
1
Wykład 4
MECHANIKA TEORETYCZNA
Studia stacjonarne I stopnia – rok akademicki 2011/12
Autor:
Henryk Laskowski
Katedra Podstaw Mechaniki Ośrodków Ciągłych
Instytut Mechaniki Budowli
Wydział Inżynierii Lądowej
REDUKCJA DO NAJPROSTSZEJ POSTACI
PŁASKI I RÓWNOLEGŁY UKŁAD SIŁ

Część 1
REDUKCJA DO NAJPROSTSZEJ POSTACI
cd.
3
1.1. Twierdzenie o zmianie bieguna - cd
Wniosek 4
Jeżeli punkt redukcji przemieszcza się po prostej równoległej do sumy to
moment układu względem tego punktu nie ulega zmianie
Z: Wektor OO’ || S
T: Moment układu
nie ulega zmianie
O
O'
M
M
D:
OO'||S
O'
O
O'
O
M
M
S
OO'
M
M
n
A
2
F
1
A
i
A
2
A
i
F
1
F
n
F
O
O'
S
O'
M
S
O
M
4
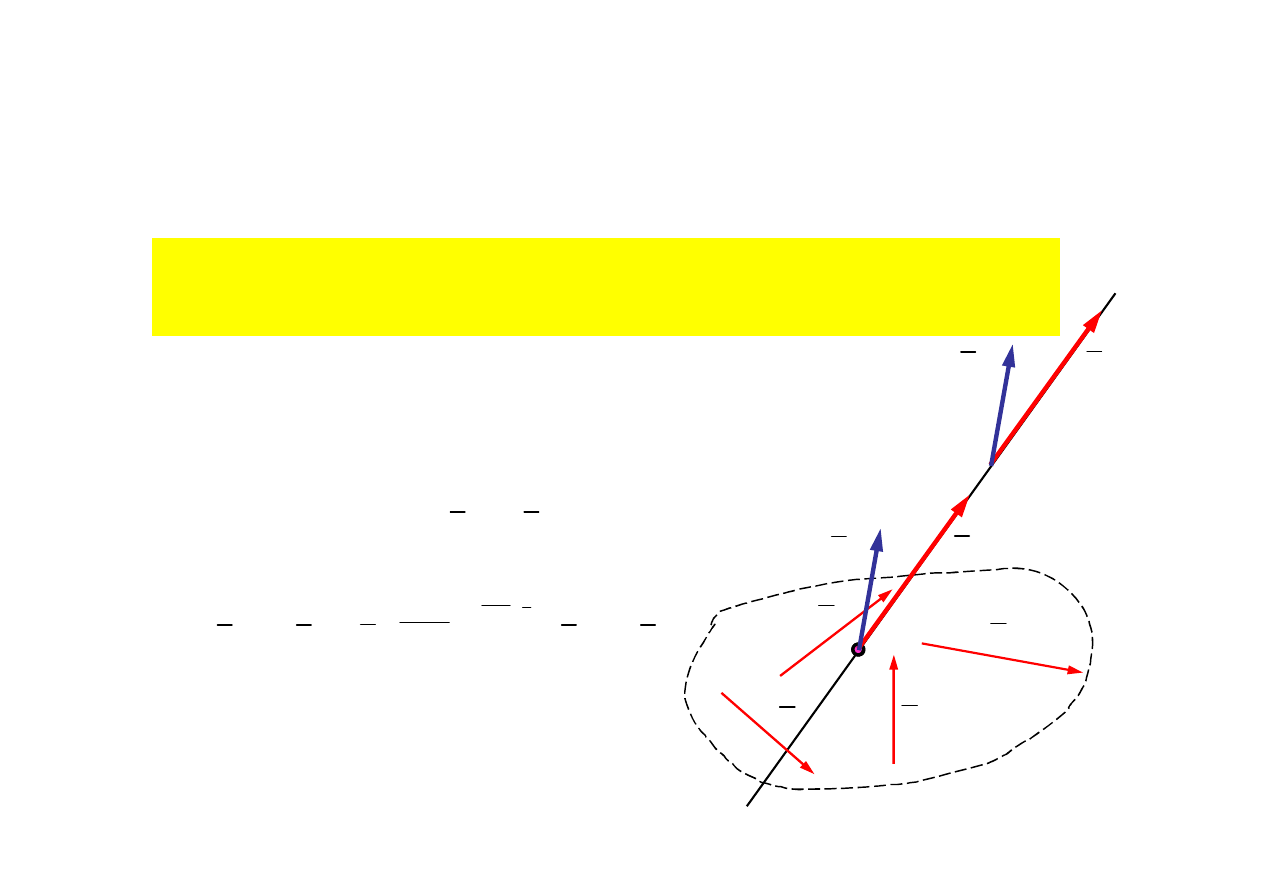
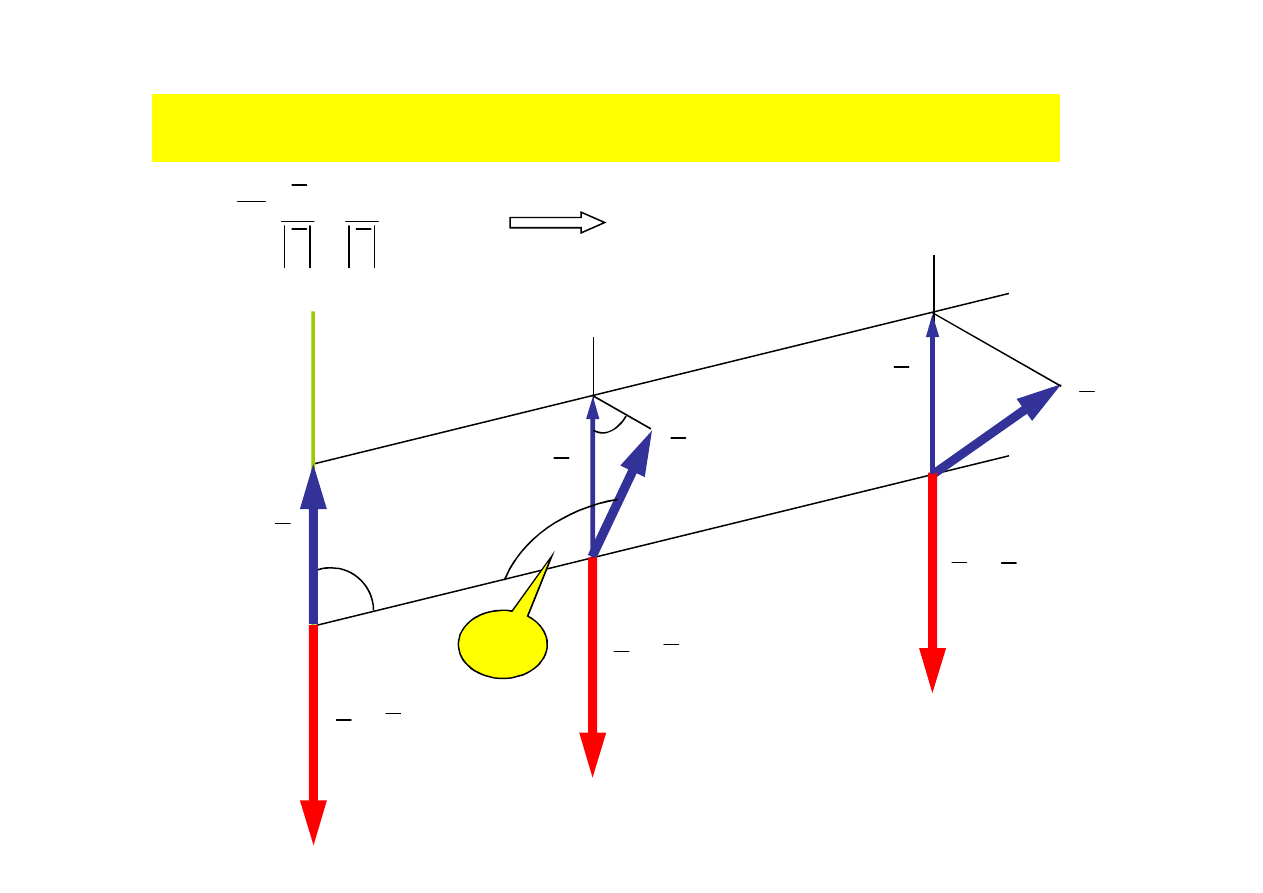
Wniosek 5
Rzut momentu na kierunek sumy jest stały i nie zależy od punktu redukcji
D:
S
K
M
const
S
S
Miara rzutu M na kierunek S
jest stała a tym samym rzut
M na S jest stały
A
B
A
M
a
S
B
M
b
S
O
M
O
O
ś
ś
ro
d
k
o
w
a
w
S
α
?
O
M
O
M
5
A
π
B
π
O
M
O
w
S
O
ś
ś
ro
d
k
o
w
a
a
S
b
S
A
M
B
M
A
B
O
M
O
M
n
O
A
M
M
S
AO
AO
O
A
M
AO
M
AO
S
AO
AO
0
0
A
M
AO
A
O
M
M
S
OA
S
OA
S
OA
S
OA
F
F
S
OB
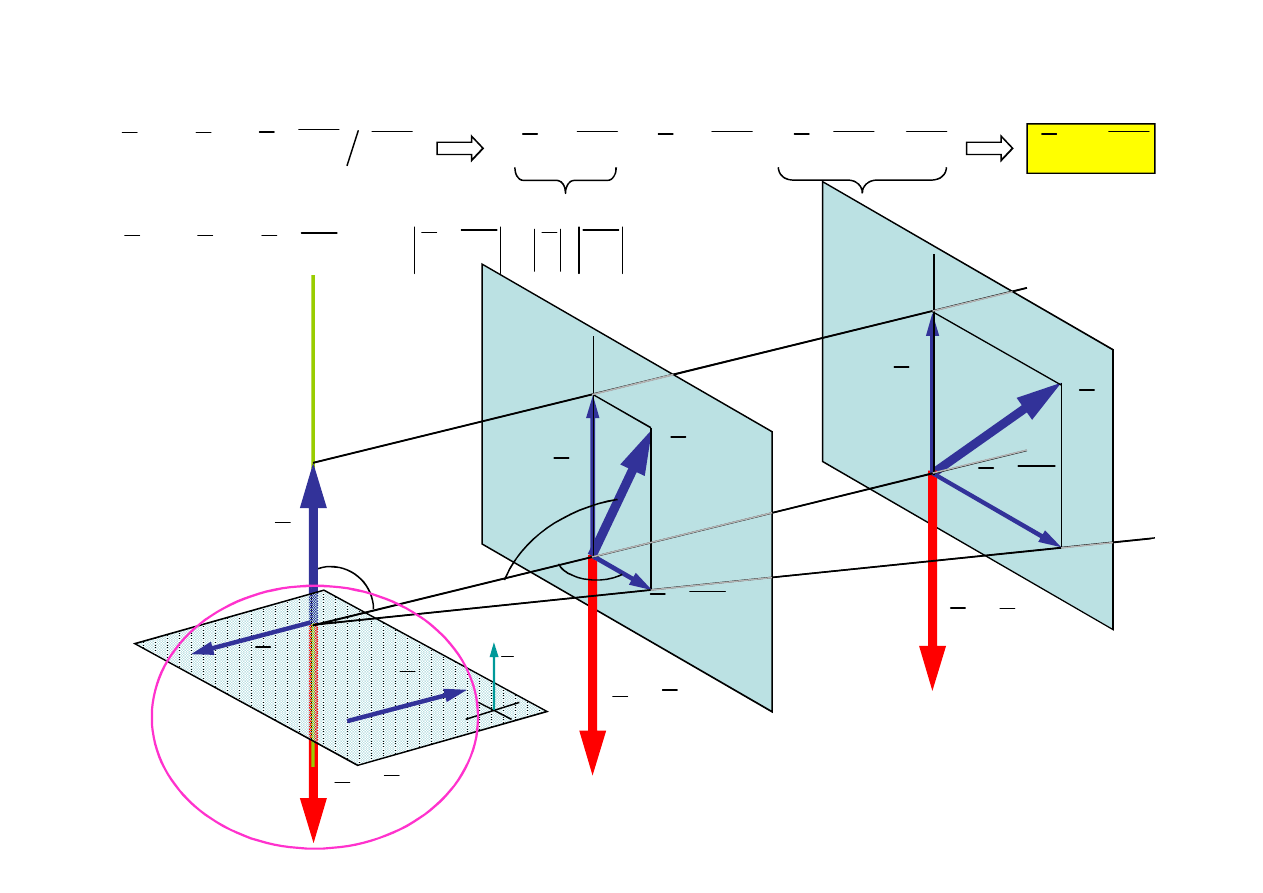
Skrętnik
1.2. Przypadek ogólny
K 0
- własności wektorów zredukowanych
6
A
π
B
π
O
w
S
O
ś
ś
ro
d
k
o
w
a
a
S
b
S
A
B
O
M
n
S
OA
A
M
O
M
B
M
O
M
F
F
S
OB
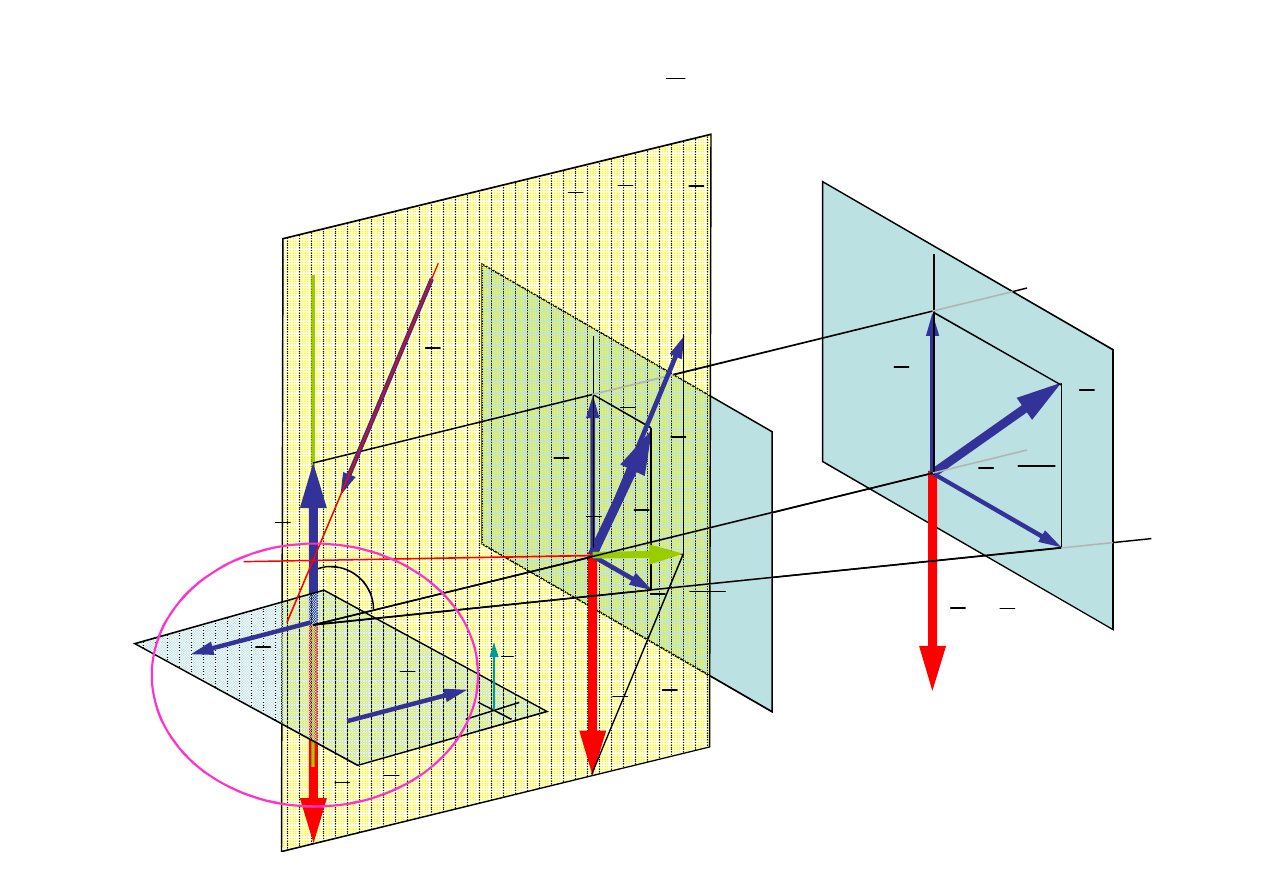
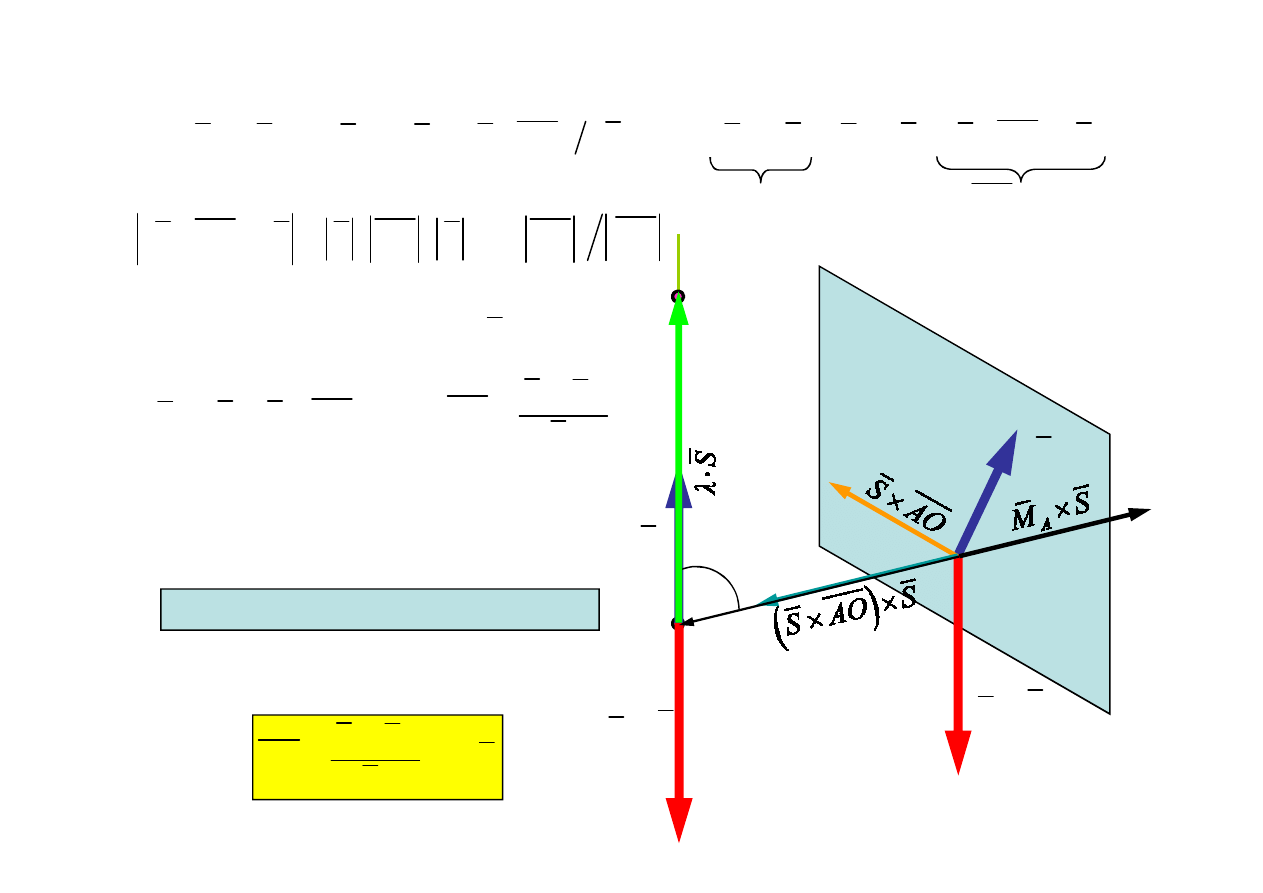
1.3. Przypadek szczególny K
S
0
0 - redukcja do wypadkowej
W punkcie O prostej działania wypadkowej układ sił
redukuje się do jednego wektora
w
S
M
0
F
F
a
F
Wypadkowa
7
O
O
ś
ś
ro
d
k
o
w
a
A
π
a
S
A
M
O
M
w
S
O
A
M
M
S
AO
S
O
A
M
S
M
S
S
AO
S
0
λ AO , λ
0
O
O : M
S
A
S
AO
S
S
AO S
λ AO
AO
λ
S
2
A
M
S
S
AO
2
A
S
M
AO
S
2
X x, y, z
A
S
M
OX
λ S
S
2
Wektorowe równanie osi środkowej
1.4. Równanie osi środkowej
8
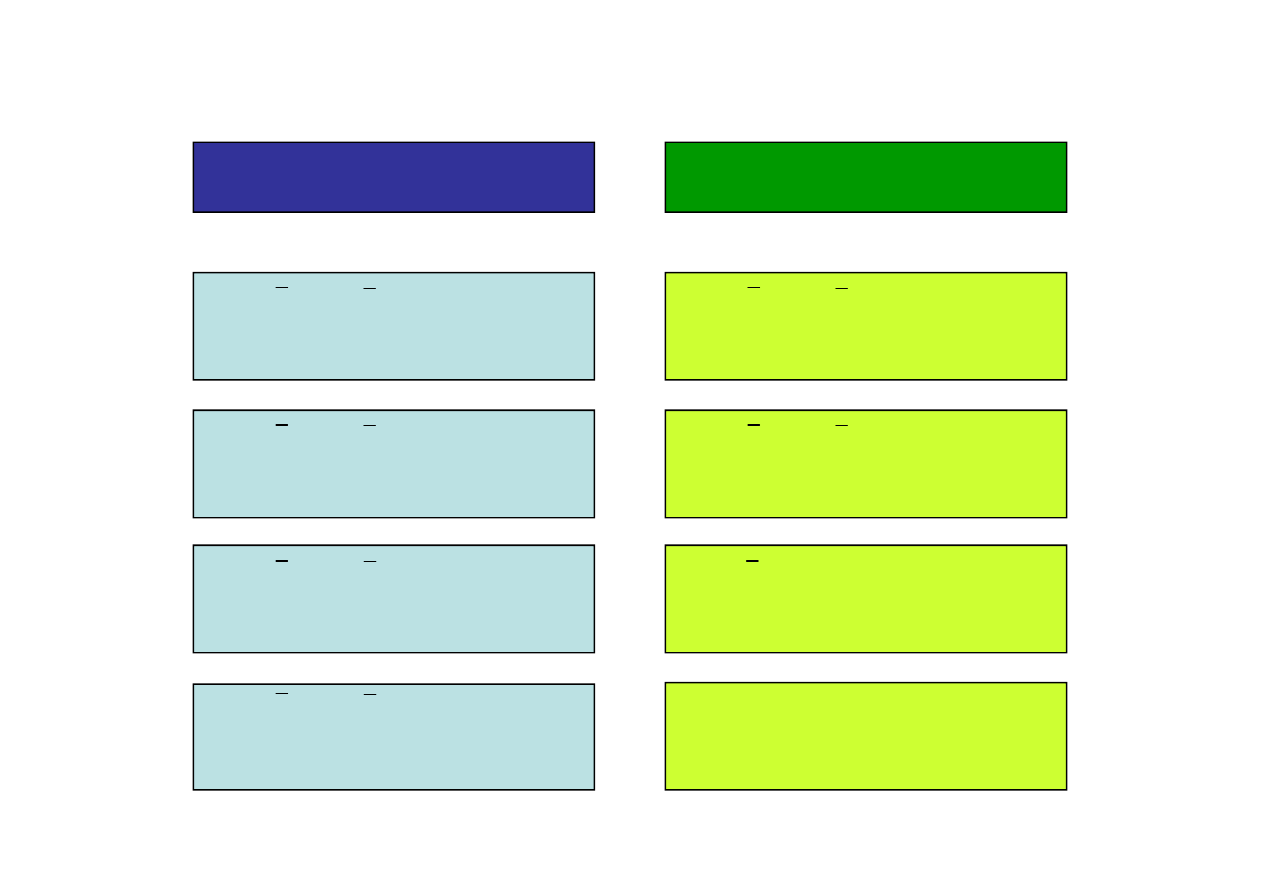
1.5. Przypadki redukcji - podsumowanie
Cztery przypadki redukcji
do najprostszej postaci
Cztery przypadki redukcji
w punkcie
Układ zerowy
1.
S
M
0
0
Para sił
2.
S
M
0
0
Skrętnik
4.
K 0
Wektor i para sił
(lub dwa wektory)
4.
S
M
0
0
Układ zerowy
1.
S
M
0
0
Para sił
2.
S
M
0
0
Jeden wektor
3.
S
M
0
0
Wypadkowa
3.
S
K
0
0

Część 2
PŁASKI UKŁAD SIŁ
10
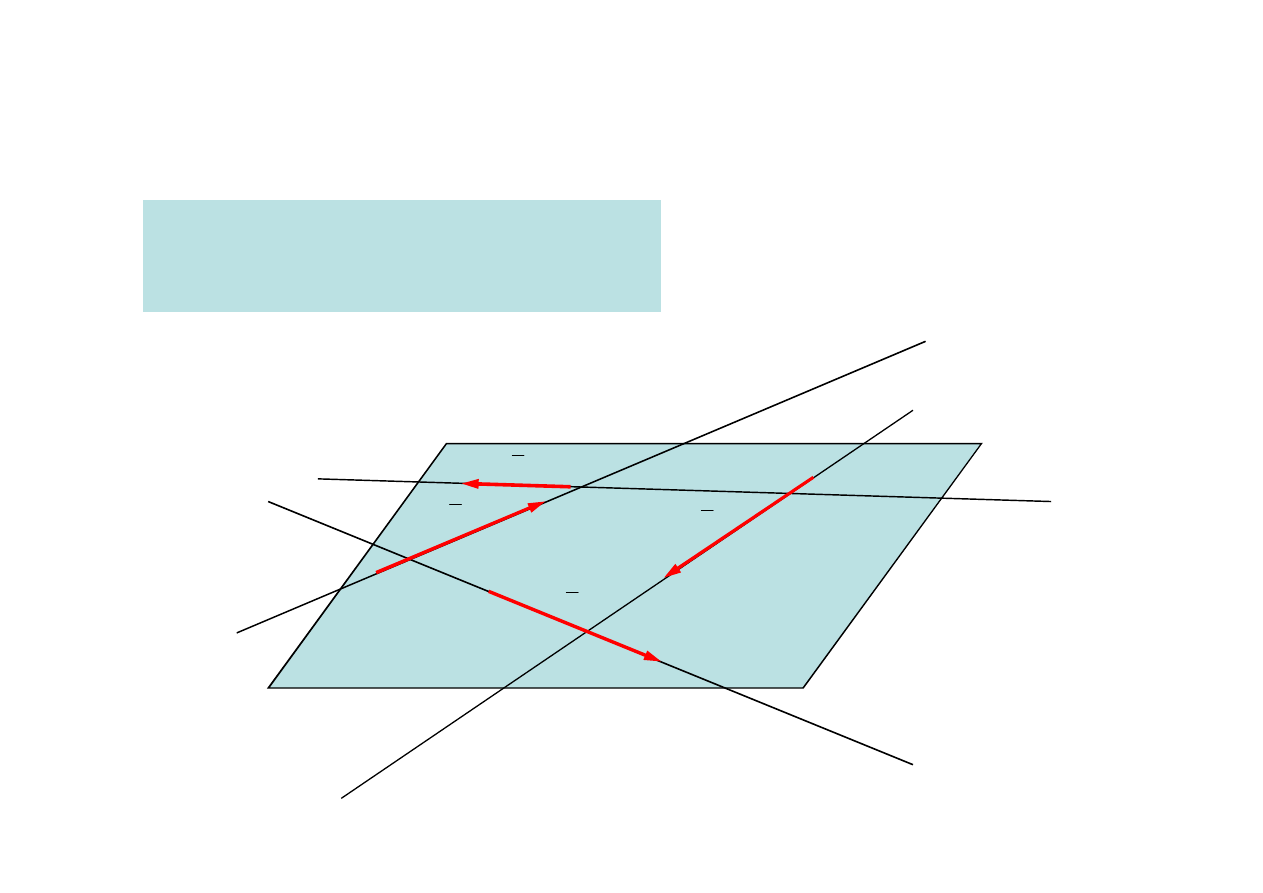
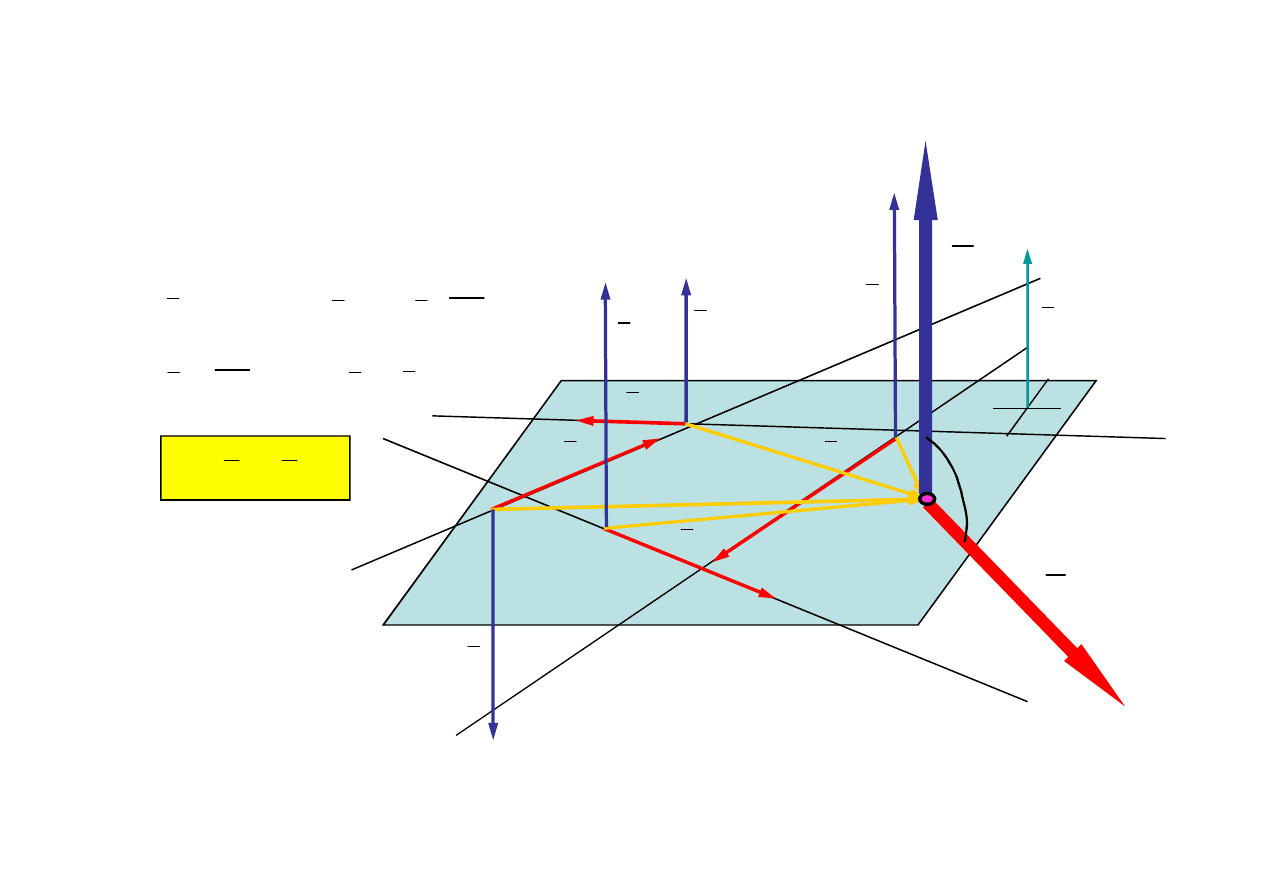
2.1. Definicja płaskiego układu sił
Płaski układ sił
Układ sił, których proste działania
zawierają się w jednej płaszczyźnie
F
1
π
i
F
F
3
F
2
11
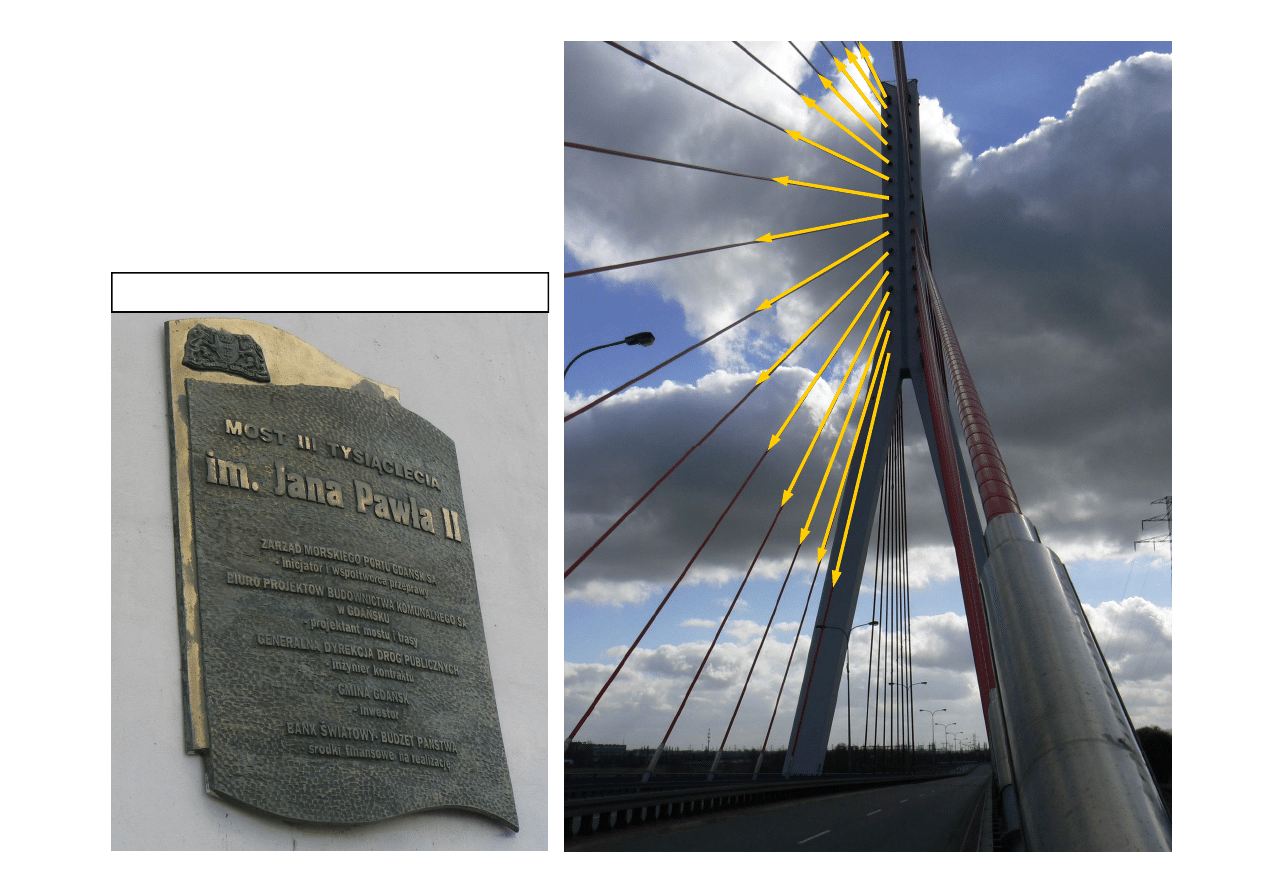
2.2. Przykłady
Układ sił przekazywanych na pylon
przez wanty mostu podwieszonego
fot. Henryk Laskowski – archiwum SKNMB
12
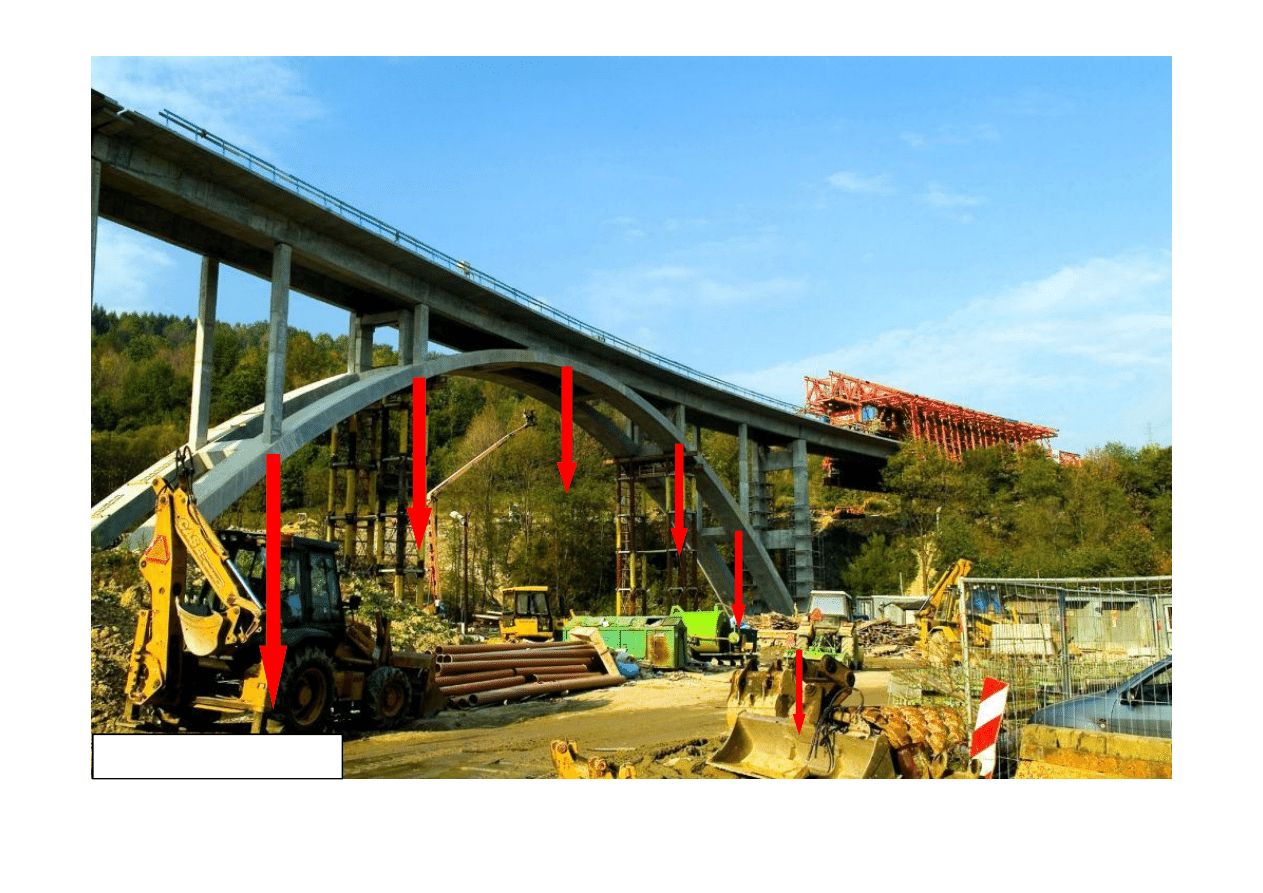
Układ sił przekazywanych na łuk
żelbetowy przez podpory pomostu
Wiadukt drogowy w Milówce
fot. Jacek Ostaficzuk
13
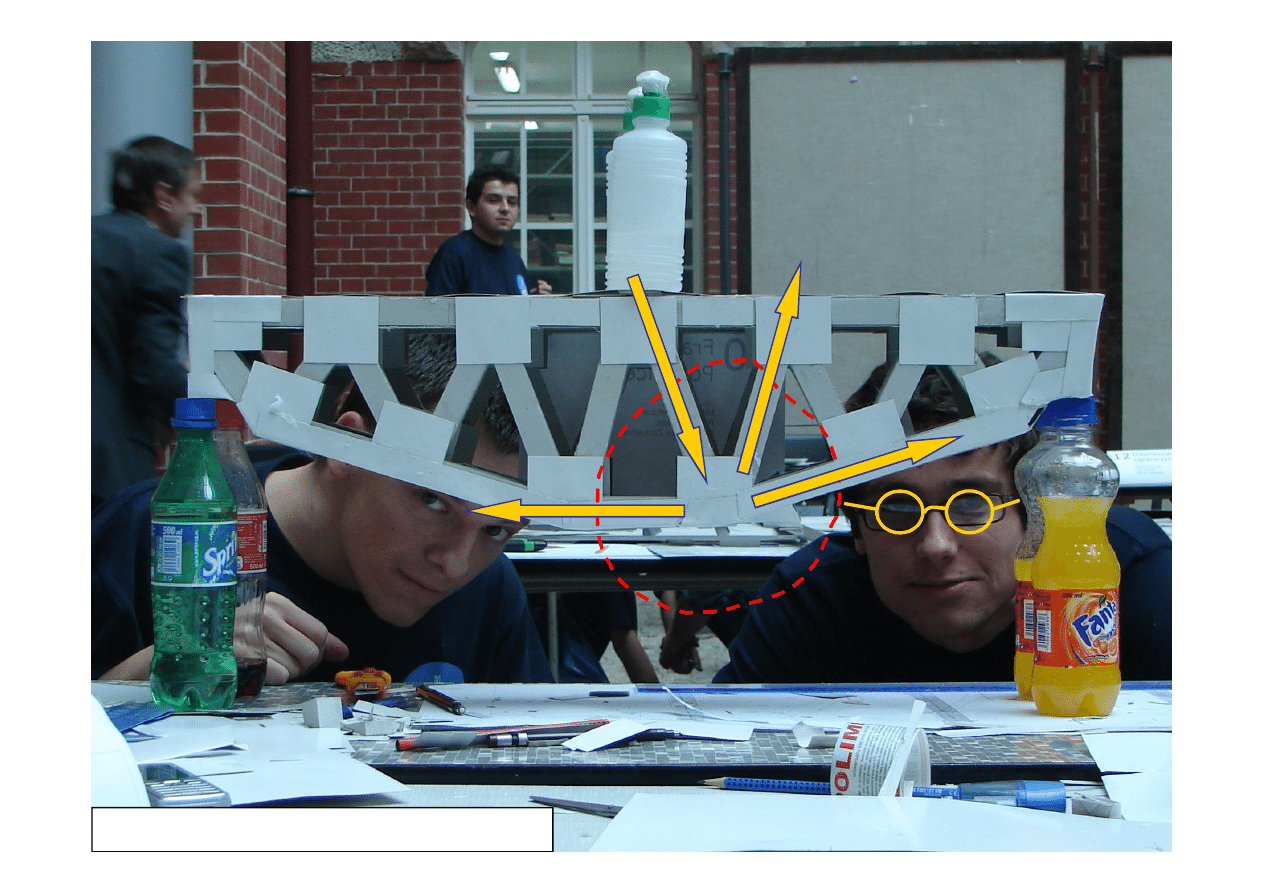
fot. Paweł Szafran – archiwum SKNMB
Układ sił w węźle kratownicy
14
2.3. Redukcja płaskiego układu sił
F
1
π
i
F
F
3
F
2
O
n
M
1
A
2
i
M
A
1
i
A
A
3
M
2
M
3
O
M
S
i
i
i
F
A O
π
M
S
n
i
i
S
F
1
n
O
i
i
i
M
F
A O
1
df
O
K
M
S
0
Redukcja w punkcie

15
n
A
2
F
1
A
i
A
2
A
i
F
1
F
n
F
Przypadek redukcji do najprostszej postaci
S
M
0
0
M
oś ś
rodk
owa
pros
ta dz
iałan
ia w
ypad
kowe
j
F
F
F
n
A
2
F
1
A
i
A
2
A
i
F
1
F
n
F
16
2.4. Przypadki redukcji płaskiego układu sił - podsumowanie
Trzy przypadki redukcji
do najprostszej postaci
Cztery przypadki redukcji
w punkcie
Układ zerowy
1.
S
M
0
0
Para sił
2.
S
M
0
0
Wypadkowa
3.
S 0
Wektor i para sił w płaszczyźnie
układu (lub dwa wektory)
4.
S
M
0
0
Układ zerowy
1.
S
M
0
0
Para sił
2.
S
M
0
0
Jeden wektor
3.
S
M
0
0
Płaski układ sił nie może się
zredukować ani do dwóch
wektorów skośnych ani do
skrętnika
17
P
5
Pa
16
O
y
x
a
a
A
1
A
2
A
3
z
M
P a
P
a
P
a
P a
P
a
Pa
Pa
5
6
3
3
3
4
4
7
16
4
P
6
P
5
A
4
Pa
16
x
S
P
P
P
6
4
2
y
S
P
P
P
P
5
3
4
2
P
3
P
4
P
4
b
S
P
P
2
2
0
O
M
Pa
0
0 4
Redukcja
do najprostszej postaci
O
M
S OX
0
Pa
P
P
x
y
z
0
0 0 4
2
2
0
y
x
a
2
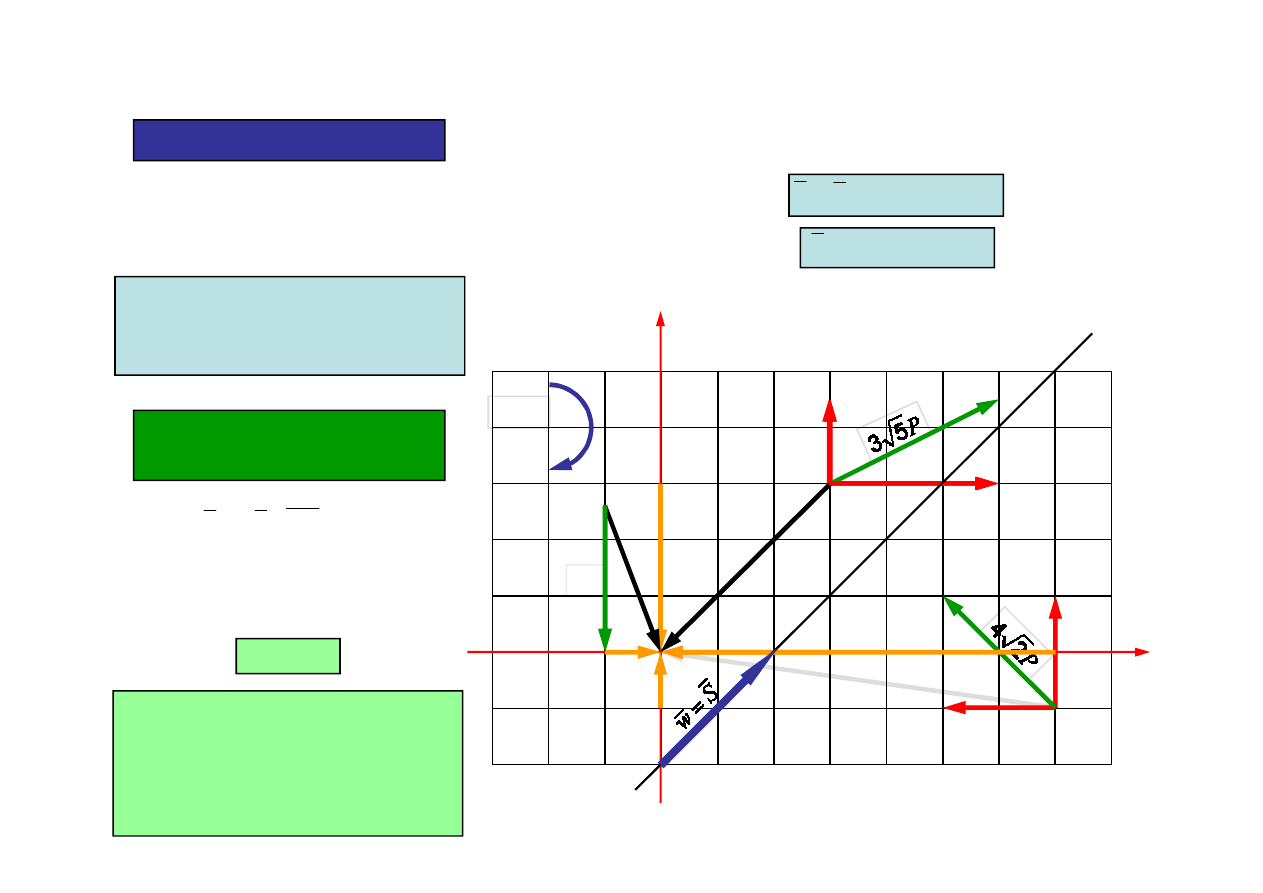
Redukcja w punkcie
Najprostszym równoważnym
układem zredukowanym jest
wypadkowa
w = S
o prostej
działania danej równaniem:
y = x – 2a
2.5. Redukcja płaskiego układu sił – przykład obliczeniowy
W punkcie
O
układ sił redukuje
się do wektora
b = S
oraz do
pary sił o momencie
M
O
Wyszukiwarka
Podobne podstrony:
MT st w 04 cz1 [tryb zgodności]
MT st w 04 cz2 [tryb zgodności]
MT st w 04 cz2 [tryb zgodno┼Ťci]
MT st w 08 09 [tryb zgodno┼Ťci]
04 CPM [tryb zgodnosci]id 4991 Nieznany (2)
6 niestacj uzupełnienie2014 04 24 [tryb zgodności]
WYKúAD 04 organizing [tryb zgodnoÂci]
MT st w 06 [tryb zgodności]
MT st w 08 [tryb zgodności]
MT st w 05 [tryb zgodności]
MT st w 07 [tryb zgodności]
MT st w 03 [tryb zgodno┼Ťci]
MT st w 02a [tryb zgodno┼Ťci]
MT st w 02 [tryb zgodno┼Ťci]
MT st w 10 [tryb zgodności]
więcej podobnych podstron