DYNAMIKA I STABILNOŚĆ
5.1.
Odpowiedź układu drugiego rzędu
5.2.
Ekstrema odpowiedzi oscylacyjnej
5.3.
Wpływ dodatkowego zera i bieguna
5.4.
Upraszczanie transmitancji wyższych rzędów 5.5.
Eliminacja przeregulowania przez filtrację wielkości zadanej 5.6.
Stabilność układów ze sprzężeniem zwrotnym
Odpowiedź układu drugiego rzędu
• Serwomechanizm ze sterowaniem prą dowym (Wykład 1) w
k
y
2
s
k
k
P
=
α = T
J
d
1 + s
α
sprzężenie tachometryczne i pozycyjne
Transmitancja:
k
Y ( s
2
) =
s
=
k
=
W ( s)
1
( + s
α ) k
s 2 + α ks +
1 +
k
s 2
2
ω n
= 2
2
s + 2ξω s + ω
n
n
gdzie: ω - częstotliwość drgań naturalnych (niegasnących) n
ξ - współczynnik tłumienia
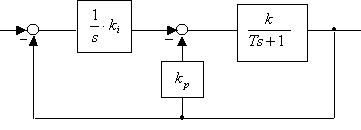
• Układ regulacji poziomu (Wykład 3)
„Rozdzielony” reulator PI
I
O
w
1 k
k
p
y
s T
Ts +1
i
k
P
p
w
y
I
O
P
1
1 k
1
k
PI:
k 1
( +
) = k
p
+
= k + k ,
gdzie
p
k =
p
T s
p
s T
p
i s
i
T
i
i
i
k
k
I
i
Y ( s)
1 +
IO
OP
s Ts +
=
=
=
1
=
W ( s)
O
1 + PO + IO
k
k
k
1 + I
1 + k p
+ i
1 + OP
Ts + 1
s Ts + 1
k k
i
2
ω
=
k k
i
=
T
=
n
Ts 2 + s 1
( + k k)
1
2
2
s + 2ξω s + ω
p
+ k k
+ k k
i
s 2 +
p
s + k k
i
n
n
T
T
Gdyby cały regulator PI był w torze głównym, to nie otrzymalibyśmy standardowej transmitancji 2-go rzędu
(nastąpiłaby zmiana w liczniku). Struktura rozdzielona jest preferowana przez praktyków dla uniknięcia przeregulowania (zob. dalej).
Uwaga.
Proste
serwomechanizmy
i
układy
automatyzacji
procesów
są
opisane
standardowymi transmitancjami 2-go rzędu.
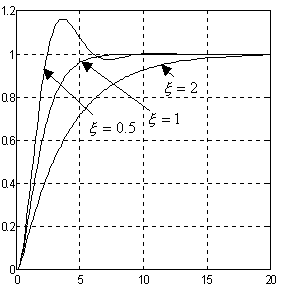
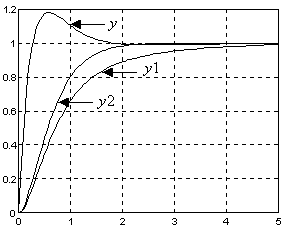
Odpowiedź skokowa
1
W ( s) = s
2
ω
1
Y ( s
n
) =
⋅
s 2 + 2ξω s
2
+ ω s
n
n
∆ = 4 2 2
ξ ω n − 4 2
ω n = 4 2
ω ( 2
n ξ
− )
1
Kształt odpowiedzi zależy od współczynnika tłumienia ξ.
• ξ >1 ⇒
∆ >0
Dwa pierwiastki rzeczywiste różne: − s , − s 1
2
takie, że (− s ⋅ − s = ω
1 ) (
)
2
2
n
2
ω
1
R
R
R
n
0
1
2
Y ( s) =
=
+
+
( s + s )( s + s ) s
s
s + s
s + s
1
2
1
2
Residua R , R , R oblicza się metodą przesłaniania.
0
1
2
2
2
ω
ω
R =
n
= n = 1
0
(− s ) ( s )
2
ω
1
2
n
1
1
Oznaczmy
s =
, s =
1
T
2
T
1
2
2
ω
(− s ) (− s )
s
T
T
1
2
2
2
1
R
n
=
=
= −
= −
= −
1
s( s + s )
− ( s ) ( s − s )
s − s
1
1
T − T
2
1
2
1
2
1
1
2
s = − s
−
1
T
T
2
1
Podobnie
T 2
R =
2
T − T
1
2
t
t
−
−
1
T
T
1
T
2
2
y( t) = 1
T
−
e
+
e
−
−
1
T
2
T
1
T
2
T
Jest to tzw. przebieg aperiodyczny zwykły.
• ξ =1 ⇒
∆ =0
Jeden pierwiastek podwójny: − s ,12 = ω n
2
ω
1
1
1
1
Y ( s
n
) =
=
,
= T ,
( s + ω )2 s
1
ω
2
s
n
(
s + )
1
n
ω n
1
1
Y ( s) = T
( s
)
1 2
+
s
Z tablic transformaty Laplace’a:
t
t
− T
y t
( ) = 1 − 1
( +
) e
T
Jest
to
przebieg
aperiodyczny
krytyczny.
Na
taki
przebieg
nastawia
się
serwomechanizmy.
• ξ <1 ⇒
∆ <0
Dwa pierwiastki zespolone:
s
1
,
,
1
= −ξω ± j
− 2
2
=
±
n
ω n
ξ
σ jω
gdzie
ω - częstotliwość drgań tłumionych
2
2
( s − s )( s − s ) = ( s − σ ) + ω
1
2
2
ω
1
Y ( s
n
) = ( s −σ)2
2
+ ω s
R
C( s − σ ) + Sω
0
Y ( s) =
+
2
2
s
( s − σ ) + ω
2
2
ω
ω
=
n
R
= n = 1
0
2
2
2
σ + ω
ω n
Amplitudy S, C
Sω
⇒ Seσ t sin ω t
( s − σ )2 + ω 2
C( s − σ )
⇒ Ceσ t cosω t
( s − σ )2 + ω 2
Zachodzi wzór
1
2
2
1 ω 2
2
n
1
ω
S + jC =
[{( s−σ) +ω ] Y( s)}
= (
)
=
n
=
ω
s σ
jω
ω s
ω σ +
= +
jω
s =σ + jω
2
ω σ
ω
1
σ
ξω
n
− j
−
=
=
(σ − jω) =
− j =
n
− j =
2
ω σ + 2
2
ω
ω
ω
ω 1 ξ
n
−
−
=
ξ − j = S + jC
− 2
1 ξ
Zatem
−ξ
S =
,
C = 1
−
2
1 − ξ
Odpowiedź
y( t) = 1 + e t
σ ( S sin ω t + C cos t
ω )
Przekształcanie trygonometryczne
sin(α + β ) = sin α cos β + cosα sin β ,
gdzie α = t
ω
S
C
S sin ω t + C cosω t =
2
S +
2
C
(sin ω t
+ cosω t
) =
2
S + 2
2
C
S +
2
C
4
1
4
2
3
4
1
4
2
3
cos β
sin β
β ≡ φ
2
2
= S + C sin(ω t + φ)
sin β
C
1 − ξ 2
φ =
1
ar ctg
= ar ctg
=
,
2
2
S + C =
cos β
ar ctg
S
ξ
2
1 − ξ
1
ξ
− ω
(
y t ) = 1 −
e
t
n
sin(ω t + φ )
−ξ 2
1
Jest to przebieg oscylacyjny.
Matlab
omn=1
l=omn^2
% ξ >1
y
ksi=2
m=[1 2*ksi*omn omn^2]
t=0:0.1:20
y=step(l,m,t)
% ξ =1
ksi=1
m=[1 2*ksi*omn omn^2]
t=0:0.1:20
y1=step(l,m,t)
% ξ <1
ksi=0.5
m=[1 2*ksi*omn omn^2]
t=0:0.1:20
t
y2=step(l,m,t)
plot(t,y,t,y1,t,y2),grid
Uwaga.
Na lekko oscylacyjne przebiegi nastawia się układy automatyzacji procesów technologicznych (ciśnienie, poziom, przepływ) ze względu na dobre tłumienie zakłóceń.
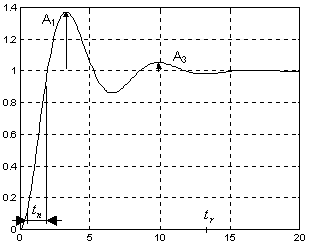
5.2.
Ekstrema odpowiedzi oscylacyjnej
W celu wyznaczenia ekstremów odpowiedzi oscylacyjnej II rzędu można zastosować jedną z dwóch metod:
dy
-
policzenie pochodnej
w sposób tradycyjny i przyrównanie jej do zera (metoda
dt
często pracochłonna),
-
skorzystanie z właściwości transformaty Laplace’a, czyli z wzoru na transformatę pochodnej
2
1
ω
ω
n
∂ y
ω
ω
1
= −
L [
2
s Y ( s)]
1
= −
L
= n eσ t sin ω t = 0
∂ t
( s − σ )2
2
+ω ω
ω
π
t = π , π
2 , π
3 ...
ω =
=
i
,
t
i
i
π ,
t
i
i
ω
π
t =
i
i =
i
,
,
1 ,
2
.
3 ..
2
ω
−
n
1 ξ
π
π
t 1 =
=
ω 1
n
− ξ 2
ω
σ t
ω
ω
1
A = y(
1
1
t ) −1 = 1 + e
( S sin 1 t + C cos 1 t) =
=
σ
σ
σ
1 +
1
t
e
( S sinπ + C cosπ ) = −
1
t
C e
=
1
t
e
=
π
− ξ
2
π
1 ξ
−
= e
,
ponieważ σ = − ξω
t =
n ,
a
1
2
ω 1
n
−ξ
Parametry odpowiedzi oscylacyjnej:
-
przeregulowanie p% = A ⋅10 %
0
1
-
czas regulacji tr
-
czas narastania tn
A
-
stopień tłumienia
3
d = A 1
Przykład
ω n =1
ξ = 3
.
0
1
T =
= .
3 333
ξω n
tr ≈ 4 T = 13 3
. 32
πξ
−
2
−ξ
p% = A ⋅100%
1
= e
⋅100%
1
p%
ln 100
ξ =
p
2
2
%
π + ln 100
Zależ ność p%(ξ )
100
P%
90
80
Matlab
70
60
ksi=0.01:0.01:0.99;
50
p=exp(-pi*ksi./sqrt(1-ksi.*ksi))*100
40
plot(ksi,p),grid
30
20
10
00
0.2
0.4
0.6
0.8
1
ξ
Wzór przybliżony:
% ≈
ξ
p
1
( −
) ⋅100%
0 6
.
100
P%
90
Matlab
80
70
ksi=0.01:0.01:0.6
60
p=exp(-pi*ksi./sqrt(1-ksi.*ksi))*100
50
paproks=(1-ksi/0.6)*100
40
plot(ksi,p,ksi,paproks),grid
30
20
10
00
0.1
0.2
0.3
0.4
0.5
0.6
ξ
t
t
− T
e
T
0.0
1.0
4
1.0
0.3679
t =
r 2% ξω n
2.0
0.1353
3.0
0.0495
≅5%
3
6
.
4
4.0
0.0183
≅2%
t =
,
t =
r
r
5% ξω
1% ξω
n
n
4.6
0.0100
1%
• Czas narastania tn
Od 10% do 90%
⇒
z wykresu można otrzymać przybliżony wzór:
.
1 8
t = ±
n
ω n
• Stopień tłumienia d
2πξ
ξω t
−
2
n 3
2
A
e
−ξ
p%
3
1
d =
=
= e
=
ξω n 1
A
e
t
100
1
Tylko dla układu II rzędu stopień tłumienia jest kwadratem przeregulowania.
Uwaga. Technolodzy preferują małe d, aby oscylacje zanikały jak najszybciej.
Przykład.
Dla serwomachanizmu prądowego (zob. wcześniej) znaleźć k i α , gdy dane są: Tzam= 0.1, p% = 0.
p% oznacza ξ = 1 – przebiegi aperiodyczne krytyczne.
4
4
t
T
ω
r =
=
= 4 zam = 4
.
0
⇒
n = 10
ξω
ω
n
n
2
k
ω n
G
=
=
zam
2
2
2
s + k s
α + k s + 2ξω +ω
n
n
ξ
2 ω = α
k
,
2
k = ω
⇒ k = 100 , α = 0 2
.
n
n
Przykład.
Dobrać nastawy regulatora PI w układzie regulacji poziomu dla danych p% = 20%, tr = 0.5.
Zbiornik z wykładów 2, 3
k = k k = .
2 0
1
2
T = .
0 926 h
k k
i
2
T
ω n
G
=
=
zam
2
2
1 + k k
+ ξω + ω
p
k k
s
2
s
2
i
n
n
s +
s +
T
T
k , k
p
i = ?
p%
ln 100
ξ =
=
4
0 4
. 56 ,
t
ω
r =
.
0 5 =
⇒
n = 1 .
7 54
p
ξω
2
2
% 20%
π + ln
n
100
k k
1 + k k
2
ω = i
k
,
2
p
ξω =
⇒
k = 6 . 9
n
= 17 5
. 42
⇒
i = 142.5
T
n
T
p
k p
.
6 9
T =
=
= .
0 048 h = .
2 9 min = 174 s
i
k
14 .
2 5
i
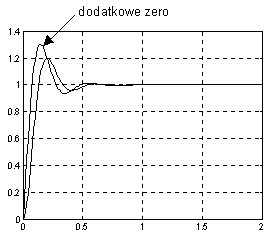
5.3.
Wpływ dodatkowego zera i bieguna
• Wpływ zera
Układ regulacji poziomu ze standardowym regulatorem PI (nierozdzielonym) i
T = .
0 048
1
k
k
1
p
+
ω
n = 1 .
7 54
T s
Ts + 1
i
ξ = 4
.
0 56
1
s +
1
T
PI:
k
1 +
= k
i
p
T s
p
s
i
kk p
s + 1/ T
k
i
T s
k
+1
p
k k s + 1/ T
p
(
i )
( i
)
TT
s
Ts + 1
i
G
=
=
=
zam
s + 1/ T
k
Ts 2 + s + kk s + 1/ T
1 + kk
kk
i
p (
i )
2
p
p
1 + k
+
+
p
s
s
s
Ts + 1
T
TTi
kk
1 + kk
p
2
= ω ,
p = ξ
2 ω
n
n
TT
T
i
2
1 .
7 54 ( 0
.
0 48 s + )
1
G
- dodatkowe zero w liczniku
zam =
2
2
s + 2 ⋅ .
0 456 ⋅17 5
. 4 +1 .
7 54
Matlab
y
omn=17.54
ksi=0.456
l=omn^2
m=[1 2*ksi*omn omn^2]
standard
t=0:0.01:2
y=step(l,m,t)
Ti=0.048
% dodatkowe zero
l=conv(l,[Ti 1])
t
y1=step(l,m,t)
plot(t,y,t,y1), grid
Jak widać przeregulowanie wzrosło (niekorzystne).
Uwaga.
Przez rozdzielenie PI na P+I, a PID na PI+D (ewentualnie I+PD) można uniknąć wprowadzania zer do licznika transmitancji układu zamkniętego, czyli nadmiernych przeregulowań.
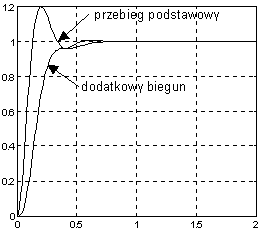
• Wpływ bieguna
2
1
ω n
G
=
zam
2
2
Ts + 1 s + 2ξω s + ω
n
n
Matlab
y
omn=17.54
ksi=0.456
T=0.125
l=omn^2
m=[1 2*ksi*omn omn^2]
t=0:0.01:2
y=step(l,m,t)
% dodatkowy biegun
m=conv(m,[T 1])
y2=step(l,m,t)
plot(t,y,t,y2),grid
t
Uwaga. Pojawienie się dodatkowego bieguna powoduje wydłużenie czasu regulacji tr i zwiększenie czasu narastania t
(niekorzystne). Przeregulowanie znika
n
(korzystne).
5.4. Upraszczanie transmitancji wyższych rzędów Pytanie: Kiedy transmitancję wysokiego rzędu (np. 5-go) można zastąpić transmitancją 2-go rzędu?
• Odrzucanie dalekich biegunów i zer
Odrzucane pierwiastki muszą być przynajmniej 3 do 4 razy większe co do modułu od pozostawianych. Odrzucanie polega na wstawianiu zera zamiast s do odrzuconych czynników w celu zachowania wzmocnienia statycznego.
Przykład. Uprościć transmitancję
10( s + 10)
G( s) = 5
s + 5 4
s + 17 3
s + 43 2
s + 39 s + 27
Matlab
roots([1 5 17 43 39 27])
abs(roots([1 5 17 43 39 27]))
-0.5000 + 2.9580 i
3.0000
-0.5000 - 2.9580 i
3.0000
odrzucane
-3.0000
3.0000
-0.5000 + 0.8660 i
1.0000
-0.5000 - 0.8660 i
1.0000
1 (
0 s + 1 )
0
G( s) = [( s + )5
.
0
2 + .
2 9582 ] ( s + )
3 [( s + .
0 )
5 2 + .
0 8662 ]
Odrzucamy pierwiastki mianownika − 0.5 ± 2.95 i
8 , − 3 oraz – 10 z licznika.
Wstawienie s = 0 do odpowiednich wyrażeń:
1 (
0 0 +
G( s) ≅
1 )
0
=
[ 0
( +
)
5
.
0
2 + 9
.
2 582 ] (0 + )
3 [( s +
)
5
.
0
2 + .
0 8662 ]
100
100 / 27
=
=
32 ⋅ 3 ⋅[( s + .
0 )
5 2 + .
0 8662 ]
2
s + s + 1
y
Matlab
l=10*[1 10]
m=[1 5 17 43 39 27]
t=0:0.2:20
y=step(l,m,t)
l=100/27
m=[1 1 1]
y1=step(l,m,t)
plot(t,y,t,y1),grid
t
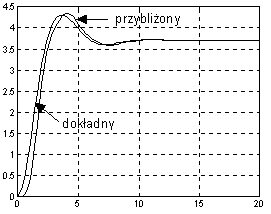
Wniosek. Uproszczenie transmitancji „daje wyczucie” o ξ i ω n, czyli to, z jakim obiektem mamy do czynienia.
• „Redukcja” bardzo bliskich biegunów i zer
Maksymalna różnica pomiędzy redukowanymi pierwiastkami licznika i mianownika nie powinna przekraczać 15÷20%. „Redukcja” polega na wstawieniu s=0 do redukowanych czynników (zachowanie wzmocnienia statycznego).
Przykład. Uprościć transmitancję
297 (
5
. s + 2)
G( s) = 5
s + 15 7
. 5 4
s +137.5 3
s + 415 7
. 5 2
s + 712.5 s + 595
Matlab
roots([1 15.75 137.5 415.75 712.5 595])
abs(roots([1 15.75 137.5 415.75 712.5 595]))
-5.9911 + 7.0044i
9.2171
odrzucane
-5.9911 - 7.0044i
9.2171
-0.9754 + 1.7039i
1.9633
-0.9754 - 1.7039i
1.9633
-1.8171
1.8171
297 (
5
. s + )
2
G( s) = [( s + .59 )92 + 72][( s + 9.
0 7 )
5 2 + 7
.
1 2 ] ( s + .
1 8 )
2
( s + 2 ) jest bliskie ( s + 1 8
. 2 ) - redukcja
Stosujemy obydwa mechanizmy uproszczenia
297 (
5
. 0 +
G( s) ≅
)
2
=
[ 0
( + .
5 9 )
9 2 + 72 ] [( s + 9
.
0 7 )
5 2 + .
1 72 ] (0 + 8
.
1
)
2
29 .
7 5 ⋅ 2
.
3 85
=
=
2
.
9 22
8
.
1
(
2 2
s + .
1 95 s + .
2 7 )
5
( 2
s + 9
.
1 5 s + 8
.
3
)
4
Matlab
y
l=297.5*[1 2]
m=[1 15.75 137.5 415.75 712.5 595]
t=0:0.1:10
y=step(l,m,t)
l=297.5*2
m=9.22^2*1.82*[1 2*0.975 3.84]
y1=step(l,m,t)
plot(t,y,t,y1),grid
t
5.5.
Eliminacja przeregulowania przez filtrację wielkości zadanej
1
k
1
1
PID:
k
1 +
+ T s = k
p
+
+ k T s = k + k + k s
p
T s
d
p
T s
p
d
p
i s
d
i
i
PID o podwójnym zerze równym 1:
( s + )
1 2
s 2 + 2 s + 1
2 s +1 + s 2
1
k
= k
= k
= k
2 + k
+ ks
s
s
s
s
Zatem:
kp = 2 k,
ki = k,
kd = k
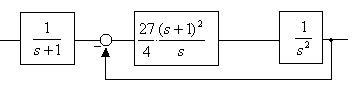
Serwomechanizm z regulatorem PID o podwójnym zerze PID
( s
2
+ )
1
1
k
s
2
s
Pytanie. Dla jakiego k otrzymamy przebiegi aperiodyczne krytyczne?
( s + )2
1
1
k
2
s
k
s
( s + )2
1
Gzam =
( s + )
=
2
3
1
1
s + k( s + )2
1
1 + k
2
s
s
27
Odpowiedź . Przebiegi aperiodyczne krytyczne występują dla k =
(zob. linie pierwiastkowe)
4
3
27
s +
( s + )2 3 27 2 27 27
1
= s +
s +
s +
4
4
2
4
Matlab
roots([1 27/4 27/2 27/4])
27
2
-3.0000
( s + )1
-3.0000
4
Gzam = ( s + )32( s + 7.
0 5)
-0.7500
Sprawdzenie odpowiedzi
1.2
y
1
Matlab
0.8
l=27/4*[1 2 1]
m=[1 27/4 27/2 27/4]
0.6
t=0:0.05:5
0.4
y=step(l,m,t)
plot(t,y),grid
0.2
max(y)
00
1
2
3
4
5
t
y(max)=1.1789,
czyli p%=17.89%
Wniosek. Pomimo, że bieguny są rzeczywiste to przeregulowanie występuje ze względu na dwa zera w liczniku.
•
1
Filtrowanie przez inercję s +1
w
y
27 ( s + )1
Y ( s)
4
=
W ( s)
( s +3)2( s + .07 )5
1.2
Matlab
y
1
y 1
l=27/4*[1 2 1]
0.8
m=[1 27/4 27/2 27/4]
t=0:0.05:5
0.6
y=step(l,m,t)
0.4
l=27/4*[1 1]
y1=step(l,m,t)
0.2
plot(t,y,t,y1),grid
00
1
2
3
4
5
t
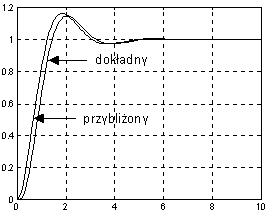
Dodanie filtru wielkości zadanej eliminuje przeregulowanie. Biegun filtru i zero regulatora są przeważnie wybierane jako takie same.
• Doprowadzenie do transmitancji II rzędu przez dobór specjalnego filtru Filtr
3
s +
4
4
(
- jednostkowe wzmocnienie statyczne filtru (koniecznie)
s
)12
+
3
G
(0)
filtr
= 1
w
4 s + .
0 75
7
.
6
(
5 s
2
+ )
1
1
y
2
3 ( s + )
1
2
s
s
27
Y ( s)
9
3
=
=
- wynikowy układ II rzędu
W ( s)
( s + 3)2 ( s + 3)2
Matlab
l=27/4*[1 2 1]
– bez filtru
y
m=[1 27/4 27/2 27/4]
t=0:0.05:5
y=step(l,m,t)
l=27/4*[1 1]
– z filtrem I rzędu
y1=step(l,m,t)
l=9
– ze specjalnym filtrem
m=[1 6 9]
y2=step(l,m,t)
plot(t,y,t,y1,t,y2),grid
t
Wniosek. Przez wstępną filtrację wielkości zadanej można ukształtować przebiegi dynamiczne w układzie.
Uwaga Na ogół dobrze jest, gdy odpowiedź na skok wielkości zadanej nie ma przeregulowania,
a
odpowiedź
na
zakłócenie
ma
lekkie
oscylacje.
Przeregulowanie eliminuje się stosując filtr wielkości zadanej lub podział
regulatora: PI=P+I, PID=PI+D (czasem I+PD).
5.6.
Stabilność układów ze sprzężeniem zwrotnym Definicja. Układ jest stabilny wtedy, gdy wszystkie bieguny układu zamkniętego są ujemne lub mają ujemne części rzeczywiste.
Pytanie. Jak zbadać stabilność nie obliczając pierwiastków?
• Kryterium stabilnoś ci Hurwitza
n 1
b
s −
−
+ ...+ b s + b
n 1
1
0
G
( s) =
,
an > 0
zam
n
n 1
a s + a
s −
−
+ ...+ a s + a
n
n 1
1
0
Lemat. Jeżeli wielomian
n
n 1
a s + a
s −
−
+ ... + a s + a
jest stabilny to jego wszystkie
n
n 1
1
0
współczynniki są dodatnie.
p < ,
0
p < 0 ,
p
gdzie σ < 0
... itd.
3,4 = σ + jω
1
2
2
2
a( s) = ( s − p
s
p
s σ
ω
s
p
s
p
s
σ
ω
1 ) (
− 2 )[( − ) + 2]... = ( + 1 ) ( + 2 )[( + ) + 2]... =
= n
s + ( p + p + 2σ ..
n−
s
+
1
2
). 1 ...
Wynika stąd, że wszystkie współczynniki jako sumy i iloczyny modułów będą dodatnie.
Twierdzenie Hurwitz’a
Dla wielomianu
n
n 1
a s + a
s −
−
+ ... + a s + a należy utworzyć następujący wyznacznik n× n: n
n 1
1
0
a
a
0
0
...
0
0
0
n 1
−
n
a
a
a
a
...
0
0
0
n−3
n−2
n 1
−
n
a
a
a
a
...
0
0
0
n−5
n−4
n−3
n−2
∆ =
n
...
...
...
...
...
...
...
...
0
0
0
0
... a
a
a
0
1
2
0
0
0
0
...
0
0
a 0
Następnie obliczamy podwyznaczniki ∆ , ∆ , ∆ , ..., ∆
. Jeżeli wszystkie podwyznaczniki
2
3
4
n 1
−
są dodatnie to wielomian jest stabilny.
Przykład. 3-ci rząd:
3
2
a s + a s + a s + a
3
2
1
0
Podwyznacznik
a
a
2
3
∆ =
= a a − a a
2
2
1
3
0
a
a
0
1
Układ 3-go rzędu jest stabilny, jeżeli iloczyn wyrazów środkowych jest większy niż iloczyn wyrazów skrajnych: a a > a a .
2
1
3
0
Przykład. Kiedy układ zamknięty o mianowniku 3
2
s + k( s + )
1
będzie stabilny?
s 3 + ks 2 + k
2 s + k
k
∆ =
1 = 2 k 2
2
− k
k
k
2
∆ = 2 2
k − k > 0 ,
k(2 k − )
1 > 0 ⇒ k > ,
0 k > 0 5
.
⇒
k > 0 5
.
2
Przykład. Dla jakich k następujący układ zamknięty będzie stabilny?
w
k
2
y
s
2
( Ts + )
1
k
2
Y ( s)
s T
( s + )
1 2
2 k
2 k
=
=
=
W ( s)
k
2
s T
( s + )
1 2 + k
2
T 2 s 3 + T
2 s 2 + s + 2 k
1 + s T
( s + )
1 2
Bada się stabilność mianownika, czyli
2
1
T
2 ⋅1 > 2 k ⋅ T
⇒
k < T
Uwaga. Kryterium Hurwitza jest wygodnie stosować dla układu 3-go rzędu i ewentualnie 4-go. Natomiast dla układów wyższych rzędów obliczanie wyznaczników staje się żmudne.
• Kryterium stabilnoś ci Routha
Twierdzenie Routha
Liczba pierwiastków wielomianu
n
n 1
a s + a
s −
−
+ ...+ a s + a , które mają dodatnie części n
n 1
1
0
rzeczywiste, jest równa liczbie zmian znaku w lewej skrajnej kolumnie następującej tablicy o n+1 wierszach:
s n
:
a
a
a
... 0
n
n−2
n−4
n 1
s − :
a
a
a
...
n 1
−
n−3
n−5
a
a
a
a
n
n−2
n
n−4
a
a
a
a
n−2
s
:
n 1
−
n−3
n 1
−
n−5
b =
b =
b
1
2
3
− a −
− a
n 1
n 1
−
a
a
a
a
n 1
−
n 3
−
n 1
−
n−5
b
b
b
b
n 3
s − :
1
2
1
3
c =
c =
1
2
− b
− b
1
1
...
...
0
s
:
-
Jeśli w pierwszej kolumnie są same „plusy” to wielomian jest stabilny
-
Jeśli znak w pierwszej kolumnie zmienia się raz, czyli mamy +/-, to jeden pierwiastek powoduje niestabilność
-
Jeśli znak w pierwszej kolumnie zmieni się dwa razy +/-/+ to dwa pierwiastki powodują niestabilność itd.
Twierdzenie Routha daje więcej informacji niż kryterium Hurwitza, ponieważ określa, ile pierwiastków powoduje niestabilność.
Przykład. Zbadać stabilność wielomianu
4
s + 2 3
s + 3 2
s + 4 s + 5
4
s :
1
3
5
0
3
s :
2
4
0
W pierwszej kolumnie występują
2
dwie zmiany znaku +/-/+ co oznacza,
s :
1
5
0
1
że dwa pierwiastki powodują niestabilność.
s :
− 6 0
0
s :
5
Matlab
roots([1 2 3 4 5])
0.2878 + 1.4161 i
- niestabilność
0.2878 - 1.4161 i
- niestabilność
-1.2878 + 0.8579 i
-1.2878 - 0.8579 i
Pytanie. Co zrobić, kiedy w pierwszej kolumnie pojawi się zero?
Przypadek I
Jeśli wiersz poza zerem na początku ma przynajmniej jeden niezerowy składnik, to zero w lewej kolumnie zastępuje się przez małą liczbę ε i kontynuuje budowę tablicy. Na końcu lub na bieżąco analizuje się znaki przy ε → 0 .
Przykład. Zbadać stabilność wielomianu
4
3
s + s + 2 2
s + 2 s +1
4
s :
1
2
1
0
1
3
Granica lim 2 − = −∞ ,
s :
1
2
0
ε →0
ε
2
s :
/,
0 ε
1
0
co oznacza, że występują
1
1
dwie zmiany znaku,
s :
2 −
0
ε
czyli układ jest niestabilny.
0
s :
1
roots([1 1 2 2 1])
0 1
. 217 ±1.306 i
6
- niestabilność
− 0.6217 ±1 4
. 40 i
6
Przypadek II
Jeśli wiersz zawiera same zera, to korzystamy z wyrazów w poprzednim wierszu budując wielomian pomocniczy odpowiedniego stopnia. Następnie różniczkujemy ten wielomian, współczynniki pochodnej wpisujemy zamiast zerowego wiersza i kontynuujemy procedurę.
Wielomian pomocniczy jest podzielnikiem wielomianu głównego, zatem jego pierwiastki są pierwiastkami wielomianu głównego i na ogół można je obliczyć. Wielomian główny nie jest stabilny (niestabilny lub na granicy stabilności).
Przykład. Zbadać stabilność wielomianu
5
s + 2 4
s + 3 3
s + 6 2
s − 4 s − 8
5
s :
1
3
− 4 0
4
s :
2
6
− 8 0
3
s :
0/
0/
0/
a pom = 2 4
s + 6 2
s − 8
8
12
0
da pom
2
s :
3
−8 0
= 8 s 3 +12 s
ds
100
1
s :
0
3
pierwiastki a
2
s =
s = −
pom:
,
1
2
4
0
s :
− 8
stąd
s = 1 ,
s = −1 , s = i
2 ,
s = − i
2
1
2
3
4
Matlab
roots([1 2 3 6 -4 -8])
±2 i
- 2
- 1
- 1
- niestabilny
Wyszukiwarka
Podobne podstrony:
W5 Zawiesia
W5 sII PCR i sekwencjonowanie cz 2
W5 s33 Inżynieria finanansowa
W5 Temperatura powietrza WWSTiZ
W5 Rozpoznawanie 2010
IB w5 co
Architektura i organizacja komuterów W5 Pamięć wewnętrzna
W5 pieniadz i system bankowy
psychologia ogólna W5 2013
w5 wzor reakcja chemiczna ilościowo
Izolacje W5
W5 screening szczepu
w5
2012 KU W5 tryb dzienny moodle tryb zgodnosci
MTZ W5 fazy ppt
P w5 5.11, Studia (Geologia,GZMIW UAM), I rok, Paleontologia ze Stratygrafią, 1. PALEONTOLOGIA WYKŁA
więcej podobnych podstron