Pomiar czasu i częstotliwości.
CEL ĆWICZENIA
Celem ćwiczenia jest poznanie metod pomiaru czasu i częstotliwości oraz zapoznanie się z możliwościami zastosowania niektórych typów częstotliwościomierzy i czasomierzy do pomiaru wyżej wymienionych wielkości. Czas i częstotliwość to jedne z najczęściej mierzonych wielkości zarówno w badaniach naukowych i technice jak i w życiu codziennym. Ze względu na ziarnistą strukturę tych wielkości są one często wykorzystywane w technice cyfrowej jako wielkości pośrednie przy pomiarach wielkości ciągłych. Dlatego też dokładność pomiaru czasu i częstotliwości ma duże znaczenie w metrologii.
UŻYTE PRZYRZĄDY
- częstościomierz rezonansowy wibracyjny (języczkowy) I E1-PN-7/1-933
- częstościomierz-czasomierz cyfrowy typ PFL-20 I 12-7/1-4962
- TRANSFORMER Type TO-1
- Generator FUNCTION GENERATOR type KZ 1404 0,05 Hz ÷ 1 MHz
WYNIKI POMIARÓW
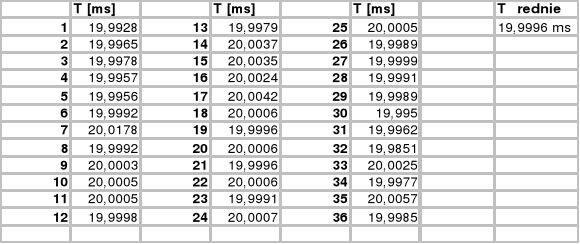
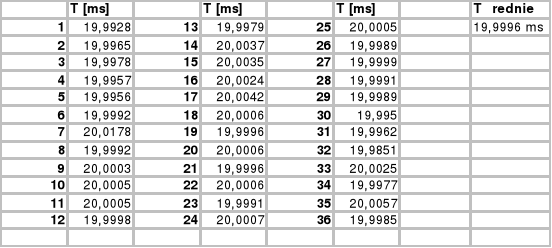
Pomiar częstotliwości sieci zasilającej.
fw=50 Hz
wartość współczynnika tn-1,α= 2,0317
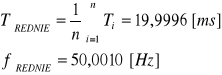
wartość średnia okresu sieci wynosi:
odchylenie średniokwadratowe wynosi:
margines wahań okresu i częstotliwości wynosi:
ΔPT = tn-1,α⋅(σT/√n) = 0,0179 [ms]
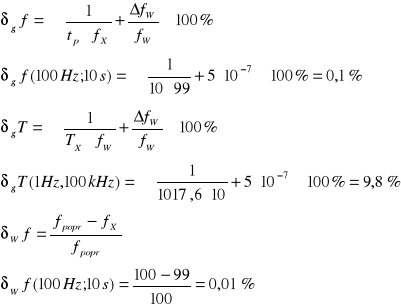
ΔPf = tn-1,α⋅(σf/√n) = 0,2025 [Hz]
Wyznaczenie charakterystyki błędu częstościomierza.
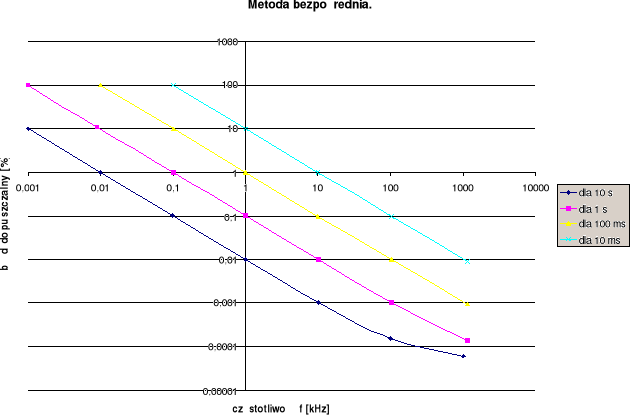
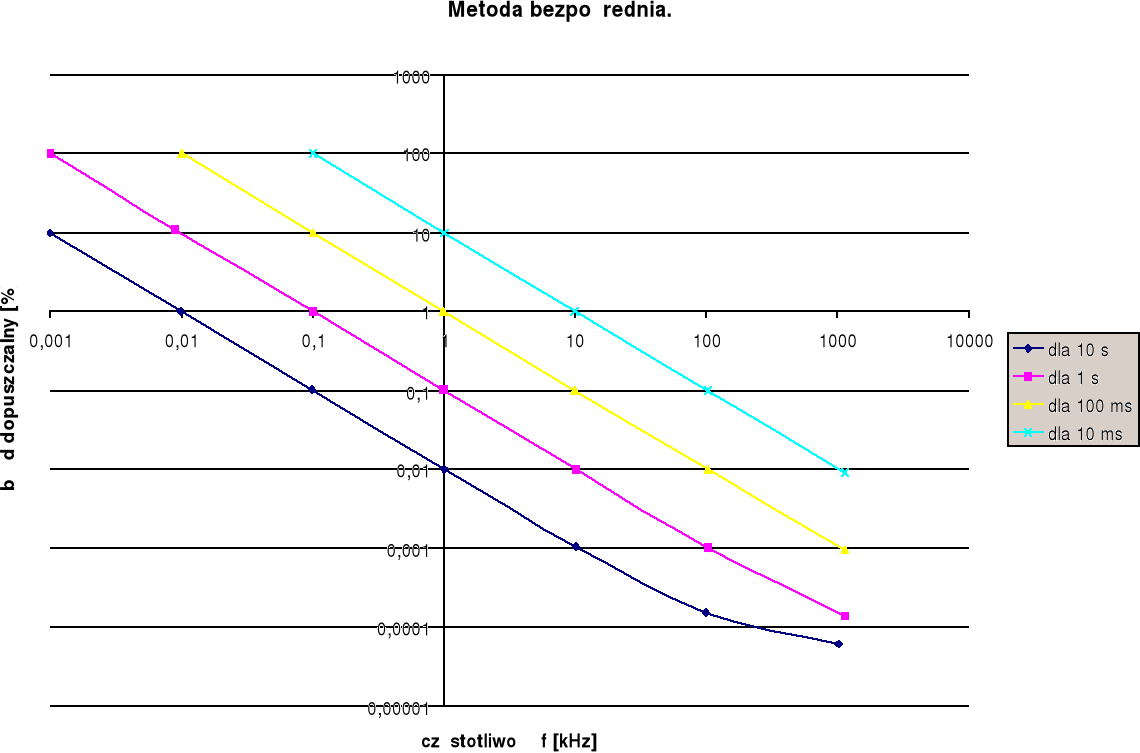
Metoda bezpośrednia.
Czas otw. bramki |
Nastawa generatora |
1 Hz |
10 Hz |
100 Hz |
1 kHz |
10 kHz |
100 kHz |
1 MHz |
|
Wskazanie miernika ƒ[kHz] |
0,001 |
0,0099 |
0,099 |
1,0058 |
10,0899 |
98,5587 |
1020,2 |
10 s |
Błąd dopuszczaln δgf [%] |
10,00005 |
1,01015 |
0,10106 |
0,00999 |
0,00104 |
0,00015 |
0,00006 |
|
Błąd wskazania δWf [%] |
0 |
0,01 |
0,01 |
-0,0058 |
-0,00899 |
0,01441 |
-0,0202 |
|
Wskazanie miernika ƒ[kHz] |
0,001 |
0,009 |
0,101 |
0,988 |
10,069 |
103,013 |
1129,3 |
1s |
Błąd dopuszczaln δgf [%] |
100,0001 |
11,11116 |
0,99015 |
0,10127 |
0,00998 |
0,00102 |
0,00014 |
|
Błąd wskazania δWf [%] |
0 |
0,1 |
-0,01 |
0,012 |
-0,0069 |
-0,03013 |
-0,1293 |
|
Wskazanie miernika ƒ[kHz] |
- |
0,01 |
0,1 |
0,99 |
10,01 |
102,39 |
1130,1 |
100 ms |
Błąd dopuszczaln δgf [%] |
- |
100,0001 |
10,00005 |
1,01015 |
0,09995 |
0,00982 |
0,00093 |
|
Błąd wskazania δWf [%] |
- |
0 |
0 |
0,01 |
-0,001 |
-0,0239 |
-0,1301 |
|
Wskazanie miernika ƒ[kHz] |
- |
- |
0,1 |
1,0 |
10 |
102,5 |
1130,6 |
10 ms |
Błąd dopuszczaln δgf [%] |
- |
- |
100,0001 |
10,00005 |
1,00005 |
0,09761 |
0,00889 |
|
Błąd wskazania δWf [%] |
- |
- |
0 |
0 |
0 |
-0,025 |
-0,1306 |
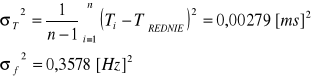
Przykładowe obliczenia:
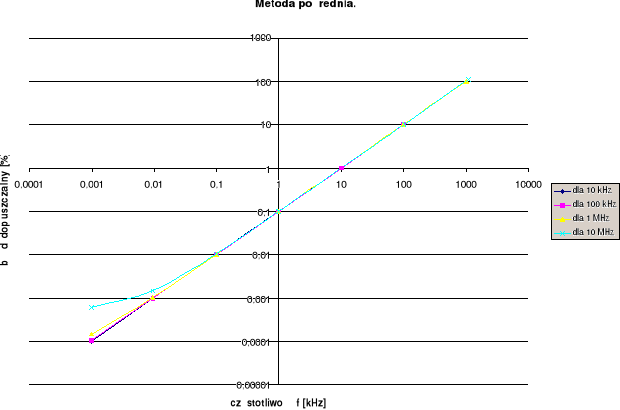
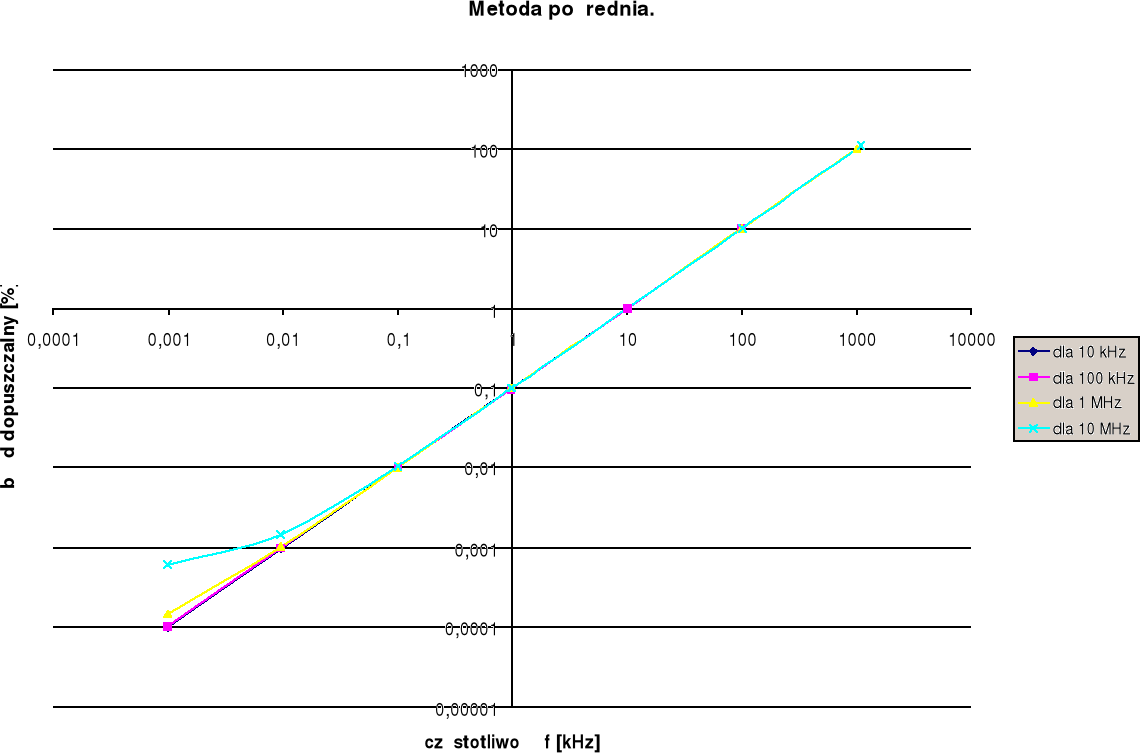
Metoda pośrednia.
Częst. Wzorcow. |
Nastawa generatora |
1 Hz |
10 Hz |
100 Hz |
1 kHz |
10 kHz |
100 kHz |
1 MHz |
|
Wskazanie miernika T[ms] |
1017,6 |
103,4 |
9,9 |
1,0 |
0,1 |
- |
- |
|
Przeliczanie ƒ[kHz] |
0,00098 |
0,00967 |
0,10101 |
1 |
10 |
|
|
10kHz |
Błąd dopuszczalny δgf [%] |
0,00010 |
0,00097 |
0,01010 |
0,10001 |
1 |
|
|
|
Błąd wskazania δWf [%] |
0,0173 |
0,03288 |
-0,0101 |
0 |
0 |
|
|
|
Wskazanie miernika T[ms] |
1017,6 |
103,32 |
9,93 |
1,02 |
0,1 |
0,01 |
- |
|
Przeliczanie ƒ[kHz] |
0,00098 |
0,00968 |
0,10071 |
0,98039 |
10 |
100 |
|
100kHz |
Błąd dopuszczalny δgf [%]' |
0,00010 |
0,00097 |
0,01008 |
0,09804 |
1,00001 |
10,00001 |
|
|
Błąd wskazania δWf [%] |
0,0173 |
0,03213 |
-0,00705 |
0,01961 |
0 |
0 |
|
|
Wskazanie miernika T[ms] |
1018,8 |
103,47 |
9,93 |
1,013 |
0,99 |
0,01 |
0,001 |
|
Przeliczanie ƒ[kHz] |
0,00098 |
0,00967 |
0,10071 |
0,98717 |
1,0101 |
100 |
1000 |
1MHz |
Błąd dopuszczalny δgf [%]' |
0,00015 |
0,00102 |
0,01012 |
0,09877 |
0,10106 |
10,00005 |
100,0001 |
|
Błąd wskazania δWf [%] |
0,01845 |
0,03354 |
-0,00705 |
0,01283 |
0,89899 |
0 |
0 |
|
Wskazanie miernika T[ms] |
1018,9 |
103,44 |
9,925 |
1,0115 |
0,993 |
0,0097 |
0,0009 |
|
Przeliczanie ƒ[kHz] |
0,00098 |
0,00967 |
0,10076 |
0,98863 |
1,00705 |
103,0928 |
1111,111 |
10 MHz |
Błąd dopuszczalny δgf [%]' |
0,0006 |
0,00147 |
0,01058 |
0,09936 |
0,1012 |
10,30978 |
111,1116 |
|
Błąd wskazania δWf [%] |
0,01855 |
0,03326 |
-0,00756 |
0,01137 |
0,8993 |
-0,03093 |
-0,11111 |
Wykresy przedstawiono w skali logarytmicznej.
Wyszukiwarka
Podobne podstrony:
(110) AMartens KSnr2id 811
811
811
gornik eksploatacji otworowej 811[01] z2 02 u
gornik eksploatacji otworowej 811[01] z2 01 u
gornik eksploatacji otworowej 811[01] z4 03 n
gornik eksploatacji otworowej 811[01] z4 03 u
811
gornik eksploatacji otworowej 811[01] z3 01 n
gornik eksploatacji otworowej 811[01] z2 03 n
811
gornik eksploatacji otworowej 811[01] z3 01 u
811
gornik eksploatacji otworowej 811[01] z2 03 u
gornik eksploatacji otworowej 811[01] z4 01 n
gornik eksploatacji otworowej 811[01] z3 02 u
gornik eksploatacji otworowej 811[01] z3 02 n
gornik eksploatacji otworowej 811[01] z4 02 n
więcej podobnych podstron