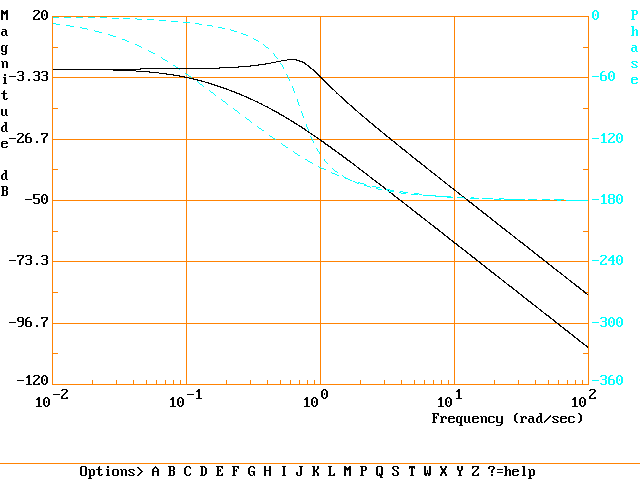
W tym przypadku obiekt inercyjny 2 rzędu, regulator PI wprowadza przeregulowanie które wpływa na stabilność układu. Naszym zdaniem należy zastosować regulator typu PID , który łączy w sobie cechy regulatorów PI i PD.
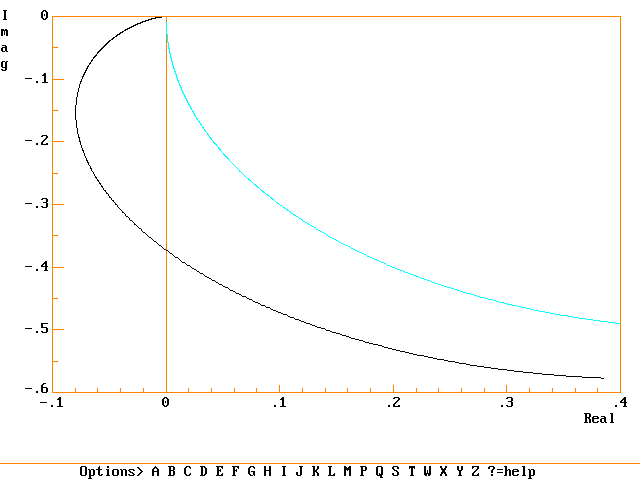
Charakterystyka Nyquista uwidacznia , iż obiekt zachowuje się jak obiekt inercyjny 1-rzędu , ponieważ nie przecina osi rzędnych. Natomist w połączeniu z regulatorem obiekt zachowuje się jak obiekt 2-rzędu.
Wyszukiwarka
Podobne podstrony:
Dziwka
dziwka1
Gabriel Garcia Marquez Rzecz o mych smutnych dziwkach
Marquez Gabriel Garcia Rzecz o mych smutnych dziwkach
G G Marquez Rzecz o mych smutnych dziwkach(1)
Marquez Gabriel Garcia Rzecz o mych smutnych dziwkach 2
Joanna Kulmowa Dziwka
MARQUEZ Gabriel Garcia Rzecz o mych smutnych dziwkach
Gabriel Garcia Marquez Rzecz o mych smutnych dziwkach
AA Ślizgońska dziwka 1 8
Marquez Gabriel Garcia Rzecz o mych smutnych dziwkach
Ślizgońska dziwka
Gabriel Garcia Marquez Rzecz o mych smutnych dziwkach
Gabriel García Márquez Rzecz o mych smutnych dziwkach
Collins Jackie Dziwka
Kiedy kobieta zostaje dziwką
Marquez G G Rzecz o mych smutnych dziwkach
więcej podobnych podstron