POLITECHNIKA ŚLĄSKA W GLIWICACH
WYDZIAŁ ELEKTRYCZNY
LABORATORIUM ROBOTYKI
Temat ćwiczenia:
Przekształcenia jednorodne w robotyce
Wykonali: Pióro Klaudia
Kupski Michał
Siedlarek Damian
Domalik Patryk
Zieliński Marcin
Grupa: KSS 1
Sekcja: 5
Cel ćwiczenia
Celem ćwiczenia było zapoznanie się z zagadnieniem ruchu sztywnego ( jest to związek pomiędzy układem O x0 y0 z0 i układem O x1 y1 z1 wyrażony jako kombinacja obrotu i przesunięcia).
Przebieg ćwiczenia
W pierwszej części naszego ćwiczenia musieliśmy wyznaczyć macierze, które w pełni zdefiniuje nam położenie i orientację wektora w przestrzeni trójwymiarowej. Aby lepiej zapoznać się z tym tematem rozważmy następującą reprezentację macierzową:
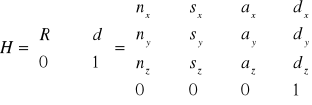
W przedstawionym powyżej równaniu, n=(nx ny nz)T jest wektorem reprezentującym kierunek osi O1x1 w układzie O x0 y0 z0, s=(sx sy sz)T reprezentuje kierunek osi O1y1, natomiast a=(ax ay az)T reprezentuje kierunek osi O1z1. Wektor d=(dx dy dz)T jest reprezentacją wektora od początku O0 do początku O1 wyrażony w układzie O x0 y0 z0. W macierzy H występują również takie wielkości jak skala i perspektywa, które w naszym ćwiczeniu zostały pominięte. Powyższą macierz) nazwano przekształceniem jednorodnym
W naszym ćwiczeniu zdefiniowaliśmy następujące przekształcenia jednorodne:
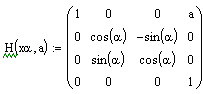
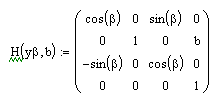
a) W dalszej części naszego ćwiczenia dokonujemy obrotu i przesunięcia (lub przesunięcia i obrotu) układu 01x1y1z1 względem układu 00x0y0z0 zgodnie z przekształceniem Hy. W kolejnej fazie przy pokrywających się układach 01x1y1z1 i 02x2y2z2 dokonujemy obrotu i przesunięcia układu 02x2y2z2 względem 01x1y1z zgodnie z przekształceniem Hx .W każdym przypadku układ, względem, którego odbywa się obrót, nazywa się układem bieżącym.
Macierz H1,0a opisuje obrót i przesunięcie (lub przesunięcie i obrót) między układami współrzędnych 00x0y0z0 i 01x1y1z1, natomiast macierz H2,1a opisuje obrót i przesunięcie (lub przesunięcie i obrót) między układami 01x1y1z1 i 02x2y2z2.
Powyższe równanie jest prawem składania przekształceń jednorodnych.
Obliczone współrzędne wektorów z powyższych równań.
W celu sprawdzenia otrzymanych wyników musimy zastosować następujące obliczenia:
W obu przypadkach dokonujemy obrotu i przesunięcia wektora.
Jednakowa wartość owych wektorów potwierdza poprawność naszych wyliczeń.
b) Kolejna część naszego ćwiczenia laboratoryjnego była podobna do poprzedniego ćwiczenia z tylko tym wyjątkiem, że dochodzi nam dodatkowy obrót i przesunięcie (lub przesunięcia i obrotu) układu 03x3y3z3 względem 02x2y2z2 zgodnie z przekształceniem Hz.
c) W ostatniej części naszego ćwiczenia robimy to samo co w podpunktach a) oraz b) z tą różnicą że dokonujemy obrotu wokół ustalonego układu, a nie bieżącego.
Wnioski
Przeprowadzone przez nas obliczenia pozwoliły nam zapoznać się z aparatem matematycznym, jaki jest wykorzystywany w robotyce, oraz poznać podstawowe funkcje oprogramowania, inżynieryjskiego jakim jest MATHCAD.
Na podstawie przeprowadzonych obliczeń, oraz wiedzy teoretycznej, wiemy, że
tego rodzaju przekształcenia stosowane są w robotyce do obliczania zadań prostych i odwrotnych manipulatorów robotów.
Zadanie proste polega na obliczeniu na podstawie zmiennych kinematycznych (czyli obrotów i wysuwów odpowiednich członów robota) położenia końcówki manipulatora (lub innego jego punktu) w globalnym (zewnętrznym) układzie współrzędnych.
Zadanie odwrotne jest trudniejsze i obejmuje wyliczenie ustawień kątów i wysuwów na podstawie zadanego położenia końcówki.
Wyszukiwarka
Podobne podstrony:
Sprawozdzanko12, Sprawka, mechatronika
sprawozdanie 3, I semsestr, Mechatronika, Nowy folder
Sprawozdanie 2, Sprawka z fizyki
boebot, Sprawka, mechatronika
Iloczyn rozpuszczalności soli trodno rozpuszczalnych, studia, chemia, chemia fizyczna, sprawozdania,
HCOOH, studia, chemia, chemia fizyczna, sprawozdania, sprawka
Diagram fazowy Gibbsa, studia, chemia, chemia fizyczna, sprawozdania, sprawka
Entropia mieszania, studia, chemia, chemia fizyczna, sprawozdania, sprawka
Sprawozdanie z praktyk(1), Mechatronika AGH IMIR, semestr 7
Pączek matcad 12, Sprawka, mechatronika
Badanie lepkości cieczy metodą Hopplera, studia, chemia, chemia fizyczna, sprawozdania, sprawka
Recykling odpadów sztucznych. sprawko, Mechatronika, Recykling
Tmm sprawko 1, Mechatronika AGH IMIR, rok 2, TMM
Pączek matcad 13, Sprawka, mechatronika
izoterma adsorbcji, studia, chemia, chemia fizyczna, sprawozdania, sprawka
Stała szybkości reakcji jodowania acetonu, studia, chemia, chemia fizyczna, sprawozdania, sprawka
I AD, Studia, Semestr 1, Fizyka, Sprawozdania, Sprawka, ćwiczenie 22 przyjęte
fiz lab cw36 sprawozdanie tomka, Mechatronika, 2 Rok
więcej podobnych podstron