020 021
20 Piotr Sajpel Krzysztof Stroiński
Współczynniki Ax.....Am wyznaczamy ze wzoru (1.29) lub (1.31),
natomiast współczynniki B\.....Bp obliczamy ze wzorów:
Br
L(s)(s-sny
M(s)
Vi =
ds
1 d'
B. ds‘
L(s)(s~s„ f M(s)
L(s)(s ~ sn)ł M{s)
(1.33)
Podany sposób rozkładu na ułamki proste można poszerzyć na przypadki, w których występuje kilka wielokrotnych miejsc zerowych.
1.5. Wyznaczanie transmitancji podstawowych połączeń elementów [2]
Przy analizie budowy poszczególnych układów automatyki spotykamy się z zróżnicowanymi połączeniami między elementami tworzącymi te układy. Jednakże wszystkie dają się sprowadzić do trzech podstawowych rodzajów.
1.5.1. Połączenie szeregowe elementów o jednym wejściu i wyjściu (rys. 1.4)
Na podstawie definicji transmitancji. którą podaliśmy wcześniej, możemy napisać:
y(s) = b(s) a(s) x(s) b(s) a(s) x(s)
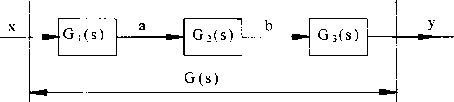
Rys. 1.4. Szeregowe połączenie elementów
Uzyskany wynik możemy uogólnić na n elementów. Ogólnie, transmitancja szeregowego połączenia elementów jest równa iloczynowi transmitancji ty ch elementów.
1.5.2. Połączenie równolegle elementów o jednym wejściu i wyjściu (rys. 1.5)
Zastępcza transmitancja takiego układu przyjmie postać:
y(s) ^ a(s) + b(s)-c(s) = a{s) | b(s) c(s)
;t(s) *(s) ;c(s) x(s) x(s)
G(s) = Gl(s) + G2(s)~Gi(s) (1.35)
Ogólnie, transmitancja równoległego połączenia elementów jest równa algebraicznej sumie (z uwzględnieniem znaków) transmitancji tych elementów.
Jeżeli w dowolnej gałęzi schematu blokowego nie występuje żaden blok
0 określonej transmitancji, to transmitancja takiej gałęzi równa się 1 (wejście
1 wyjście tej gałęzi jest takie same).

Rys 1.5. Równoległe połączenie elementów
Wyszukiwarka
Podobne podstrony:
020 021 20 Piotr Sajpel Krzysztof Stroiński Współczynniki At.....An) wyznaczamy ze wzoru (1.29) lub
022 023 22 Piotr Sajpel Krzysztof Stroiński1.5.3. Połączenie ze sprzężeniem zwrotnym elementów o jed
026 027 26 Piotr Sajpel. Krzysztof Stroiński Zadanie 4 Znaleźć oryginał mając transformatę: i- + 2s
022 023 22 Piotr Sajpel. Krzysztof Stroiński1.5.3. Połączenie ze sprzężeniem zwrotnym elementów o je
024 025 24 Piotr Sajpel, Krzysztof Stroiński = —-(o-i)—!— s + a s + a całka jest o
026 027 26 Piotr Sajpel. Krzysztof Stroiński Zadanie 4 Znaleźć oryginał mając transformatę: .v(a-) =
020 021 2 20 Programowanie liniowe Zadania programowania liniowego o małych rozmiarach (w których wy
020 021 20 Przykład 1.13 O Liczbę (10001101 )(jray przedstawić w naturalnym kodzie
024 025 24 Piotr Sajpei, Krzysztof Stroiński= __ł_(o_ !) = _!_ s+a s+a całka jest
020 021 20 Przykład 1.13 liczbę (10001101 )(jray przedstawić w naturalnym kodzie dwójkowym. Na podst
Skrypt PKM 1 00036 72 Teoretyczną wartość współczynnika naprężeń można wyliczyć ze wzoru (2*9) gdzie
Wyznaczenie współczynnika SAR wymaga wyznaczenia energii wydzielanej w obiekcie lub wyznaczenia natę
DSC00260 (20) Logarytmując wyrażenie (30.12) i podstawiając za I światłość względną W ze wzoru (30.8
Strona0166 166 Optymalną wartość współczynnika tarcia wiskotycznego wyznaczono wg wzoru: a2opt=/ft)
Współczynnik efektywności obliczamy korzystając ze wzoru: s =Qa. N Sprawność uzyskujemy z
20 1. Zdarzenia i prawdopodobieństwo b) co najmniej jednego orła. Wskazówka. Skorzystać ze wzoru z
więcej podobnych podstron