
i
1
j
,
i
j
j
,
1
i
j
,
1
i
2
j
2
i
0
0
2
2
2
2
1
j
1
ji
j
1
i
1
i
i
1
i
1
i
1
i
1
i
1
i
1
i
1
i
1
i
1
i
2
1
i
2
2
1
i
1
i
1
i
1
i
−
+
−
+
−
+
−
+
+
−
+
−
−
+
−
−
+
−
+
−
+
+
−
−
+
+
+
+
+
+
−
=
=
=
+
+
+
+
+
−
=
=
∂
∂
+
∂
∂
=
=
=
=
−
+
+
+
=
∂
∂
⇒
+

7. Opisa
ć
metode ró
ż
nic sko
ń
czonych w zastosowaniu do obliczania pola wokół obiektu o
zadanym potencjale
W metodzie tej zagadnienie brzegowe sprowadza sie do ukladu liniowych rowna
ń
matematycznych,a po ich rozwi
ą
zaniu otrzymuje si
ę
przybli
ż
one rozwi
ą
zanie zagadnienia.
Załózmy
ż
e zagadnienie brzegowe jest okreslone w obszarze plaskim.Rysujemy siatk
ę
której kształt zale
ż
y od układu współrzednych.W przypadku układu prostok
ą
tnego przyjmujemy
siatke regularn
ą
o skoku = h.W
ę
zły siatki sa równe Xi = X0 + ih Yj = Y0 +jh
Brzeg obszaru aproksymuje si
ę
lini
ą
łaman
ą
przechodz
ą
c
ą
przez w
ę
zły siatki.
Potencjał w punkcie Xi Yj obliczamy wg nast
ę
puj
ą
cego równania:
1/4 V(Xi,Yj) –V(Xi-1,Yj-1)- V(Xi+1,Yj-1)- V(Xi-1,Yj+1)- V(Xi+1,Yj+1)=0
Po obliczeniu potencjałów dla wszystkich punktów obszaru cał
ą
operacje powtarzamy od pocz
ą
tku
dopóki w kolejnej iteracji ró
ż
nica mi
ę
dzy poprzednim a aktualnym potencjałem b
ę
dzie
znikoma....
8. Podział o
ś
rodkow materialnych,opis i scharakteryzowa
ć
własno
ś
ci.
Wyró
ż
nia si
ę
nast
ę
pujace o
ś
rodki materialne:
- Jednorodny: ma on takie same własno
ś
ci fizyczne w ka
ż
dym punkcie.
- Izotropowy: ma takie same własno
ś
ci fizyczne w trzech kierunkach przestrzeni.
- Liniowy:stałe fizyczne charakteryzuj
ą
ce ten o
ś
rodek nie zale
ż
a ani od nat
ęż
enia
pola elektrycznego ani od nat
ęż
enia pola magnetycznego(stłe te to przenikalno
ść
magnetyczna,elektryczna i konduktywno
ść
).
- Przewodz
ą
cy: wyst
ę
puje zjawisko przewodzenia pr
ą
du elektrycznego jako
uporz
ą
dkowanego ruchu ładunków elektrycznych pow wpływem działania
pola elektrycznego.(J =
γ
E)
- Nieprzewodz
ą
cy(dielektryk): brak zjawiska przewodzenia,wektory D i E s
ą
proporcjonalne(D =
ε
E)
- Bianizotropowy: wktor indukcji D zale
ż
y od nat
ęż
enia pola elektrycznego i
magnetycznego (D =
ε
E +
ε
H)
- Diamagnetyczny: przenikalno
ś
c magnetyczna
µ
=const.<1 i jest to linia
Przechodz
ą
ca przez
ś
rodek układu wsp.(B=
µ
H )
- Paramagnetyczny:j.w.
µ
>1
- Ferromagnetyczny: przenikalno
ść
µ
zale
ż
y od nate
ż
enia pola magnetycznego(
µ
=
µ
(H)).
Jest to o
ś
rodek nieliniowy,wyst
ę
puje zjawisko histerezy.
9. Opisa
ć
natur
ę
pr
ą
du przewodzenia,przesuni
ę
cia i konwekcji.
Pr
ą
d przewodzenia jest utworzony przez poruszajace sie ładunki pod wpływem
działania pola elektrycznego
W metalach tworzy go strumie
ń
elektronów ,charakteryzuje go gesto
ść
J=dI/dS przy dS---0
Pr
ą
dem przesuni
ę
cia nazywa sie wystepuj
ą
cy w całkowej postaci równa
ń
Maxwella
człon
Jednostk
ą
jest amper.Stanowi on przedłu
ż
enie przepływu pr
ą
du np.miedzy okladkami
kondensatora gdzie nie wyst
ę
puje pr
ą
d przewodzenia.W ten sposób realizuje sie
przepływ pr
ą
du wzdlu
ż
drogi zamkni
ę
tej.Przybiera on znaczne rozmiary przy bardzo
szybkich zmiana czasowych pola elektromagnetycznego
Pr
ą
d konwekcji wyst
ę
puje wówczas gdy ruch elektryczno
ś
ci odbywa sie w wyniku
ruchu materii obdarzonej ładunkiem .Jego g
ę
sto
ść
J =
γ
V, gdzi
γ
to przestrzenna
gesto
ść
ładunku, a V-pr
ę
dko
ść
unoszenia.
t
S
Dd
d
d

10. Poda
ć
i zinterpretowa
ć
równania Poissone’a i Laplace’a. Poda
ć
przykłady wykorzystania
tych równa
ń
.
Pole trójwymiarowe:
ε
=const
Podstawiaj
ą
c do wzoru:
ρ
=
D
div
r
otrzymujemy
ε
ρ
=
E
div
a po podstawieniu
gradV
E
−
=
r
mamy:
ε
ρ
−
=
divgradV
czyli
ε
ρ
−
=
∇
V
2
(równanie Poissona).
gdzie
2
∇
jest laplasjanem.
Je
ż
eli w pewnym obszarze pola elektrostatycznego nie ma ładunku (
ρ
=0) w punktach tego
obszaru potencjał spełnia równanie Laplace’a
0
V
2
=
∇
Wyznaczenie potencjału w polu elektrostatycznym sprowadza si
ę
do rozwi
ą
zania równania
Poissona lub Laplace’a, przy spełnieniu okre
ś
lonych warunków brzegowych, czyli do rozwi
ą
zania
zagadnienia brzegowego.
∫
=
V
d
d
r
'
'
'
'
'
'
z
y
dx
)
z
,
y
,
x
(
4
1
z)
y,
V(x,
ρ
πε
gdzie:
2
'
2
'
2
'
)
z
-
(z
)
y
-
(y
)
x
-
(x
r
+
+
=
spełnia równanie Poissona w punktach obszaru V, którym
istnieje ładunek przestrzenny o g
ę
sto
ś
ci
ρ
, a równanie Laplace’a – na zewn
ą
trz tego obszaru, gdzie
nie ma ładunku przestrzennego. Z tego powodu powy
ż
sze wyra
ż
enie nazywa si
ę
rozwi
ą
zaniem
podstawowym równa
ń
Poissona i Laplace’a.
Pole dwuwymiarowe:
W obszarze ograniczonym powierzchni
ą
walcow
ą
o tworz
ą
cych równoległych do osi z ukł
ą
du
współrz
ę
dnych prostok
ą
tnych znajduje si
ę
ładunek przestrzenny o g
ę
sto
ś
ci
ρ
, która nie zale
ż
y od
współrz
ę
dnej z. Przy zało
ż
eniu,
ż
e długo
ść
w kierunku osi z jest niesko
ń
czenie du
ż
a, rozpatrywane
pole nie zale
ż
y od współrz
ę
dnej z i jest takie samo w ka
ż
dej płaszczy
ź
nie prostopadłej do osi z.
Otrzymujemy w tym przypadku pole dwuwymiarowe, zale
ż
ne tylko od współrz
ę
dnych x, y, nazywane
cz
ę
sto polem płaskim. We wn
ę
trzu obszaru, gdzie znajduje si
ę
ładunek przestrzenny, potencjał
spełnia dwuwymiarowe równanie Poissona:
ε
δ
δ
δ
δ
δ
−
=
+
2
2
2
2
y
V
x
V
a na zewn
ą
trz tego obszaru – dwuwymiarowe równanie Laplace’a:
0
y
V
x
V
2
2
2
2
=
+
δ
δ
δ
δ
11. Poda
ć
i zinterpretowa
ć
prawo Jule’a–Lenza w postaci ró
ż
niczkowej.
Przy przepływie pr
ą
du w
ś
rodowisku przewodz
ą
cym wyst
ę
puje zjawisko przekształcania si
ę
energii elektrycznej w ciepło. Zjawisko to ma charakter przestrzenny i zachodzi w całym obszarze
pola przepływowego. Niech
P
∆
oznacza moc przekształcan
ą
w ciepło w obszarze
V
∆
pola
przepływowego. Wielko
ść
:
V
P
p
lim
0
V
∆
∆
=
→
∆
(*)
nazywa si
ę
g
ę
sto
ś
ci
ą
obj
ę
to
ś
ciow
ą
mocy przetwarzanej na ciepło.
Rozpatrzmy odcinek rurki pola przepływowego mi
ę
dzy dwiema powierzchniami ekwipotencjalnymi
ϕ
oraz
ϕ
+d
ϕ
. Niech dS oraz dn oznaczaj
ą
odpowiednio pole poprzecznego przekroju oraz długo
ść
rozpatrywanego odcinka rurki, a du – napi
ę
cie wzdłu
ż
tego odcinka. Pr
ą
d płyn
ą
cy w rurce wyra
ż
a si
ę
wzorem: di=JdS zgodnie z prawem J-L, moc przetwarzana na ciepło w odcinku rurki jest równa:
dP=R(di)
2
, =>

gdzie rezystancja odcinka rurki wynosi:
dS
dn
R
γ
=
γ
- konduktywano
ść
ś
rodowiska
Po wykonaniu elementarnych przekształce
ń
otrzymujemy:
dV
J
R
2
γ
=
, gdzie
dV=dSdn – obj
ę
to
ść
odcinka rurki
Zgodnie ze wzorem (*) g
ę
sto
ść
obj
ę
to
ś
ciowa mocy wynosi:
γ
2
J
p
=
lub
J
E
E
p
2
⋅
=
⋅
=
γ
12. Poda
ć
definicj
ę
i opisa
ć
poj
ę
cie: „Dywergencja pola wektorowego” dla wybranego układu
współrz
ę
dnych.
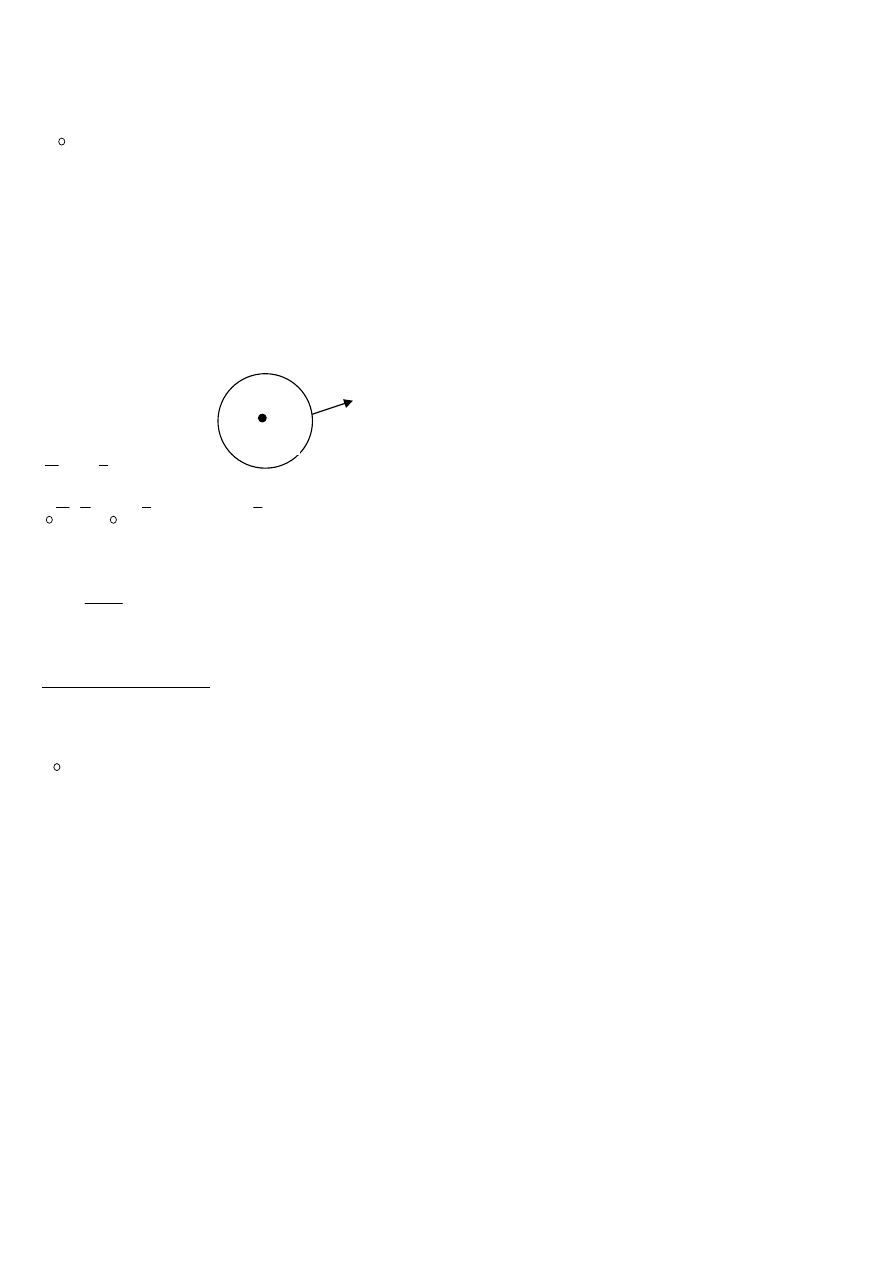
W obszarze V okre
ś
lone jest pole wektorowe, a wektor
z)
y,
(x,
A
r
jest funkcj
ą
ró
ż
niczkowaln
ą
w
tym obszarze. Niech S oznacza powierzchnie w rozpatrywanym obszarze. Element dS tej
powierzchni przedstawiamy w postaci wektora
S
d
r
normalnego wzgl
ę
dem tego elementu. Warto
ś
ci
ą
(miar
ą
) wektora
S
d
r
jest pole powierzchni elementu dS.
Wielko
ść
:
S
d
A
dS
Acos
dS
A
n
r
r
⋅
=
=
α
przedstawia strumie
ń
elementarny wektora
A
r
przez powierzchnie
dS. Strumie
ń
wektora
A
r
przez powierzchnie S nazywamy całk
ą
powierzchniow
ą
S
d
A
S
r
r
⋅
∫
. Strumie
ń
wektora przez powierzchni
ę
jest skalarem. Strumie
ń
wektora
A
r
przez powierzchni
ę
zamkni
ę
t
ą
S
przedstawiamy w postaci
∫
⋅
S
S
d
A
r
r
.
Zakładamy przy tym,
ż
e wektor
S
d
r
ma zwrot normalnej zewn
ę
trznej. Strumie
ń
wektora wypływaj
ą
cy
na zewn
ą
trz przez brzeg obszaru jest dodatni, a strumie
ń
wpływaj
ą
cy ujemny.
Dywergencj
ą
lub rozbie
ż
no
ś
ci
ą
div
A
r
wektora
A
r
nazywamy granic
ę
, do której d
ąż
y strumie
ń
wektora
A
r
przez powierzchnie zamkni
ę
t
ą
S, b
ę
d
ą
c
ą
brzegiem obszary
V
∆
, podzielony przez obj
ę
to
ść
tego
obszaru, gdy ta obj
ę
to
ść
d
ąż
y do zera, czyli dywergencja jest wielko
ś
ci
ą
skalarn
ą
.
V
S
d
A
A
div
lim
0
V
∆
⋅
=
∫
→
∆
S
r
r
r
Dywergencja jest operacj
ą
przekształcaj
ą
c
ą
wektor
A
r
pola na wielko
ść
skalarn
ą
div
A
r
. Okre
ś
lenie
dywergencji nie zale
ż
y od przyj
ę
tego układu współrz
ę
dnych, jednak
ż
e posta
ć
wzoru dla div
A
r
zale
ż
y
od rodzaju układu.
współrz
ę
dne prostok
ą
tne
Strumie
ń
wektora
A
r
przez obie rozpatrywane
ś
ciany wynosi:
z
y
x
z
y
z
y
x
z
y
x
x
∆
∆
∆
=
∆
∆
−
∆
+
x
A
)]
,
,
(
A
)
,
,
(
[A
x
x
x
δ
δ
Zgodnie ze wzorem Taylora. Strumienie wektora A przez prostopadłe
ś
ciany prostopadło
ś
cianu s
ą
równe:
z
y
x
∆
∆
∆
y
A
y
δ
δ
oraz
z
y
x
∆
∆
∆
z
A
z
δ
δ
Wobec tego przez wszystkie
ś
ciany wynosi on
z
y
x
∆
∆
∆
+
+
z
A
y
A
x
A
z
y
x
δ
δ
δ
δ
δ
δ
z
y
x
∆
∆
∆
=
∆
V
, wi
ę
c otrzymujemy
z
A
y
A
x
A
A
z
y
x
δ
δ
δ
δ
δ
δ
+
+
=
r
div

13. Rodzaje i klasy równa
ń
ró
ż
niczkowych stosowanych przy opisie pól
elektromagnetycznych.
Równania ró
ż
niczkowe:
-
eliptyczne (Laplace’a, Poissona, Helmholtza)
-
paraboliczne (równanie przewodnictwa)
-
hiperboliczne (równanie falowe)
I. Równanie eliptyczne
-
równanie Laplace’a
skalarne:
0
V
2
=
∇
wektorowe:
0
A
=
∆
r
V - funkacja skalarna lub składowa wektora
∇
- nabla
2
∇
- laplasjan skalarny
∆
- laplasjan wektorowy
-
równanie Poissona
skalarne:
f
V
2
−
=
∇
wektorwe:
F
A
r
r
−
=
∆
f – funkcja opisuj
ą
ca przestrzenny rozkład
ź
ródeł wzbudzaj
ą
cych pole
-
równanie Helmholtza
skalarne jednorodne:
0
V
k
-
V
2
2
=
∇
skalarne niejednorodne:
f
V
k
-
V
2
2
−
=
∇
wektorowe jednorodne:
0
A
k
-
A
2
=
∆
r
r
wektorowe jednorodne:
F
A
k
-
A
2
r
r
r
−
=
∆
II. Równanie paraboliczne:
przewodnictwa (np.dyfuzji,Fouriera)
skalrne:
t
V
h
1
V
2
2
δ
δ
⋅
=
∇
wektorowe:
t
A
h
1
A
2
δ
δ
r
r
⋅
=
∆
; h
2
– współczynnik rzeczywisty
14. Poda
ć
definicje i opisa
ć
poj
ę
cie: „Rotacja pola wektorowego” dla wybranego układu
współrz
ę
dnych.
Def.
F – pole wektorowe
)
,
R
P
,
Q
(R
rotF
'
y
'
x
'
x
'
z
'
y
'
y
P
Q
−
−
−
=
F=(P,Q,R)
Rotacj
ą
pola wektorowego F nazywamy pole wektorowe
)
,
R
P
,
Q
(R
rotF
'
y
'
x
'
x
'
z
'
y
'
y
P
Q
−
−
−
=
R
Q
P
z
x
k
j
i
rotF
δ
δ
δ
δ
δ
δ
y
r
r
r
=
(*)
(Dla pola potencjalnego rotacja równa jest zero)
F
F
rot
r
r
×
∇
=
Istot
ę
rotacji najłatwiej wytłumaczy
ć
na przykładzie jakiej
ś
wielko
ś
ci fizycznej. We
ź
my ruch
obrotowy cieczy (w miejscu tworzenia si
ę
wirów). Pr
ę
dko
ść
liniowa cz
ą
steczek płynu jest równa
ω
rsin
α
,
ω
- pr
ę
dko
ść
k
ą
towa
r
ω
v
×
=
z
y
x
z
y
x
1
z
1
y
1
x
r
1
ω
1
ω
1
ω
ω
z
y
x
⋅
+
⋅
+
⋅
=
+
+
=
Po wykorzystaniu (*) otrzymamy rotv=2
ω
⇒
rotv
2
1
ω
=
co oznacza,
ż
e wektor pr
ę
dko
ś
ci k
ą
towej jest
równy połowie rotacji wektora pr
ę
dko
ś
ci liniowej.

15. Metoda rozdzielenia zmiennych – zastosowanie na przykładzie rozwi
ą
zania równania
Laplace’a w układzie kartezja
ń
skim na płaszczy
ź
nie.
Równanie Laplace’a w układzie kartezja
ń
skim w R
3
0
V
2
=
∇
V=(X(x),Y(y),Z(z))
0
V
V
x
V
2
2
2
2
2
2
=
+
+
z
y
δ
δ
δ
δ
δ
δ
V=(X,Y,Z)
Równanie Laplace’a w układzie kartezja
ń
skim w R
2
(na płaszczy
ź
nie)
równanie wyj
ś
ciowe
→
0
V
x
V
2
2
2
2
=
+
y
δ
δ
δ
δ
V=(X,Y)
XY
:
0
Y
X
x
X
Y
2
2
2
2
=
+
y
δ
δ
δ
δ
0
Y
Y
1
x
X
X
1
2
2
2
2
=
+
y
δ
δ
δ
δ
(*)
Stosujemy podstawienie:
2
2
2
p
x
X
X
1
=
d
d
p-stała rozdzielenia zmiennych
Aby została zachowana równo
ść
(*)
2
2
2
p
Y
Y
1
−
=
dy
d
Po rozdzieleniu zmiennych równanie wyj
ś
ciowe zast
ę
pujemy układem równa
ń
:
=
+
=
−
0
Yp
y
Y
0
Xp
x
X
2
2
2
2
2
2
d
d
d
d
16. Zestawi
ć
i scharakteryzowa
ć
wielko
ś
ci wyst
ę
puj
ą
ce w obwodach elektrycznych i
magnetycznych.
Strumie
ń
elektryczny
Φ
e
=
∫
DdS
Strumie
ń
magnetyczny
Φ
m.
=
∫
BdS
. Nazywa si
ę
go inaczej strumieniem indukcji. Jednostk
ą
strumienia jest 1 weber (Wb)
1Wb = 1T
∗
m
2
= 1
s
V
m
m
C
s
V
*
1
*
*
*
2
2
=
=
Ze wzgl
ę
du na to,
ż
e linie pola magnetycznego (linie indukcji) s
ą
krzywymi zamkni
ę
tymi, strumie
ń
przez powierzchni
ę
zamkni
ę
t
ą
jest równy zero:
∫
=
0
Bds
.
B=
µ
0
*H
µ
0
=
2
0
*
1
c
ε
=
2
16
2
9
*
10
*
9
*
*
10
*
*
36
m
C
s
m
V
Π
=4
π
*10
-7
m
A
s
V
*
*
=1.25663706144*10
-6
V*s*A
-1
*m
-1
Indukcja magnetyczna B jest to wektor o kierunku pola. Jednostk
ą
indukcji magnetycznej jest 1 Tesla
1T = 1
m
C
s
N
*
*
=1
2
*
*
*
m
C
s
m
N
=1
2
*
m
s
V
Indukcja elektryczna to wielko
ść
któr
ą
mierzy si
ę
w takich samych jednostkach jak polaryzacj
ę
C/m
2
D =
ε
0
E + P.
=>

Nat
ęż
enie pola magnetycznego oznaczamy liter
ą
H i okre
ś
lamy wzorem
H=
r
I
Π
2
.
Jednostk
ą
nat
ęż
enia pola magnetycznego jest A*m
-1
. Nat
ęż
enie pola jest wektorem (osiowym).
Potencjał elektryczny okre
ś
la si
ę
wzorem
V
e
=
r
Q
0
4
πε
E=-gradV
e
V
e
=-
∫
∞
r
Edr
.
Potencjał magnetyczny przypisujemy do pola magnetycznego i okre
ś
lamy wzorem
V
m
=
∫
∞
r
Hdr
H=-gradV
m
17. Poda
ć
definicj
ę
i opisa
ć
poj
ę
cie: “Strumie
ń
pola wektorowego“ dla wybranego układu
współrz
ę
dnych.
Strumie
ń
pola skalarnego
∫
S
udS
=
Φ
u
Skalarny strumie
ń
pola wektorowego opisany jest wzorem
∫
S
wdS
=
Φ
nazywany jest strumieniem wektora w.
Wektorowy strumie
ń
pola wektorowego
∫
×
S
dS
w
=
Φ
w
18. Wyznaczy
ć
rozkład pola elektrostatycznego wokół ładunku punktowego.
Niech ładunek punktowy q znajduje si
ę
w
ś
rodowisku jednorodnym i izotropowym o przenikalno
ś
ci
elektrycznej
ε
.Wokół tego ładunku zakre
ś
lamy umy
ś
lon
ą
powierzchni
ę
kulist
ą
o powierzchni S i
promieniu r. Z twierdzenia Gaussa wynika,
ż
e strumie
ń
wektora indukcji elektrycznej przez
powierzchni
ę
zamkni
ę
t
ą
S
Ψ
= D4
π
r
2
= q
Uwzgl
ę
dniaj
ą
c zale
ż
no
ść
D=
ε
E otrzymujemy
E=
2
4
r
q
πε
Nat
ęż
enie pola elektrycznego jest odwrotnie proporcjonalne do kwadratu odległo
ś
ci od rozpatrywanej
powierzchni do punktu, w którym jest umieszczony ładunek. Linie nat
ęż
enia pola elektrycznego
rozchodz
ą
si
ę
promieniowo we wszystkich kierunkach. Ze wzgl
ę
du na symetri
ę
kulist
ą
powierzchnie
ekwipotencjalne s
ą
sferami koncetrycznymi.
19. Poda
ć
analogie pomi
ę
dzy polem elektrycznym pr
ą
du stałego i polem elektrostatycznym
Pole elektrostatyczne jest poj
ę
ciem fikcyjnym i w rzeczywistych warunkach nie istnieje ,
bowiem nie ma takich układów, w których ładunki byłyby niezmienne i nieruchome. Okazuje si
ę
jednak,
ż
e wyniki otrzymane dla pola elektrostatycznego mo
ż
na równie
ż
stosowa
ć
w przypadku pól
zmieniaj
ą
cych si
ę
powoli. Z tego powodu rezultaty uzyskane dla pól elektrostatycznych znajduj
ą
zastosowanie praktyczne .
Pole elektryczne
Pole elektrostatyczne
20. Zdefiniowa
ć
współczynniki potencjałowe własne i wzajemne oraz wyja
ś
ni
ć
ich sens w
aspekcie obliczania pojemno
ś
ci.
Dla dwóch jednakowych przewodów o niesko
ń
czonej długo
ś
ci , równoległych do ziemi
=>
1
a
2
h
1
b
h
2
ziemia
h
1
h
2
2’
1’
∫
∫
=
=
=
−
=
=
→
→
→
→
→
→
→
→
S
B
A
B
A
I
dS
J
J
div
E
J
dl
E
E
rot
0
0
γ
ϕ
ϕ
∫
∫
−
=
=
=
−
=
=
→
→
→
→
→
→
→
→
S
B
A
B
A
Gaussa
q
dS
D
D
div
E
D
dl
E
E
rot
0
0
ε
ϕ
ϕ
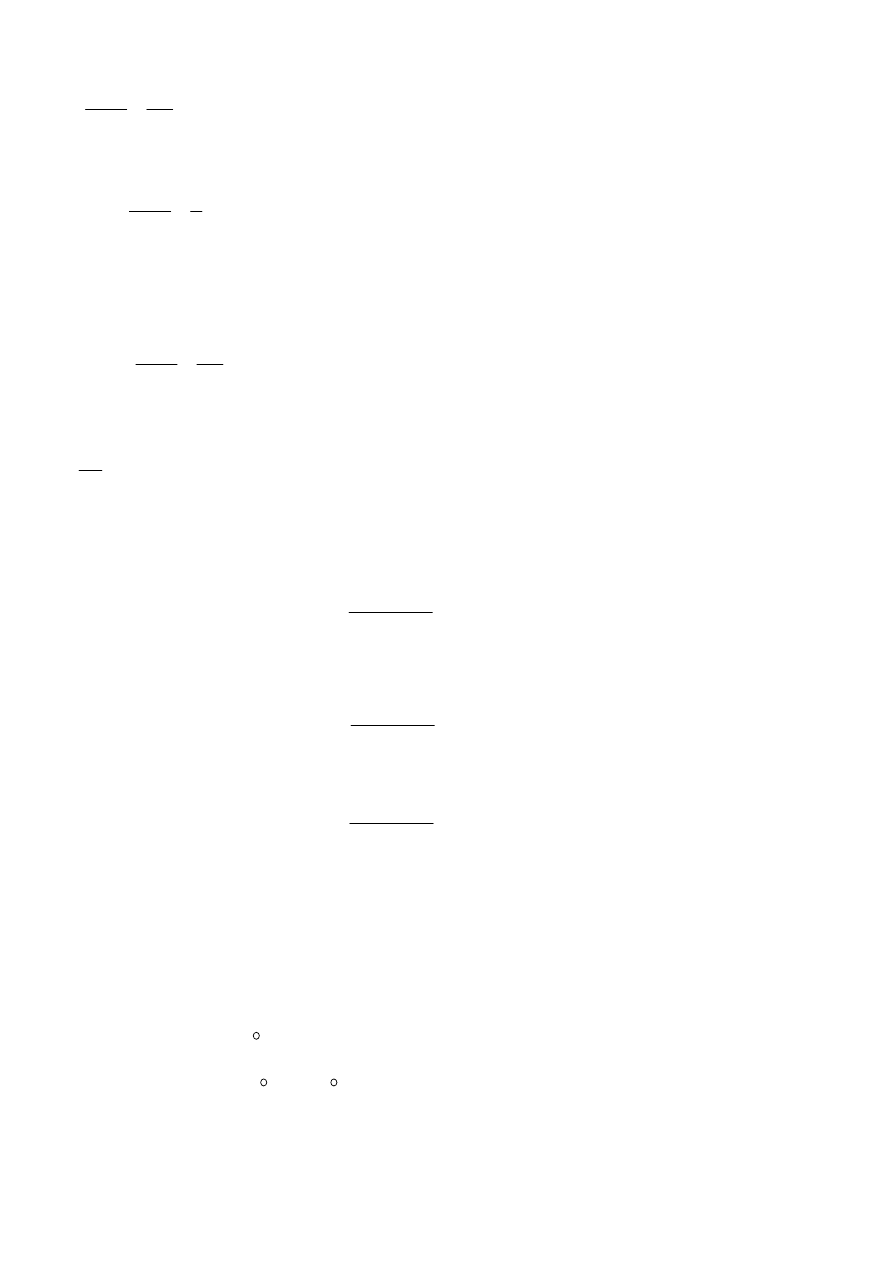
Współczynniki potencjalne:
-własne
-wzajemne
Przy obliczaniu pojemno
ś
ci
a) Podczas obliczania pojemno
ś
ci linii napowietrznej otrzymujemy wzór na jej potencjał
Natomiast pojemno
ść
b) Dla dwóch przewodów jak na pocz
ą
tku
Pojemno
ść
linia pierwsza-ziemia
Pojemno
ść
linia druga ziemia
Pojemno
ść
linia pierwsza – linia druga
21. Poda
ć
podstawowe zale
ż
no
ś
ci opisuj
ą
ce pole elektrostatyczne
0
1
0
11
2
ln
2
1
r
h
e
Π
=
γ
a
b
e
ln
2
1
0
21
12
Π
=
=
γ
γ
0
1
0
11
0
2
ln
2
r
h
e
V
Π
=
∗
=
τ
γ
τ
11
γ
l
C
=
2
12
22
11
12
22
11
γ
γ
γ
γ
γ
−
−
=
C
2
12
22
11
12
11
22
γ
γ
γ
γ
γ
−
−
=
C
2
12
22
11
12
12
γ
γ
γ
γ
−
=
C
E
D
divD
rotE
ε
ρ
=
=
=
0
∫
∫
∫
=
=
)
(
0
V
S
V
C
dV
DdS
Edl
ρ

22. Pojemno
ść
linii 2 przewodowej
Dwa jednakowe, bardzo długie, naładowane przewody s
ą
równoległe do powierzchni ziemii. 1.
Przewody przedstawiamy w postaci ładunków liniowych o g
ę
sto
ś
ci
τ.
2. zakładamy
τ
1
=−τ
2
3. Stosuj
ą
c metod
ę
odbi
ć
zwierciadlanych przedstawimy układ z rys. 1 jak na rys 2 (w ten sposób
realizuje si
ę
warunek V=0 w punktach powierzchni ziemii)
rys.1
rys. 2
4. Potencjały V1 i V2 przewodów 1 i 2 wyznaczamy na podstawie zasady superpozycji, przy
wykorzystaniu wzoru
1
2
C11
C12
C22
Rys. 3
Rys. 4

23. Wyznaczy
ć
potencjał i pole elektryczne w układzie składaj
ą
cym si
ę
z kuli o promieniu r
0
umieszczonej w polu jednorodnym o nat
ęż
eniu E
0
Kula wykonana z dielektryka o przenikalno
ś
ci elektrycznej
ε
1 i umieszczona w niesko
ń
cz. dielektryku
o przenikalno
ś
ci elektrycznej
ε
2.
W ka
ż
dej płaszczy
ź
nie równoległej do linii pola i przechodz
ą
cej przez
ś
rodek kuli pole jest
jednakowe. W tych warunkach pole zale
ż
y tylko od r i
Θ
(układ wsp. sferycznych), nie zale
ż
y od wsp.
φ
. Wewn
ą
trz i na zewn
ą
trz kuli potencjał spełnia równanie Laplace’a
∇
2
V=0, które dla wsp.
sferycznych przybiera posta
ć
:
0
sin
sin
1
1
2
2
2
=
∂
∂
Θ
Θ
∂
∂
Θ
+
∂
∂
∂
∂
r
V
r
r
V
r
r
r
Przyjmujemy rozwi
ą
zanie tego
równania w postaci:
Θ
−
−
=
cos
)
(
1
0
1
r
A
E
V
, 0
≤
r
≤
r
0
Θ
−
−
=
cos
)
(
2
2
0
2
r
A
E
V
, r
≥
r
0
gdzie A
1
, A
2
= const.
Składowe nat
ęż
enia pola elektrycznego wynosz
ą
:
dla 0
≤
r
≤
r
0
:
Θ
−
=
∂
∂
−
=
cos
)
(
1
0
1
1
A
E
r
V
E
r
Θ
−
−
=
Θ
∂
∂
−
=
Θ
sin
)
(
1
1
0
1
1
A
E
V
r
E
dla r>r
0
,
Θ
+
=
∂
∂
−
=
cos
)
2
(
3
2
0
2
2
r
A
E
r
V
E
r
Θ
+
−
=
Θ
∂
∂
−
=
sin
)
(
1
3
2
0
2
2
r
A
E
V
r
E
r
Wstawiaj
ą
c do powy
ż
szych warunki brzegowe (wykorzystujemy ci
ą
gło
ść
składowej stycznej wektora
E
r
oraz ci
ą
gło
ść
składowej normalnej wekt.
D
r
.
0
0
2
1
r
r
r
r
E
E
=
Θ
=
Θ
=
0
0
2
2
1
1
r
r
r
r
r
r
E
E
=
=
=
ε
ε
otrzymujemy:
Θ
+
−
=
Θ
−
−
sin
)
(
sin
)
(
3
0
2
0
1
0
r
A
E
A
E
Θ
+
=
Θ
−
cos
)
2
(
cos
)
(
3
0
2
0
2
1
0
1
r
A
E
A
E
ε
ε
Rozwi
ą
zuj
ą
c te równania otrzymamy :
0
2
1
2
1
1
2
E
A
ε
ε
ε
ε
+
−
=
3
0
0
2
1
2
1
2
2
r
E
A
ε
ε
ε
ε
+
−
=
wstawiamy to do wzorów na V
1
i V
2
(z pocz
ą
tku):
Θ
+
−
=
cos
2
3
0
2
1
2
1
r
E
V
ε
ε
ε
, 0
≤
r
≤
r
0
Θ
−
+
−
=
cos
2
2
3
0
2
1
2
1
0
2
r
r
r
E
V
ε
ε
ε
ε
, r>r
0
Nat
ęż
enie pola elektromagnetycznego we wn
ę
trzu kuli o promieniu r
0
wynosi:
1
0
01
1
1
A
E
E
E
E
r
−
=
+
=
Po wstawieniu A
1
otrzymujemy:
0
2
1
2
1
2
2
E
E
ε
ε
ε
+
=
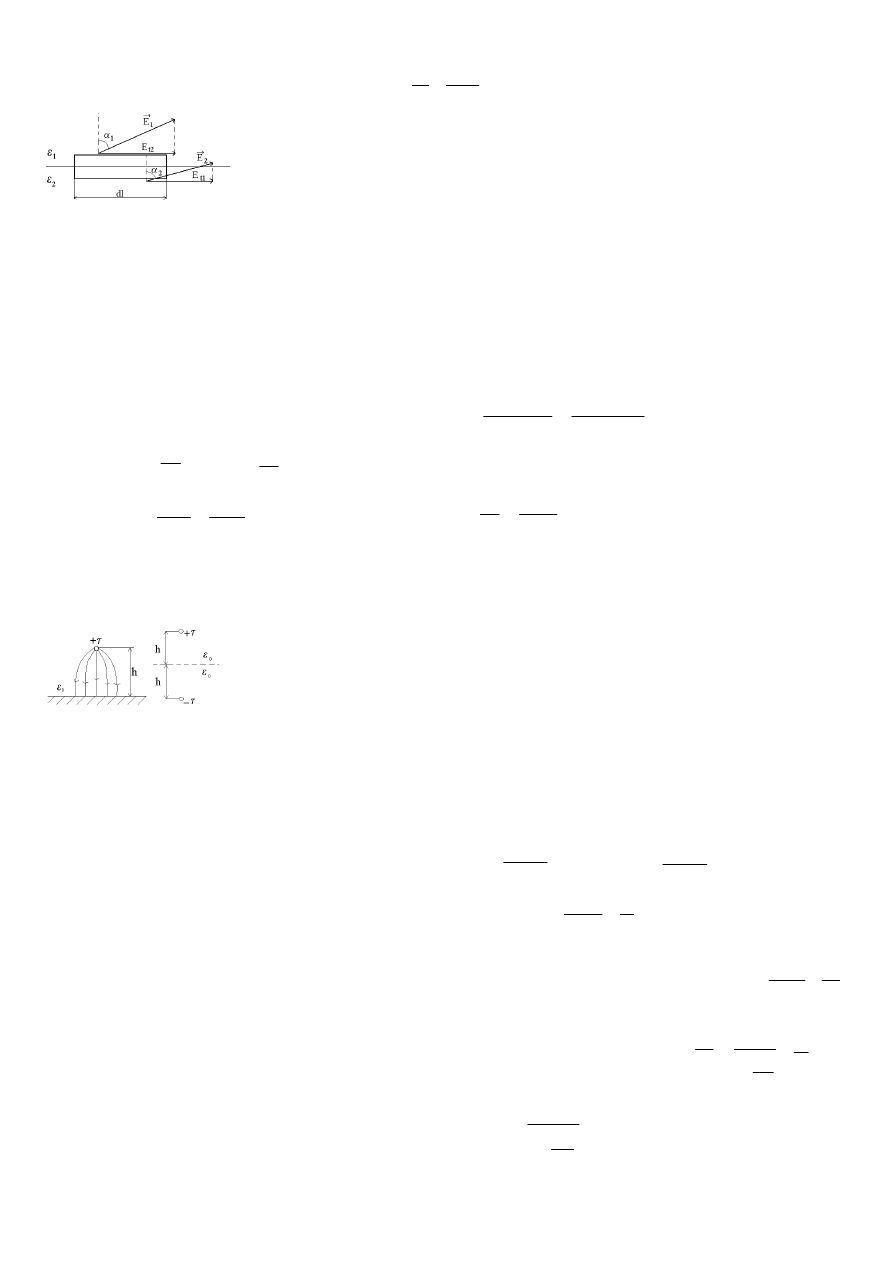
24. Wykaza
ć
,
ż
e w polu elektrostatycznym na granicy dwóch o
ś
rodków zachodzi zwi
ą
zek:
2
1
2
1
α
α
ε
ε
tg
tg
=
E
t1
, E
t2
– składowe styczne nat
ęż
enia pola elektr. b. blisko powierzchni granicznej, odpowiednio w
ś
rodowisku górnym i dolnym.
Napi
ę
cie wzdłu
ż
rozpatrwanej krzywej zamkni
ę
tej wynosi: E
t1
dl-E
t2
dl=0 poniewa
ż
napi
ę
cie wzdłu
ż
krzywej zamkni
ę
tej równa si
ę
zero. Otrzymujemy: E
t1
=E
t2
, czyli:
E
1
sin
α
1
=E
2
sin
α
2
.
Dla pola elektrycznego składowa styczna wektora nat
ęż
enia pola elektrycznego jest zawsze ci
ą
gła w
punktach powierzchni granicznej. Je
ż
eli na pow. granicznej
ś
rodowisk nie ma ładunku elektr. , to
składowa normalna wektora indukcji elektr. jest ci
ą
gła w punktach tej powierzchni :
D
1
cos
α
1
=D
2
cos
α
2
Ostatnie dwa równania dzielimy przez siebie stronami:
2
2
2
2
1
1
1
1
cos
sin
cos
sin
α
α
α
α
D
E
D
E
=
wiemy,
ż
e
1
1
1
E
D
=
ε
oraz
2
2
2
E
D
=
ε
otrzymujemy:
2
2
1
1
ε
α
ε
α
tg
tg
=
a ostatecznie:
2
1
2
1
α
α
ε
ε
tg
tg
=
.
wzór ten wyra
ż
a prawo załamania linii pola elektrycznego w punktach powierzchni granicznej.
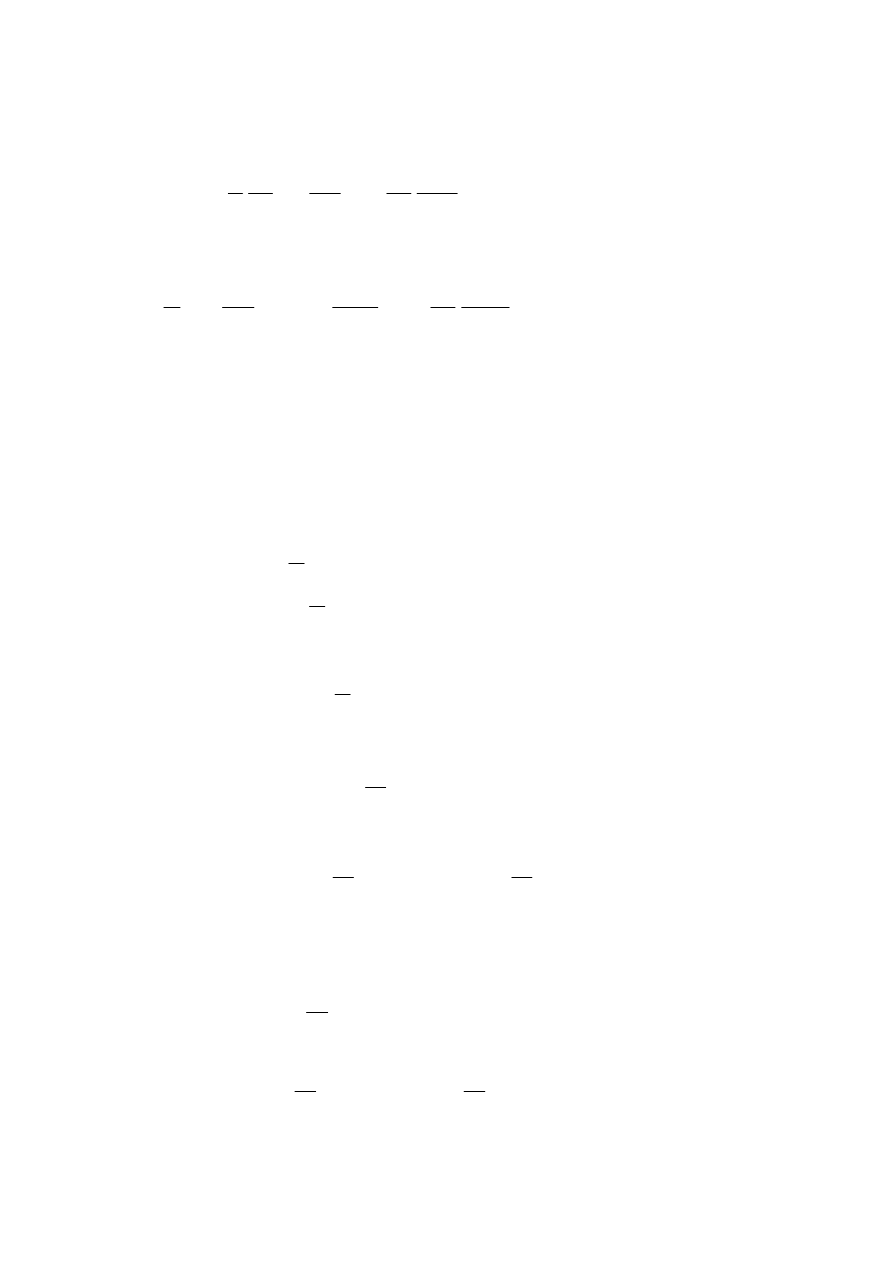
25. Wyznaczy
ć
pojemno
ść
linii jednoprzewodowej zawieszonej nad ziemi
ą
wykorzystuj
ą
c
metod
ę
odbi
ć
zwierciadlanych.
Rzeczywisty układ zast
ę
pujemy układem równowa
ż
nym stosuj
ą
c tzw. metod
ę
odbi
ć
zwierciadlanych.
Bardzo długi przewód o promieniu r
0
umieszczony jest na wysoko
ś
ci h nad powierzchni
ą
ziemi. Na
przewodzie znajduje si
ę
ładunek o stałej g
ę
sto
ś
ci liniowej
τ
. Przyjmujemy,
ż
e potencjał powierzchni
ziemi równy jest zeru. W tym celu rozpatrzymy dwa ładunki liniowe przeciwnego znaku umieszczone
w
ś
rodowisku o przenikalno
ś
ci elektrycznej
ε
0
wzdłu
ż
dwóch linii równoległych oddalonych od siebie
o 2h. Potencjał w punkcie P pola wyznaczamy za pomoc
ą
metody superpozycji:
∫
∫
+
=
0
1
2
2
2
2
1
1
)
(
)
(
N
r
N
r
dr
r
E
dr
r
E
V
ε
τ
1
1
2
)
(
r
r
E
Π
=
ε
τ
2
2
2
)
(
r
r
E
Π
−
=
N
0
– odległo
ść
od pkt. P w której potencjał równy jest zeru.
1
2
0
ln
2
r
r
V
ε
τ
Π
=
W celu wyznaczenia potencjału górnego przewodu przyjmujemy,
ż
e punkt P le
ż
y na jego
powierzchni, zatem r
1
=r
0
, r
2
=2h-r
0
≈
2h (bo r
0
<<2h). Zatem potencjał górnego przewodu:
0
0
0
2
ln
2
r
h
V
ε
τ
Π
=
Układ ten (przewód nad ziemi
ą
) mo
ż
emy traktowa
ć
jako kondensator, jedna okładka- pow.
przewodu, druga – pow. ziemi. Obliczamy pojemno
ść
na jednostk
ę
długo
ś
ci:
0
0
0
2
ln
2
r
h
V
C
l
ε
τ
Π
=
=
m
F
Pojemno
ść
odcinka przewodu o długo
ś
ci l wynosi:
0
0
2
ln
2
r
h
l
l
C
C
l
ε
Π
=
=

27. Algorytm wyznacz. pojemno
ś
ci uwarstwionego kondensatora płaskiego.
Mi
ę
dzy okładkami uwarstwionego kondensatora płaskiego istnieje n- warstw dielektryków o
przenikalno
ś
ciach elektrycznych
ε
1
,
ε
2
,...,
ε
n
. Gdy suma d
1
+d
2
+...d
n
odległo
ś
ci mi
ę
dzy płytkami jest
nieznaczna w porównaniu z rozmiarami płytek, wówczas mo
ż
emy przyj
ąć
,
ż
e w obszarze mi
ę
dzy
płytkami pole jest równomierne. Powierzchnia graniczna dwóch dielektryków jest powierzchni
ą
ekwipotencjaln
ą
. W zwi
ą
zku z tym kondensator n – warstwowy mo
ż
emy przedstawi
ć
w postaci
poł
ą
czenia szeregowego n – kondensatorów, przy czym w obszarze mi
ę
dzy płytkami ka
ż
dego
kondensatora znajduje si
ę
dielektryk o stałej przenikalno
ś
ci elektrycznej. Pojemno
ś
ci kondensator.:
1
1
1
d
S
C
ε
=
....
2
2
2
d
S
C
ε
=
n
n
n
d
S
C
ε
=
S – pole powierzchni jednej okładki.
Pojemno
ść
C kondens. uwarstwionego równa si
ę
pojemno
ś
ci zast
ę
pczej poł
ą
czenia szeregowego
kondensator. o pojemno
ś
ciach C
1
,C
2
,...C
n
, wobec czego:
n
C
C
C
C
1
...
1
1
1
2
1
+
+
=
Zatem
∑
=
=
+
+
=
n
i
i
i
d
d
d
d
S
S
C
n
n
1
...
2
2
1
1
ε
ε
ε
ε
28. Wyznaczanie pojemno
ś
ci kondensatora walcowego.
Zakładamy,
ż
e na ka
ż
dej powierzchni walcowej o długo
ś
ci l i promieniu R
1
i R
2
znajduje si
ę
ładunek
q. Mi
ę
dzy tymi powierzchniami znajduje si
ę
dielektryk.
Na podstawie twierdzenia Gaussa: q = DS =
ε
E 2
Π
rl
wobec czego nat
ęż
enie pola elektrycznego:
E
:=
q
2
Πε
rl
Korzystaj
ą
c z zale
ż
no
ś
ci mi
ę
dzy nat
ęż
eniem pola elektrycznego a napi
ę
ciem mi
ę
dzy okładkami
kondensatora
U
:=
R1
R2
r
E
⌠
⌡
d
otrzymamy
U
q
2
Πε
rl
:=
q
ln
R2
R1
po podstawieniu tego wyra
ż
enia do wzoru C = q/U otrzymamy
C
2
Πε
rl
:=
ln
R2
R1
W przypadku gdy znany jest wektor nat
ęż
enia pola el. E oraz indukcji elektrycznej D mi
ę
dzy
okładkami dwóch ciał metalowych (o promieniach R
1
i R
2
i długo
ś
ci l ) na których jest umieszczony
ładunek q , pojemno
ść
mo
ż
na wyznaczy
ć
z zale
ż
no
ś
ci: C = q / U przy czym:
q
S
S
D
⌠
⌡
d
:=
U
R1
R 2
l
E
⌠
⌡
d
:=
R1
wi
ę
c po podstawieniu
C
S
.
S
D
⌠
⌡
d
R 1
R 2
l
E
⌠
⌡
d
:=
.
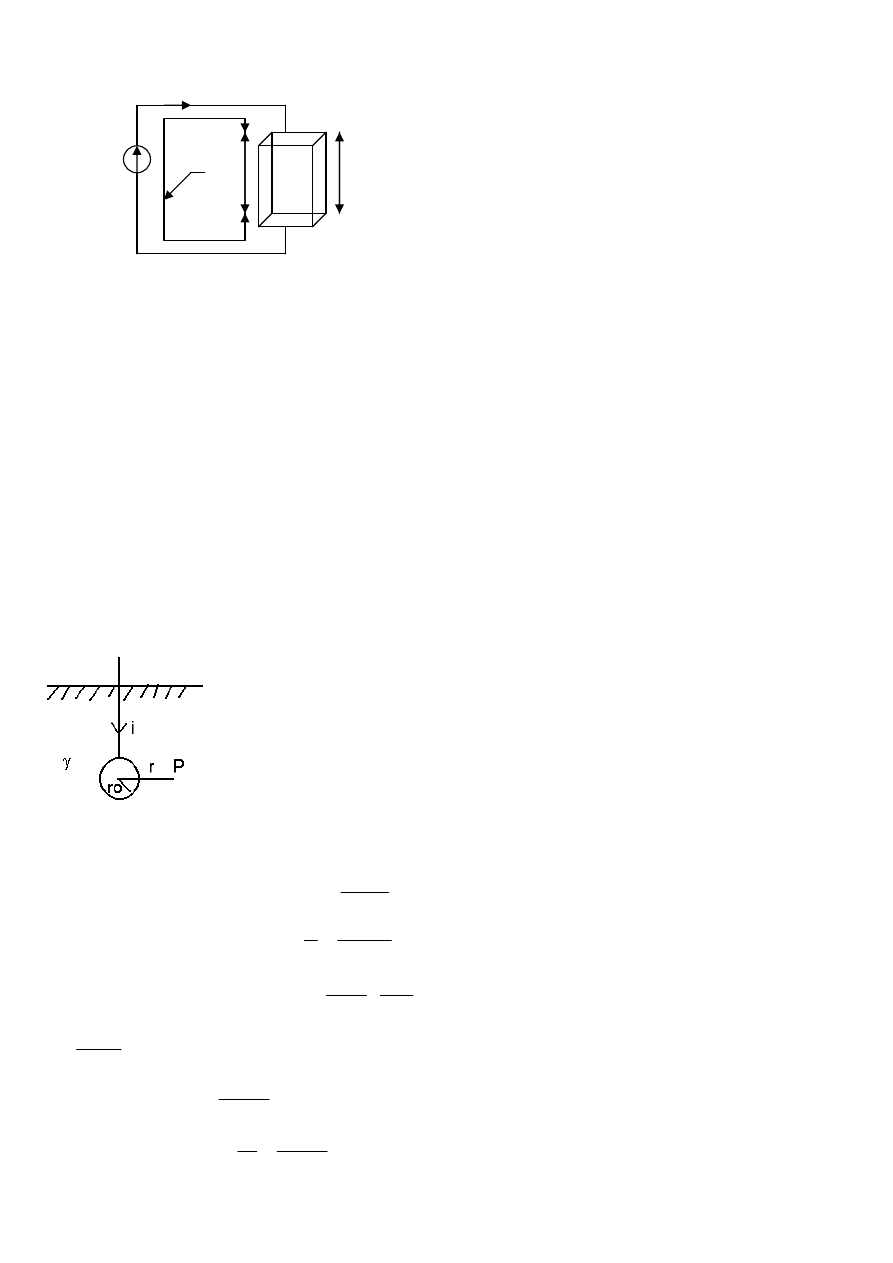
29. Wyznaczy
ć
potencjał i nat
ęż
enie pola elektrycznego wokół i w walcu przewodz
ą
cym o
konduktywno
ś
ci
γγγγ
1
i promieniu R
1
, znajduj
ą
cym si
ę
w
ś
rodowisku o konduktywno
ś
ci
γγγγ
2
= const. .W
ś
rodowisku tym istnieje równomierne pole elektryczne o nat
ęż
eniu E
0
.
Przyjmuj
ę
,
ż
e potencjał w kierunku osi z jest stały. Równanie Laplace’a dla współrz
ę
dnych
walcowych ma posta
ć
:
∇
2
V
=
(
)
1
r
r
V
r
r
V
r
∂
∂
∂
∂
∂
∂
+
1
2
2
2
Θ
= 0
Wyra
ż
am potencjał jako iloczyn dwóch funkcji: R = f(r),
Φ
= f(
Θ
), czyli V = R*
Φ
.
Po podstawieniu do powy
ż
szego równania otrzymujemy:
(
)
1
2
1
2
2
2
2
r
R
r
R
r
r
r
∂
∂
∂
∂
∂
∂
+
+
Φ
Φ
Θ
= 0
Równanie Laplace’a posiada rozwi
ą
zanie w układzie współrz
ę
dnych walcowych w postaci :
V(r,
Θ
) =
(
)(
)
A r
A r
B
n
B
n
n
n
n
n
n
n
n
+
+
−
=
∞
∑
'
'
sin
cos
1
Θ
Θ
Stałe A
n
, A
’
n
, B
n
,B
’
n
oraz n wyznaczamy z warunków brzegowych . Linie pola elektrycznego s
ą
prostopadłe do osi walca (z) ,z symetrii pola wzgl
ę
dem osi x wynika ,
ż
e potencjał skalarny V w
punkcie (r,
Θ
) jest taki sam jak w punkcie (r ,-
Θ
).Warunek ten spełniaj
ą
funkcje parzyste wi
ę
c B
n
= 0.
Przyjmuj
ę
,
ż
e potencjał osi y = 0 dlatego rozwi
ą
zanie ogólne nie mo
ż
e zawiera
ć
funkcji
wielokrotno
ś
ci k
ą
ta
Θ
, s
ą
spełnione warunki :
( )
V r,
Π
2
0
=
(
)
V r,
−
=
Π
2
0
Z powy
ż
szych warunków wynika ,
ż
e stała n = 1.
Funkcja potencjału przyjmuje posta
ć
:
(
)
V
A r
B
A
r
=
+
1
1
1
'
'
cos
Θ
Po wprowadzeniu nowych zmiennych
K
A B
1
1
1
=
'
,
K
A B
2
1
1
=
'
'
,
Funkcja potencjału przyjmie posta
ć
:
(
)
V
K r
K
r
=
+
1
2
cos
Θ
Aby wyznaczy
ć
K
1
,
K
2
musimy dysponowa
ć
układem dwóch równa
ń
,w tym celu obliczamy
nat
ęż
enie pola elektrycznego E = - grad V .
(
)
(
)
E
K
K
K
r
r
K
r
= −
−
+
+
1
1
2
2
2
2
1
1
cos
sin
Θ
Θ
Θ
W odległo
ś
ci r =
∞
przy k
ą
cie
Θ
= 0 , E = E
0
.Po podstawieniu tego warunku do powy
ż
szego
równania otrzymujemy K
1
= -E
0
.
Dla r = R
1
potencjał V = 0, st
ą
d otrzymujemy K
2
, dla dowolnego k
ą
ta
Θ
. K
2
= E
0
R
1
2
Ostatecznie :
( )
V
E r
R
r
= −
−
0
1
2
cos
Θ
oraz nat
ęż
enie
( )
( )
[
]
E
E
R
r
r
R
r
=
+
− −
0
1
1
1
1
1
2
2
1
2
2
cos
sin
Θ
Θ
Θ
30. Podstawowe prawa opisuj
ą
ce pole przepływowe pr
ą
du stałego
Polem przepływowym nazywamy pole elektryczne w
ś
rodowisku przez które przepływa pr
ą
d elektryczny. W
szczególnym przypadku przepływu pr
ą
du stałego, pole elektryczne nazywamy statycznym polem przepływowym.
Podstawowe prawa opisuj
ą
ce statyczne pole przepływowe to: prawo Ohma, Kirchhoffa oraz Joule’a – Lenza. Prawa
te mog
ą
by
ć
wyra
ż
one w postaci wektorowej.
1. Prawo ohma w postaci wektorowej.
W przypadku wyst
ę
powania pola elektrycznego o nat
ęż
eniu E w
ś
rodowisku przewodz
ą
cym, napi
ę
cie mi
ę
dzy punktami
A i B wyra
ż
a si
ę
wzorem:
UAB
:=
R1
R2
r
E
⌠
⌡
d
Je
ż
eli nat
ęż
enie pola elektrycznego wewn
ą
trz elementu przewodz
ą
cego o długo
ś
ci
∆
l przekroju
∆
s i konduktancji
γ
oznaczymy przez E to zmiana potencjału na długo
ś
ci
∆
l wynosi
∆
U = E
∆
l
Nat
ęż
enie pr
ą
du elektrycznego o g
ę
sto
ś
ci J wynosi :
∆
I = J
∆
S
Z prawa Ohma w postaci skalarnej
R =
∆
U /
∆
I , wtedy R = E
∆
l / J
∆
S , a poniewa
ż
rezystancja rozpatrywanego elementu wynosi R =
∆
l /
γ
s to po
porównaniu stronami otrzymamy :
E / J =
γ
lub J =
γ
E
Prawo Ohma w postaci wektorowej wyra
ż
a zwi
ą
zek mi
ę
dzy nat
ęż
eniem pola elektrycznego w przewodniku a g
ę
sto
ś
ci
ą
pr
ą
du elektrycznego.
2. Prawo Joule’a Lenza.
Prawo to umo
ż
liwia obliczenie mocy która zostanie przekształcona na ciepło w elemencie o konduktywno
ś
ci
γ
i obj
ę
to
ś
ci
V, przy nat
ęż
eniu pola elektrycznego E w tym elemencie.
∆
P =
∆
U
∆
I = ( E
∆
l)(J
∆
S) = EJ
∆
V, przy czym
∆
V to elementarna obj
ę
to
ść
.
Po uwzgl
ę
dnieniu wzoru J =
γ
E elementarna moc wydzielona w elemencie przewodz
ą
cym o elementarnej obj
ę
to
ś
ci
∆
V
wynosi:
dP =
γ
E
2
dV , st
ą
d
P =
V
V
γ
E
2
⌠
⌡
d
G
ę
sto
ść
obj
ę
to
ś
ciowa wynosi :
dP
dV
=
γ
E
2
⋅
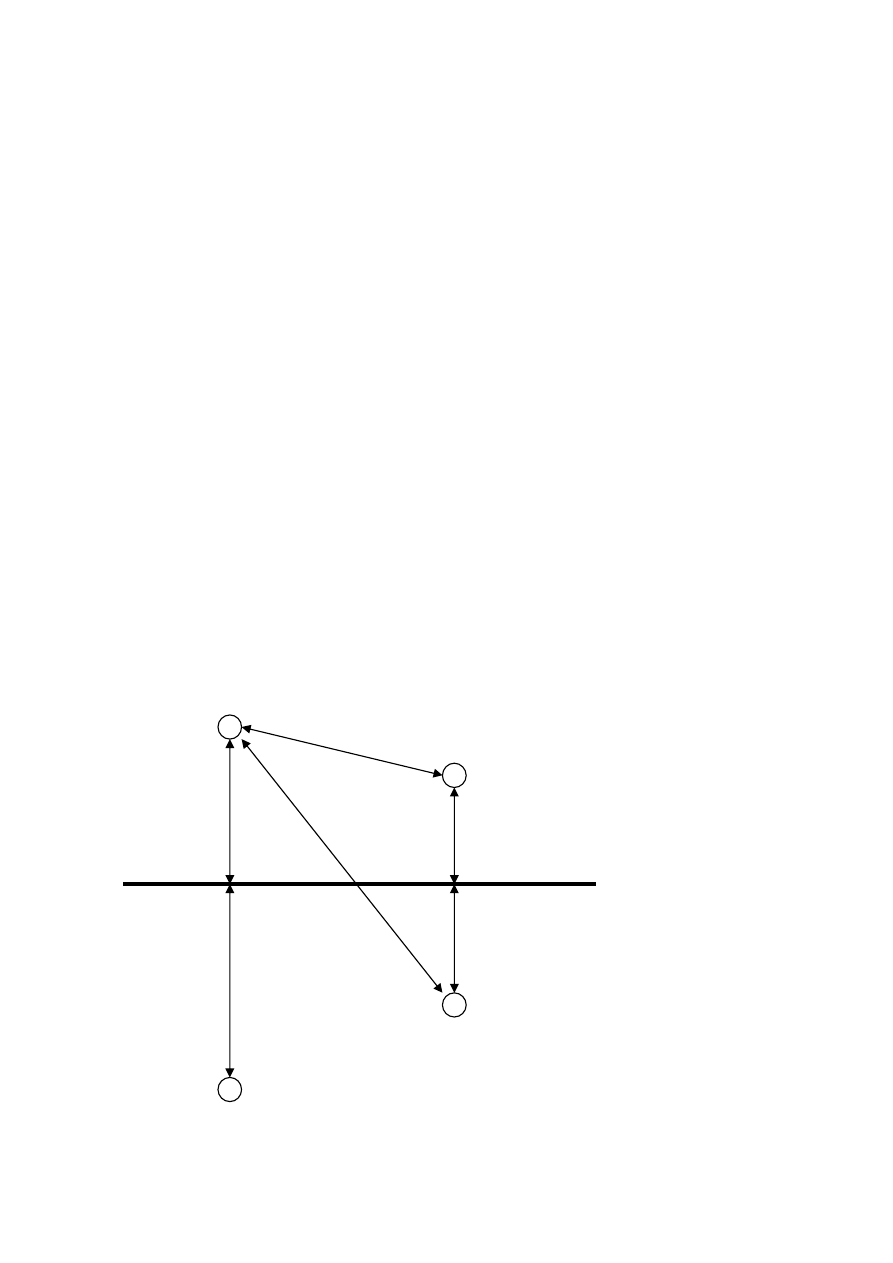
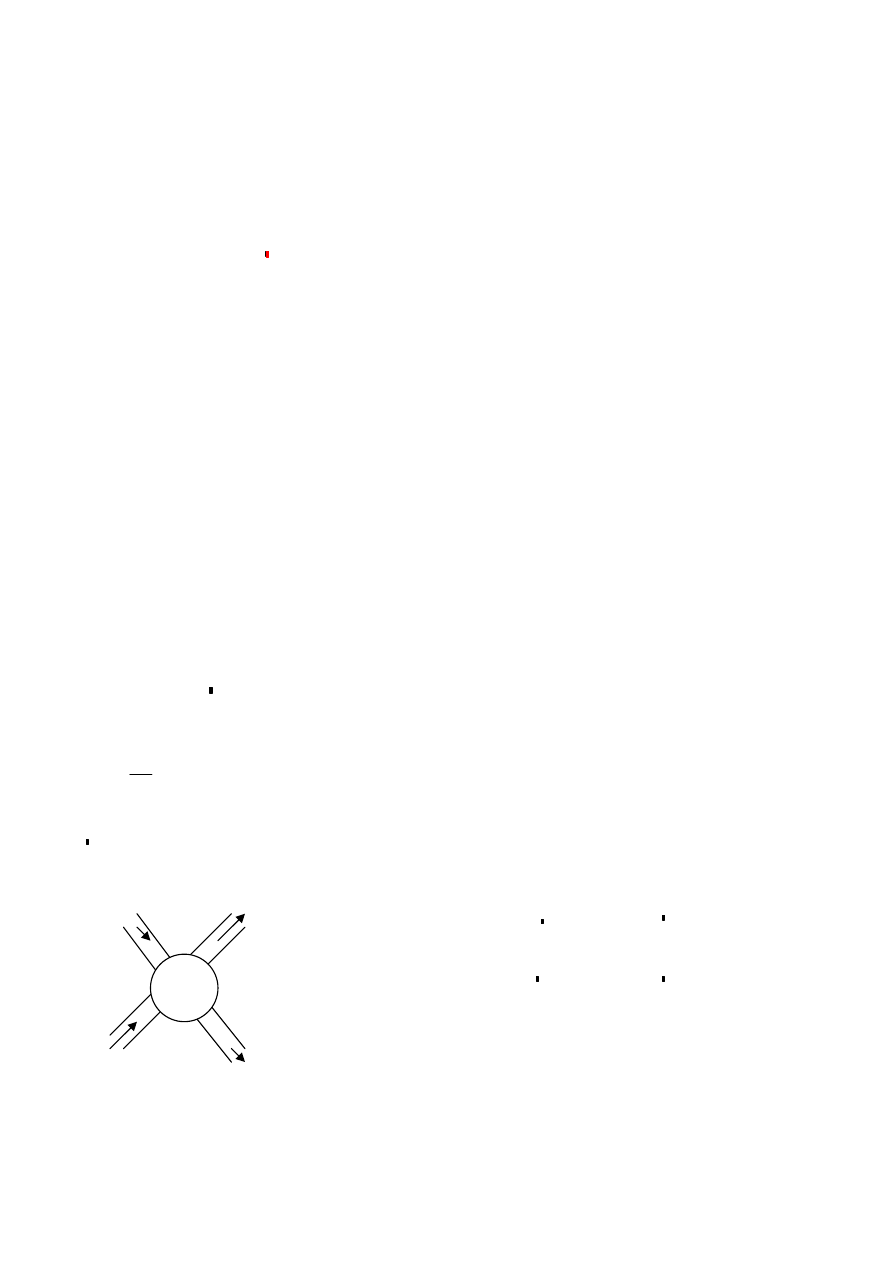
3. Pierwsze i drugie prawo Kirchhoffa.
S
S
J
⌠
⌡
d
= 0
oznacza,
ż
e wektor g
ę
sto
ś
ci pr
ą
du stałego J jest bez
ź
ródłowy, oraz tzw. zasad
ę
ci
ą
gło
ś
ci pr
ą
du
elektrycznego. I
1
, S
1
I
3,
S
3
S1
S
J1
⌠
⌡
d
=
I1
S2
S
J2
⌠
⌡
d
=
I2
I
2
, S
2
S I
4
, S
4
S3
S
J3
⌠
⌡
d
=
I3
−
S4
S
J4
⌠
⌡
d
=
I3
−
S
.
S
J
⌠
⌡
d
=
S1
.
S
J1
⌠
⌡
d
S2
.
S
J2
⌠
⌡
d
+
S3
.
S
J3
⌠
⌡
d
+
S4
.
S
J4
⌠
⌡
d
+
czyli I
1
+I
2
+I
3
+I
4
=0
Równanie to wyra
ż
a pierwsze prawo Kirchhoffa w postaci wektorowej. Div J = 0
Drugie prawo Kirchhoffa w postaci wektorowej dotyczy bilansu napi
ęć
.
I
E
g
l
1
U
ż
r
l
2
U
Napi
ę
cie
ź
ródłowe wywołane na drodze l
1
wynosi:
U zr
l 1
.
l
E g
⌠
⌡
d
:=
l 1
Napi
ę
cie na drodze l
2
U
l 2
.
l
E
⌠
⌡
d
:=
l 2
Bilans napi
ęć
mo
ż
na wyrazi
ć
w postaci wektorowej
l1
.
l
Eg
⌠
⌡
d
=
l2
.
l
E
⌠
⌡
d
Równanie to nazywamy drugim prawem Kirchh. w postaci wektorowej.
31. Opisa
ć
sposób i wyprowadzi
ć
zale
ż
noci noezb
ę
dnych do obliczania rezystancji uziomu
kulistego
Uziom to elektroda umieszczona w ziemi. Pr
ą
d przepływaj
ą
cy przez uziom wytwarza w okół niego
pole przepływowe
γ
-konduktywno
ść
gruntu
ro- promie
ń
uziomu
r odległo
ść
P od
ś
rodka uziomu
G
ę
sto
ść
powierzchniowa pr
ą
du :
2
4
r
i
J
∏
=
Nat
ęż
enie pola w punkcie P
2
4
r
i
J
E
γ
γ
∏
=
=
Potencjał w punkcie P
∫
∫
∞
−
∏
=
−
=
r
r
dr
i
Edr
V
2
4
γ
r
i
V
γ
∏
=
4
Potencjał uziomu
0
0
4
r
i
V
γ
∏
=
Rezystancja uziomu
0
0
4
1
r
i
V
R
γ
∏
=
=
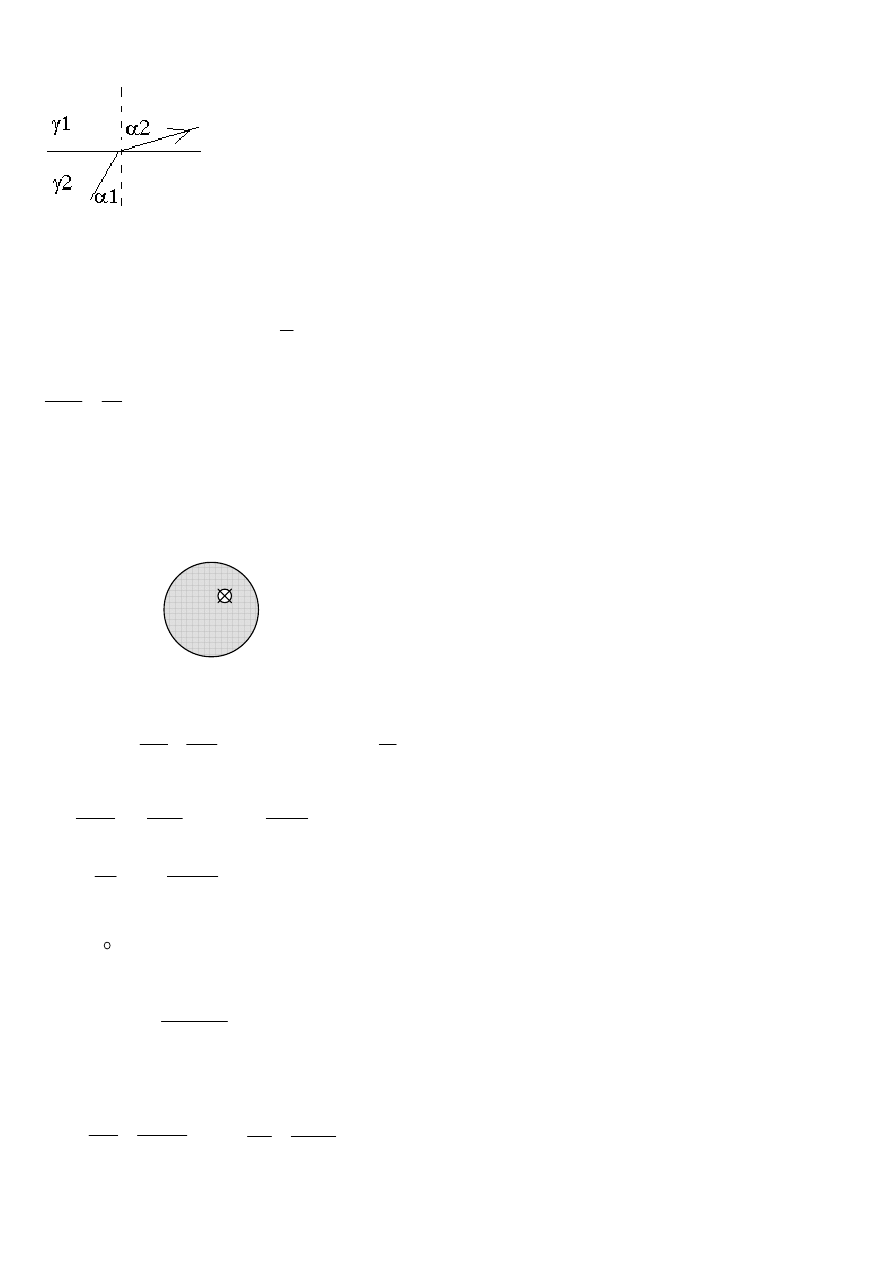
33. Wykaza
ć
ż
e w polu przepływowym na granicy dwuch o
ś
rodków zachodzi zwi
ą
zek
Na granicy dwuch o
ś
rodków nast
ę
puje ci
ą
gło
ść
składowej normalnej wektora g
ę
sto
ś
ci pr
ą
du
2
1
n
n
J
J
=
oraz ci
ą
gło
ść
składowej stycznej wektora nat
ęż
enia pola elektyrycznego
2
1
t
t
E
E
=
a wi
ę
c
zachodz
ą
zale
ż
no
ś
ci
2
2
1
1
cos
cos
α
α
J
J
=
2
2
1
1
sin
sin
α
α
E
E
=
gdzie
γ
J
E
=
dziel
ą
c te równania stronami otrzymujemy:
2
1
2
1
γ
γ
α
α
=
tg
tg
34. Zdefiniowa
ć
poj
ę
cia: indukcyjno
ść
wewn
ę
trzna i zewn
ę
trzna, oraz poda
ć
algorytm ich
wyznaczania.
Je
ż
eli podzielimy obszar w którym istnieje pole magnetyczne na dwa podobszary
Obszar 1 jest ograniczony, obszar 2 ma
ż
e by
ć
ale nie musi.
Obszar 1 nazywamy wewn
ę
trznym, a 2 zewn
ę
trznym. Zakładamy
ż
e
dany jest niesk. długi przewód wiod
ą
cy pr
ą
d
Całkowit
ą
indukcyjno
ść
dzielimy na wewn
ę
trzn
ą
L
w
i zewn
ę
trzn
ą
L
z
.
L= L
w
+ L
z
Na podstawie wzoru na indukcyjno
ść
wzajemn
ą
mi
ę
dzy konturami i, k:
k
iki
i
ki
ki
ik
I
I
M
M
Ψ
=
Ψ
=
=
mo
ż
na napisa
ć
I
L
Ψ
=
Indukcyjno
ść
własna wynosi:
2
m
i
k
ki
i
k
2
I
W
2
d
d
r
J
J
I
4
L
i
k
=
Ω
Ω
π
µ
=
∫ ∫
Ω Ω
Ω
π
µ
=
∫ ∑ ∫
Ω =
d
r
J
dl
J
8
W
n
1
k
l
k
k
k
m
k
Zakładaj
ą
c,
ż
e wszystkie pr
ą
dy s
ą
skupione mo
ż
na napisa
ć
:
∫
∫
=
Ω
Ω
l
Idl
Jd
Wykorzystuj
ą
c definicj
ę
indukcyjno
ś
ci wzajemnej i własnej:
∑ ∑
=
=
n
1
i
n
1
k
k
i
ik
m
2
I
I
M
W
Dla pojedynczego konturu powy
ż
szy wzór ma posta
ć
W
m
=LI
2
/2, L=2W
m
/I
2
Podział indukcyjno
ś
ci na wewn
ę
trzn
ą
i zewn
ę
trzn
ą
jest zwi
ą
zany z podziałem strumienia
skojarzonego i energii pola:
2
mw
w
w
I
W
2
I
L
=
Ψ
=
2
mz
z
z
I
W
2
I
L
=
Ψ
=
=>
2
I=0
µ
1
1
I
≠
0
µ
2

Podział strumienia na wewn
ę
trzny i zewn
ę
trzny nie zawsze jest mo
ż
liwy, gdy
ż
nie wen
wszystkich przypadkach mo
ż
na wyodr
ę
bni
ć
linie wektora B przenikaj
ą
ce tylko przez jeden
obszar.
Obszary 1 i 3 s
ą
wewn
ę
trzne, 2,4 zewn
ę
trzne. W obszarze 4 nie ma pola
magnetycznego poniewa
ż
I+I’=0 a wi
ę
c B=0.
Indukcyjno
ść
kabla:
Lz
Lw
I
I
I
L
3
2
1
+
=
Ψ
=
Ψ
=
Ψ
=
, gdzie
I
I
L
3
1
w
Ψ
+
Ψ
=
I
L
2
z
Ψ
=
Wówczas gdy nie mo
ż
na całego pola podzieli
ć
na wewn
ę
trzne i zewn
ę
trzne, obliczamy indukcyjno
ść
z pewn
ą
niedokładno
ś
ci
ą
.
35. Poda
ć
i opisa
ć
prawa Kirchhoffa dla obwodów magnetycznych
Zgodnie z prawem przepływu całka liniowa wektora nat
ęż
enia pola magnetycznego H po krzywej
zamkni
ę
tej l równa si
ę
pr
ą
dowi przenikaj
ą
cemu przez powierzchni
ę
ograniczon
ą
t
ą
krzyw
ą
:
∑
∫
α
α
=
I
Hdl
l
Θ
=
∫
lśś
Hdl
W praktyce całka mo
ż
e by
ć
zast
ą
piona sum
ą
iloczynów H
k
*l
k
, gdzie k to numer kolejnego odcinka
obwodu magnetycznego, wzdłu
ż
którego nat
ęż
enie pola magnetycznego H
k
i przenikalno
ść
magnetyczna
µ
k
pozostaj
ą
niezmienne.
m
n
1
k
k
k
F
l
H
=
Θ
=
∑
=
F
m
-siła magnetomotoryczna
Θ
-przepływ pr
ą
du
∑
=
=
n
1
k
mk
m
U
F
, gdzie U
mk
- napi
ę
cie magnetyczne
Prawa Kirhchoffa stosuje si
ę
dla obwodów magnetycznych rozgał
ę
zionych. Dla w
ę
zła obwodu
magnetycznego o b gał
ę
ziach suma algebraiczna strumieni magnetycznych jest równa zeru.
0
b
1
k
k
=
Φ
∑
=
Dla oczka obwodu magnetycznego suma algebraiczna napi
ęć
magnetycznych wszystkich
elementów oczka jest równa sumie algebraicznej sił magnetomotorycznych zawartych w tym
oczku:
∑
∑
=
=
=
n
1
k
mk
n
1
k
k
k
F
l
H
oraz
∑
∑
=
=
Φ
=
n
1
k
k
n
1
k
k
k
l
H
1 I 2 3 4
I’
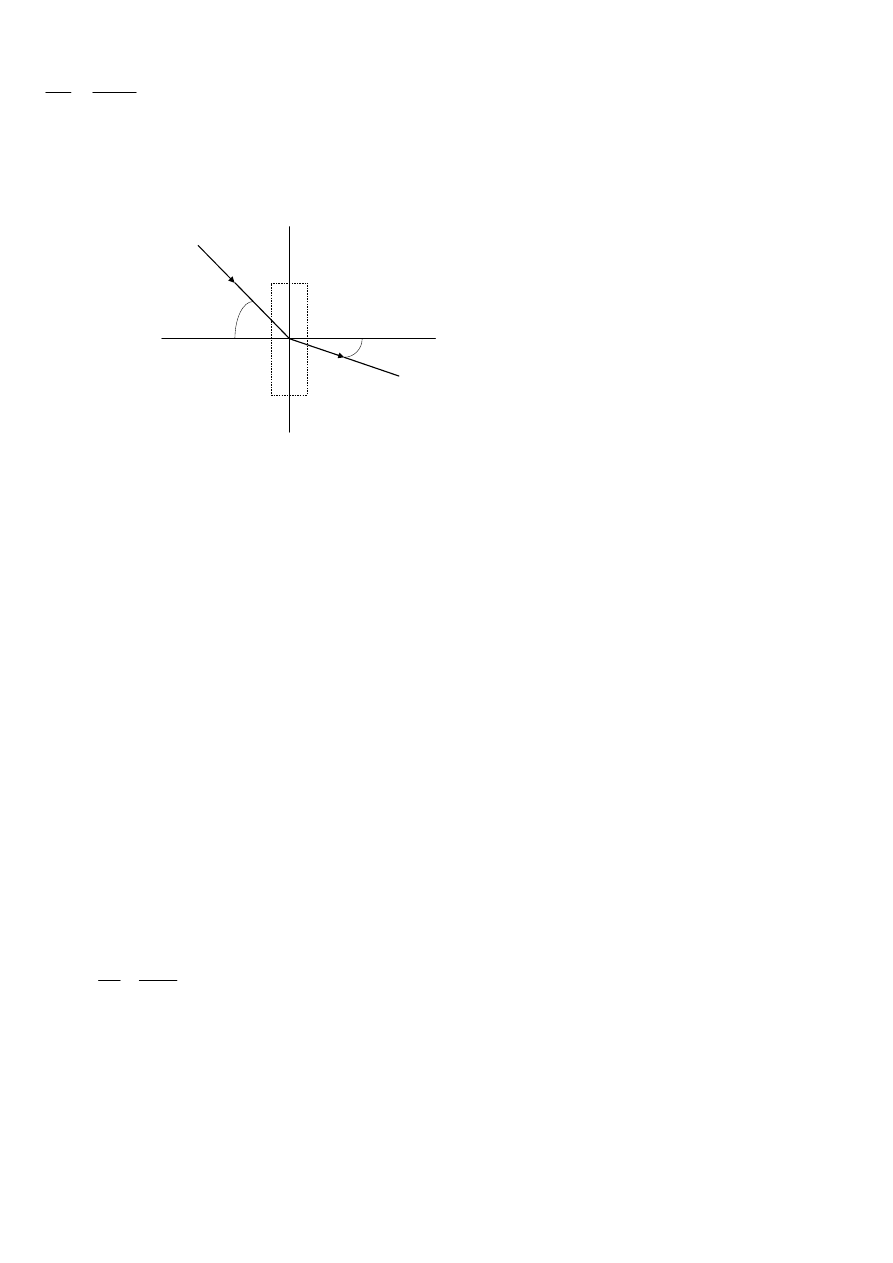
36. Wykaza
ć
ż
e w polu magnetostatycznym na granicy dwóch o
ś
rodków zachodzi zwi
ą
zek
2
1
2
1
tg
tg
α
α
=
µ
µ
Mamy dwa o
ś
rodki w obu jest pole magnetyczne, na granicy o
ś
rodków nast
ę
puje załamanie linii
wektora indukcji i wektora nat
ęż
enia:
Granic
ę
mi
ę
dzy o
ś
rodkami otaczamy dostatecznie małym prostok
ą
tem abcd. W obszarze
bezpr
ą
dowym jest spełnione równanie rotH=-rotgradV
m
=0, które w postaci całkowej ma posta
ć
:
całka(H*dl)=0; V
m
-potencjał skalarny.
Kontur abcd mo
ż
na wybra
ć
tak, aby na odcinkach ab i cd pole było równomierne.
Przy tych zało
ż
eniach równanie całka(H*dl)=0 ma posta
ć
:
H
1
sin
α
1
ab-H
2
sin
α
2
cd=0; H
1
sin
α
1
=H
2
sin
α
2
bo ab=cd
Z tego wynika,
ż
e składowa styczna wektora nat
ęż
enia pola magnetycznego jest ci
ą
gła.
Je
ż
eli na granicy o
ś
rodków wyodr
ę
bnimy prostopadło
ś
cian, w ka
ż
dym punkcie pola magnetycznego
jest spełnione równanie divB=0, posta
ć
całkowa całka(B*ds.)=0.
Zawsze mo
ż
na wybra
ć
tak
ą
dowolnie mał
ą
powierzchni
ę
zamkni
ę
t
ą
,
ż
e wewn
ą
trz pole b
ę
dzie
równomierne. Zakładamy,
ż
e powierzchnie bc i da s
ą
wielokrotnie mniejsze od powierzchni ab i cd.
Poniewa
ż
przez powierzchnie równoległe do płaszczyzny rysunku nie przenika wektor indukcji.
Z postaci całkowej otrzymamy
–B
1
cos
α
1
s+B
2
cos
α
2
s=0
;
B
1
cos
α
1=B
2
cos
α
2
Na tej podstawie stwierdzamy,
ż
e składowa normalna wektora indukcji magnetycznej jest ci
ą
gła.
Dziel
ą
c otrzymane równania otrzymamy:
2
1
2
1
tg
tg
α
α
=
µ
µ
, prawo załamania pola magnetycznego.
B
1
,H
1
B
2
,H
2
µ
1
µ
2
α
1
α
2
b
c
a
d
37. Siła i energia.
Jednym z przejawów istnienia pola magn. jest siła działaj
ą
ca na magnesy trwałe lub przewody z
pr
ą
dem. G
ę
sto
ść
obj. siły działaj
ą
cej w polu magn. na przewód z pr
ą
dem:
B
J
F
×
=
Ω
(ze wzoru Loretza)
po podstawieniu:
dS
dI
J
E
Idl
q
r
=
=
=
0
Siła działaj
ą
ca na element a obj.
Ω
∫
Ω
Ω
×
=
Bd
J
F
Je
ś
li pr
ą
dy s
ą
liniowe to siła działaj
ą
ca:
∫
×
=
l
B
dl
J
F
Energia
G
ę
sto
ść
obj
ę
to
ś
ciowa energii:
2
B
H
W
M
o
=
Gdy
ś
rodowisko izotrobowe:
2
HB
W
M
=
′
Energia zgromadzona w obj.
Ω
Ω
=
Ω
⋅
=
∫
∫
Ω
Ω
d
rotA
H
W
d
B
H
W
M
M
2
1
2
1
Je
ż
eli uwzgl
ę
dnimy
∫
∫
Ω
Ω
Ω
×
−
Ω
=
⋅
−
⋅
≡
×
d
A
H
div
rotHd
A
W
A
rot
H
H
rot
A
A
H
div
M
)
(
)
(
2
1
2
1
zgodnie z tw. Gaussa:
ds
A
H
div
d
A
H
div
s
∫
∫
×
=
Ω
×
Ω
)
(
rozci
ą
gni
ę
te na niesko
ń
czon
ą
ilo
ść
obj. -> 0
Ω
=
∫
Ω
d
rotH
A
W
M
2
1
po uwzgl
ę
dnieniu rów. Maxwella I:
∫
∫
∫
⋅
⋅
=
Ω
⋅
⋅
=
Ω
s
l
M
M
ds
J
dl
A
W
d
J
A
W
2
1
2
1
poniewa
ż
∫
∫
=
⋅
=
s
l
Jds
I
dl
A
φ
wi
ę
c
I
W
M
φ
2
1
=
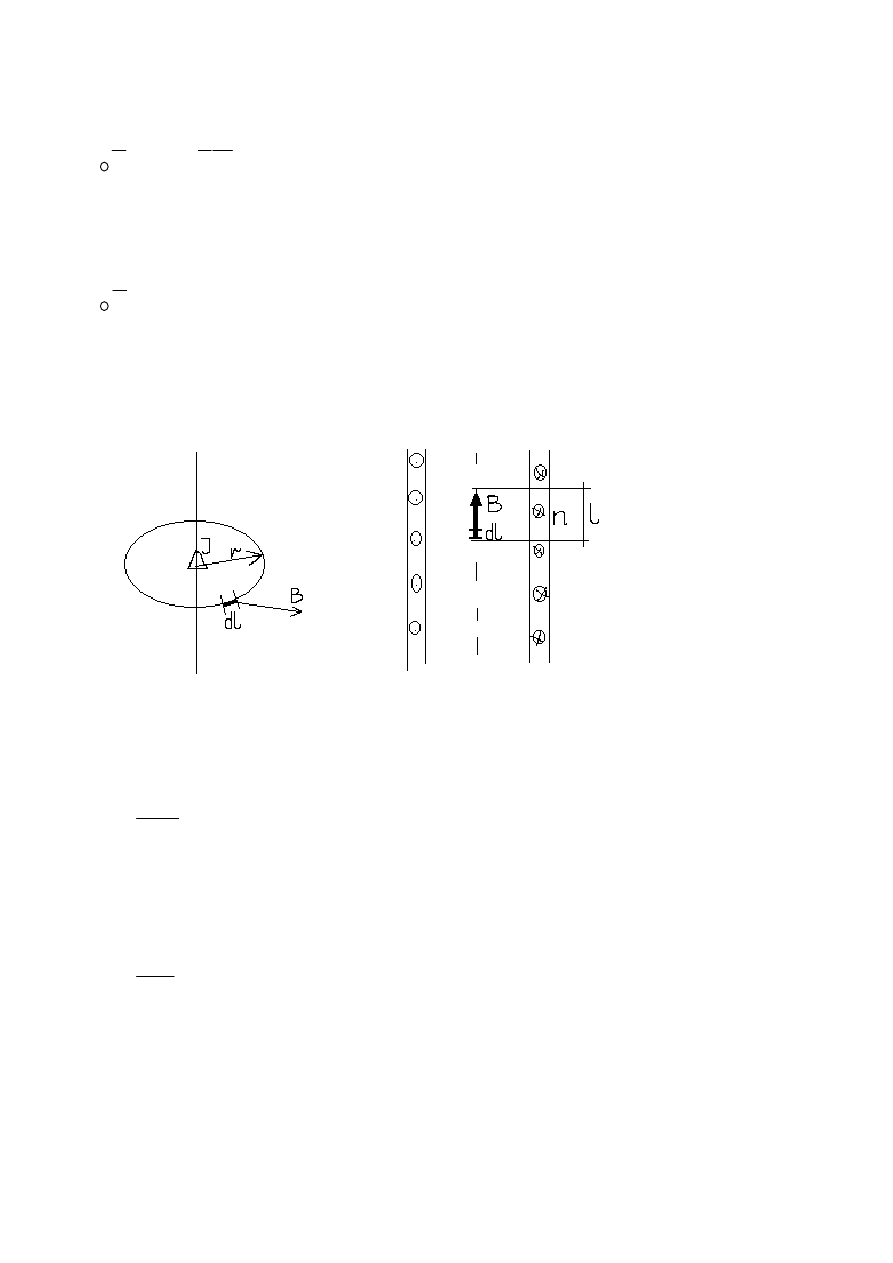
38. Wyznaczanie wektora indukcji magnetycznej.
Wektor indukcji magn. mo
ż
na wyznaczy
ć
na podstawie pierwszego równania Maxwella.
Uwzgl
ę
dniaj
ą
c w nim tw. Stokesa otrzymamy prawo przepływu:
∫
∫
=
s
l
ds
J
dl
B
µ
Je
ś
li kontur całkowania
l
przebiega w ten sposób,
ż
e obejuje on całkowity pr
ą
d
I
, to wzór przybiera
posta
ć
:
I
dl
B
l
µ
=
∫
Mo
ż
na z nich korzysta
ć
w nielicznych przypadkach, bo nie wiadomo, jak
ą
funkcj
ą
współrz
ę
dnych jest
B (tylko wtedy gdy rozkład B na konturze jest okre
ś
lony). Przypadkiem szczególnym jest identyczna
warto
ść
modułu indukcji we wszystkich punktach konturu całkowania.
Dla niesko
ń
czenie długiego przewodu:
r
I
B
I
r
B
Bdl
r
Π
=
=
Π
⋅
=
∫
Π
2
2
2
µ
µ
Dla niesko
ń
czenie długiego solenoidu wykonuje si
ę
obliczenia na odcinku o dowolnej długo
ś
ci l:
l
nI
B
nI
Bl
Bdl
l
µ
µ
=
=
=
∫
, n – liczba zwojów na tym odcinku
41. Zdefiniowa
ć
poj
ę
cia indukcyjno
ść
własna i wzajemna oraz poda
ć
algorytm ich
wyznaczania.
Indukcyjno
ść
własna – Zmiany nat
ęż
enia pr
ą
du w obwodzie powoduj
ą
zmiany nat
ęż
enia pola
magnetycznego tego pr
ą
du czyli pola, w którym znajduje si
ę
obwód.
Indukcyjno
ść
własna zwi
ą
zana z jednym elementem.
2
2
4
I
W
d
d
I
I
M
L
m
k
i
k
i
k
i
=
Ω
Ω
⋅
Π
=
∫∫
Ω
Ω
ψ
=
ψ
1
+
ψ
2
ψ
2
– zewn
ę
trzny strumie
ń
sprz
ęż
ony
ψ
w
– wewn
ę
trzny strumie
ń
L= L
z
+ L
w
dla przewodu cienkiego
W
l
l
L
r
l
d
l
d
M
L
+
⋅
Π
=
∫∫
2
1
12
2
1
4
r
r
Indukcyjno
ść
wzajemna – mi
ę
dzy obwodami.
i
k
ik
ki
ik
I
ki
I
M
M
Ψ
=
Ψ
=
=
ψ
ki
- strumie
ń
sprz
ęż
ony z obwodem k, wytworzony przez pr
ą
d I
i
∫∫
∫∫
Π
=
=
Ω
Ω
⋅
Π
=
=
Ω
Ω
k
i
k
i
l
l
ki
k
i
ki
ik
k
i
ki
i
k
k
i
ki
ik
r
l
d
l
d
M
M
M
d
d
r
I
I
I
I
M
M
M
r
r
r
r
4
1
4
42. Wyznaczy
ć
pole magnetyczne i indukcyjno
ść
przewodów niesko
ń
czenie długich.
Pole magnetyczne układów przewodników z pr
ą
dem mo
ż
na wyznaczy
ć
jedn
ą
z nast
ę
puj
ą
cych
metod:
a) z prawa Amper’a
b) z prawa Biota-Sawarta,
c) z równania Poissona dla wektorowego potencjału magnetycznego.
Pole przewodu prostoliniowego.
Dany jest prostoliniowy przewodnik, przez który płynie pr
ą
d o nat
ęż
eniu I. Indukcj
ę
magnetyczn
ą
w
punkcie odległym od przewodnika o r znajdujemy z prawa Biota-Savarta
rys. Pole przewodnika prostoliniowego znajduje si
ę
z pomoc
ą
prawa Biota-Savarta. Całkowanie po
długo
ś
ci zast
ą
piono całkowaniem po k
ą
tach. Przy niesko
ń
czonej długo
ś
ci k
ą
ty graniczne s
ą
proste.
w którym
µ
oznacza wzgl
ę
dn
ą
przenikalno
ść
magnetyczn
ą
o
ś
rodka. W powietrzu i pró
ż
ni
µ
=1 i prawo
Biota-Savarta powraca do poprzednio poznanej postaci. Oznaczaj
ą
c przez
β
k
ą
t mi
ę
dzy wektorem
ρ
,
ł
ą
cz
ą
cym element pr
ą
du Idl z punktem działania, a przewodnikiem mo
ż
na napisa
ć
2
0
4
sin
πς
β
µ
Idl
dB
=
Przeprowadzamy teraz przez punkt działania płaszczyzn
ę
prostopadł
ą
do przewodnika. K
ą
t
α
mi
ę
dzy
ni
ą
a kierunkiem wektora
ς
spełnia zwi
ą
zek
α
+
β
=
π
/2. St
ą
d
ς
α
ς
β
cos
sin
dl
dl
=
=>
2
0
0
4
πς
ρ
µµ
×
=
Idl
dB
I.
I
dl
r
α
1
α
α
β
ς
d
α
α
2
Iloczyn dlcos
α
jest rzutem elementu dl na kierunek prostopadły do
ς
i mo
ż
na go zast
ą
pi
ć
elementem
łuku
ς
d
α
. St
ą
d
Poza tym
Podstawiaj
ą
c to wszystko do prawa Biota-Savarta i całkuj
ą
c po k
ą
tach
α
, otrzymamy
K
ą
ty
α
1
i
α
2
odpowiadaj
ą
ko
ń
com przewodnika. Dla przewodnika niesko
ń
czenie długiego (czyli dla
punktów bliskich realnego przewodnika)
α
1
=
α
2
=
π
/2, co prowadzi do warto
ś
ci indukcji
i nat
ęż
enia pola
Warunkiem stało
ś
ci indukcji (lub nat
ęż
enia pola) jest r = const. Jest to zarazem równanie linii
pola w płaszczy
ź
nie prostopadłej do przewodnika.
α
ς
α
ς
ς
β
d
d
dl
=
=
sin
α
ς
cos
r
=
( )
[
]
1
2
0
0
sin
sin
4
cos
4
2
1
α
α
π
µ
α
π
µ
α
α
−
−
=
=
∫
−
r
I
r
I
B
r
I
B
π
µ
2
0
=
r
I
H
π
2
=
43. Wyznaczy
ć
potencjał i polemagnetyczne w układzie składaj
ą
cym si
ę
z wydr
ąż
onego walca
ferromagnetycznego.
Wydr
ąż
ony walec o promieniu R, przewodz
ą
cy pr
ą
d i. Układ współrz
ę
dnych walcowych.
Ze wzgl
ę
du na symetri
ę
układu, potencjał wektorowy ma tylko skladow
ą
A
θ
czyli A= l
θ
A
θ
, przy czym
gdzie:
a drog
ą
całkowania jest o
ś
pier
ś
cienia. Liniami pola wektora A s
ą
okr
ę
gi, których
ś
rodki znajduj
ą
si
ę
na osi 0z; przykładem jednej lini pola jest okr
ą
g C.
Poniewa
ż
dl=Rd
θ
, a dl tworzy k
ą
t
θ
z wektorem A, wi
ę
c rzut dl na kierunek tego wektora jest równy
dlcos
θ
, wobec czego:
Wprowadzamy zmienna całkowania
wiec:
po wykonaniu przekształce
ń
otrzymujemy:
=>
∫
=
ρ
π
µ
dl
i
A
4
0
θ
ρ
cos
2
2
2
2
Rr
r
R
z
+
+
+
=
∫
−
+
+
=
=
π
θ
θ
θ
π
µ
2
0
2
2
2
0
0
cos
2
cos
4
Rr
r
R
z
d
Ri
A
A
2
θ
π
ϕ
−
=
1
sin
2
2
cos
)
2
cos(
cos
2
−
=
−
=
−
=
ϕ
ϕ
ϕ
π
θ
ϕ
θ
2
2
2
2
2
sin
1
2
cos
2
k
k
Rr
Rr
r
R
z
−
⋅
=
−
+
+
r
C
z
i
ρ
z
θ
R
gdzie:
Wobec powy
ż
szego:
bowiem funkcja podcałkowa jest parzysta wzgl
ę
dem
ϕ
.
Przy wykorzystaniu to
ż
samo
ś
ci
otrzymujemy w wyniku
gdzie:
2
2
2
)
(
4
r
R
z
Rr
k
+
+
=
ϕ
ϕ
ϕ
π
µ
π
d
k
r
R
k
i
A
∫
−
−
=
2
0
2
2
2
0
sin
1
1
sin
2
2
)
sin
1
2
sin
1
2
(
1
sin
1
1
sin
2
2
2
2
2
2
2
2
ϕ
ϕ
ϕ
ϕ
k
k
k
k
k
k
k
−
−
−
−
=
−
−
−
−
=
E
k
K
k
k
r
R
i
A
2
)
2
(
2
0
π
µ
∫
−
=
2
0
2
2
sin
1
π
ϕ
ϕ
k
d
K
ϕ
ϕ
π
d
k
E
∫
−
=
2
0
2
2
sin
1
44. Scharakteryzowa
ć
własno
ś
ci magnetyczne ciał i opisa
ć
proces magnesowania
ferromagnetyków.
Poza ciałami diamagnetycznymi i paramagnetycznymi istniej
ą
ciała ferromagnetyczne. Przenikalno
ść
magnetyczna ciał ferromagnetycznych zale
ż
y od nat
ęż
enia H pola magnetycznego, czyli od
magnetycznego ciała. Do ciał ferromagnetycznych nale
ż
y
ż
elazo, nikiel, kobalt. W przypadku ciał
ferromagnetycznych wykres funkcji B = f(H) nie jest lini
ą
prost
ą
, wobec czego s
ą
to
ś
rodowiska
nieliniowe. Krzyw
ą
magnesowania lub charakterystyk
ą
magnesowania ciała ferromagnetycznego
nazywamy wykres funkcji B = F(H) otrzymanej przy zwi
ę
kszaniu nat
ęż
enia H od zera w przypadku,
gdy materiał nie był uprzednio magnesowany. Typow
ą
posta
ć
krzywej magnesowania ciał
ferromagnetycznych przedstawia rysunek.
Pocz
ą
tkowy przebieg krzywej magnesowania jest w przybli
ż
eniu prostoliniowy. Nast
ę
pnie wyst
ę
puje
zakrzywienie, zwane kolanem krzywej magnesowania. Po przekroczeniu nat
ęż
enia H
1
poza
kolanem, krzywa krzywa magnesowania podnosi si
ę
do góry bardzo wolno, wobec czego du
ż
y
wzrost nat
ęż
enia pola magnetycznego powoduje jedynie nieznaczny wzrost indukcji magnetycznej B;
mówimy wówczas,
ż
e osi
ą
gni
ę
ty został stan nasycenia magnetycznego.
Rozpatrzmy cewk
ę
maj
ą
c
ą
z zwojów nawini
ę
tych na rdzeniu wykonanym z materiału
ferromagnetycznego o postaci jak na rysunku. Nat
ęż
enie H pola magnetycznego w rdzeniu jest
proporcjonalne do pr
ą
du i w uzwojeniu, wobec czego zmieniaj
ą
c pr
ą
d i powodujemy zmian
ę
nat
ęż
enia H. Przypu
ść
my,
ż
e rdze
ń
nie był uprzednio magnesowany, a wi
ę
c nie ma tzw. Przeszło
ś
ci
magnetycznej.
=>

Przy zmianie pr
ą
du i od 0 do pewnej warto
ś
ci i
max
net
ęż
enie H w rdzeniu zmienia si
ę
od 0 do warto
ś
ci
H
max
, a indukcja B zmienia si
ę
według odcinka 1 krzywej magnesowania. Przy zmniejszaniu
nat
ęż
enia H od H
max
do –H
max
indukcja magnetyczna B zmienia si
ę
według krzywej 2, której górna
cz
ęść
przebiega nad odcinkiem 1 krzywej magnesowania. Gdy z kolei nat
ęż
enie H wzrasta od –H
max
do +H
max
, wówczas indukcja B zmienia si
ę
według krzywej 3, której cz
ęść
górna przebiega poni
ż
ej
odcinka 1 krzywej magnesowania. Krzywa z rysunku powy
ż
ej zło
ż
ona z gał
ę
zi 2 i 3 nazywa si
ę
p
ę
tl
ą
histerezy. Lew
ą
gał
ąź
p
ę
tli histerezy wykorzystuje si
ę
przy zmniejszaniu nat
ęż
enia H od +H
max
do
-H
max
, a praw
ą
gał
ąź
3 – przy zwi
ę
kszaniu H od –H
max
do +H
max
.
Zjawisko wyst
ę
puj
ą
ce przy przemagnesowywaniu ciał ferromagnetycznych nazywa si
ę
histerez
ą
magnetyczn
ą
. Histereza magnetyczna jest wynikiem zjawisk zachodz
ą
cych w skupiskach
krystalicznych ciał ferromagnetycznych.
Z powy
ż
szego rysunku widzimy,
ż
e w punkcie A gał
ę
zi 2 w p
ę
tli histerezy w ciele istnieje indukcja B
0
przy nat
ęż
eniu H=0. Chocia
ż
nat
ęż
enie pola magnetycznego równa si
ę
zeru to jednak indukcja B jest
ró
ż
na od zera, a wi
ę
c w ciele istnieje strumie
ń
magnetyczny. Wielko
ść
B
0
nazywamy indukcj
ą
szcz
ą
tkow
ą
. W celu zniszczenia strumienia magnetycznego spowodowanego przez indukcj
ę
szcz
ą
tkow
ą
nale
ż
y zmieni
ć
kierunek linii pola magnetycznego, czyli nale
ż
y zmieni
ć
zwrot pr
ą
du w
cewce. Z rysunku widzimy,
ż
e indukcja B=0, gdy nat
ęż
enie H = -H
k
=OC , wielko
ść
H
k
nazywamy
koercj
ą
.
Z du
żą
dokładno
ś
ci
ą
mo
ż
na przyj
ąć
,
ż
e p
ę
tla histerezy jest symetryczna wzgl
ę
dem pocz
ą
tku układu
współrz
ę
dnych. W zwi
ą
zku z tym OA=OD oraz OC=OE.
Ciało magnetyczne twarde maj
ą
szerok
ą
p
ę
tle histerezy tzn. posiadaj
ą
du
żą
koercj
ę
H
k
. Natomiast
ciała magnetycznie mi
ę
kkie maj
ą
w
ą
sk
ą
p
ę
tle histerezy czyli posiadaj
ą
mał
ą
koercj
ę
. Na ogół ciała
mi
ę
kkie magnetyczne s
ą
łatwiej magnesowalne, a indukcja magnetyczna w stanie nasycenia jest
wi
ę
ksza dla tych ciał ni
ż
dla ciał twardych magnetycznie. Gdy p
ę
tla histerezy jest dostatecznie
w
ą
ska, wówczas w obliczeniach mo
ż
na pomin
ąć
zjawisko histerezy magnetycznej, posługuj
ą
c si
ę
jedynie krzyw
ą
magnesowania.
Materiały magnetycznie mi
ę
kkie to min – stopy
ż
elaza: permaloj, superpermaloj.
Konduktancja tych ciał jest niewielka i dlatego powstaj
ą
pr
ą
dy wirowe czyli s
ą
dodatkowe straty.
Materiały magnetycznie twarde to mi
ę
dzy innymi: stal chromowa, kobaltowa.
Rozmagesowanie magnesów - diamagnetyzacja mo
ż
emy przprowadzi
ć
poprzez:
-
podgrzewamy materiał magnetyczny do temperatury Curie – wtedy ferromagnetyk staje si
ę
paramagnetykiem.
Z reguły temperatura Cuire jest wy
ż
sza ni
ż
100
0
C.
-
działamy zmiennym polem magnetycznym.

45. Algorytm wyznaczania pola magnetycznego we wn
ę
trzu cewki solenoidalnej
Na rdzeniu w kształ
ć
ie walca lub graniastosłupa nawini
ę
to równomiernie uzwojenie zawieraj
ą
ce z
zwojów, w którym płynie pr
ą
d i.Gdy długo
ść
l cewki jest dostatecznie du
ż
a wówczas mo
ż
na przyj
ąć
,
ż
e w jej wn
ę
trzu pole magnetyczne jest równomierne.Jako drog
ę
całkowania przy stosowaniu prawa
przepływu przyjmiemy lini
ę
ABCA.Powierzchni
ę
o krzywej brzegowej ABCA przenika z zwojów
przewodz
ą
cych pr
ą
d i, wobec czego przepływ przez t
ę
powierzchni
ę
jest równy amperozwojom
i
ż
,mamy zatem
czyli
W obszarze na zewn
ą
trz cewki pole magnetyczne jest bardzo słabe w porównaniu z polem w jej
wn
ę
trzu.Wskutek tego nie popełnia si
ę
du
ż
ego bł
ę
du ,gdy w powy
ż
szym wyra
ż
eniu pominie si
ę
całke
Otrzymujemy zatem w przybli
ż
eniu
Ppomijaj
ą
c zniekształcenia pola magnetycznego w obszarze blisko kra
ń
ców cewki,mamy
Wobec czego nat
ęż
enie pola magnetycznego w dowolnym punk
ć
ie obszaru wewn
ę
trznego cewki
wyra
ż
a
ś
i
ę
wzorem
46. Opisa
ć
zjawisko indukcji elektromagnetycznej.
Prawo indukcji elektromagnetycznej opisuje prawidłowo
ś
ci, przy której w pewnych warunkach pole
magnetyczne wywołuje napi
ę
cie a zatem i pr
ą
d elektryczny. Zjawisko powstawania (indukowania) w
przewodach elektrycznych napi
ę
cia elektrycznego w przypadku ruchu tych przewodów w polu
magnetycznym odkrył Faraday w 1831. Zjawisko indukcji elektromagnetycznej wyst
ę
puje niezale
ż
nie
od tego, w jakich okoliczno
ś
ciach i z jakich przyczyn nast
ę
puje zmiana strumienia sprz
ęż
onego ze
zwojem. Zmiany te mog
ą
odbywa
ć
si
ę
np. przez wł
ą
czenie albo wył
ą
czenie pr
ą
du stałego lub przez
periodyczne zmiany pr
ą
du zmiennego. Mo
ż
liwe jest równie
ż
indukowanie napi
ę
cia przez stałe w
czasie pole magnetyczne , ale przewody musz
ą
porusza
ć
si
ę
w tym polu, aby spowodowa
ć
konieczn
ą
do przebiegu zjawiska zmian
ę
strumienia magnetycznego. Napi
ę
cie indukowane mo
ż
e
by
ć
zatem wytwarzane nast
ę
puj
ą
co:
a) w nieruchomych przewodach przez zmienne w czasie pole magnetyczne
b) w ruchomych przewodach przez stałe w czasie pole magnetyczne lub przez nało
ż
enie si
ę
obu
wymienionych form zjawiska
c) w ruchomych przewodach przez zmienne w czasie pole magnetyczne
∫
=
ABCA
z
i
Hdl
∫
∫
=
+
AB
BCA
zi
Hdl
Hdl
∫
BCA
Hdl
∫
=
AB
iz
Hdl
∫
=
AB
Hl
Hdl
l
i
H
z
=
47. Poda
ć
i scharakteryzowa
ć
prawo Ohma oraz prawa Kirchhoffa dla obwodów
magnetycznych
Zgodnie z prawem przepływu całka liniowa wektora nat
ęż
enia pola magnetycznego H po krzywej
zamkni
ę
tej l równa si
ę
pr
ą
dowi przenikaj
ą
cemu przez powierzchni
ę
ograniczon
ą
t
ą
krzyw
ą
:
∑
∫
α
α
=
I
Hdl
l
Θ
=
∫
lśś
Hdl
W praktyce całka mo
ż
e by
ć
zast
ą
piona sum
ą
iloczynów H
k
*l
k
, gdzie k to numer kolejnego odcinka
obwodu magnetycznego, wzdłu
ż
którego nat
ęż
enie pola magnetycznego H
k
i przenikalno
ść
magnetyczna
µ
k
pozostaj
ą
niezmienne.
m
n
1
k
k
k
F
l
H
=
Θ
=
∑
=
F
m
-siła magnetomotoryczna
Θ
-przepływ pr
ą
du
∑
=
=
n
1
k
mk
m
U
F
, gdzie U
mk
- napi
ę
cie magnetyczne
Prawo Ohma:
∑
∑
=
Θ
=
φ
mk
m
mk
R
F
R
, gdzie
k
k
k
mk
s
l
R
⋅
µ
=
opór magnetyczny
Prawa Kirhchoffa stosuje si
ę
dla obwodów magnetycznych rozgał
ę
zionych. Dla w
ę
zła obwodu
magnetycznego o b gał
ę
ziach suma algebraiczna strumieni magnetycznych jest równa zeru.
0
b
1
k
k
=
Φ
∑
=
Dla oczka obwodu magnetycznego suma algebraiczna napi
ęć
magnetycznych wszystkich
elementów oczka jest równa sumie algebraicznej sił magnetomotorycznych zawartych w tym
oczku:
∑
∑
=
=
=
n
1
k
mk
n
1
k
k
k
F
l
H
oraz
∑
∑
=
=
Φ
=
n
1
k
k
n
1
k
k
k
l
H
48. Fala płaska – definicja, charakterystyka.
Fala – zmiana stanu fizycznego
ś
rodowiska na skutek miejscowego zaburzenia
Fala bie
żą
ca płaska – własno
ś
ci opisywane s
ą
zale
ż
no
ś
ciami od jednej współrz
ę
dnej wzi
ę
tej w
kierunku propagacji fali.
Fala elektromagnetyczna – wywołuje zjawiska elektryczne oraz magnetyczne (f. poprzeczna)
Je
ż
eli zaburzenie rozchodzi si
ę
tylko w jednym kierunku, fala jest nazywana fal
ą
płask
ą
. W
danej chwili we wszystkich punktach dowolnie wybranej płaszczyzny prostopadłej do
kierunku rozchodzenia si
ę
fali warunki s
ą
takie same. Powierzchnie falowe s
ą
płaszczyznami,
a promienie fali liniami prostymi równoległymi do siebie.
t
)
t
,
z
(
E
z
)
t
,
z
(
H
x
y
∂
∂
ε
=
∂
∂
−
, I równanie Maxwella
t
)
t
,
z
(
H
z
)
t
,
z
(
E
y
x
∂
∂
µ
−
=
∂
∂
, II równanie Maxwella
2
x
2
2
2
x
2
t
)
t
,
z
(
E
1
z
)
t
,
z
(
E
∂
∂
ν
=
∂
∂
, jednorodne skalarne równanie falowe
Dla fali odbitej: E
x
(z,t)=E
φ
x
(z-
υ
t)+E
ϕ
x
(z+
υ
t)
Bez odbicia: E
x
(z,t)=E
xm
sin(
ω
t+
ϕ
)=E
xm
cos
ω
(t-z/
υ
)
x
E
H
49. Opisa
ć
zjawisko wnikania fali elektromagnetycznej do przewodnika
Gł
ę
boko
ść
wnikania fali elektromagnetycznej.
Fala płaska padaj
ą
ca na powierzchni
ę
ś
rodowiska przewodz
ą
cego cz
ęś
ciowo wnika do wn
ę
trza tego
ś
rodowiska , ulegaj
ą
c silnemu tłumieniu . Intensywno
ść
tłumienia fali przesuwaj
ą
cej si
ę
w
ś
rodowisku
przewodz
ą
cym charakteryzuje si
ę
gł
ę
boko
ś
ci
ą
wnikania fali elektromagnetycznej , równej odległo
ś
ci ,
wzdłu
ż
której amplituda fali maleje e
≅
2,718 razy.
E
x2
= E
p2
e
-
α
∆
∆
- gł
ę
boko
ść
wnikania fali
2
ϖµγ
α
=
- stała tłumienia
µ
,
γ
- przenikalno
ść
, konduktywno
ść
Z okre
ś
lenia gł
ę
boko
ś
ci wnikania wynika
1
2
2
−
=
e
E
E
p
x
st
ą
d
1
=
∆
α
ωµγ
α
2
1
=
=
∆
Gł
ę
boko
ść
wnikania fali elektromagnetycznej zale
ż
y od cz
ę
stotliwo
ś
ci oraz od przenikalno
ś
ci
magnetycznej i konduktywno
ś
ci
ś
rodowiska magnetycznego.
W odległo
ś
ci
∆
od powierzchni granicznej amplituda fali malej
ą
cej do 36,8
%
warto
ś
ci pocz
ą
tkowej na
powierzchni granicznej. W odległo
ś
ci 5
∆
od powierzchni granicznej fala praktycznie zanika ,
przybieraj
ą
c warto
ś
ci mniejsze od 1
%
w stosunku do powierzchni granicznej.
50. Wyprowadzi
ć
zale
ż
no
ś
ci opisuj
ą
ce wektor Poyntinga.
Wektor
H
E
×
nazywa si
ę
wektorem Poyntinga. Całka powierzchniowa
[
]
∫
⋅
×
S
dS
H
E
jest strumieniem
wektora Poyntinga przez powierzchni
ę
S i przedstawia moc. Strumie
ń
wektora Poyntinga przez
powierzchni
ę
S nazywany jest cz
ę
sto strumieniem mocy lub moc
ą
wypromieniowan
ą
przez t
ę
powierzchni
ę
, a warto
ść
liczbowa wektora Poyntinga – g
ę
sto
ś
ci
ą
powierzchniow
ą
strumienia mocy.
Całka
[
]
( )
∫
ν
⋅
×
S
dS
H
E
przedstawia moc wypromieniowan
ą
przez granic
ę
obszaru v. Wyprowadzenie:
t
H
H
E
rot
H
t
E
E
J
E
H
rot
E
E
/
t
E
E
J
H
rot
∂
∂
⋅
µ
−
=
⋅
∂
∂
⋅
ε
+
⋅
=
⋅
⋅
∂
∂
+
=
po odj
ę
ciu stronami
t
H
H
t
E
E
J
E
E
rot
H
H
rot
E
∂
∂
⋅
µ
+
∂
∂
⋅
ε
+
⋅
=
⋅
−
⋅
=>
przy uwzgl
ę
dnieniu to
ż
samo
ś
ci wektorowej
[
]
[
]
t
H
H
t
E
E
J
E
H
E
div
H
rot
E
E
rot
H
H
E
div
∂
∂
⋅
µ
+
∂
∂
⋅
ε
+
⋅
=
×
−
⋅
−
⋅
=
×
całkujemy w obszarze v
[
]
dv
t
H
H
t
E
E
dv
J
E
dv
H
E
div
∫
∫
∫
ν
ν
ν
∂
∂
⋅
µ
+
∂
∂
⋅
ε
+
⋅
=
×
−
na mocy twierdzenia Gaussa-Ostrogradskiego
[
]
[
]
( )
∫
∫
ν
ν
⋅
×
=
×
S
dS
H
E
dv
H
E
div
gdzie S(v) – powierzchnia ograniczaj
ą
ca obszar v, wektor dS skierowany jest na zewn
ą
trz tej
powierzchni
[
]
( )
dv
t
H
H
t
E
E
dv
J
E
dS
H
E
S
∫
∫
∫
ν
ν
ν
∂
∂
⋅
µ
+
∂
∂
⋅
ε
+
⋅
=
⋅
×
−
(1)
Przypu
ść
my,
ż
e w cz
ęś
ci obszaru v wytwarzana jest energia elektryczna kosztem innej postaci
energii, na przykład znajduj
ą
si
ę
w nim
ź
ródła energii elektrycznej. Wówczas:
[
]
n
E
E
J
+
γ
=
gdzie E
n
– nat
ęż
enie narzuconego pola elektrycznego, wywołanego działaniem czynników obcych w
stosunku do pola elektromagnetycznego. W cz
ęś
ci obszaru, gdzie nie wyst
ę
puje zjawisko
wytwarzania energii elektrycznej mamy E
n
=0.
(
)
µ
∂
∂
=
∂
∂
⋅
µ
ε
∂
∂
=
∂
∂
⋅
ε
∂
∂
⋅
ε
+
⋅
∂
∂
ε
=
⋅
∂
∂
ε
=
ε
∂
∂
⋅
−
γ
=
⋅
−
γ
=
2
2
2
n
2
n
H
2
1
t
t
H
H
E
2
1
t
t
E
E
t
E
E
2
1
E
t
E
2
1
E
E
t
2
1
E
2
1
t
J
E
J
1
J
E
E
J
E
Po podstawieniu do (1):
[
]
( )
∫
∫
∫
∫
ν
ν
ν
ν
⋅
×
+
µ
+
ε
∂
∂
+
γ
=
⋅
S
2
2
2
n
dS
H
E
dv
H
2
1
E
2
1
t
dv
J
1
dv
J
E
(2)
[
]
( )
µ
+
ε
∂
∂
+
γ
−
⋅
=
⋅
×
∫
∫
∫
∫
ν
ν
ν
ν
dv
H
2
1
E
2
1
t
dv
J
1
dv
J
E
dS
H
E
2
2
2
n
S
gdzie:
∫
ν
⋅
dv
J
E
n
przedstawia moc elektryczn
ą
wytworzon
ą
w obszarze v.
∫
ν
γ
dv
J
1
2
przedstawia moc
przetworzon
ą
na ciepło w obszarze v.
∫
ν
µ
+
ε
∂
∂
dv
H
2
1
E
2
1
t
2
2
pochodna cxzasowa energii,
przedstawia moc pola elektromagnetycznego zwi
ą
zan
ą
z obszarem v.
Na podstawie wzoru (2) otrzymujemy twierdzenie Poyntinga: moc wytworzona w pewnym obszarze
jest równa sumie mocy przetwarzanej na ciepło, mocy pola magnetycznego w obszarze v oraz mocy
wypromieniowanej przez granic
ę
tego obszaru. Twierdzenie Poyntinga wyra
ż
a zatem prawo
zachowania energii w polu elektromagnetycznym.
51. Równania pola elektromagnetycznego w
ś
rodowisku przewodz
ą
cym.
W tych warunkach dopuszczalne jest pomini
ę
cie pr
ą
dów przesuni
ę
cia. Stosuje si
ę
dlatego równania
Maxwella w postaci zespolonej.
H
j
E
rot
E
H
rot
ωµ
−
=
γ
=
Przyjmujemy,
ż
e
γ
µ
,
s
ą
stałe.
Potencjał wektorowy harmonicznego pola elektromagnetycznego spełnia niejednorodne równanie
Helmholtza.
n
2
2
J
A
k
A
µ
−
=
−
∇
gdzie
n
J
oznacza g
ę
sto
ść
pr
ą
du narzuconego, za
ś
π
ωµγ
=
ωµγ
=
4
j
exp
j
k
Potencjał skalarny pola wyra
ż
a si
ę
wzorem
A
div
1
V
µγ
−
=
Nat
ęż
enie pola elektrycznego jest równe
st
i
E
E
E
+
=
przy czym
V
grad
E
A
j
E
st
i
−
=
ω
−
=
przedstawiaj
ą
odpowiednio nat
ęż
enie indukowanego i statycznego pola elektrycznego. Zawsze
0
A
div
=
w obszarze
ś
rodowiska przewodz
ą
cego, wobec czego
0
V
=
w tym obszarze. Nat
ęż
enie
pola elektrycznego
E
równa si
ę
nat
ęż
eniu
i
E
indukowanego pola elektrycznego.
Nat
ęż
enie pola magnetycznego wyra
ż
a si
ę
wzorem
A
rot
1
H
rot
µ
=
52. Zdefiniowa
ć
i opisa
ć
poj
ę
cie impedancji falowej przewodnika.
Impedancj
ą
falow
ą
ρ
nazywamy reaktancje indukkcyjn
ą
lub reaktancj
ę
pojemno
ś
ciow
ą
obwodu przy
cz
ę
stotliwo
ś
ci rezonansowej.
C
L
C
L
r
r
=
=
=
ω
ω
ρ
1
53. Poda
ć
ró
ż
nic
ę
mi
ę
dzy impedancj
ą
falow
ą
w dielektryku i przewodniku i oblicczy
ć
jej
obliczy
ć
warto
ść
dla powietrza.
W dielektryku impedancja falowa przedstawia sie wzorem:
ε
µ
=
f
Z
[
Ω
]. Jest to iloraz warto
ś
ci
zespolonych E
d
i H
Ψ
:
ε
µ
ϖε
=
=
Ψ
j
k
H
E
d
. Impedancj
ę
falow
ą
dielektryka o wzgl
ę
dnych
przenikalno
ś
ciach elektrycznej
ε
r
i magnetycznej
µ
r
mozna przedstawi
ć
w postaci wzoru: Z
fp
= 120
Π≈
377[
Ω
]. Impedancja falowa przewodnika wynosi:
ϖε
γ
ϖµ
j
j
Z
f
+
=
[
Ω
]. Zale
ż
y ona od pulsacji pola
elektromagnetycznego
ϖ
, oraz konduktywno
ś
ci o
ś
rodka. Jest ona liczb
ą
zespolon
ą
, co prowadzi do
opó
ź
nienia w fazie wektora H wzgl
ę
dem fali E. W skutek tego fala elektromagnetyczna jest
gwałtownie tłumiona w przewodniku.

58. Scharakteryzowa
ć
pole elektromagnetyczne w strefie dalekiej
Obszar daleki: |x|r>>1, czyli r>>
λ
/2
π
. Badamy zatem pole elmagn. W du
ż
ych odległo
ś
ciach od
wibratora w porównaniu z długo
ś
ci
ą
fali. Przy du
ż
ych cz
ę
stotliwo
ś
ciach obszar ten zaczyna si
ę
ju
ż
w
niedu
ż
ej odległo
ś
ci od wibratora; np. przy f=10
8
Hz długo
ść
fali elmagn. W pró
ż
ni:
m
f
c
3
10
10
3
8
8
=
⋅
=
=
λ
wobec tego obszar daleki zaczyna si
ę
ju
ż
w odległo
ś
ci kilkunastu metrów od wibratora. W obszarze
dalekim wyst
ę
puj
ą
zjawiska falowe. Z tego powodu obszar daleki nazywany jest równie
ż
stref
ą
falow
ą
. Wektory E i H w obsz. dalekim maj
ą
tylko po jednej składowej:
+
+
−
⋅
=
+
+
−
⋅
=
2
|
|
sin
4
sin
|
|
2
2
|
|
sin
4
sin
|
|
2
2
π
ϕ
ω
πωε
θ
π
ϕ
ω
π
θ
i
t
i
t
r
k
t
r
k
l
I
E
r
k
t
r
k
l
I
H
Pr
ę
dko
ść
tych fal obliczamy ró
ż
niczkuj
ą
c wzgl
ę
dem czasu równanie:
const
r
k
t
i
=
+
+
−
2
|
|
π
ϕ
ω
i otrzymujemy
v=
ω
/|k|=1/sqrt(
εµ
)
Iloraz warto
ś
ci chwilowych
E
t
/H
t
=sqrt(
µ
/
ε
)
jest równy impedancji falowej.
Z zale
ż
no
ś
ci:
ε
E
2
=
µ
H
2
wynika,
ż
e w dowolnej chwili g
ę
sto
ś
ci pola elektrycznego i magnetycznego s
ą
jednakowe w ka
ż
dym
punkcie strefy falowej, czyli w jednostce obj
ę
to
ś
ci zawarta jest taka sama energia pola elektrycznego
i magnetycznego. Oznacza to,
ż
e połowa energii fali zawarta jest w polu elektrycznym, a druga
połowa w polu magnetycznym.
59. Opisa
ć
zjawisko wnikania fali elektromagnetycznej do przewodnika.
Fala płaska padaj
ą
ca na powierzchni
ę
ś
rodowiska przewodz
ą
cego cz
ęś
ciowo wnika do jego wn
ę
trza,
ulegaj
ą
c silnemu tłumieniu. Intensywno
ść
tłumienia fali przesuwaj
ą
cej si
ę
w
ś
rod. przewodz
ą
cym
charakteryzuje si
ę
gł
ę
boko
ś
ci
ą
wnikania fali elmagn. Równej odległo
ś
ci, wzdłu
ż
której fala malej
e=2,72 razy.
Gł
ę
boko
ść
wnikania fali elmagn.
∆
zale
ż
y od cz
ę
stotl, przenikalno
ś
ci magnet.
µ
oraz konduktywno
ś
ci
ś
rodowiska elmagn
γ
.
ωµγ
2
=
∆
. Wraz ze zwi
ę
kszaniem si
ę
odległo
ś
ci od pow. granicznej
amplituda fali maleje i praktycznie zanika w odl.
5
∆
.
60. Zjawisko naskórkowe
Z tłumieniem fali elektromagnetycznej w przewodniku zwi
ą
zane jest zjawisko naskórkowe.
Zjawisko naskórkowe polega na tym,
ż
e przy przepływie pr
ą
du przemiennego przez przewodnik
g
ę
sto
ść
pr
ą
du jest w całym przekroju nierównomierna, przy czym ma najwi
ę
ksz
ą
warto
ść
przy
powierzchni zewn
ę
trznej przewodnika.
Przyczyn
ą
zjawiska naskórkowego jest fakt,
ż
e fala elektromagnetyczna, wytworzona w
otaczaj
ą
cym dany przewodnik
ś
rodowisku dielektrycznym na skutek pr
ą
du płyn
ą
cego w
przewodniku, wnika przez powierzchni
ę
zewn
ę
trzn
ą
przewodnika do jego wn
ę
trza i tu jest silnie
tłumiona.
Rys. 28.18. Zjawisko naskórkowe w szynie płaskiej: a) przekrój szyny; b) amplitudy J, E, w funkcji
x; c) amplituda H, w funkcji x
Rozpatrzmy szyn
ę
o przekroju prostok
ą
tnym (rys. 28.18), przez któr
ą
płynie pr
ą
d /. O
ś
y układu
współrz
ę
dnych przyj
ę
to w kierunku długo
ś
ci szyny, o
ś
z w
ś
rodku przekroju szyny równolegle do
wysoko
ś
ci h, os x -w kierunku propagacji fali elektromagnetycznej. Je
ż
eli wysoko
ść
szyny jest
wielokrotnie wi
ę
ksza od jej grubo
ś
ci b (h
b), to mo
ż
na w przybli
ż
eniu traktowa
ć
powierzchnie
boczne szyny jako dwie du
ż
e płaszczyzny.
Zastosujemy równanie
H
x
H
2
2
2
∇
=
∂
∂
sk
ą
d otrzymamy:
2
b
sh
x
2
∇
∇
−
=
γ
sh
h
I
H
2
b
sh
x
1
∇
∇
∇
=
−
=
ch
dx
dH
E
γ
γ
Orientacyjny rozkład g
ę
sto
ś
ci pr
ą
du podano na rys wy
ż
ej.
Zjawisko naskórkowe wyst
ę
puje równie
ż
przy przepływie pr
ą
du przez przewody o przekroju
kołowym.
Nierównomierna g
ę
sto
ść
pr
ą
du jest powodem silniejszego nagrzewania si
ę
przewodników ni
ż
przy
g
ę
sto
ś
ci równomiernej. Rezystancja przewodu przy pr
ą
dzie przemiennym jest wi
ę
ksza ni
ż
przy
pr
ą
dzie stałym.
Im wi
ę
ksza jest konduktywno
ść
γ
przy danej przenikalno
ś
ci magnetycznej
µ
i cz
ę
stotliwo
ś
ci
ω
tym
mniejsza jest długo
ść
fali i gł
ę
boko
ść
jej wnikania
Fala elektromagnetyczna nie wnika w nadprzewodnik’ lecz odbija si
ę
od niego.
61. Dokona
ć
analizy rozkładu indukcji elektromagnetycznej w blasze transformatorowej.
Magnetowody magnetycznego strumienia przemiennego wykonuje si
ę
z pakietów izolowanych blach
ferromagnetycznych w celu zmniejszenia strat mocy na pr
ą
du wirowe. Magnetowody stosowane dla
pól magnetycznych o cz
ę
stotliwo
ś
ci 50 Hz składaj
ą
si
ę
z blach o grubo
ś
ci d = 0,1 - 0,5 mm.
Aby upro
ś
ci
ć
rozwa
ż
ania przyjmiemy,
ż
e przenikalno
ść
blachy jest stała (u. = const).Wektor
g
ę
sto
ś
ci pr
ą
dów wirowych w blasze wyznacza si
ę
korzystaj
ą
c z pierwszego równania Maxwella:
J
m
= J
sm
sinh
∝
x
Bmmed/B0m
Bm/B0m
Wyszukiwarka
Podobne podstrony:
Microsoft Word L22 elementy teorii pola wektorowego
Urbański P Geometryczne podstawy teorii pola
Wprowadzenie do klasycznej teorii pola
E Schmutzer Podstawowe zasady mechaniki klasycznej i klasycznej teorii pola
Elementy teorii pola
rzepka, podstawy teorii pola elektromagnetycznego,test
Baza pytań na test z teorii pola cz2
Microsoft Word W22 Elementy teorii pola wektorowego
Odpowiedzi do teorii
Pytania i odpowiedzi, Zagadnienia - teoria rynku, ZASTOSOWANIE TEORII RYNKU
egzamin z teorii pielęgniarstwa z odpowiedziami (1), Pielęgniarstwo- magisterka cm umk, I rok, Teori
Odpowiedzi do Teorii przedsiebiorstwa
egzamin z teorii pielęgniarstwa z odpowiedziami (2), Pielęgniarstwo- magisterka cm umk, I rok, Teori
egzam odpowiedzi, Politechnika Lubelska, Studia, Studia, sem IV, teoria pola, Teoria Pola
Odpowiedzialność biznesu wstęp do teorii
Podstawy Teorii Okrętów Pytania i Odpowiedzi
Odpowiedzi do pytań z egzaminu ustnego ze Wstępu do Logiki i Teorii Mnogości
więcej podobnych podstron