
Wykład 8,9
MECHANIKA TEORETYCZNA
Studia stacjonarne I stopnia – rok akademicki 2013/14
Autor:
Henryk Laskowski
Katedra Podstaw Mechaniki Ośrodków Ciągłych
Instytut Mechaniki Budowli
Wydział Inżynierii Lądowej
KINEMATYKA BRYŁY SZTYWNEJ

Część 1
Sposoby opisu ruchu ciała sztywnego
3
Ciało sztywne
– model fizyczny ciała o masie rozłożonej w pewnej przestrzeni,
której elementy nie mogą się względem siebie przemieszczać.
Punkt materialny jest szczególnym przypadkiem ciała sztywnego.
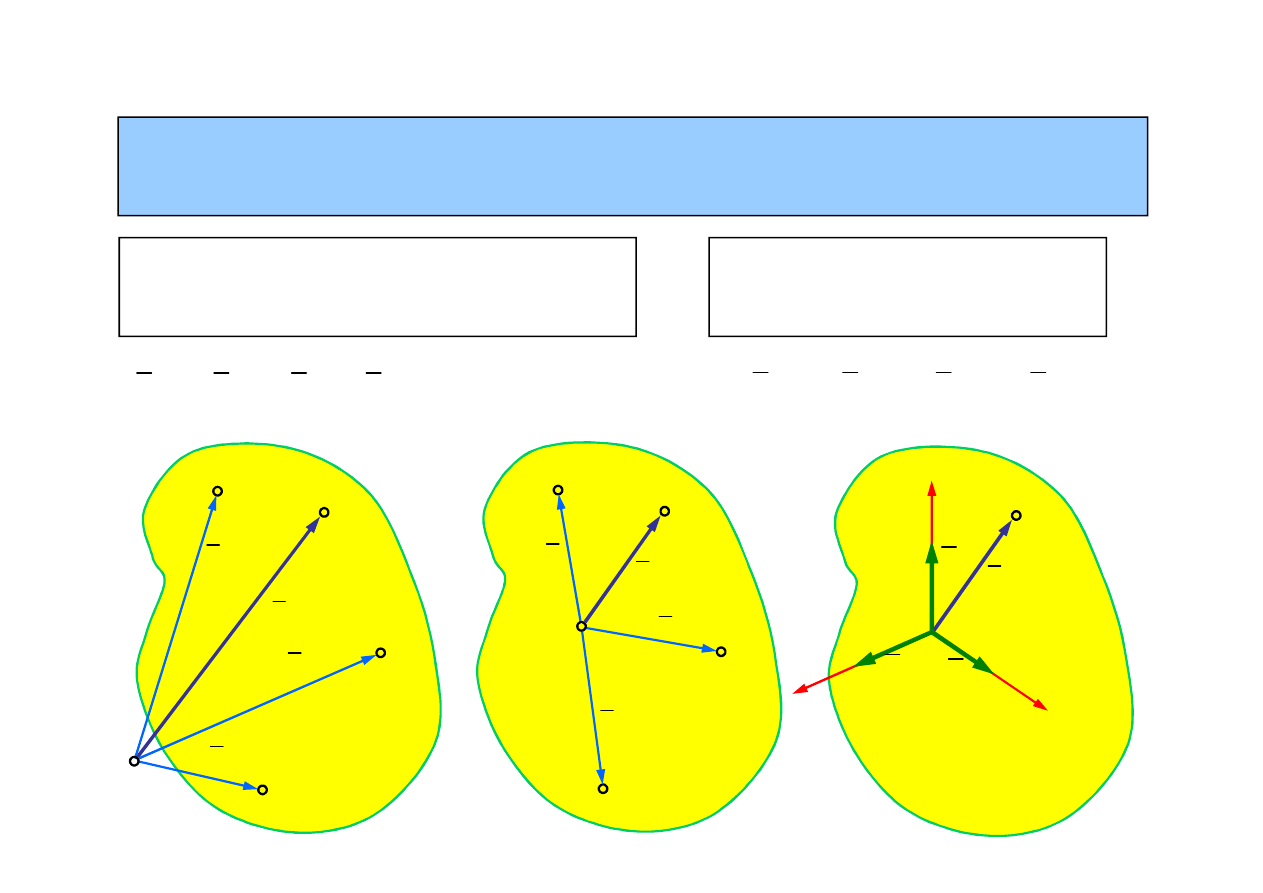
α, β, γ
Tymi wektorami mogą być
wersory układu współrzędnych
związanego z ciałem sztywnym
1
2
3
r
α r
β r
γ r
- liczby
rzeczywiste
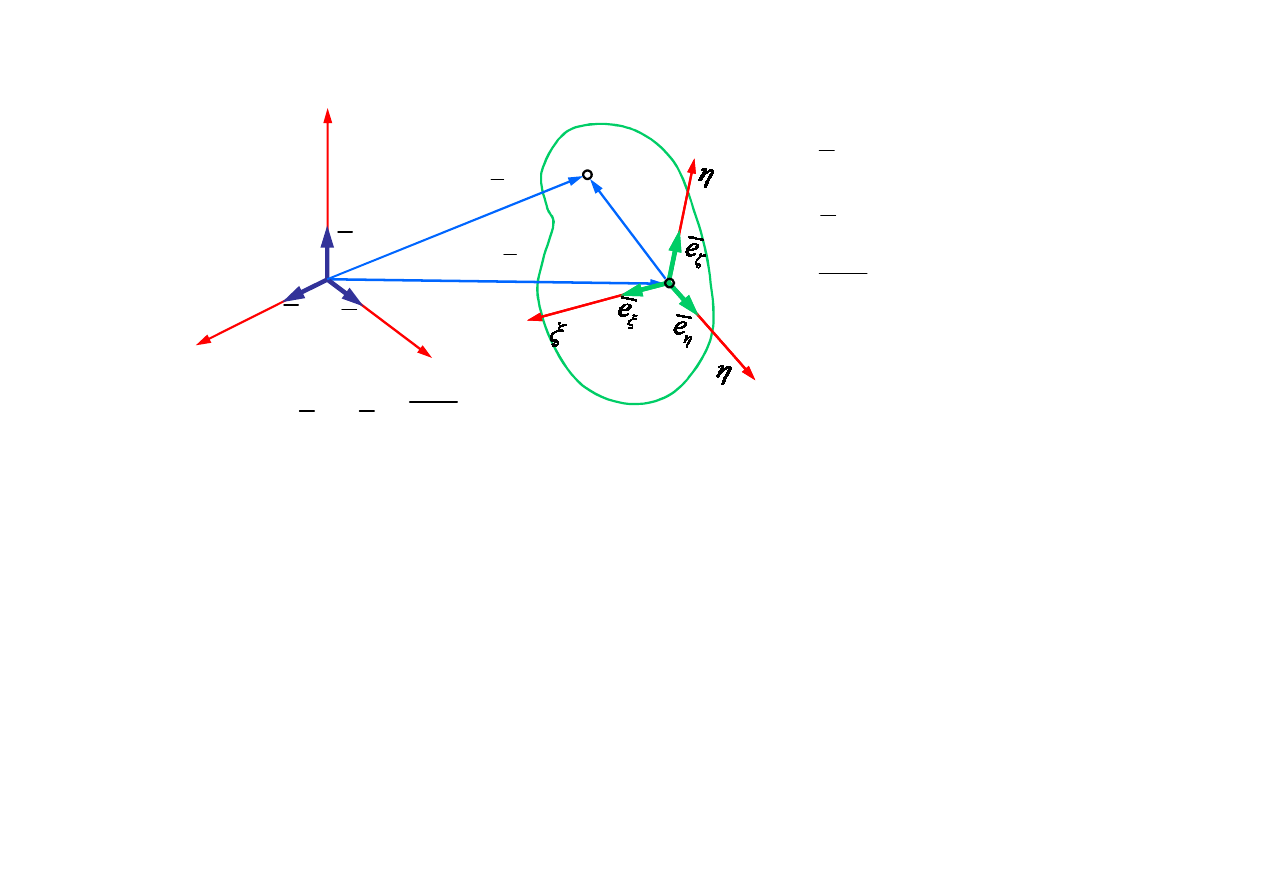
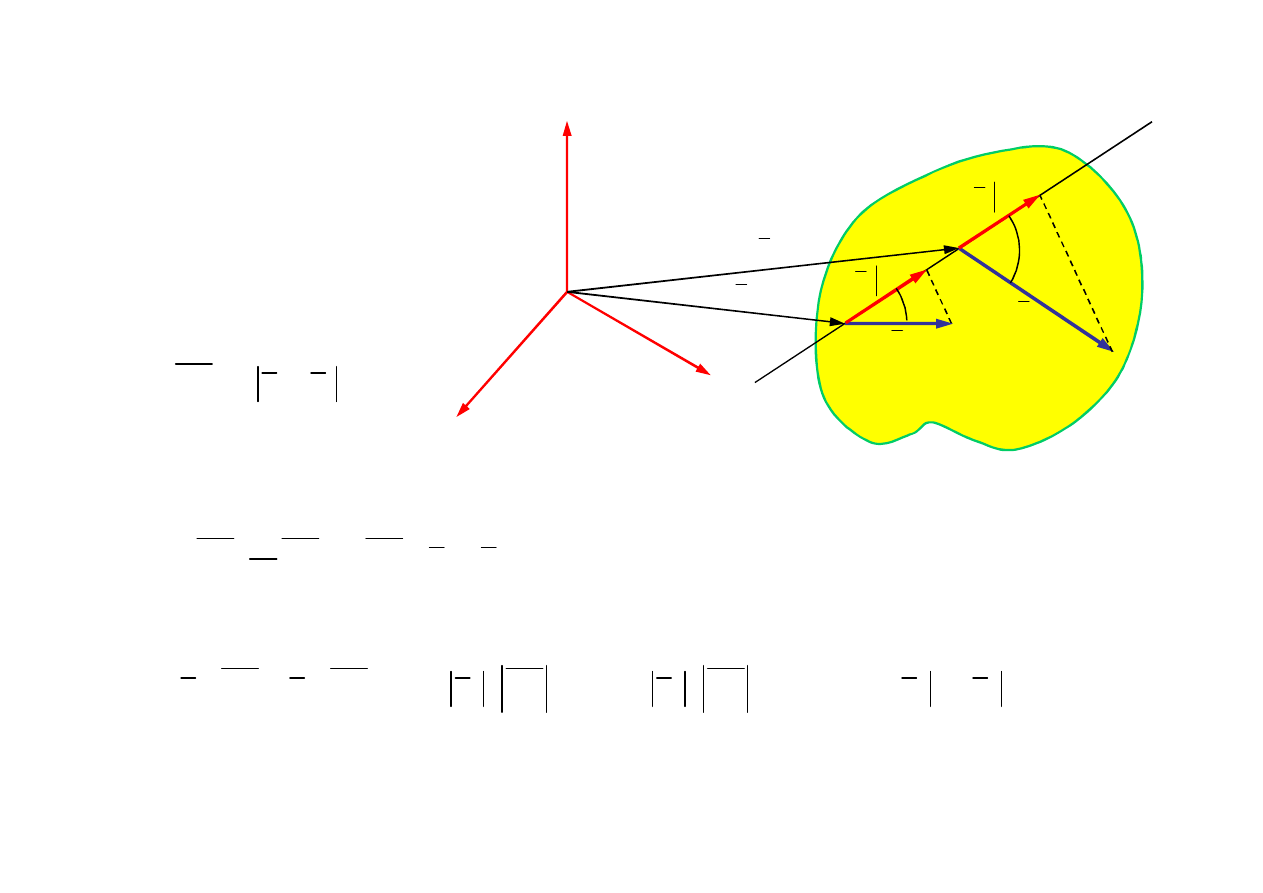
Dowolny wektor w przestrzeni można
przedstawić w postaci kombinacji liniowej
trzech niekomplanarnych wektorów.
ξ
ξ
η
η
ζ
ζ
ρ
ρ e
ρ e
ρ
e
1.1. Opis cech geometrycznych ciała sztywnego
O
1
A
2
A
3
A
A
1
r
2
r
3
r
r
1
A
2
A
3
A
A
1
ρ
2
ρ
3
ρ
ρ
O
ξ
ζ
η
A
ρ
ξ
e
ζ
e
η
e
O
4
1.2. Opis położenia ciała sztywnego
1
A
2
A
3
A
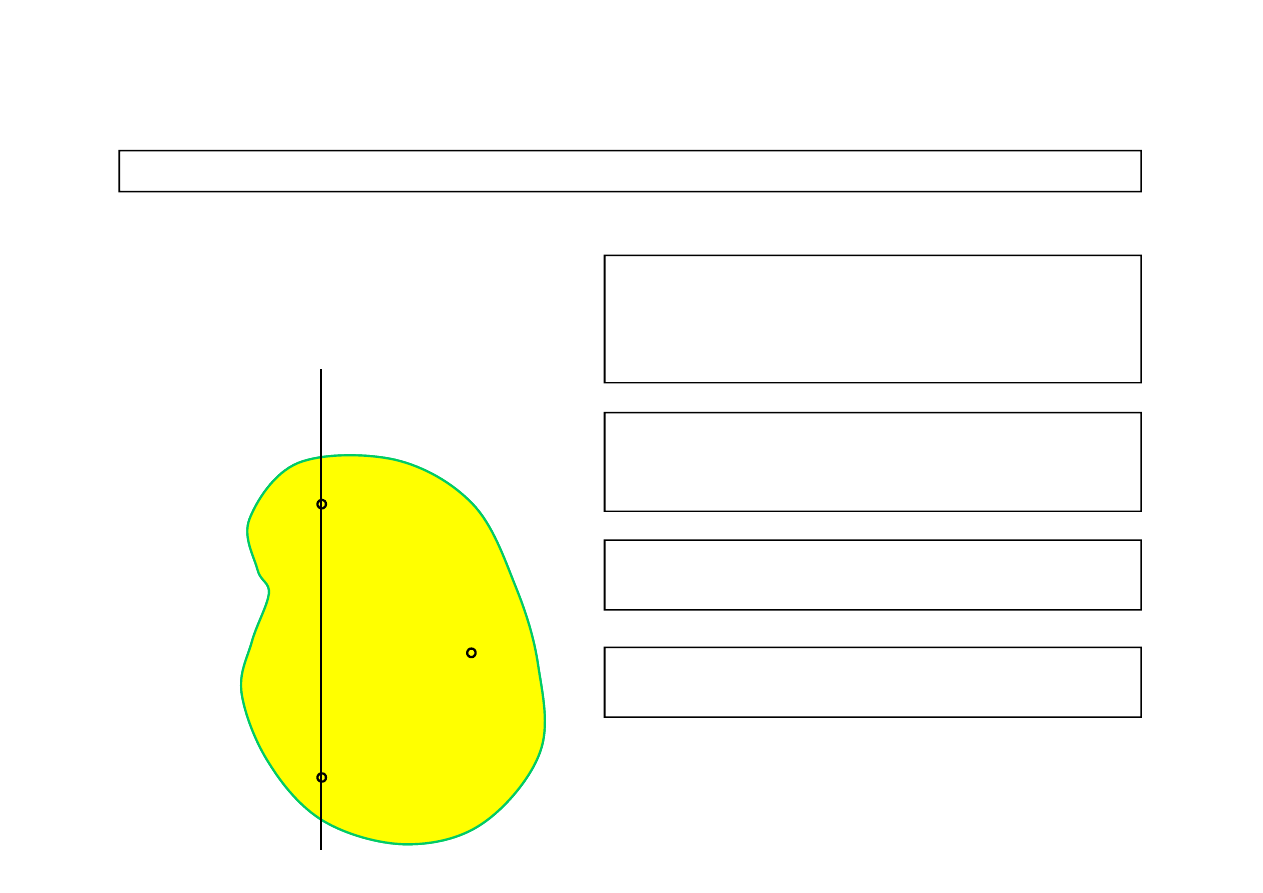
Aby unieruchomić bryłę sztywną, trzeba
unieruchomić trzy niewspółliniowe punkty
Pytanie: Ile punktów bryły należy unieruchomić, aby unieruchomić całą bryłę?
1 punkt – bryła obraca się w dowolnym
kierunku wokół dowolnej osi
przechodzącej przez ustalony
punkt
2 punkty – bryła obraca się w dowolnym
kierunku wokół osi przechodzą-
cej przez dwa ustalone punkty
3 punkty – bryła jest całkowicie
unieruchomiona
5
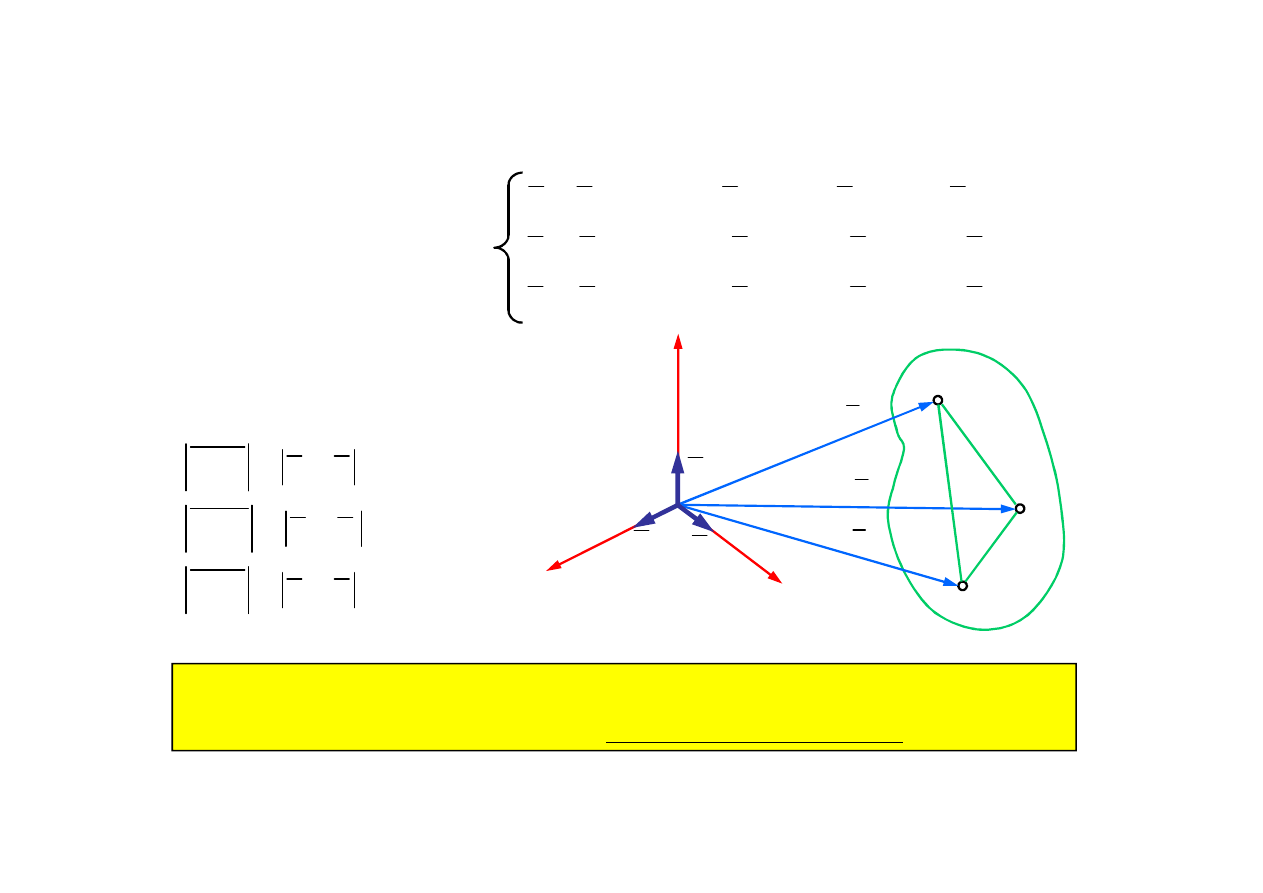
1.3. Opis ruchu ciała sztywnego przez podanie równań ruchu
trzech nie współliniowych punktów
Położenie bryły sztywnej w każdej chwili można określić za pomocą dziewięciu
skalarnych funkcji czasu które powinny spełniać trzy warunki sztywności. Sześć
niezależnych funkcji (9 – 3 = 6) nazywamy współrzędnymi uogólnionymi
2
2
2
2
2
x
y
z
r
r t
x t e
y
t e
z
t e
3
3
3
3
3
x
y
z
r
r t
x t e
y
t e
z
t e
1
1
1
1
1
x
y
z
r
r t
x t e
y t e
z t e
1
2
2
1
1
2
3
3
2
2
1
3
3
1
3
A A
r
r
d
const
A A
r
r
d
const
A A
r
r
d
const
Równania ruchu trzech
niewspółliniowych punktów
(9 skalarnych funkcji czasu):
Warunki stałych odległości
(3 równania algebraiczne):
1
A
2
A
3
A
1
r
2
r
3
r
x
z
O
y
x
e
y
e
z
e
1
d
2
d
3
d
6
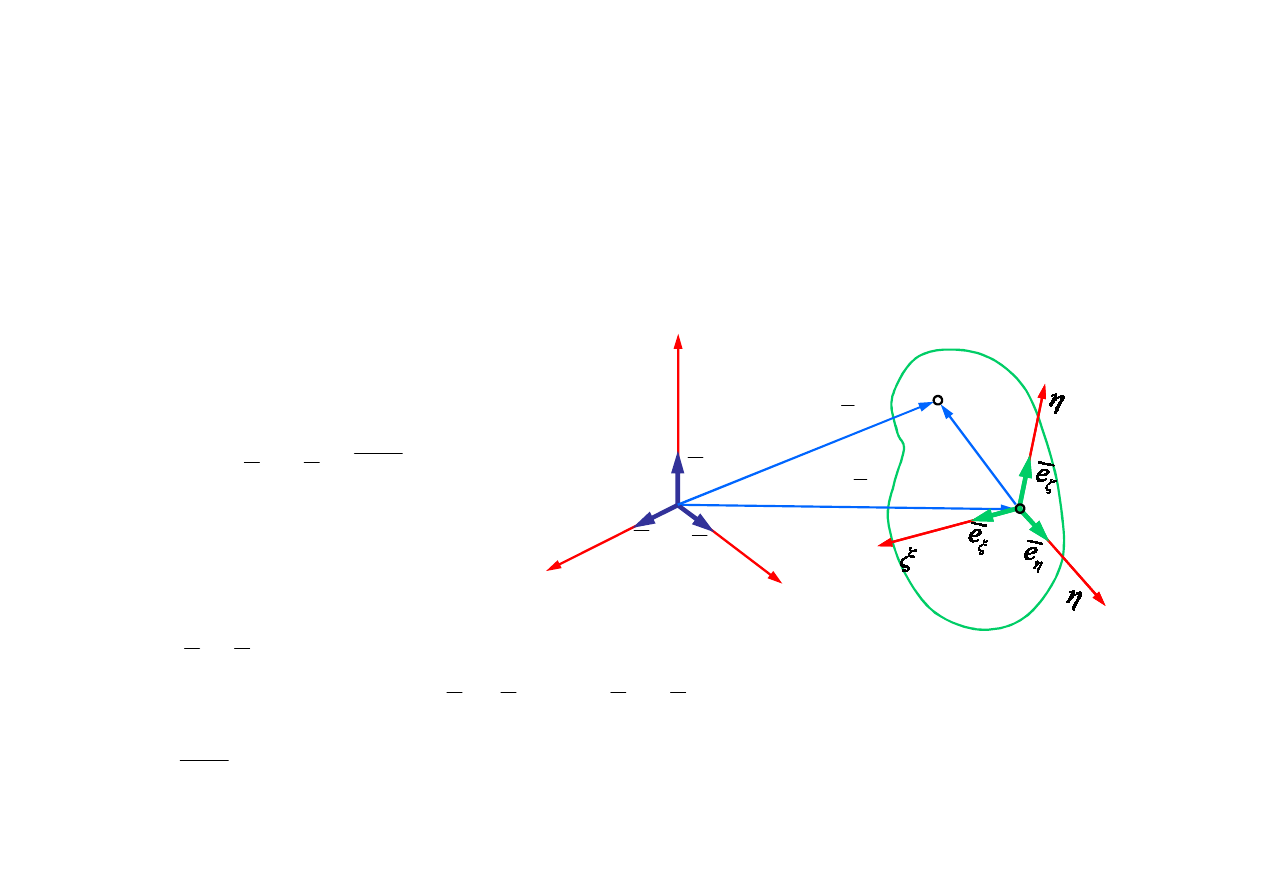
1.4. Opis ruchu ciała sztywnego we współrzędnych
przestrzennych i materialnych
M
A
r
r
AM
Układ Axhz – układ współrzędnych materialnych Lagrange’a
(niezależnych od czasu)
Związek wektorowy pomiędzy
opisem przestrzennym i materialnym
M
M
r
A
r
x
z
O
y
x
e
y
e
z
e
A
Układ Oxyz – układ współrzędnych przestrzennych Eulera
- wektor zdefiniowany we współrzędnych materialnych
niezależnych od czasu
AM
M
A
r , r
A
A
M
M
r
r t ,
r
r
t
- wektory zdefiniowane we współrzędnych przestrzennych
7
M
A
r
r
AM
w zapisie macierzowym:
Związek
A
A
A
ξ
cos x,ξ
c os y,ξ
cos z,ξ
x
x
η
cos x,η
cos y,η
cos z,η
y
y
ζ
cos x,ζ
cos y,ζ
cos z,ζ
z
z
A
A
A
x
x
cos x,ξ
cos x,η
cos x,ζ
ξ
y
y
cos y,ξ
cos y,η
cos y,ζ
η
z
z
cos z,ξ
cos z,η
cos z,ζ
ζ
A
A
A
ξ
x
x
η
α
y
y
ζ
z
z
A
T
A
A
x
x
ξ
y
y
α
η
z
z
ζ
A
A
A
A
r
x
y
z
M
r
x
y
z
AM
ξ
η
ζ
M
M
r
A
r
x
z
O
y
x
e
y
e
z
e
A
8
Własności macierzy przejścia:
Iloczyn skalarny dwóch wierszy (kolumn) jednoimiennych jest równy 1
Elementy macierzy przejścia
kosinusy kierunkowe osi układu współrzędnych przestrzennych w układzie współrzędnych
materialnych i materialnych w układzie współrzędnych przestrzennych
Kolumny macierzy przejścia
współrzędne wersorów układu
przestrzennego we współrzędnych
materialnych
Macierz przejścia zawiera 9 elementów, jednak tylko trzy są niezależne, ponieważ te
9 elementów powinno spełniać 6 niezależnych warunków
cos x,ξ
c os y,ξ
cos z,ξ
α
cos x,η
cos y,η
cos z,η
cos x,ζ
cos y,ζ
cos z,ζ
Wiersze macierzy przejścia
współrzędne wersorów układu
materialnego we współrzędnych
przestrzennych
x
e
y
e
z
e
ξ
e
η
e
ξ
e
Macierz przejścia opisuje rotację ciała
Iloczyn skalarny dwóch wierszy (kolumn) różnoimiennych jest równy 0
9
2
2
2
1
ξ
ξ
e e
cos
x,ξ
c os
y,ξ
cos
z,ξ
2
2
2
1
η
η
e e
cos
x,η
c os
y,η
cos
z,η
2
2
2
1
ζ
ζ
e e
cos
x,ζ
c os
y,ζ
cos
z,ζ
0
ξ
η
e e
cos x,ξ
cos x,η
c os y,ξ
c os y,η
cos z,ξ
cos z,η
0
η
ζ
e e
cos x,η cos x,ζ
c os y,η c os y,ζ
cos z,η cos z,ζ
0
ξ
ζ
e e
cos x,ξ
cos x,ζ
c os y,ξ
c os y,ζ
cos z,ξ
cos z,ζ
2
2
2
1
x
x
e e
cos
x,ξ
c os
x,η
cos
x,η
2
2
2
1
y
y
e e
cos
y,ξ
c os
y,η
cos
y,ζ
2
2
2
1
z
z
e e
cos
z,ξ
c os
z,η
cos
z,ζ
0
x
y
e e
cos x,ξ
cos y,ξ
c os x,η c os y,η
cos x,ζ
cos y,ζ
0
y
z
e e
cos y,ξ
cos z,ξ
c os y,η c os z,η
cos y,ζ
cos z,ζ
0
x
z
e e
cos x,ξ
cos z,ξ
c os x,η c os z,η
cos x,ζ
cos z,ζ
Związki pomiędzy elementami macierzy przejścia:
10
Znajomość kątów kierunkowych pozwala na jednoznaczne wyznaczenie macierzy
przejścia a odwrotne działanie nie daje jednoznacznego wyniku
Zdefiniowanie wektora jest równoznaczne ze zdefiniowaniem trzech niezależnych
skalarnych funkcji czasu
A
A
A
A
r t
x
t
y
t
z
t
A
r t
A
A
r
r t
Jednoznaczny opis ruchu ciała sztywnego we współrzędnych przestrzennych i materialnych
sprowadza się do opisu ruchu ustalonego punktu bryły sztywnej, z którym jest związany układ
współrzędnych Lagrange’a
cos x,ξ
c os y,ξ
cos z,ξ
α
cos x,η
cos y,η
cos z,η
cos x,ζ
cos y,ζ
cos z,ζ
oraz zdefiniowania dziewięciu kątów kierunkowych jako funkcji czasu występujących w
elementach macierzy przejścia z układu Lagrange’a do układu Eulera.
Spośród dziewięciu kątów kierunkowych tylko trzy są niezależne ponieważ wszystkie,
poprzez elementy macierzy przejścia, są związane sześcioma niezależnymi warunkami.
Jednak te warunki nie pozwalają na jednoznaczne wyznaczenie sześciu niewiadomych
kątów w przypadku, gdy tylko trzy są ściśle określone.
11
x'
z'
y'
x'
z'
y'
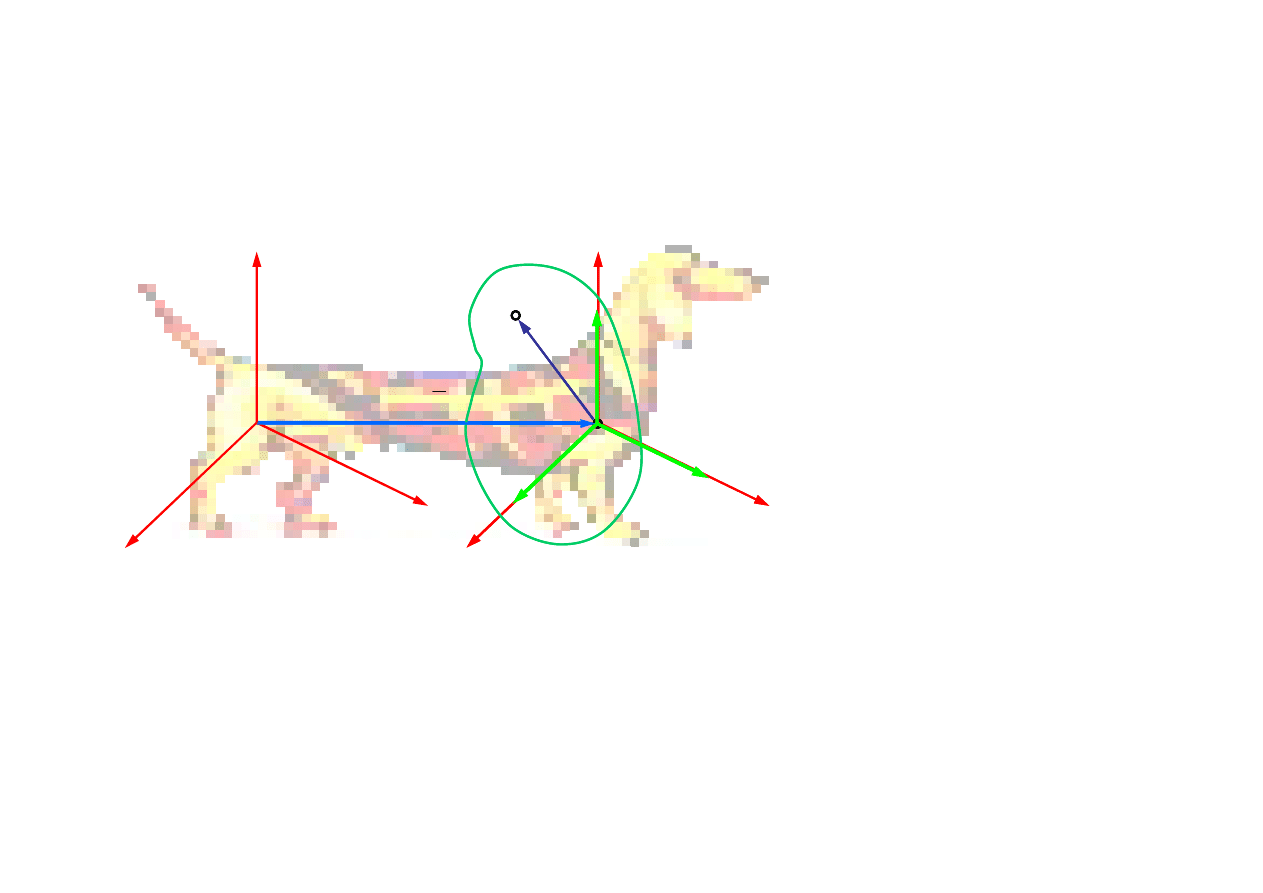
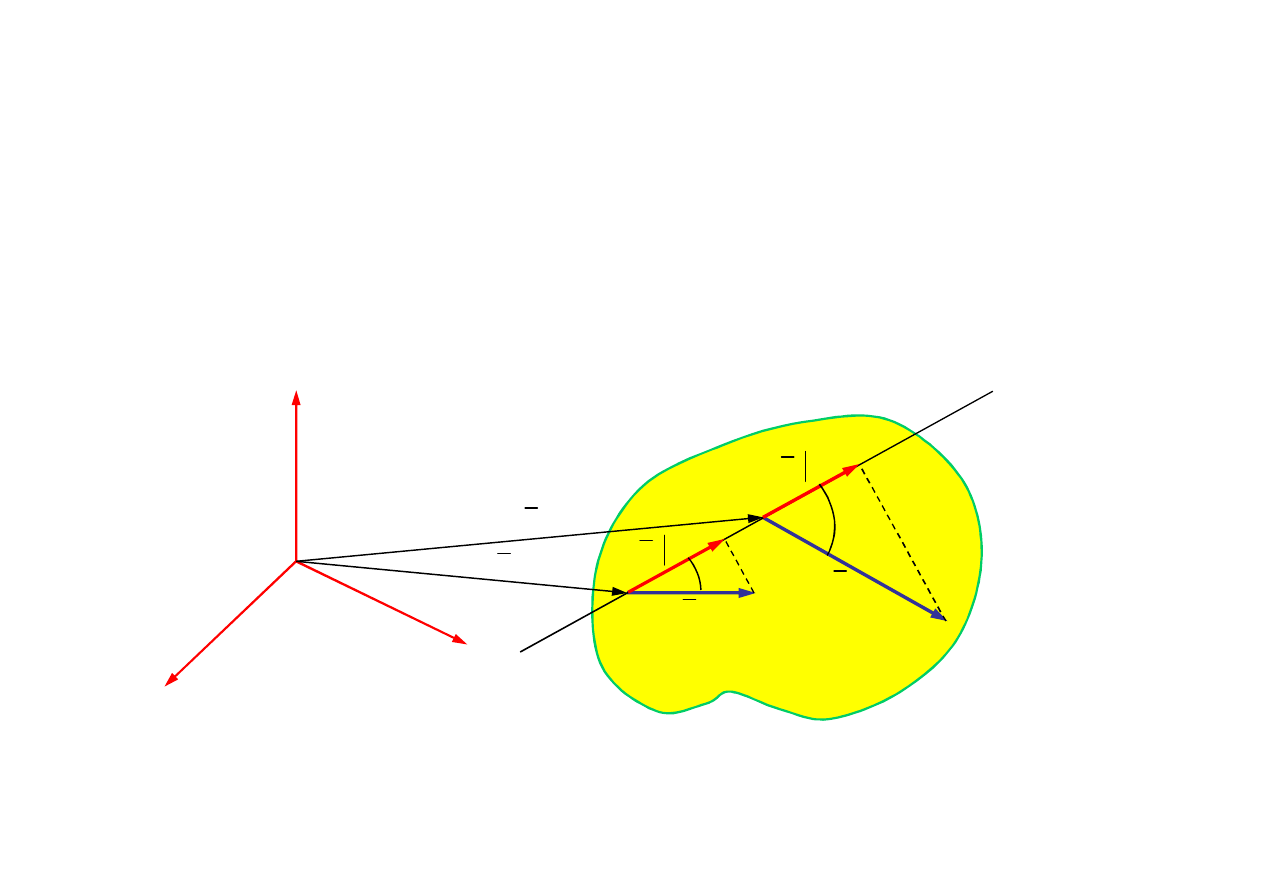
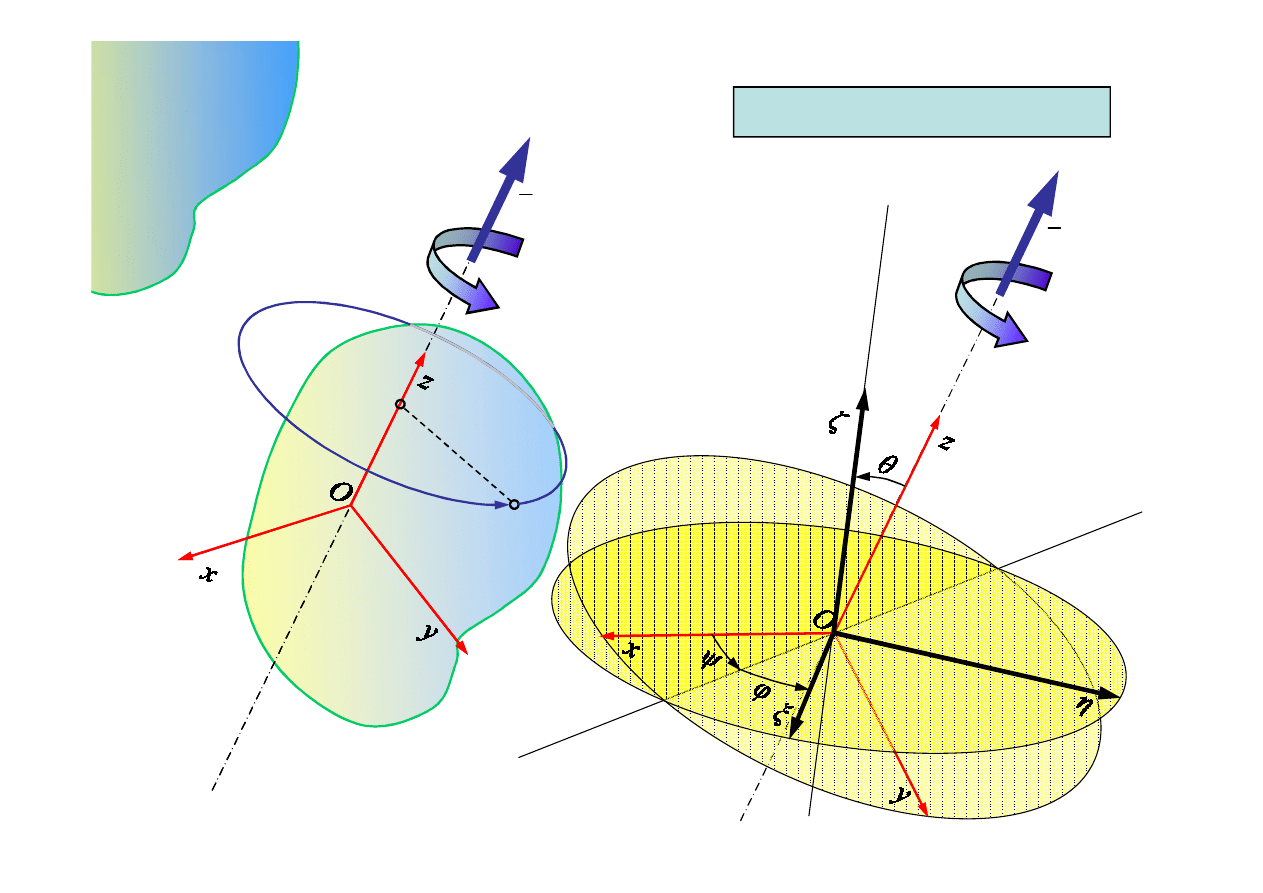
1.5. Opis ruchu ciała sztywnego za pomocą kątów Eulera
Każdy ruch bryły sztywnej można przedstawić jako złożenie ruchu postępowego
pewnego ustalonego punktu oraz ruchu obrotowego bryły wokół tego punktu
A
r
x
z
O
y
M
A
ξ
ζ
η
M
A
ξ
ζ
η
Opis ruchu
- opis ruchu postępowego punktu A w układzie przestrzennym Oxyz za pomocą
wektora r
A
- opis położenia punktu M w układzie materialnym Axhz za pomocą wektora AM
- opis ruchu obrotowego układu materialnego Axhz w układzie Ax’y’z’, przesuniętym
równolegle względem układu Oxyz , za pomocą kątów Eulera
12
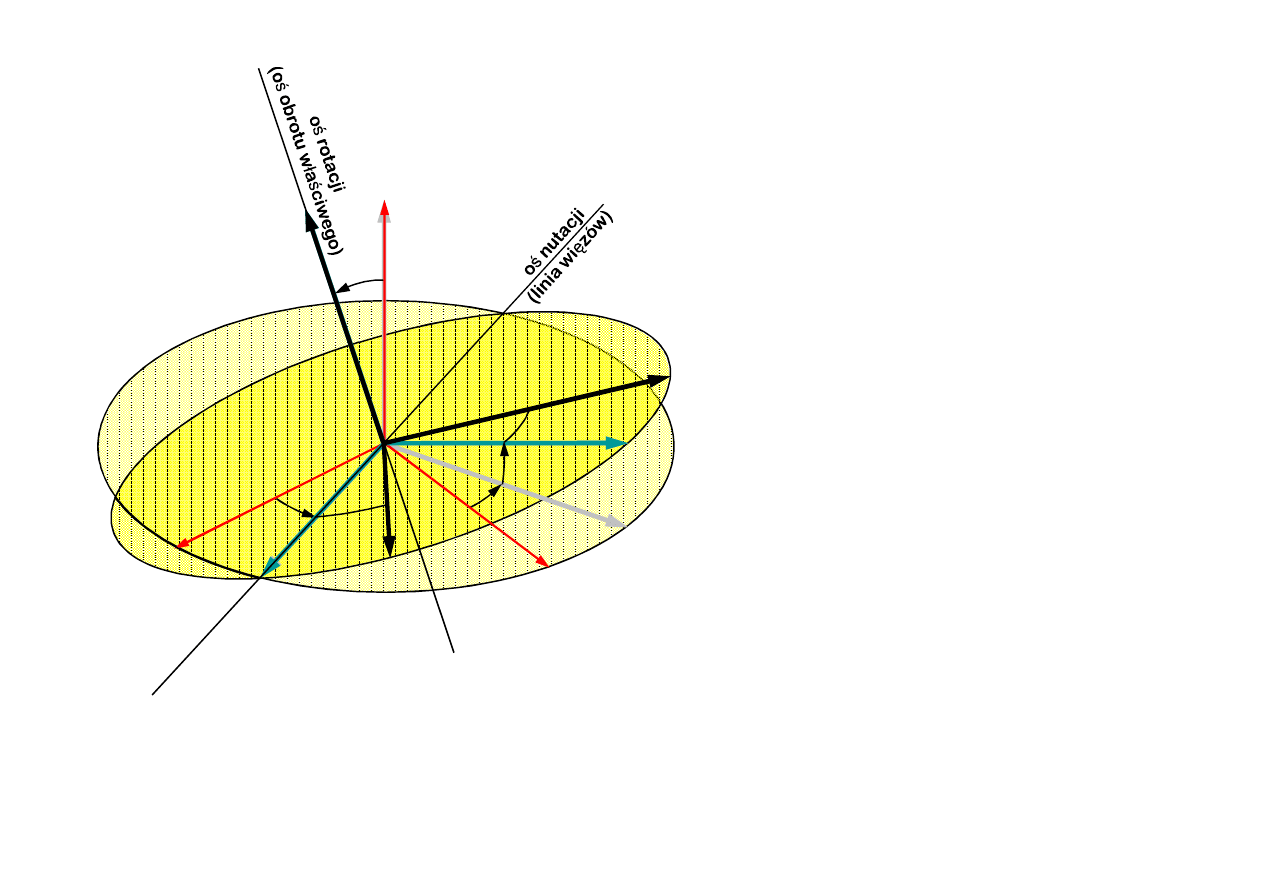
O
x
y
z
θ
ζ
ξ
φ
η
Kąt rotacji φ (kąt obrotu właściwego)
zawarty pomiędzy osią nutacji a osią Ox
Definicja kątów Eulera
Kąt nutacji y
zawarty pomiędzy osią Ox a osią nutacji
leżącą w płaszczyźnie Oxy
Kąt precesji q
zawarty pomiędzy osią Oz a osią Oz
ψ
13
1
ζ
1
ξ
1
η
2
π
ψ
ψ
ψ
O
x
y
z
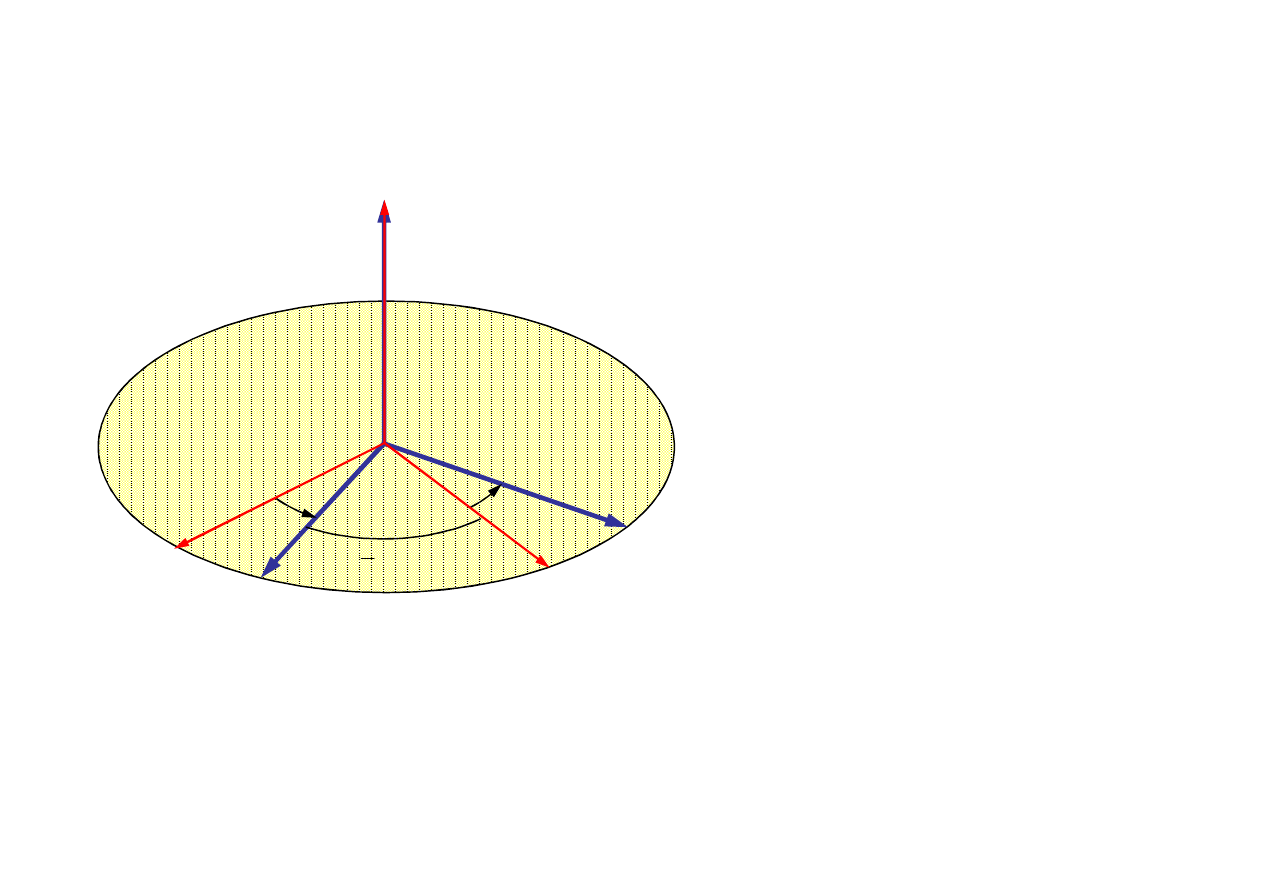
Obrót wokół osi Oz o kąt y (precesja, kąt precesji)
1
1
1
0
0
0
0
1
ξ
cos ψ
sinψ
x
η
sinψ
cos ψ
y
ζ
z
1
1
1
1
1
0
0
0
0
1
cos x,ξ
c os y,ξ
α
cos x,η
cos y,η
1
0
0
0
0
1
cos ψ
sin ψ
α
sin ψ
cos ψ
1
1
1
ξ
x cos ψ
y sin ψ
η
x sin ψ
y cos ψ
ζ
z
14
1
ζ
1
ξ
1
η
2
π
ψ
ψ
ψ
O
x
y
z
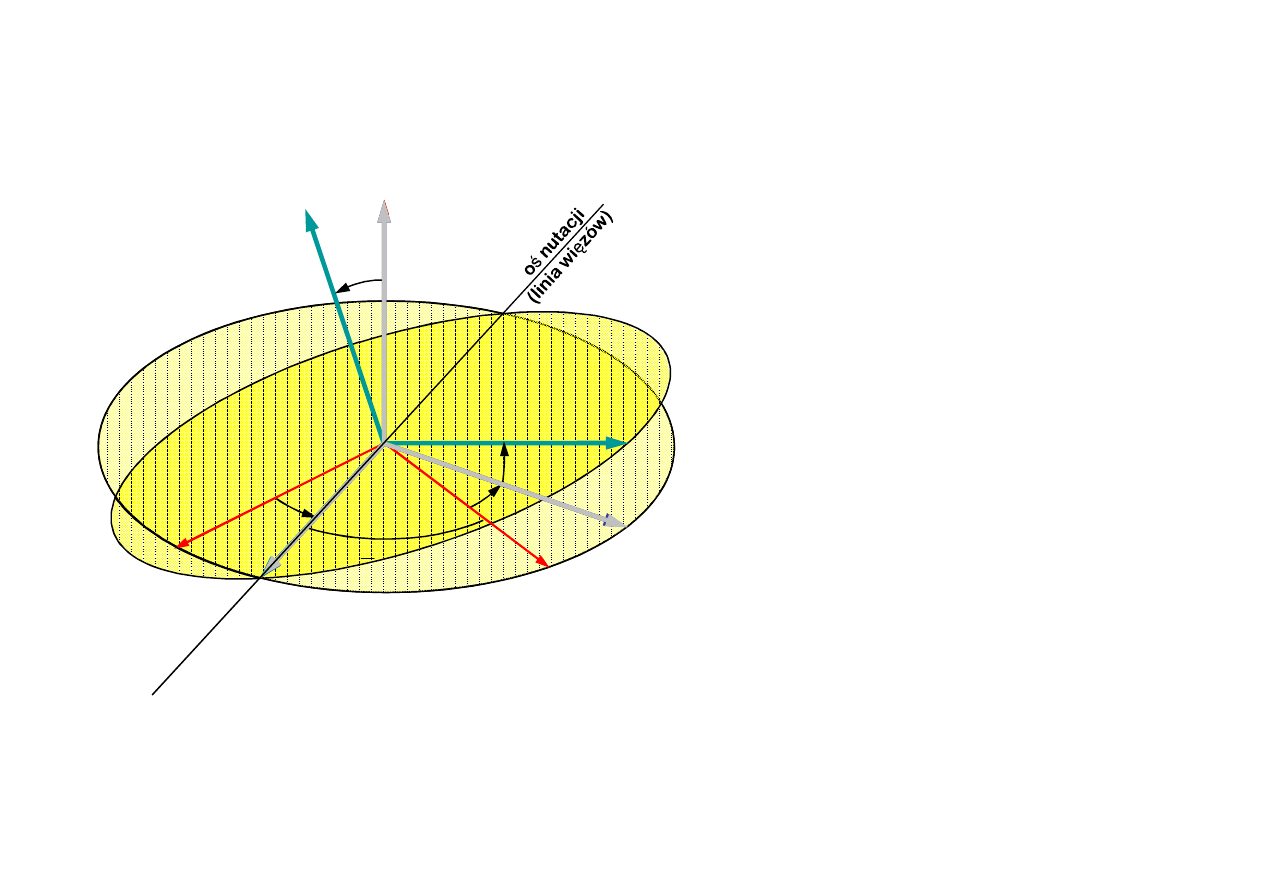
Obrót wokół osi Ox
1
o kąt q (nutacja, kąt nutacji)
2
1
2
1
2
1
1
0
0
0
0
ξ
ξ
η
cos θ
sin θ
η
ζ
sin θ
cos θ
ζ
2
1
2
1
2
1
2
1
2
1
0
0
0
0
α
cos η ,η
c os ζ ,η
cos η ,ζ
cos ζ ,ζ
2
1
0
0
0
0
α
cos θ
sin θ
sin θ
cos θ
2
1
2
1
1
2
1
1
ξ
ξ
x cos ψ
y sinψ
η
η cos θ
ζ sin θ
x cos θ sin ψ
y cos θ cos ψ
z sin θ
ζ
η sin θ
ζ cos θ
x sin θ sinψ
y sin θ cos ψ
z cos θ
2
ξ
2
η
2
ζ
θ
θ
15
1
ζ
1
ξ
1
η
ψ
ψ
O
x
y
z
Obrót wokół osi Oz
2
o kąt j (rotacja, kąt rotacji)
2
2
2
2
2
1
1
ξ
ξ cos φ η sin φ
x cos φ cos ψ
sin φ cos θ sinψ
y cos φ sin ψ
sin φ cos θ cos ψ
z sin φ sin θ
η
ξ sin φ η cos φ
x
sin φ cos ψ
cos φ cos θ sinψ
y
sin φ sin ψ
cos φ cos θ cos ψ
z cos φ sin θ
ζ
ξ
η sin θ
ζ cos θ
x sin θ sinψ
y sin θ cos ψ
z cos θ
2
ξ
2
η
2
ζ
θ
θ
ξ
η
ζ
φ
φ
2
2
2
0
0
0
0
1
ξ
cos φ
sin φ
ξ
η
sin φ cos φ
η
ζ
ζ
2
2
3
2
2
0
0
0
0
1
cos ξ ,ξ
c os η ,ξ
α
cos ξ ,η
cos η ,η
3
0
0
0
0
1
cos φ
sin φ
α
sin φ cos φ

16
ξ
cos φ cos ψ
sin φ cos θ sinψ
cos φ sinψ
sin φ cos θ cos ψ
sin φ sin θ
x
η
sin φ cos ψ
cos φ cos θ sinψ
sin φ sinψ
cos φ cos θ cos ψ
cos φ sin θ
y
ζ
sin θ sinψ
sin θ cos ψ
cos θ
z
cos φ cos ψ
sin φ cos θ sinψ
cos φ sinψ
sin φ cos θ cos ψ
sin φ sin θ
α
sin φ cos ψ
cos φ cos θ sinψ
sin φ sinψ
cos φ cos θ cos ψ
cos φ sin θ
sin θ sinψ
sin θ cos ψ
cos θ
Związek macierzowy pomiędzy współrzędnymi Eulera i Lagrange’a w opisie ruchu
obrotowego za pomocą kątów Eulera
Macierz przejścia z układu Oxyz do układu obróconego, opisanego za pomocą kątów Eulera

Część 2
Prędkości i przyspieszenia punktów ciała sztywnego
w ruchu dowolnym
18
A
r t
r t
AM
- wektor wodzący początku układu ruchomego
A
r t
2.1. Prędkość punktów ciała sztywnego w ruchu dowolnym
r t
- wektor wodzący w układzie nieruchomym
- prędkość unoszenia punktów ciała sztywnego
w ruchu dowolnym równa prędkości bezwzględnej
u
A
b
υ
r
ω AM
υ
AM
- wektor wodzący w układzie ruchomym
(niezależny od czasu)
b
υ
- prędkość bezwzględna
0
w
υ
- prędkość względna
A
w
w
u
b
r
r
ρ
ω ρ
υ
υ
υ
A
r t
r t
ρ t
- wektorowy opis ruchu punktu materialnego
w ruchu względnym
- prędkość w ruchu względnym
A
u
b
w
d
r
r
AM
ω ρ
υ
υ
dt
0
19
w
w
a
ρ
- przyspieszenie względne w ruchu względnym
A
w
w
w
w
c
u
b
r
r
ρ
ω ρ
ω ρ
ω
ρ
ω ρ
a
a
a
a
- przyspieszenie Coriolisa w ruchu względnym
2
c
w
a
ω ρ
- przyspieszenie unoszenia w ruchu względnym
u
A
a
r
ω ρ
ω
ω ρ
2.2. Przyspieszenie punktów ciała sztywnego w ruchu dowolnym
2
2
0
w
d
a
AM
dt
2
0
c
d
a
ω
AM
dt
u
A
b
a
r
ω AM
ω
ω AM
a
- przyspieszenie punktów ciała sztywnego
w ruchu dowolnym równe przyspieszeniu
bezwzględnemu
20
x
z
O
y
A
B
r
A
r
B
B
υ
A
υ
l
2.3. Twierdzenia o rozkładzie prędkości punktów ciała sztywnego
w ruchu dowolnym
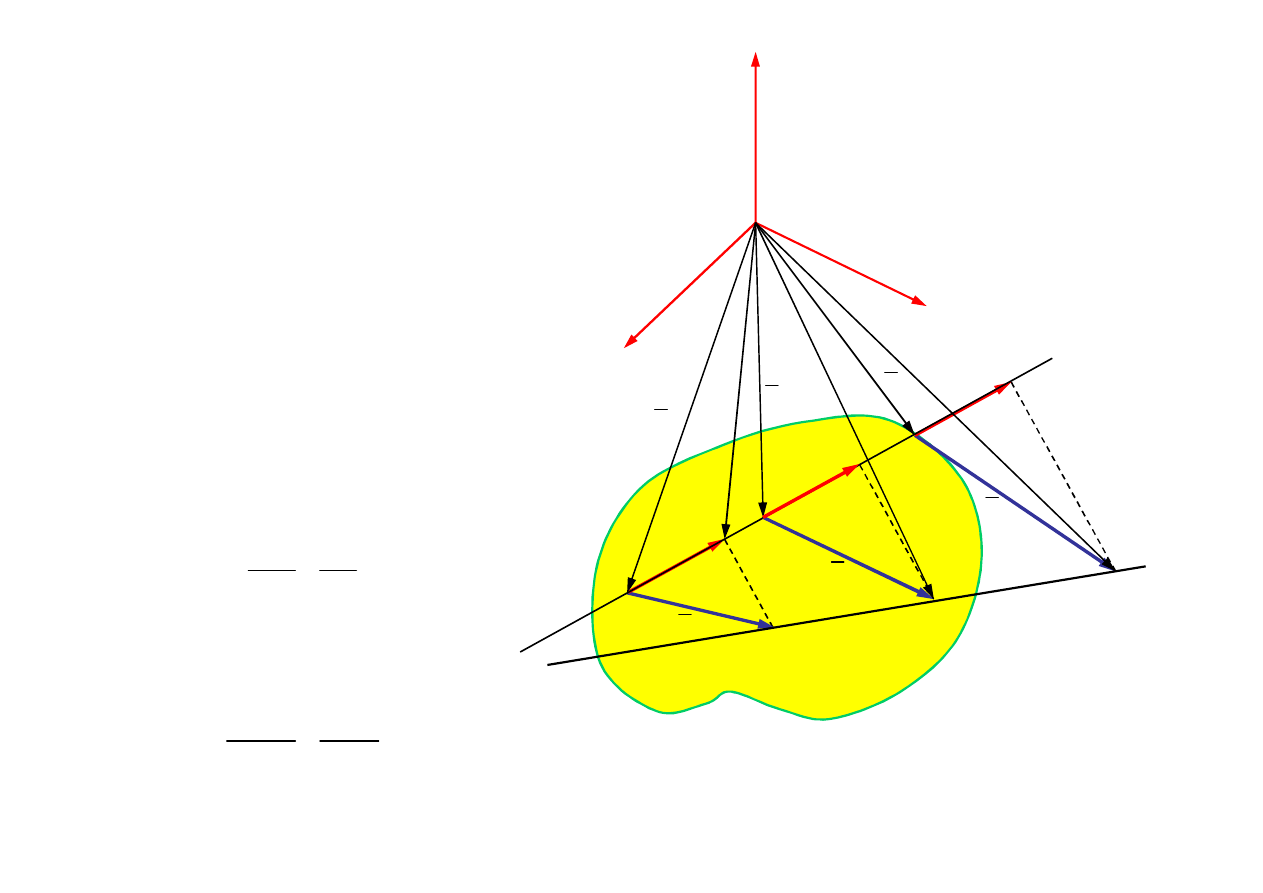
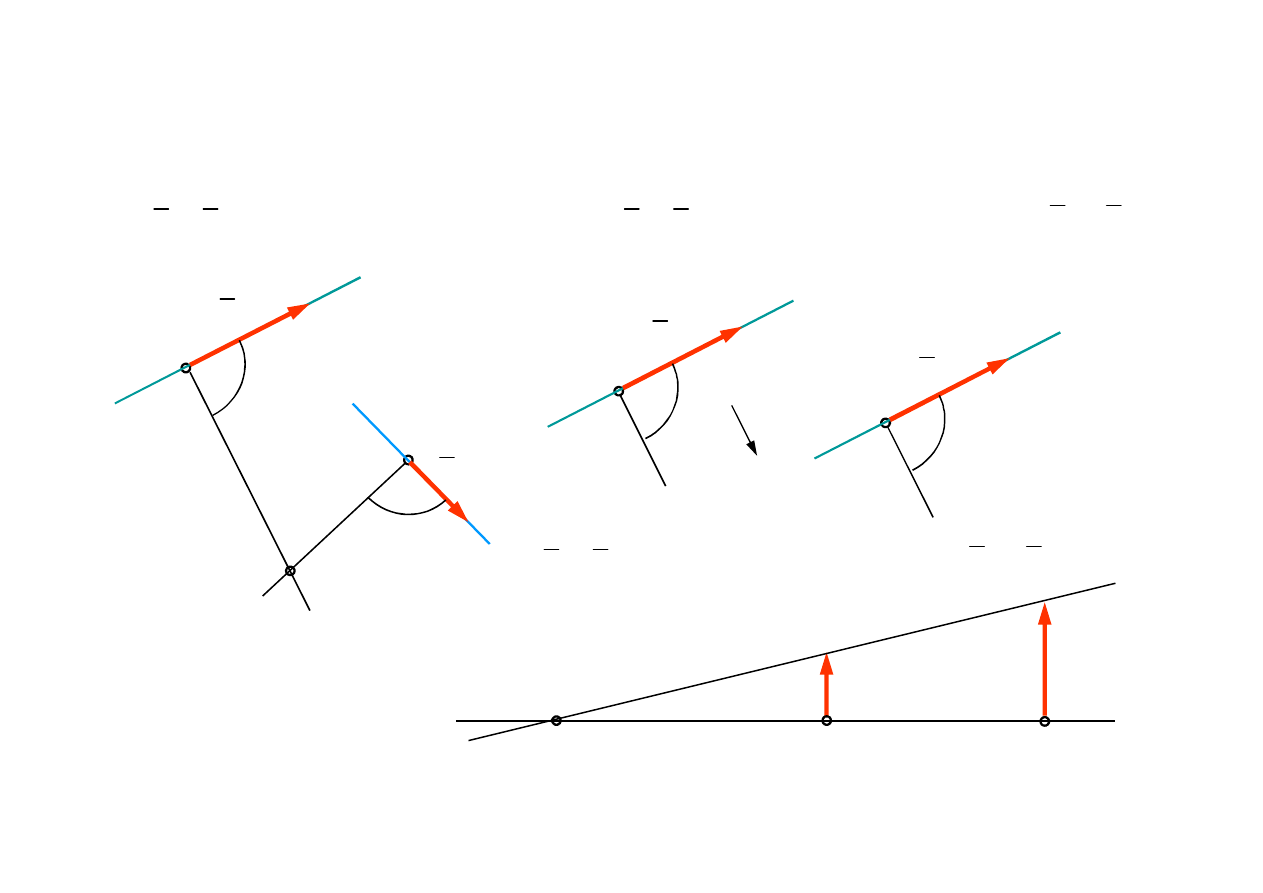
Twierdzenie 1
W ruchu dowolnym bryły sztywnej rzuty prędkości punktów leżących na
prostej na tę prostą są równe
B l
υ
A l
υ
α
β
21
x
z
O
y
A
B
r
A
r
B
l
B
υ
A
υ
B l
υ
A l
υ
α
β
Dowód twierdzenia 1
2
2
B
A
AB
r
r
const
2
2
0
B
A
d
AB
AB
AB υ
υ
dt
B
A
B
A
B
A
l
l
υ
AB
υ
AB
υ
AB cos α
υ
AB cos β
υ
υ
Z założenia o sztywności
ciała
Różniczkowanie po czasie
Wykorzystując definicję iloczynu skalarnego otrzymujemy
22
x
z
O
y
A
B
r
A
r
B
B
υ
A
υ
l
M
M
υ
M
r
A'
M '
B'
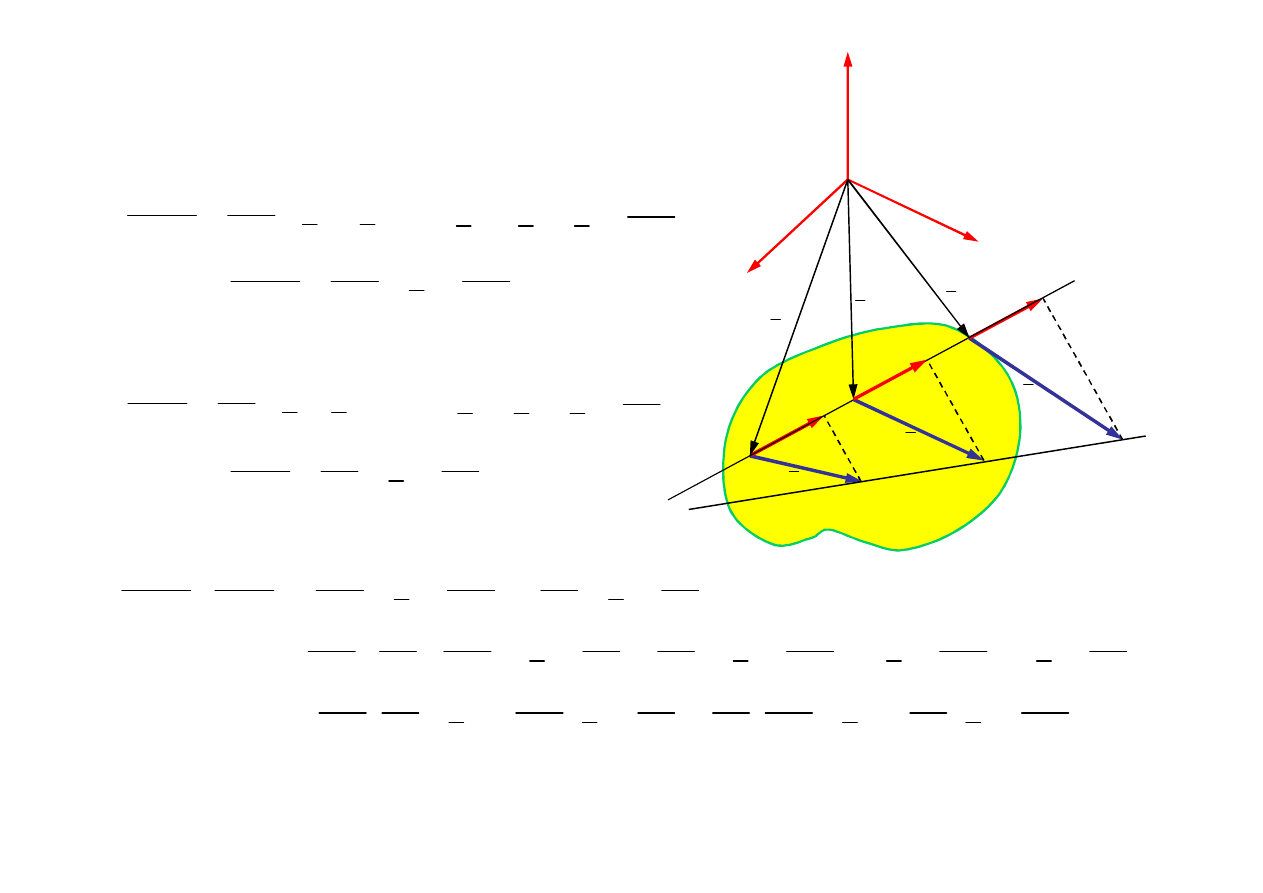
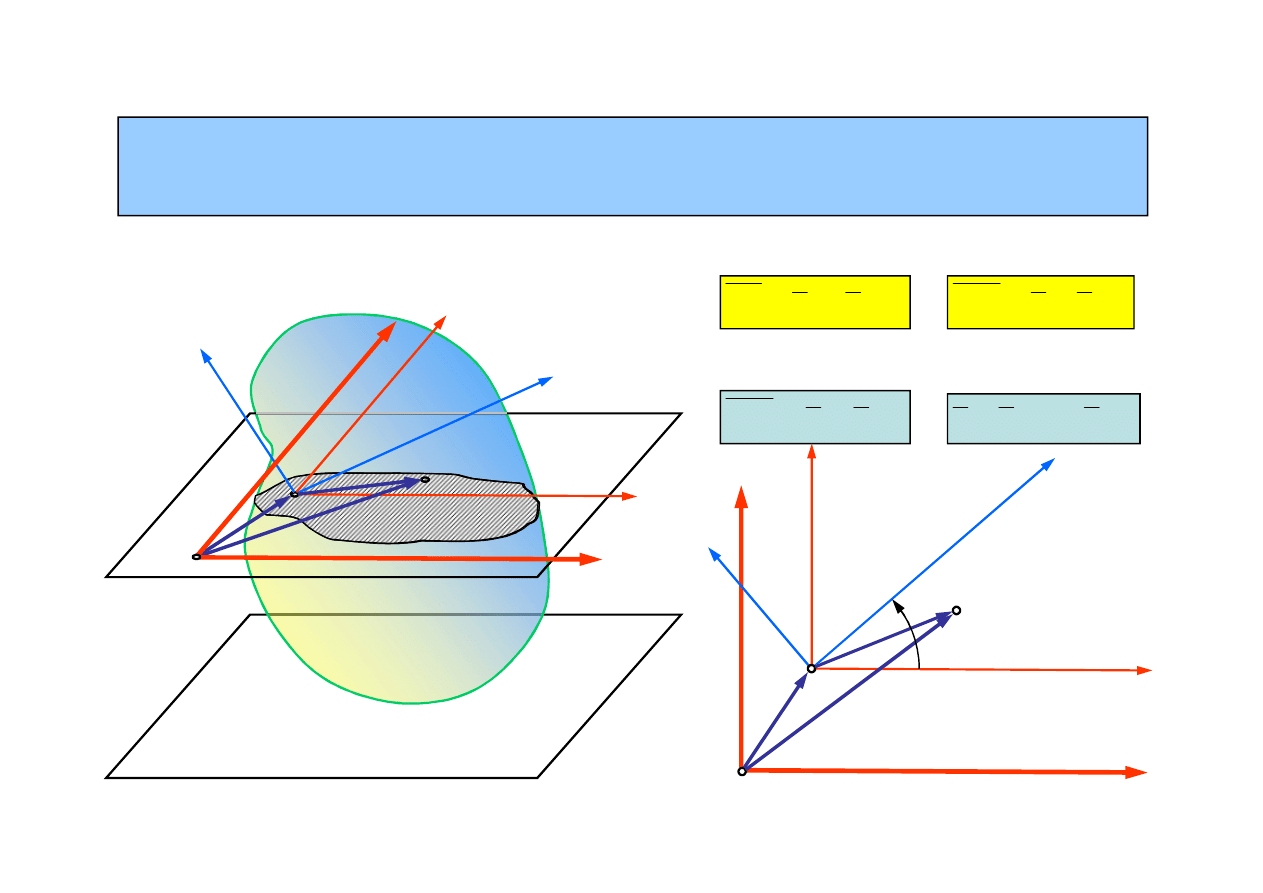
Twierdzenie 2
W ruchu dowolnym bryły sztywnej
końce wektorów prędkości
punktów leżących na prostej też
leżą na prostej
Teza
1. Rozważany obiekt to ciało sztywne
2. Punkty A, M, B leżą na prostej
Punkty A’, M’, B’ leżą na prostej
Założenie
0
AM
AB
0
A' M '
A' B'
23
Dowód twierdzenia 2
x
z
O
y
A
B
r
A
r
B
B
υ
A
υ
l
M
M
υ
M
r
A'
M '
B'
M
A
A' M '
AM
υ
υ
M
A
A
υ
υ
ω
AM
A
A' M '
AM
ω
AM
b
A
A' B'
AB υ
υ
B
A
A
υ
υ
ω
AB
A
A' B'
AB ω
AB
A
A
A
A
A
A
A
A
A
A
A' M '
A' B'
AM
ω
AM
AB ω
AB
AM
AB
AM
ω
AB
AB
ω
AM
ω
AM
ω
AB
AM AB ω
AM ω
AB
AB AM
ω
AB ω
AM
0

Część 3
Szczególne przypadki ruchu ciała sztywnego
25
Ruch kulisty
– ruch bryły sztywnej, w którym jeden punkt bryły jest nieruchomy
Bryła unieruchomiona w jednym punkcie ma
trzy stopnie swobody – są to obroty wokół
trzech osi przechodzących przez stały punkt
3.1. Ruch kulisty bryły
Nieruchomy punkt nazywamy środkiem ruchu
1
A
Kąty Eulera są współrzędnymi uogólnionymi,
które jednoznacznie określają ten ruch
Tory punktów bryły w ruchu kulistym leżą na
sferach kulistych o środku w punkcie
unieruchomienia
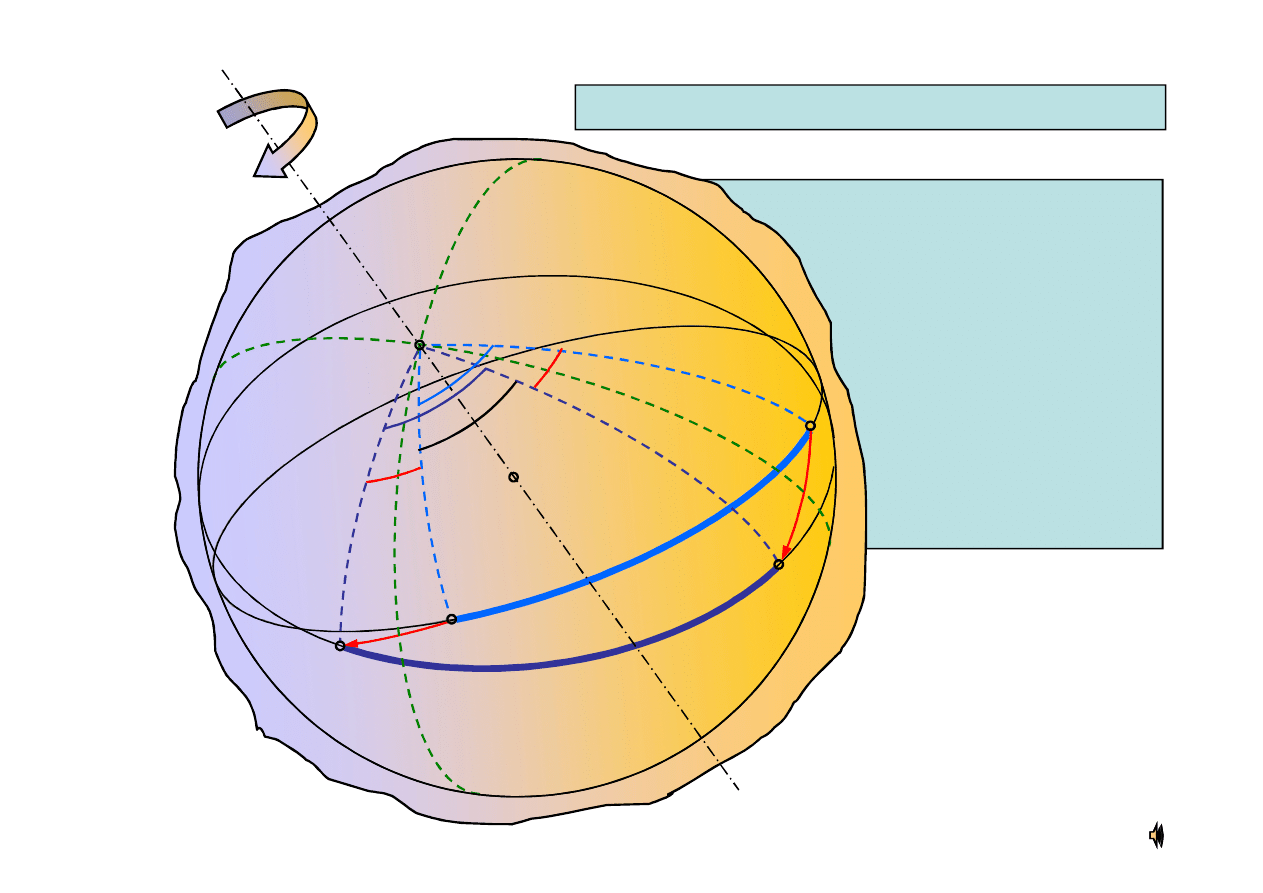
26
Jeżeli bryła jest w ruchu
kulistym i zajmuje
w kolejnych chwilach
dwa położenia to
istnieje taka oś
obrotu, względem
której można
przeprowadzić
bryłę z jednego
z tych położeń
w drugie
O
A
1
A
B
1
B
D
C
P
α
α
β
γ
γ
Twierdzenie d’Alamberta – Eulera
27
A
r t
r t
ρ t
- wektor wodzący początku układu ruchomego
(w ruchu kulistym równy 0)
A
r t
Prędkość punktów bryły sztywnej w ruchu kulistym
r t
- wektor wodzący w układzie nieruchomym
ρ t
- wektor wodzący punktu M w układzie
ruchomym (wyrażony we współrzędnych
materialnych jest niezależny od czasu)
Promień wodzący punktów bryły sztywnej we współrzędnych przestrzennych
x
y
z
x t , y t , z t
ρ t , ρ t , ρ t
T
x t
ξ
y t
α t
η
z t
ζ
α t
- macierz przejścia z układu nieruchomego do ruchomego odpowiednia
do sposobu opisu ruchu
Promień wodzący punktów bryły sztywnej – zależność wektorowa
r t
ρ t
28
- prędkość punktów ciała sztywnego w ruchu dowolnym
A
υ
r
ω ρ
Prędkość punktów ciała sztywnego w ruchu kulistym (zależność wektorowa)
υ t
ω t
ρ t
W ruchu kulistym
0
A
r
x
y
z
x
y
z
x
y
z
υ t ,υ
t ,υ t
ω t ,ω
t ,ω t
ρ t , ρ
t , ρ t
T
T
x
y
z
x
y
z
ξ
υ t ,υ
t ,υ t
ω t ,ω
t ,ω t
α t
η
ζ
Prędkość punktów ciała sztywnego w ruchu kulistym we współrzędnych
przestrzennych
29
Przyspieszenie punktów bryły sztywnej w ruchu kulistym
A
a
r
ω ρ
ω
ω ρ
- przyspieszenie punktów ciała sztywnego
w ruchu dowolnym
a t
ε t
ρ t
ω t
ω t
ρ t
Przyspieszenie punktów bryły sztywnej w ruchu kulistym – zależność wektorowa
x
y
z
x
y
z
x
y
z
T
T
x
y
z
a t
a t ,a t ,a t
ε t
ε t ,ε
t ,ε t
ω t
ω t ,ω t ,ω t
ξ
ρ t
ρ t , ρ t , ρ t
α t
η
ζ
Przyspieszenie punktów ciała sztywnego w ruchu kulistym we współrzędnych
przestrzennych
30
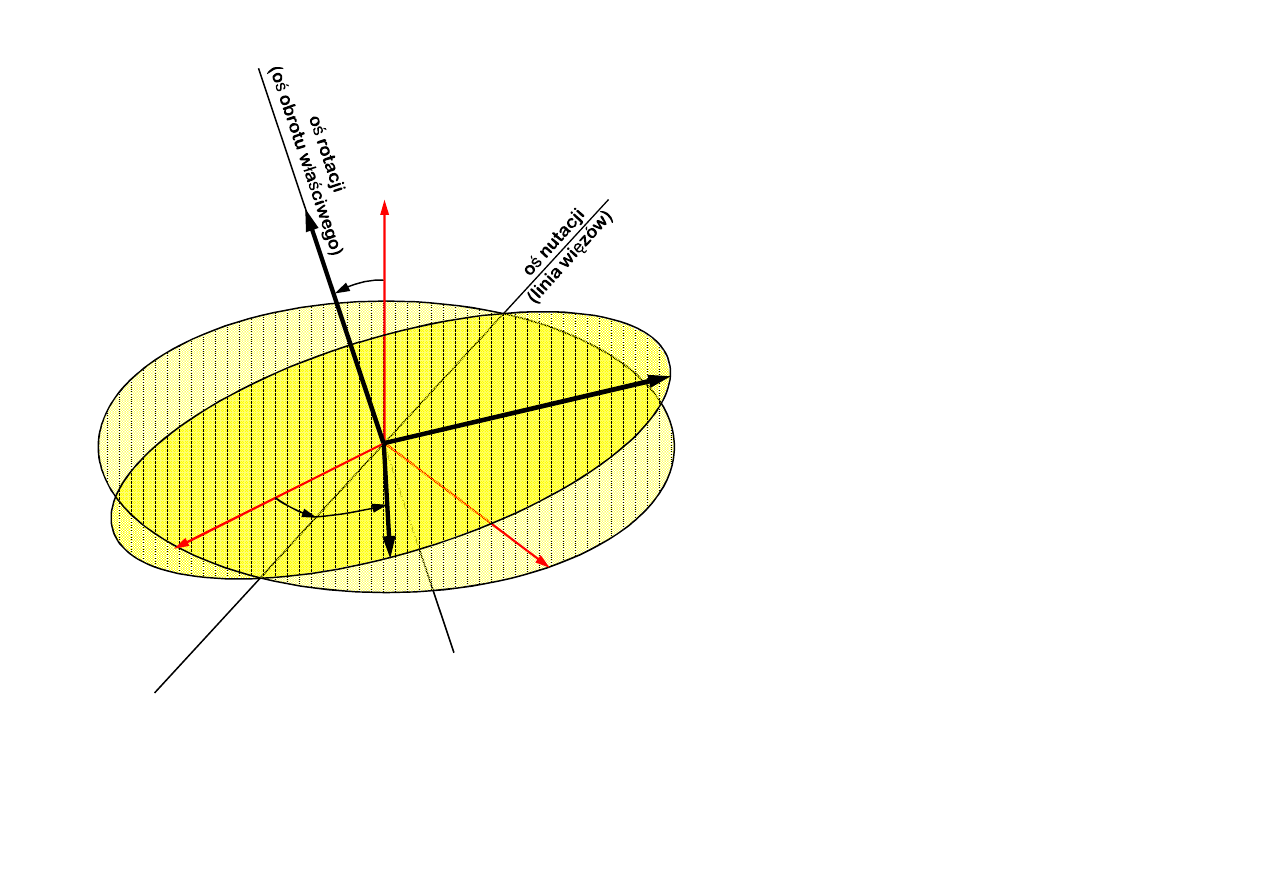
Ruch obrotowy
– ruch bryły sztywnej, w którym dwa punkty bryły są nieruchome
Bryła unieruchomiona w dwóch punktach ma
jeden stopień swobody – jest to obrót wokół
osi przechodzącej przez punkty stałe
3.2. Ruch obrotowy bryły sztywnej
Prostą przechodzącą przez dwa
nieruchome punkty nazywamy osią
obrotu
Spośród trzech kątów Eulera jednoznacznie
opisujących ten ruch tylko jeden jest
niezależny. W szczególnym przypadku, gdy
oś z, z lub linia więzów pokrywają się z osią
obrotu, dwa kąty Eulera są stałe
Torami punktów bryły w ruchu obrotowym są
okręgi leżące w płaszczyźnie prostopadłej do
osi obrotu, których środki leżą na tej osi
1
A
2
A
Ruch obrotowy jest szczególnym
przypadkiem ruchu kulistego. W tym ruchu
kierunek wektora prędkości kątowej jest stały
i pokrywa się z osią obrotu
31
oś
nut
acj
i
(lin
ia w
ięz
ów
)
o
ś
o
b
ro
tu
o
ś
ro
ta
c
ji
(o
ś
o
br
o
tu
w
ła
ś
c
iw
e
go
)
O
ś
o
b
ro
tu
l
O
ś
o
b
ro
tu
l
M
l
ω
M
O
l
ω
ψ
ψ t , θ
const , φ
co nst
32
0
Π
Płaszczyzna kierująca
Ruch płaski
– ruch bryły sztywnej, w którym wszystkie punkty bryły poruszają się
w płaszczyznach równoległych do jednej płaszczyzny zwanej
płaszczyzną kierującą
3.3. Ruch płaski bryły sztywnej
Π
A
M
1
x
1
y
ξ
η
O
x
y
A
A
OA
r
r t
OM
r
r t
AM
ρ
ρ t
A
r
r t
ρ t
Opis tylko w układzie bezwzględnym
Opis w układzie przestrzennym i materialnym
O
x
y
M
ξ
η
1
x
1
y
A
φ
33
Ruch płaski bryły sztywnej jest jednoznacznie opisany za pomocą trzech
współrzędnych uogólnionych:
A
A
x
t , y
t
φ t
- współrzędne ustalonego punktu A określające translację
- kąt obrotu bryły wokół ustalonego punktu A
Własności ruchu płaskiego
Tory punktów leżą w płaszczyznach równoległych do płaszczyzny kierującej
Kierunek wektora prędkości obrotowej jest prostopadły do płaszczyzny kierującej
Ruch płaski jest złożeniem ruchu postępowego ustalonego punktu i ruchu obrotowego
wokół tego punktu
34
0
0
0
0
1
A
A
A
cos α t
sin α t
x t
x
t
ξ
y t
y
t
sin α t
cos α t
η
z t
z
ζ
0
0
0
0
1
cos α t
sin α t
α t
sin α t
cos α t
Współrzędne dowolnego punktu M w ruchu płaskim bryły sztywnej
A
r t
r t
ρ t
A
A
A
x
y
z
x t , y t ,z t
x
t , y
t ,z
ρ t , ρ t , ρ
T
T
A
A
A
ξ
x t , y t ,z t
x
t , y
t ,z
α t
η
ζ
35
Prędkość punktów bryły sztywnej w ruchu płaskim
- prędkość punktów ciała sztywnego w ruchu dowolnym
A
υ
r
ω ρ
Prędkość punktów ciała sztywnego w ruchu płaskim (zależność wektorowa)
A
υ t
υ
t
ω t
ρ t
0
0 0
x
y
z
Ax
Ay
z
x
y
z
υ t ,υ
t ,υ t
υ
t ,υ
t ,
, ,ω t
ρ
t , ρ
t , ρ
0
0 0
T
T
x
y
z
Ax
Ay
z
ξ
υ t ,υ
t ,υ t
υ
t ,υ
t ,
, ,ω t
α t
η
ζ
Prędkość punktów ciała sztywnego w ruchu płaskim we współrzędnych
przestrzennych
36
Przyspieszenie punktów bryły sztywnej w ruchu płaskim
A
a
r
ω ρ
ω
ω ρ
- przyspieszenie punktów ciała sztywnego
w ruchu dowolnym
A
a t
a
t
ε t
ρ t
ω t
ω t
ρ t
Przyspieszenie punktów bryły sztywnej w ruchu płaskim – zależność wektorowa
0
0 0
0 0
x
y
z
A
Ax
Ay
z
z
T
T
x
y
z
a t
a t ,a
t ,a t
a
t
a
t ,a
t ,
ε t
, ,ε t
ω t
, ,ω t
ξ
ρ t
ρ t , ρ t , ρ
α t
η
ζ
Przyspieszenie punktów ciała sztywnego w ruchu płaskim we współrzędnych
przestrzennych
37
0
P
A
A
P
A
υ
υ
ω
r
r
Chwilowy środek obrotu jest to punkt płaszczyzny, który w danej chwili w ruchu płaskim
bryły sztywnej jest nieruchomy. Chwilowy środek obrotu nie musi być punktem bryły.
Chwilowy środek obrotu
A
ω
/
0
P
A
A
A
A
P
A
υ
ω
υ
ω
ω
r
r
2
0
A
A
A
A
P
A
A
P
A
ω
υ
ω
ω
r
r
ω
r
r
2
A
A
P
A
A
ω
υ
r
r
ω
Powyższa zależność pozwala wyznaczyć położenie chwilowego środka obrotu
w ogólnym przypadku
38
Wyznaczanie chwilowego środka obrotu w oparciu o znane prędkości dwóch punktów
0
A
B
υ
υ
A
υ
B
υ
(kierunki równoległe) oraz
A
B
P
0
A
B
υ
υ
(kierunki nie równoległe)
A
B
υ
υ
A
υ
A
B
υ
B
P
0
A
B
υ
υ
(kierunki równoległe) oraz
A
B
υ
υ
P
A
B
Uwaga: w tym przypadku prędkości muszą być znane
39
Ruch ogólny
– ruch bryły sztywnej, opisany sześcioma współrzędnymi
uogólnionymi, z których każda jest funkcją czasu
3.4. Ogólny przypadek ruchu bryły sztywnej
A
A
x
x
t
A
A
y
y
t
A
A
z
z
t
φ
φ t
ψ
ψ t
θ
θ t
- współrzędne ustalonego
punktu
- kąty Eulera
Współrzędne dowolnego punktu M w ruchu dowolnym bryły sztywnej
A
r t
r t
ρ t
A
A
A
x
y
z
x t , y t ,z t
x
t , y
t ,z
t
ρ t , ρ t , ρ t
T
T
A
A
A
ξ
x t , y t ,z t
x
t , y
t ,z
t
α t
η
ζ
40
Prędkość punktów bryły sztywnej w ruchu dowolnym
- prędkość punktów ciała sztywnego w ruchu dowolnym
A
υ
r
ω ρ
Prędkość punktów ciała sztywnego w ruchu dowolnym (zależność wektorowa)
A
υ t
υ
t
ω t
ρ t
x
y
z
Ax
Ay
Az
x
y
z
x
y
z
υ t ,υ
t ,υ t
υ
t ,υ
t ,υ
t
ω t ,ω
t ,ω t
ρ
t , ρ
t , ρ t
T
T
x
y
z
Ax
Ay
Az
x
y
z
ξ
υ t ,υ
t ,υ t
υ
t ,υ
t ,υ
t
ω t ,ω
t ,ω t
α t
η
ζ
Prędkość punktów ciała sztywnego w ruchu dowolnym we współrzędnych
przestrzennych
41
Przyspieszenie punktów bryły sztywnej w ruchu dowolnym
A
a
r
ω ρ
ω
ω ρ
- przyspieszenie punktów ciała sztywnego
w ruchu dowolnym
A
a t
a
t
ε t
ρ t
ω t
ω t
ρ t
Przyspieszenie punktów bryły sztywnej w ruchu dowolnym – zależność wektorowa
x
y
z
A
Ax
Ay
Az
x
y
z
x
y
z
T
T
x
y
z
a t
a t ,a t ,a t
a
t
a
t ,a
t ,a
t
ε t
ε t ,ε
t ,ε t
ω t
ω t ,ω t ,ω t
ξ
ρ t
ρ t , ρ t , ρ t
α t
η
ζ
Przyspieszenie punktów ciała sztywnego w ruchu dowolnym we współrzędnych
przestrzennych

Część 4
Wyznaczanie prędkości kątowej i przyspieszenia kątowego
za pomocą kątów Eulera
43
O
x
y
z
θ
ζ
ξ
φ
η
ψ
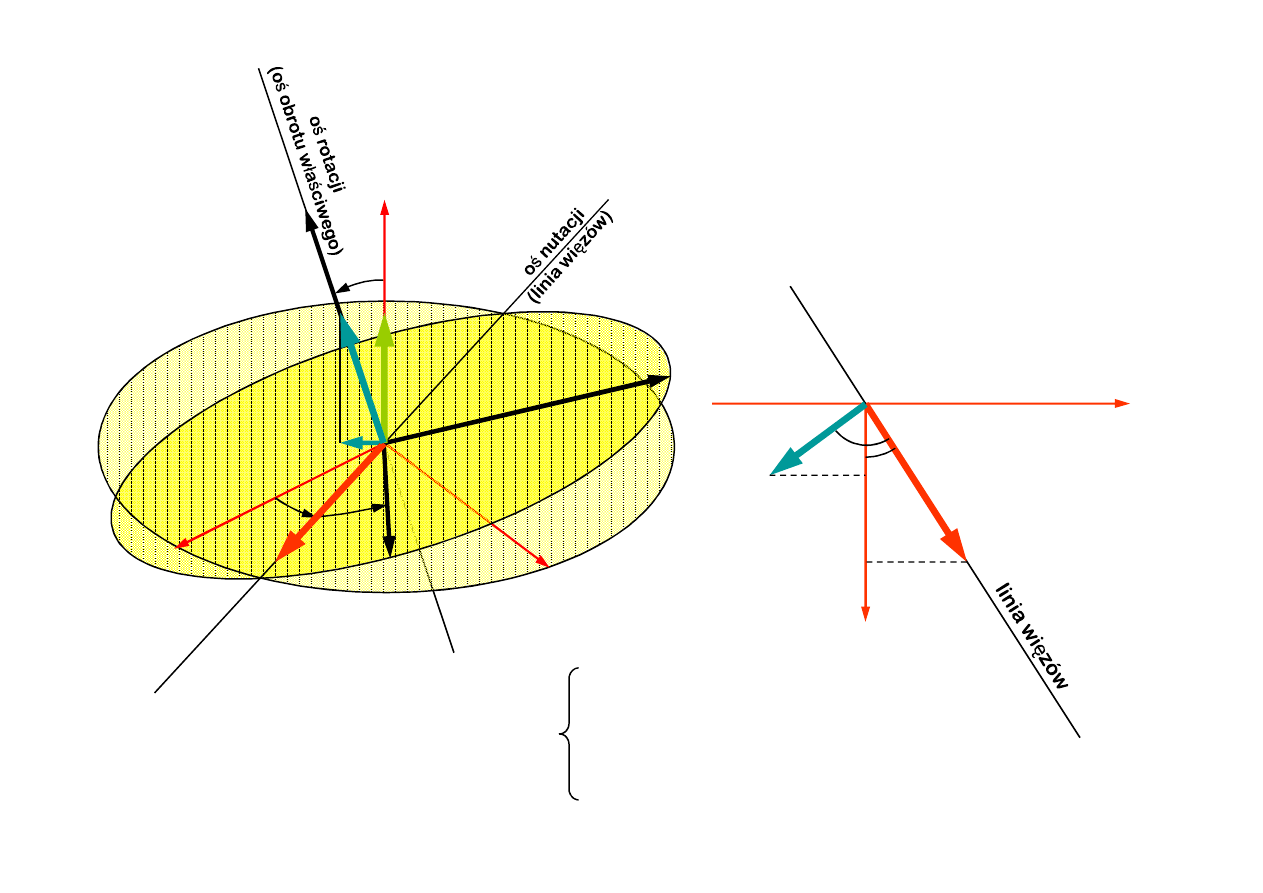
4.1. Wyznaczenie prędkości kątowych
Widok od osi z
φ
ψ
θ
θ
φ sinθ
ψ
y
x
x
y
z
ω
φ sinθ sinψ
θ cos ψ
ω
φ sinθ cosψ
θ sinψ
ω
ψ
φcos θ
Współrzędne wektora prędkości
kątowej w układzie Oxyz
44
O
x
y
z
θ
ζ
ξ
φ
η
ψ
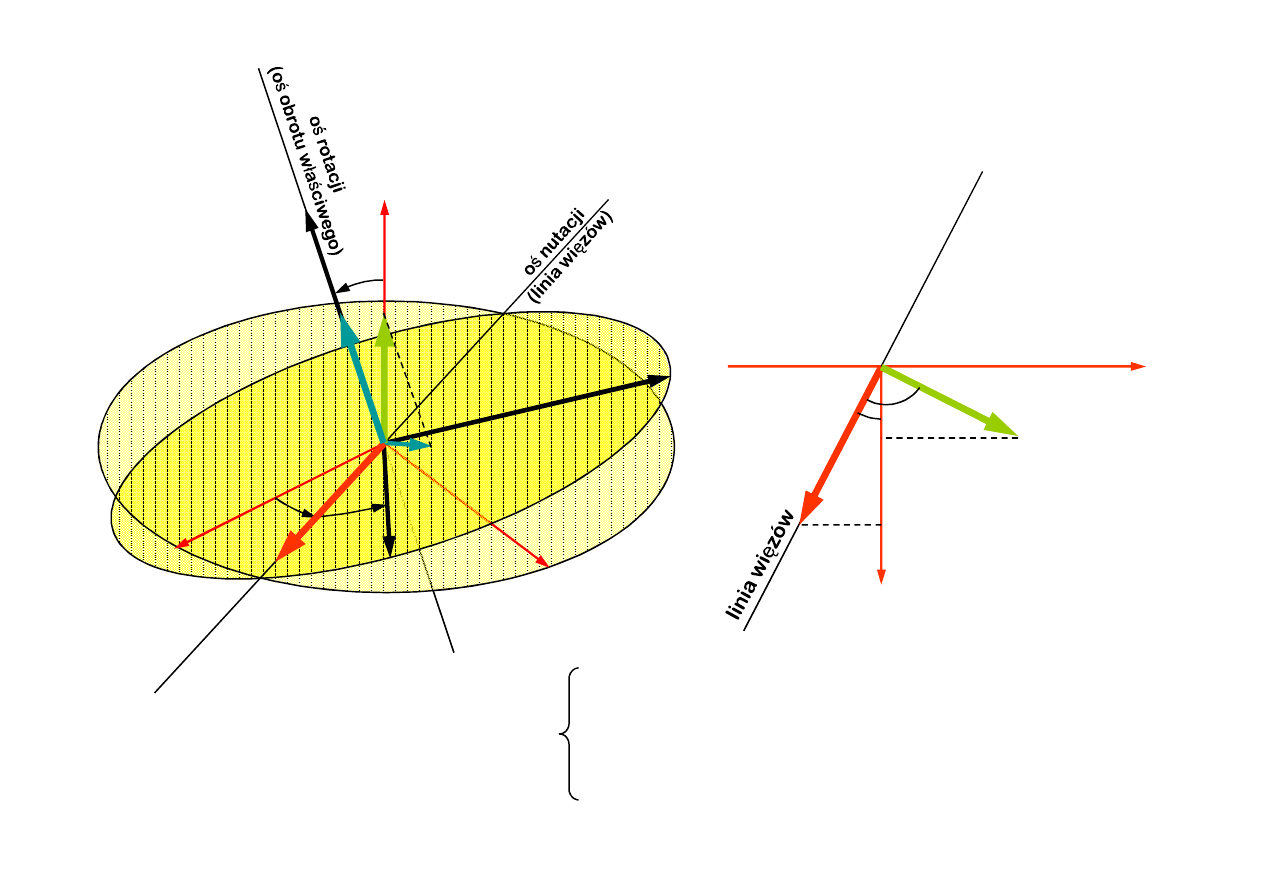
Widok od osi z
φ
ψ
θ
θ
ψ sin θ
φ
η
ξ
ξ
η
ζ
ω
ψ sinθ sin φ θ cos φ
ω
ψ sin θ cos φ θ sin φ
ω
φ ψ cos θ
Współrzędne wektora prędkości
kątowej w układzie Oxhz

45
Wyszukiwarka
Podobne podstrony:
MT st w 04 cz1 [tryb zgodności]
MT st w 04 cz2 [tryb zgodności]
MT st w 04 cz2 [tryb zgodno┼Ťci]
MT st w 04 cz1 [tryb zgodno┼Ťci]
MT st w 08 [tryb zgodności]
MT st w 06 [tryb zgodności]
MT st w 05 [tryb zgodności]
MT st w 07 [tryb zgodności]
MT st w 03 [tryb zgodno┼Ťci]
MT st w 02a [tryb zgodno┼Ťci]
MT st w 02 [tryb zgodno┼Ťci]
MT st w 10 [tryb zgodności]
MT st w 06 [tryb zgodności]
MT st w 041 [tryb zgodno┼Ťci]
MT st w 10 [tryb zgodno┼Ťci]
MT st w 11 [tryb zgodno┼Ťci]
więcej podobnych podstron