kurmaz027
27
27
y T,KmKa ym
^lO3,
1ó
u
1.5.2.3. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI ZAMKNIĘTYCH [15], [16], [21], [40]
dla zginania Kpy-1+( Wpy/ttFtp)-3.4. Jednostkowa obwodowa siła obliczeniowa przy zginaniu

^*=1,77 (L5.2.1 p. 2.8)),
Zm=215 MPa172 (1.5.2.1 p. 2.8)).
3. SPRAWDZANIE OBLICZENIOWYCH NAPRĘŻEŃ GNĄCYCH
3.1. Jednostkowa obwodowa siła dynamiczna
Wrv=óF-q0-V^a”/u , N/mm, d,= f (0) (tabl. 1.5.2.7 dla /?= 0°).
3.2. Jednostkowa obwodowa siła obliczeniowa w strefie jej największego spiętrzenia przy zginaniu
Wr^Ę-Krplb, N/mm,
Ft (p. 2.1), KFp (rys. 1.5.2.2c, d).
3.3. Współczynnik międzyzębnego obciążenia dynamicznego
* Technologiczny proces nacinania kół nie potrzebuje normalizacji m *. ** W związku z udokładnieniem u przekładni (patrz PARAMETRY ZADANE i p. 1.8) wprowadza się korektę przełożenia następnego stopnia napędu i zawartości kolumn a i T (tabl. 1.1.4).
"* Dla | aH - agp J100 / (Jjjp >5% wprowadza się jdpowiednią zmianę parametru b przekładni (od p. 2.7).
PARAMETRY ZADANE:
: Schemat reduktora,
7), T2, N m; n i, n2 > Ltninj w, 7maxSToom]
&HP, Ofpi, (Jpp2, ®HFS 1> <7hW2> ®FPS\ j &FPS2> MPa.
i 1. OBLICZANIE ŚREDNICY ZĘBNIKA I I DOBÓR INNYCH PARAMETRÓW PRZEKŁADNI
1.1. Średnica zębnika
dLx=Kd
Kd=ll MPa1/3 - dla kół o zębach prostych, ipfoj - współczynnik szerokości wieńca (w stosunku do średnicy zębnika), = b/dml=0,3-^0,6,
KHp- współczynnik nierównomiemości rozkładu obciążenia wzdłuż linii styku, Knp=f(HB, rozmieszczenie kół względem łożysk, jpbd ) (rys. 1.5.2.2a, b), KA - współczynnik uwzględniający zewnętrzne obciążę nie dynamiczne (tabl. 1.5.2.9).
1.2. Szerokość wieńca kół zębatych b^ipwdmu mm, b - liczba całkowita.
1.3. Kąty podziałowych (tocznych) stożków
j <5j = arc tg (1/łi), Ó2=arctg(u)-
1.4. Zewnętrzna długość tworzącej koła stożkowego
1 R^O^^j/sinóI+b), mm (b/R^ 0,3).
1.5. Zewnętrzna podziałowa średnica zębnika
; d^=d^R;/(R’-0,5b), mm.
1.6. Przyjmuj ąc wstępnie Zj=17 oblicza się moduł zazębię nia zewnętrzny m'(e = d^iZi i zaokrągla do war tości zbliżonej do mle-ma> mm, zgodnej z PN* (tabl. 1.5.2.2), (in«. ^(1/8^1/10)6, mnij.
1.7. Liczba zębów zębnika Źj = djx/mte.
Liczba zębów koła zębatego Z2-Zvu,
Zx, Z2- liczby całkowite.
1.8. Rzeczywiste przełożenie przekładni Uiz=Z2/Zi**
1.9. Rzeczywiste kąty stożków podziałowych
ó1=arctg(l/ulz), (52=arc tg(i/I2). i 1.10. Zewnętrzne średnice kół zębatych, mm ; - podziałowych de 1(2) = m ta ■ Z1(2),
- wierzchołków zębów daeU2)=de i(2)+2 OTte cos<5i(2),
- podstaw zębów dfei(2)~de i(2)-2,4 mw cosóip).
i 1.11. Rzeczywista zewnętrzna długość tworzącej koła
jRe-OjSdei/sinÓ!, mm.
| 1.12. Rzeczywisty średni moduł
mm=mic (Re-0,5b)/Re, mm.
1.13. Rzeczywiste średnie średnice kół dsn\(2) — mn>‘Z 1(2), mm.
2. SPRAWDZANIE OBLICZENIOWYCH NAPRĘŻEŃ STYKOWYCH
2.1. Siła obwodowa w zazębieniu Ę=27j-103/dmI, N.
2.2. Obwodowa prędkość kół V=n dml fli/(60 T03X tm'8-
2.3. Klasa dokładności=f(V) (tabl. 1.5.2.4),
2.4. Jednostkowa obwodowa siła dynamiczna
WHV=ÓH'q0V 'la”/u , N/mm,
(1.5.2.1 p. 2.4 i tabl. 1.5.2.6,1.5.2.8), oj=0,5(dn,1+dm2), mm umowna odległość osi, decydująca o momentach zamachowych kół zębatych.
2.5. Jednostkowa obwodowa siła obliczeniowa w strefie jej największego spiętrzenia
Wjjip=Ft •Kjjp/b, N/mm.
2.6. Współczynnik międzyzębnego obciążenia dynamicznego
K^l+iWny/W^).
2.7. Jednostkowa obliczeniowa siła obwodowa
Wht= Ft "Kup 'Kjiv Ki/b, N/mm.
2.8. Obliczeniowe naprężenia stykowe
Wn —Ft ‘Kpp ■ Kpy Ka/ b, N/mm.
3.5. Współczynnik kształtu zębów zębnika i koła zębatego
Ę'i(2) = f (^jes, -Yi<2>), (Yi(2)=0) (rys. 1.5.2.3). Dla zębów prostych Z]{2) ^=Z1(2) /cos ól(2).
Obliczenia wykonuje się dla tego koła z pary„zębnik-koło zębate”, dla którego jest mniejszy stosunek .
3.6.Obliczeniowe naprężenia gnące
ap\ęr)—^Fi($’Wpt/(0$5nim)^Ofpi(2), MPa.
4. SPRAWDZANIE WYTRZYMAŁOŚCI ZĘBÓW PRZY PRZECIĄŻENIACH
4.1. Według naprężeń stykowych
0“HGS — Gr 17max/7jiom ^0JiKS](2), MPa.
4.2. Według naprężeń gnących
0>»S1(2)= 0>1<2) (Tnas/Ęiora) MPa.
5. SIŁY DZIAŁAJĄCE W ZAZĘBIENIU
5.1. Rzeczywisty moment na wyjściowym wale
T2a=T2-ua/u, Nm.
5.2. Siły obwodowe, N
Ę1=2103ri/rfJDl> Ę2=2T03 T2TŁ/da2.
5.3. Siły promieniowe, N
Fn^Fn tga/cosót, Fr2=Fn tga/sinÓi.
5.4. Siły poosiowe, N
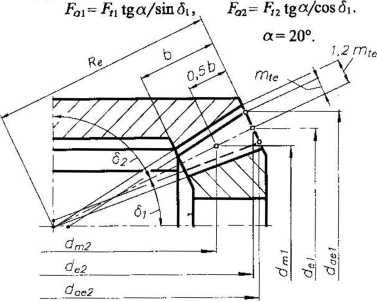
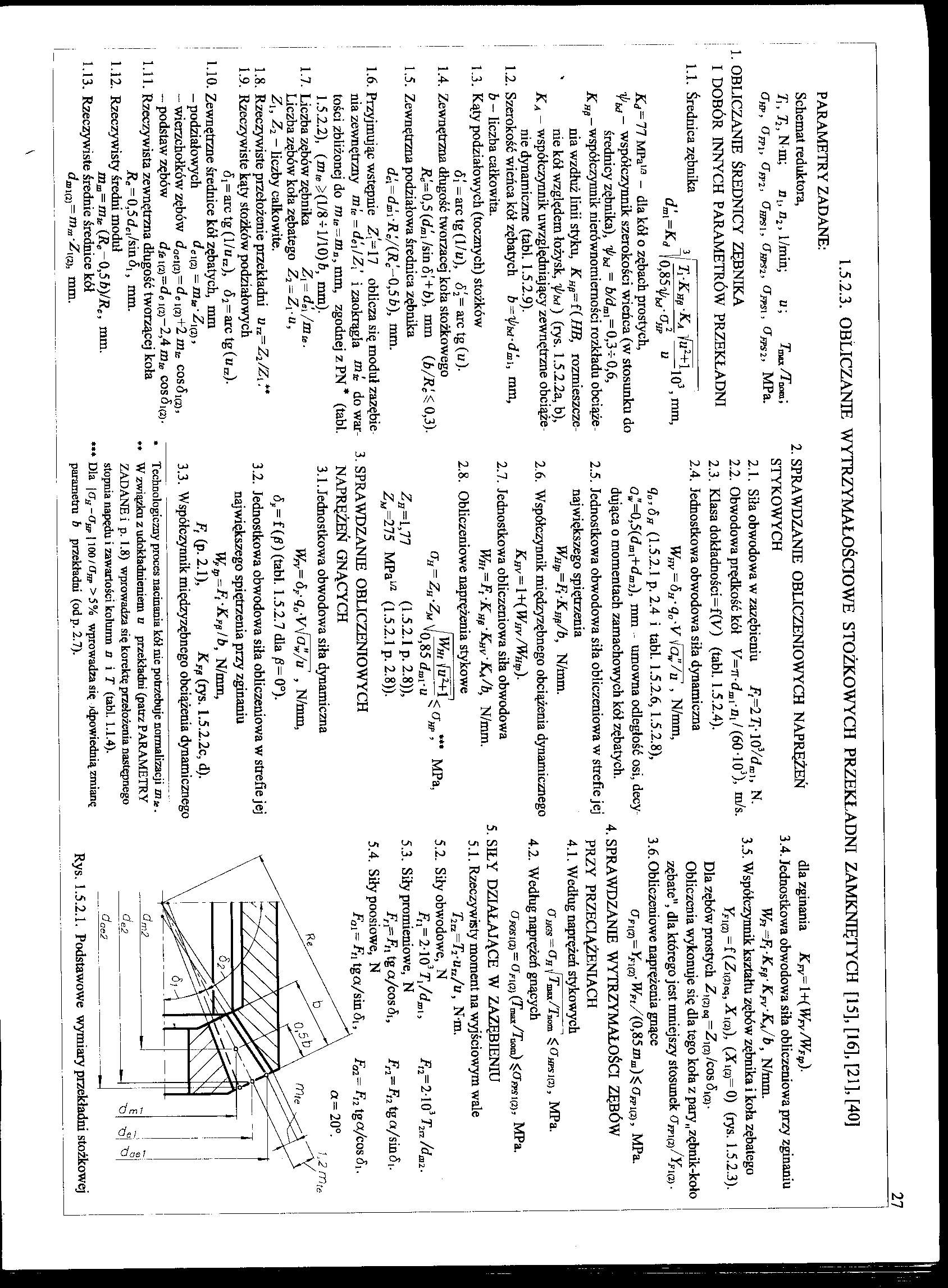
Rys. 1.5.2.1. Podstawowe wymiary przekładni stożkowej
Wyszukiwarka
Podobne podstrony:
kurmaz029 291.5.2.5. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI OTWARTYCH [15], [16], [20],
027 2 271.5.2.3. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI ZAMKNIĘTYCH [15], [16], [21],
027 2 271.5.2.3. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI ZAMKNIĘTYCH [15], [16], [21],
029 2 291.5.2.5. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI OTWARTYCH [15], [16], [20], [40]
029 3 291.5.2.5. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI OTWARTYCH [15], [16], [20], [40]
029 4 291.5.2.5. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI OTWARTYCH [151, [16], [20], [40]
271.5.2.3. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI ZAMKNIĘTYCH [15], [16], [21],
271.5.2.3. OBLICZANIE WYTRZYMAŁOŚCIOWE STOŻKOWYCH PRZEKŁADNI ZAMKNIĘTYCH [15], [16], [21],
kurmaz153 1532.2. OBLICZANIE WYTRZYMAŁOŚCIOWE ELEMENTÓW PRZEKŁADNI [20], [21], [27], [28] (Na przykł
2.2. OBLICZANIE WYTRZYMAŁOŚCIOWE ELEMENTÓW PRZEKŁADNI [20], [21], [27], [28] ; (Na przykładzie
153 2 1532.2. OBLICZANIE WYTRZYMAŁOŚCIOWE ELEMENTÓW PRZEKŁADNI [20], [21], [27], [28] (Na przykładzi
1532.2. OBLICZANIE WYTRZYMAŁOŚCIOWE ELEMENTÓW PRZEKŁADNI [20], [21], [27], [28] (Na przykładzie
kurmaz026 1.5.2.2. OBLICZANIE WYTRZYMAŁOŚCIOWE WALCOWYCH PRZEKŁADNI ZAMKNIĘTYCH [2], [3], [4], [15],
kurmaz026 26 26 1.5.2.2. OBLICZANIE WYTRZYMAŁOŚCIOWE WALCOWYCH PRZEKŁADNI ZAN) (wg parametru aw)
026 2 261.5.2.2. OBLICZANIE WYTRZYMAŁOŚCIOWE WALCOWYCH PRZEKŁADNI ZAMKNIĘTYCH [2], [3], [4], [15], [
028 2 281.5.2.4. OBLICZANIE WYTRZYMAŁOŚCIOWE WALCOWYCH PRZEKŁADNI OTWARTYCH [15], [16], [20], [21] m
026 2 1.5.2.2. OBLICZANIE WYTRZYMAŁOŚCIOWE WALCOWYCH PRZEKŁADNI ZAMKNIĘTYCH [2], [3], [4], [15], [17
więcej podobnych podstron