PODSTAWY STEROWANIA LOGICZNEGO
LABORATORIUM SYSTEMÓW STEROWANIA PRZEMYSŁOWEGO I AUTOMATYKI BUDYNKÓW
KATEDRA AUTOMATYKI NAPĘDU I URZĄDZEŃ PRZEMYSŁOWYCH
AKADEMIA GÓRNICZO-HUTNICZA
WWW.KANIUP.AGH.EDU.PL
WWW.AGH.EDU.PL
Temat:
Przerzutniki
Grupa:
układy sekwencyjne
Obiekt:
modele zrealizowane w pakiecie symulacyjnym Program ćwiczenia:
1. Zamodelować wykorzystując podstawowe bramki i przebadać struktury przerzutników RS:
• z przewagą R
• z przewagą S
Wyniki zestawić w tabelach prawdy oraz narysować schematy układów przekaźnikowych realizujących te same funkcje.
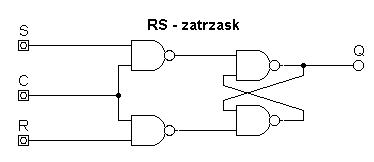
2. Zamodelować wykorzystując podstawowe bramki i przebadać przerzutnik typu zatrzask (latch)
• W modelu zrealizować funkcję Q = E ⋅ D + E ⋅ D ⋅ Q , gdzie Q – wyjście, E – wejście sterujące, D – wejście informacyjne.
• Sporządzić tabelę prawdy.
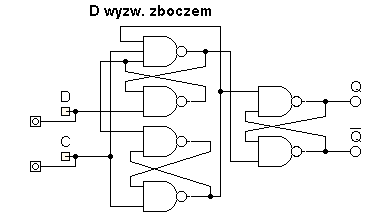
3. Zamodelować przerzutnik typu „D” wykorzystując podstawowe bramki i przebadać.
• Sporządzić tabelę prawdy.
• Zrealizować „dwójkę liczącą” przez sprzężenie z Q na D i przebadać.
• Sporządzić tabelę prawdy.
• Przeprowadzić porównanie przerzutników typu: „zatrzask” i „D”
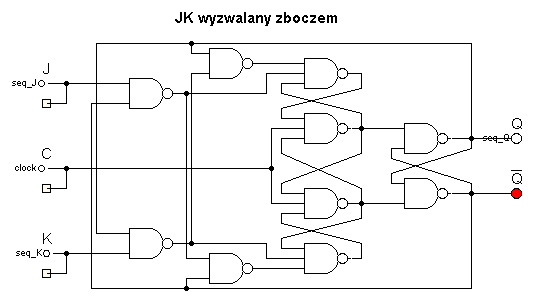
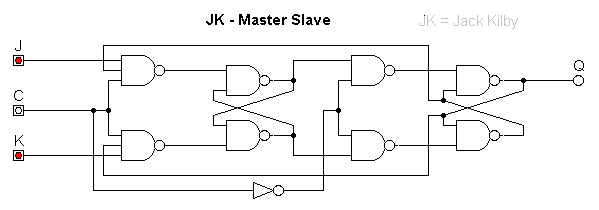
4. Zamodelować przerzutnik typu „JK” wykorzystując podstawowe bramki i przebadać.
• Sporządzić tabelę prawdy.
• Zrealizować „dwójkę liczącą” przez odpowiednie połączenia wejść J i K
5. Stosując standardowe przerzutniki i bramki przeprowadzić konwersję:
• Przerzutnika „JK” w przerzutnik „D”
• Przerzutnika „D” w przerzutnik „JK”
6. Dla modeli z p. 3 i 4 narysować diagram stanu.
PSL-S-01 Przerzutniki
1/2
Przykłady implementacji przerzutników
PSL-S-01 Przerzutniki
2/2
Wyszukiwarka
Podobne podstrony:
PSL-101-Przerzutniki
TC-S-01 Przerzutniki by grze
PSL-K-01 Bramki
Sprawozdanie PSL K 01 Funktory i prawa? Morgana
przerzutniki 01
2016 01 14 Rząd PO PSL przez lata lekceważył i zbywał opiekunów niepełnosprawnych
TD 01
Ubytki,niepr,poch poł(16 01 2008)
01 E CELE PODSTAWYid 3061 ppt
01 Podstawy i technika
01 Pomoc i wsparcie rodziny patologicznej polski system pomocy ofiarom przemocy w rodzinieid 2637 p
zapotrzebowanie ustroju na skladniki odzywcze 12 01 2009 kurs dla pielegniarek (2)
01 Badania neurologicz 1id 2599 ppt
01 AiPP Wstep
PA2 8 przerzutniki synchron
ANALIZA 01
01 WPROWADZENIA
więcej podobnych podstron