029 2
29
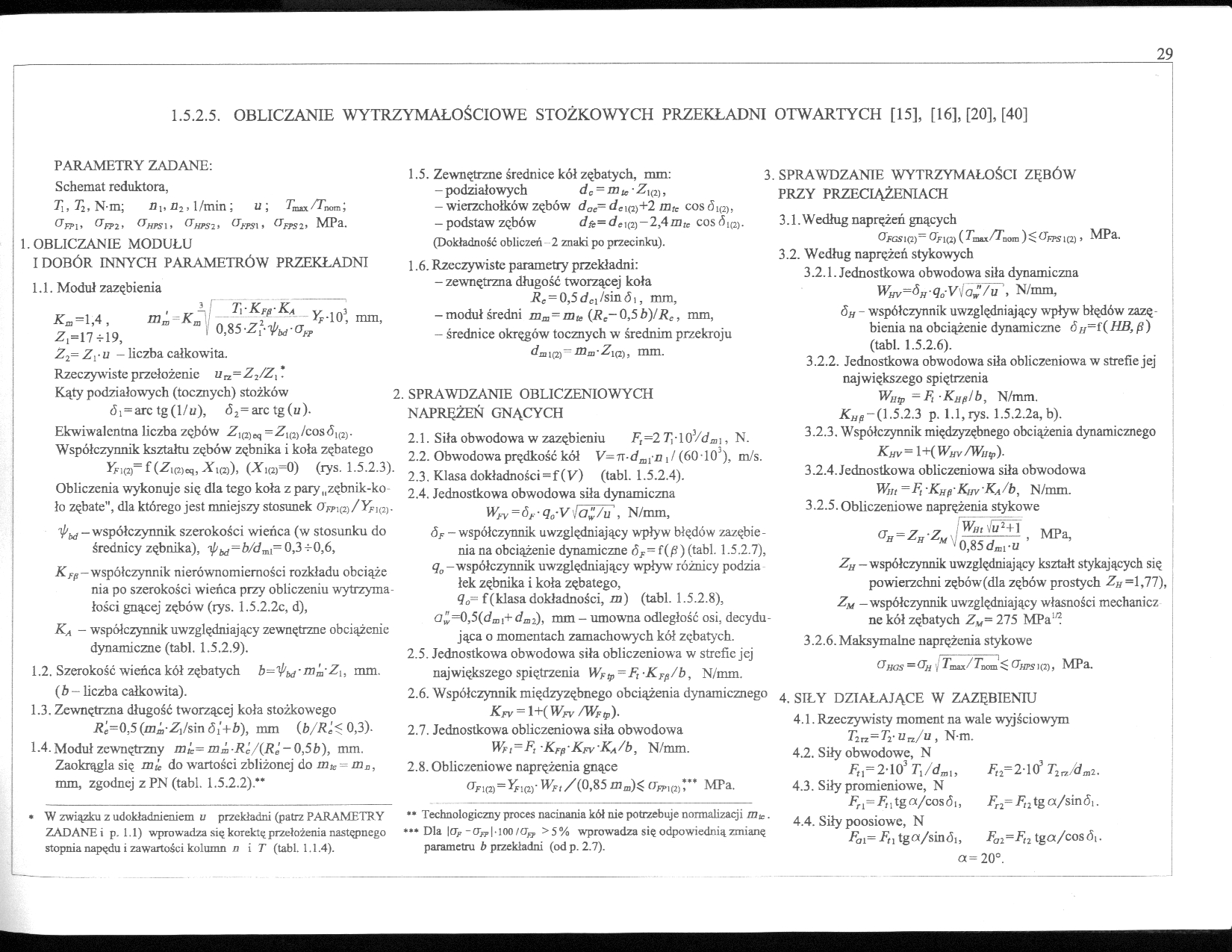
1.5.2.5. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI OTWARTYCH [15], [16], [20], [40]
. 1A TfKpg-Kjj .
"•“M nun’
PARAMETRY ZADANE:
Schemat reduktora,
Ti, Tii N-m; 1J »1/min ; u ; Taax
Vjn>\, <7ra>2> rr«fsi, (Thpsu ^fps\ > ^fpS2> MPa.
1. OBLICZANIE MODUŁU I DOBÓR INNYCH PARAMETRÓW PRZEKŁADNI
1.1. Moduł zazębienia
*.=1,4,
-£, = 17*19,
Z1=Zi-u - liczba całkowita.
Rzeczywiste przełożenie u„=Z2/Zt ?
Kąty podziałowych (tocznych) stożków 2
ó,=arc tg(l/u), <52=arc tg (u).
Ekwiwalentna liczba zębów Z,{2)eq =Zl(2)/cos<5ip). Współczynnik kształtu zębów zębnika i koła zębatego
Irip)=f(Z’ip)Cq,A,®), (Xi(2)=0) (rys. 1.5.2.3). Obliczenia wykonuje się dla tego koła z pary „zębnik-ko ło zębate", dla którego jest mniejszy stosunek Orr\<$/YF]m.
Tpw - współczynnik szerokości wieńca (w stosunku do średnicy zębnika), Tpbd=b/dml= 0,3 *0,6,
Krp-współczynnik nierównomiemości rozkładu obciążę nia po szerokości wieńca przy obliczeniu wytrzymałości gnącej zębów (rys. 1.5.2.2c, d),
Ka - współczynnik uwzględniający zewnętrzne obciążenie dynamiczne (tabl. 1.5.2.9).
1.2. Szerokość wieńca kół zębatych b=i/u‘mm’Zl, mm.
(b - liczba całkowita).
1.3. Zewnętrzna długość tworzącej koła stożkowego
R'e-0,5(wa Zi/smdi+b), mm (h/Rj< 0,3).
1.4. Moduł zewnętrzny mlc= mi RĆ/(RŚ-0,5b), mm. Zaokrągla się mi do wartości zbliżonej do tntc = m„, mm, zgodnej z PN (tabl. 1.5.2.2).1 2
• W związku z udokładnieniem u przekładni (patrz PARAMETRY ZADANE i p. 1.1) wprowadza się korektę przełożenia następnego stopnia napędu i zawartości kolumn n i T (tabl. 1.1.4).
1.5. Zewnętrzne średnice kół zębatych, mm: 3
-podziałowych </c = mte-Zl(2),
- wierzchołków zębów doe= deY0)+2 m!c cos <51(2),
- podstaw zębów d{c=de\ę>)-2,4mtt cos ó1(2). (Dokładność obliczeń 2 znaki po przecinku).
1.6. Rzeczywiste parametry przekładni:
- zewnętrzna długość tworzącej koła
J?c = 0,5dcl/sin<5i, mm,
-moduł średni mm=mte (Re-0,5 b)/Rc, mm,
- średnice okręgów tocznych w średnim przekroju
fflm'Zlę1), mm.
. SPRAWDZANIE OBLICZENIOWYCH NAPRĘŻEŃ GNĄCYCH
2.1. Siła obwodowa w zazębieniu F,=2 T,-l02/dmi, N.
2.2. Obwodowa prędkość kół V=n-dmln ,/ (60T0J), m/s.
2.3. Klasa dokładności =f(Y) (tabl. 1.5.2.4).
2.4. Jednostkowa obwodowa siła dynamiczna
Wj.-v = óF • q0-V •Ja “/u ‘, N/mm, óF - współczynnik uwzględniający wpływ błędów zazębienia na obciążenie dynamiczne <5jr= f(/ł) (tabl. 1.5.2.7), qo - współczynnik uwzględniający wpływ różnicy podzia łek zębnika i koła zębatego,
<70= f(klasa dokładności, m) (tabl. 1.5.2.8), O^=0,5(dml+ dal), mm - umowna odległość osi, decydująca o momentach zamachowych kół zębatych.
2.5. Jednostkowa obwodowa siła obliczeniowa w strefie jej największego spiętrzenia Wrtp =Ft 'K^/b, N/mm.
2.6. Współczynnik międzyzębnego obciążenia dynamicznego
KFV = l+(WFV/WFlp).
2.7. Jednostkowa obliczeniowa siła obwodowa
Wf,=F, KFp Kfv KA/b, N/mm.
2.8. Obliczeniowe naprężenia gnące
Orip)=lri(2)‘ H^i/(0,85 Ojnpjt * MPa.
. SPRAWDZANIE WYTRZYMAŁOŚCI ZĘBÓW PRZY PRZECIĄŻENIACH
3.1 .Według naprężeń gnących
0>CS1(2)= Of!(2) (Tmaj/Tnonó^Ojrism), MPa.
3.2. Według naprężeń stykowych
3.2.1. Jednostkowa obwodowa siła dynamiczna
Wj,v=6„q0Vfa^Tu\ N/mm, óH - współczynnik uwzględniający wpływ błędów zazębienia na obciążenie dynamiczne (5 H=t ( HB, fi) (tabl. 1.5.2.6).
3.2.2. Jednostkowa obwodowa siła obliczeniowa w strefie jej największego spiętrzenia
WHtp -F, ■ Knf,/b, N/mm.
KHę-{ 1.5.2.3 p. 1.1,rys. 1.5.2.2a,b).
3.2.3. Współczynnik międzyzębnego obciążenia dynamicznego
KHv=\+{Whv/Wiiv).
3.2.4. Jednostkowa obliczeniowa siła obwodowa
Wm =F, -KttfKiiy-KA/b, N/mm.
3.2.5. Obliczeniowe naprężenia stykowe
ZH — współczynnik uwzględniający kształt stykających się powierzchni zębów(dla zębów prostych ZH =1,77), ZM -współczynnik uwzględniający własności mechanicz ne kół zębatych Zw= 275 MPa'1’!
3.2.6. Maksymalne naprężenia stykowe
@HGS ~Tom \ -U.py 1(2), MPa.
4. SIŁY DZIAŁAJĄCE W ZAZĘBIENIU
4.1. Rzeczywisty moment na wale wyjściowym
Titz=Trua/u, N-m.
4.2. Siły obwodowe, N
En=2-103 Tx/dmx, Ftl= 2103 T2n/da2.
4.3. Siły promieniowe, N
Fn=Ftltg cx/cos ó i, Fr2= Fn tg a/sinó,.
4.4. Siły poosiowe, N
Fal= F,i tg«/sin<5i, Fal=Fn tga/cosó,.
a= 20°.
Technologiczny proces nacinania kół nie potrzebuje normalizacji mx.
Dla \(TF - (Jfp | ■ 100 / Gyy, >5% wprowadza się odpowiednią zmianę parametru b przekładni (od p. 2.7).
Wyszukiwarka
Podobne podstrony:
029 3 291.5.2.5. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI OTWARTYCH [15], [16], [20], [40]
029 4 291.5.2.5. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI OTWARTYCH [151, [16], [20], [40]
kurmaz029 291.5.2.5. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI OTWARTYCH [15], [16], [20],
028 2 281.5.2.4. OBLICZANIE WYTRZYMAŁOŚCIOWE WALCOWYCH PRZEKŁADNI OTWARTYCH [15], [16], [20], [21] m
028 2 1.5.2.4. OBLICZANIE WYTRZYMAŁOŚCIOWE WALCOWYCH PRZEKŁADNI OTWARTYCH [15], [16], [20], [21] 3.2
027 2 271.5.2.3. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI ZAMKNIĘTYCH [15], [16], [21],
027 2 271.5.2.3. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI ZAMKNIĘTYCH [15], [16], [21],
271.5.2.3. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI ZAMKNIĘTYCH [15], [16], [21],
271.5.2.3. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI ZAMKNIĘTYCH [15], [16], [21],
026 2 261.5.2.2. OBLICZANIE WYTRZYMAŁOŚCIOWE WALCOWYCH PRZEKŁADNI ZAMKNIĘTYCH [2], [3], [4], [15], [
026 2 1.5.2.2. OBLICZANIE WYTRZYMAŁOŚCIOWE WALCOWYCH PRZEKŁADNI ZAMKNIĘTYCH [2], [3], [4], [15], [17
kurmaz026 1.5.2.2. OBLICZANIE WYTRZYMAŁOŚCIOWE WALCOWYCH PRZEKŁADNI ZAMKNIĘTYCH [2], [3], [4], [15],
kurmaz027 27 27 y T,KmKa ym ^lO3, 1ó u 1.5.2.3. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI
77183 Str072 (4) 72 5.3.6. OBLICZANIE STOŻKOWYCH PRZEKŁADNI OTWARTYCH, wg [15,38,48,51,52,53] T
IMG00072 725.3.6. OBLICZANIE STOŻKOWYCH PRZEKŁADNI OTWARTYCH, wg [15,38,48,51,52,53] T2 kHp kA 103 v
więcej podobnych podstron