Obliczenia wałków przekładni walcowej
Wyznaczenie odległości między łożyskami i kołami zębatymi (wg rys.1)
Wałek nr1 i nr2
Odległość „a” między łożyskiem a środkiem koła walcowego z2 (lub z1) w funkcji
średnicy drugiego wałka
d2 - przybliżona średnica wałka nr 2 z warunku na skręcanie
Szerokość łożyska „lb”
lb=0.6*d2
Szerokość piasty „lp” koła z2
lp=1.0*d2
Luz między kołem a łożyskiem lz =0.2*dw2
Odległość „a” między lewym łożyskiem a środkiem koła z2
a=0.5*lb+0.5*lp +lz =0.3*d2+0.5*d2 +lz=1.0*d2
Odległość między środkiem koła zębatego a prawym łożyskiem też ma wynosić „a” (ze
względu na założoną symetrię położenia kół w korpusie).
Siły międzyzębne
Zwroty sił międzyzębnych będą zgodne ze zwrotami jak na rysunku nr 1,2 i 3 jeśli
iloczyn znaków pochylenia linii śrubowych zęba βm i znaków obrotów n będzie dodatni,
czyli sign (βm)*sign(n)>0 .
Wzory na składowe sił międzyzębnych
Siła obwodowa
![]()
,
![]()
, (znak zależny od iloczynu sign (βm)*sign(n))
gdzie dm1 =dt1 jest średnicą podziałową koła z1 w przekroju czołowym.
Górne znaki w powyższych wzorach obowiązują, jeśli dodatni jest iloczyn znaków obrotów i kąta pochylenia linii zęba.
Dla koła z2 zachodzą następujące zależności
![]()
, ![]()
, ![]()
.
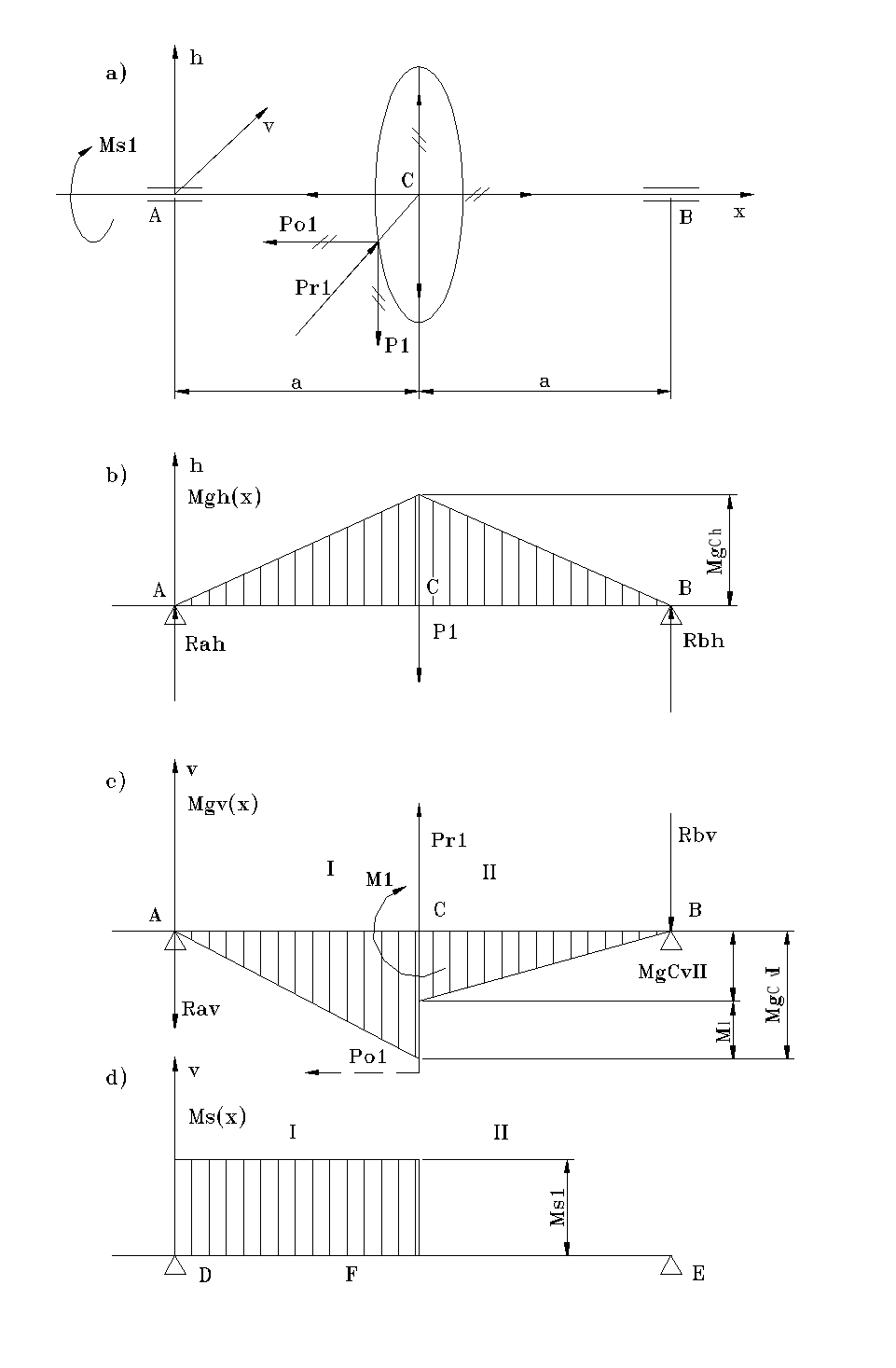
Obliczenia wałka nr 1
Układ sił i wykresy momentów przedstawiono na rys.2.
W płaszczyźnie h-x:
a. Obliczenia reakcji składowych na podporach RBh i RAh
Suma momentów względem punktu A
Σ MiA= RBh*2*a-P1*a= 0 , stąd obliczamy
składowe poziome „h” reakcji RBh i RAh w punktach B i A
RBh =P1/2 ,
RAh=P1-RBh =P1/2.
b. Obliczenie momentów gnących w punktach A, B i C
Moment gnący w płaszczyźnie h-x w punktach A i B
MgAh=0 , MgBh=0 .
Moment gnący w punkcie C wynosi:
MgCh=RAh*a.
W płaszczyźnie v-x:
Moment skupiony M1 w punkcie C od siły osiowej Po1
M1=Po1*dm1/2
c. Obliczenia reakcji składowych na podporach RBv i RAv
Suma momentów względem punktu A
Σ MiA= -RBv*2*a-M1+Pr1*a= 0 , stąd
wyznaczamy składową pionową „v” reakcji RBv w punkcie B
RBv=(Pr1*a-M1)/(2*a)
Suma sił względem osi v
Σ Piv= -RAv-RBv+Pr1= 0, stąd
RAv = Pr1-RBv
d. Obliczenie momentów gnących w punktach A, B i C
Moment gnący w płaszczyźnie v-x w punkcie C od lewej strony (I przedział)
MgCvI= -RAv*a ,
w punkcie C od prawej strony (II przedział)
MgCvII= -RBv*a , a w punktach A i B
MgAv=0, MgBv=0.
d. Całkowite reakcje promieniowe (wypadkowe) na podporach
![]()
, ![]()
e. Całkowite momenty gnące (wypadkowe) w punktach A, B, C
![]()
![]()
dla k={A,B,C}, przy czym
![]()
![]()
, ![]()
,
![]()
MgA= 0, MgB= 0.
f. Obliczenie momentów zastępczych w punktach A, B, C
![]()
,
gdzie: 
, Ms1= P1*dm1/2 .
Na granicach przedziałów momenty zredukowane wynoszą
![]()
, MzB=0 .
![]()
, ![]()
W przypadku koła nacinanego przyjmujemy taki sam materiał wałka jak dla koła zębatego z1 . W przeciwnym przypadku materiał wałka dobieramy z tablicy 16 skryptu do reduktora.
g. Średnicę wałka w dowolnym punkcie liczymy stosując hipotezę wytężeniową Hubera
Dzielimy część wałka o długości „a” zaleca się podzielić na 3 lub 4 przedziały. W otrzymanych punktach obliczamy teoretyczną średnicę (lub promień wałka). Zarys wałka rzeczywistego powinien być ukształtowany na zewnątrz wałka teoretycznego, uwzględniając znormalizowane wartości średnic czopów pod łożyska toczne, uszczelnienia i wpusty.
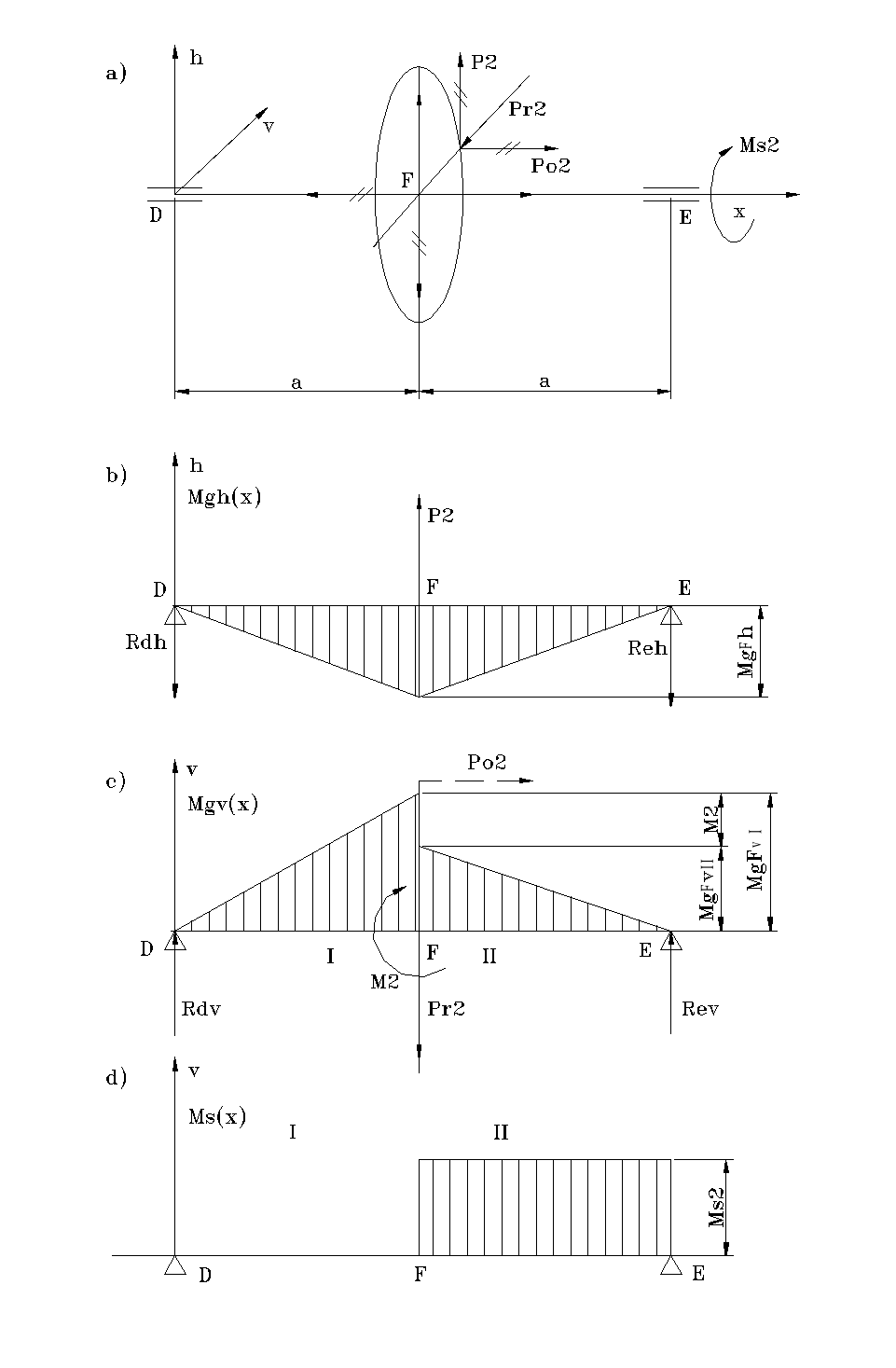
Obliczenia wałka nr 2
Układ sił i wykresy momentów przedstawiono na rys.3.
W płaszczyźnie h-x:
a. Obliczenia reakcji składowych na podporach RDh i REh
Suma momentów względem punktu D
Σ MiD= P2*a-REh*(2*a)= 0 , stąd obliczamy
składowe poziome „h” reakcji w punktach D i E
REh =P2/2 ,
RDh=P2-REh = P2/2 .
b. Obliczenie momentów gnących w punktach D, E i F
Moment gnący w płaszczyźnie h-x w punkcie F
MgFh=-REh*a .
Moment gnący w punktach D i E wynosi:
MgDh=0, MgEh=0.
W płaszczyźnie v-x:
Moment skupiony M2 w punkcie F od siły osiowej Po2
M2=Po2*dm2/2 ,
gdzie dm2=dt2 .
c. Obliczenia reakcji składowych na podporach RBv i RAv
Suma momentów względem punktu D
Σ MiD= -Pr2*a-M2+REv*(2*a)= 0 , stąd
wyznaczamy składową pionową „v” reakcji REv w punkcie E
REv=(Pr2*a+M2)/(2*a)
Suma sił względem osi v
Σ Piv= -Pr2+REv+RDv = 0, stąd
RDv = Pr2-REv
d. Obliczenie momentów gnących w punktach D, E i F
Moment gnący w płaszczyźnie v-x w punkcie F w „I” przedziale
(granica lewostronna)
MgFvI= RDv*a,
a w przedziale II (granica prawostronna) moment gnący
MgFvII= REv*a, a w punktach D i E
MgDv=0, MgEv=0 .
d. Całkowite reakcje promieniowe (wypadkowe) na podporach
![]()
, ![]()
e. Całkowite momenty gnące (wypadkowe) w punktach D, E, F
![]()
![]()
dla k={D,E,F}, przy czym
![]()
![]()
, ![]()
![]()
MgD=0, MgE=0 .
f. Obliczenie momentów zastępczych w punktach D, E, F
![]()
,
gdzie: 
, Ms2= P2*dm2/2 .
Na granicach przedziałów momenty zredukowane wynoszą:
MzD=0, MzE=α*Ms2,
MzFI= MgFI, ![]()
Materiał wałka dobieramy z tablicy 16 skryptu do reduktora.
g. Średnicę wałka w dowolnym punkcie liczymy stosując hipotezę wytężeniową Hubera
Dzielimy część wałka o długości „a” zaleca się podzielić na 3 (lub 4) przedziały. W otrzymanych punktach obliczamy teoretyczną średnicę (lub promień wałka). Zarys wałka rzeczywistego powinien być ukształtowany na zewnątrz wałka teoretycznego, uwzględniając znormalizowane wartości średnic czopów pod łożyska toczne, uszczelnienia i wpusty.
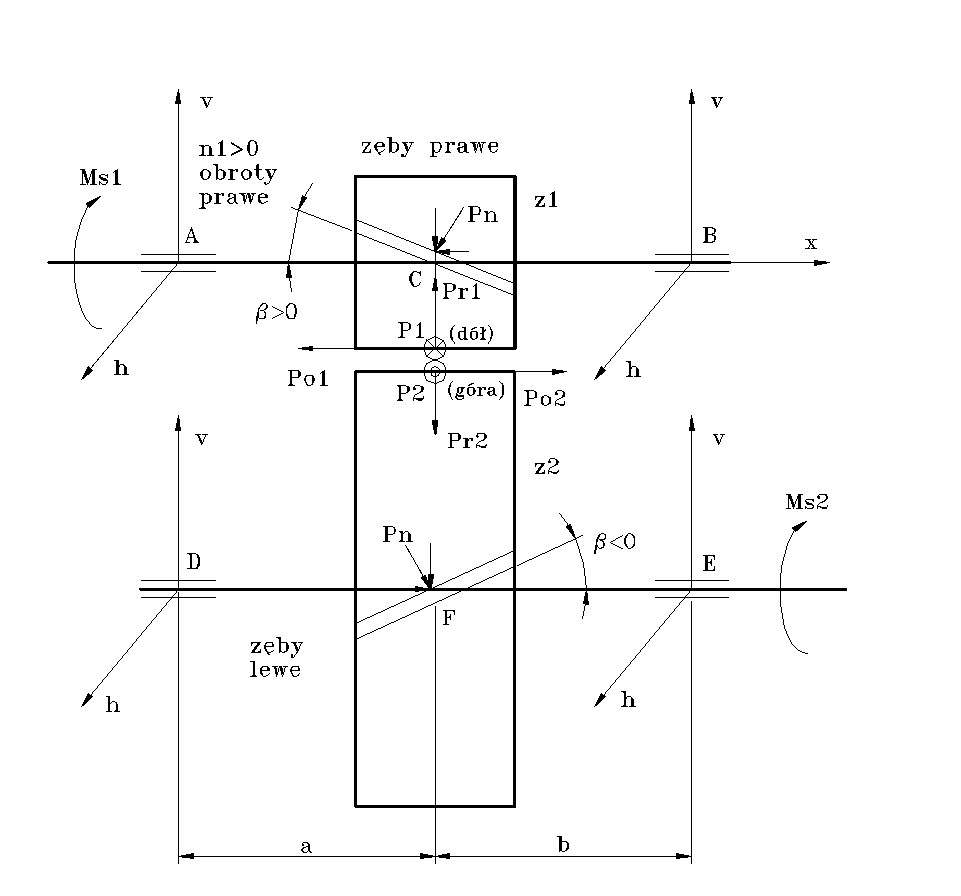
Rys.1
Rys.2
Rys.3
3
Wyszukiwarka
Podobne podstrony:
Oblicz-wałka pośredniego, Automatyka i Robotyka studia, 2rok, projekt pmr pkm, Nowy Archiwum WinRARa
materiały na wały, Automatyka i Robotyka studia, 2rok, projekt pmr pkm, Nowy Archiwum WinRARa (ZIP),
tematy do egzaminu tmm, Automatyka i Robotyka studia, 2rok, Teoria mech i masz, Ćwiczenia + egzamin,
Projekt 2 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Projekt 1 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
sprawko robotyka, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
obliczenia do robota, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatoró
Projekt3, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt góra, R
projekt1hubert, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt g
projekt 1 hubert, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Sprawozdanie z laboratorium automatyki i robotyki, Studia, PWR, 2 semestr, Podstawy automatyki i rob
Sprawozdanie L1 (1), Automatyka i Robotyka studia, 3 rok, STEROWANIE PROCESAMI CIĄGŁYMI
sprawozdanie automatyka2, studia, V semestr, Automatyka i robotyka, sprawko automaty stabilność
Projekt manipulatora, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, A PROJEKT MANIPULA
projekt dla rudego, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Projekt
więcej podobnych podstron