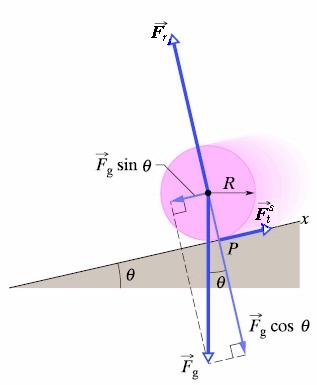
Staczanie bez poślizgu ciała o symetrii osiowej z równi pochyłej siła tarcia (statycznego) ma zwrot w górę równi
– zapobiega poślizgowi
kierunek w dół równi przyjmujemy za dodatni równanie ruchu postępowego:
||
s
F = F − F
w
g
t
s
m a = m g sin θ − Ft (1)
można wykorzystać równanie ruchu obrotowego zarówno w układzie odniesienia związanym ze środkiem masy ( A) jak i w układzie odniesienia związanym z chwilowym punktem styczności z podłożem ( B); w obu przypadkach wypadkowy moment siły pochodzi tylko od jednej z występujących sił:
s
.
A
I ε
0
= τ =
s
RF
F
t
t
B. I
=
=
Pε
τ || Rmg s
F
θ
in
g
zwrot wektora τ r przed płaszczyznę rysunku powoduje obrót przeciwnie do wskazówek zegara, tzn. ruch szpulki w dół równi a
toczenie bez poślizgu – zachodzi zależność a = ε R
→ ε =
R
a
s
.
A
I 0
= RFt
(2 A)
R
a
B. (
2
I + mR )
= R m g s
0
θ
in
(2 B)
R
A. ruch obrotowy wokół osi przechodzącej przez środek masy z (1) obliczamy F st i podstawiamy do (2 A): F s = m g sin θ − m a t
(3 A)
a
I
= R( mg sin θ − ma) 0
/ ⋅ R
R
I a = mR 2 g sin θ − m R 2 a 0
porządkujemy ostatnie równanie ze względu na a a (
2
I + m R )
2
= mR g sin
0
θ
2
mR
a =
g s θ
in
2
I + m R
(4 A)
0
obliczenie F st – podstawiamy (4 A) do (3 A) 2
mR
F s = mg sin θ − m a = mg sin θ − m g sin θ =
t
2
I + m R
0
2
2
I mg sin θ + m R mg sin θ − m R mg sin θ
0
=
2
I + m R
0
I 0
F s =
mg sin
t
θ
2
I + m R
(5 A)
0
B. ruch obrotowy wokół osi przechodzącej przez chwilowy punkt styczności z podłożem z (2 B) obliczamy a i podstawiamy do (1): 2
m R
a =
g sin θ
2
I + mR
(4 B)
0
m R 2
s
sin θ =
sin θ −
m
g
m g
Ft
I + mR 2
0
2
2
2
m R
I + mR − m R
F s = m g sin −
=
t
θ m
g sin θ
0
m g sin θ
2
2
I + mR
I + mR
0
0
I 0
F s =
mg s
t
θ
in
2
I + m R
(5 B)
0
równania (4 A) i (4 B) oraz (5 A) i (5 B) są identyczne – rozważenie ruchu obrotowego w dwóch układach odniesienia: związanym ze środkiem masy i związanym z chwilowym punktem styczności z podłożem daje takie same wyniki jeżeli ciało jest jednorodne lub puste w środku – I 0 = β mR 2
2
m R
a =
g sin θ
β
2
2
mR + mR
1
a =
g
θ
β
sin
+1
(4)
β
2
mR
F s =
m g s
t
θ
in
β
2
2
mR + m R
β
F s =
m g sin
t
θ
β +1
(5)
Wyszukiwarka
Podobne podstrony:
Materiałoznawstwo i Techniki Wytwarzania Sprawozdanie 5A
5Analiza-5A, Materiały z Uniwersytetu Szczecińskiego i PS (ZUT)
Sprawozdanie 5A - Stale Konstrukcyjne Niestopowe, sem II, Materiałoznawstwo i Techniki Wytwarzania -
Materiałoznawstwo i Techniki Wytwarzania Sprawozdanie 5A
Wytrzymalosc Materialow Zbigniew Brzoska Rozdzial 5A Zginanie proste cz 1
geriatria p pokarmowy wyklad materialy
Materialy pomocnicze prezentacja maturalna
Wyklad 5a Dyfuzja
Problemy geriatryczne materiały
Wstęp do psychopatologii zaburzenia osobowosci materiały
material 7
PodMar 5a (istota produktow)
Prez etyka materiały1
Prez etyka materialy7
5a Finanse publiczne
Med Czyn Rat1 Ostre zatrucia Materialy
więcej podobnych podstron