DSCN0610

256 6. Przekładnie zębate stożkowe
dostosowane do metod obróbki sposoby postępowania przy obliczeniach geometrycznych i wytrzymałościowych, oparte na ich wieloletnim doświadczeniu. Wytyczne te zawierają wzory i współczynniki określające proporcje wymiarowe zębów zestawione w tabelach lub na wykresach, a niekiedy nawet tabele gotowych wymiarów uzębień.
Bliższe dane dotyczące parametrów zarysów stosowanych w różnych systemach uzębień związanych z poszczególnymi metodami kształtowania zębów znajdzie czytelnik w literaturze: [19], [45], [63] i [67].
6.4. Kinematyka przekładni stożkowej
Pojedyncza, trzyelementowa przekładnia stożkowa (rys. 6.15a), składająca się z korpusu O wiążącego koła, zębnika I i koła 2, może być rozpatrywana jako mechanizm o trzech osiach obrotu: a0l, a02 i a12, przecinających się w jednym punkcie. Osie n01 i a02 są odpowiednio osiami zębnika i koła, a oś a12, stanowiąca linię styku stożków tocznych, jest chwilową osią względnego obrotu kół. Oznacza-
b)
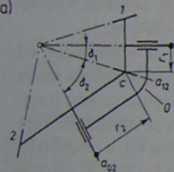
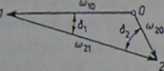
Rys. 6.15. Wykres prędkości kątowej przekładni stożkowej: a) schemat przekładni, b) wykres prędkości kątowej
jąc leżące na tych osiach wektory prędkości kątowej ©0I, ©20 i co12, można napisać równanie wektorowe:
©oi + ©i 2 + ©20 — 0*
Stąd prędkość kątowa koła, przy znanej prędkości zębnika, wynosi
(6.4)
©20 — “ ®12~©01 ©20 = ©2 0 ©21 •
(6.5)
lub
(6.6)
Zależność (6.6) przedstawiono graficznie na wykresie prędkości kątowych przez wielobok wektorów (rys. 6.15b). Kierunki wektorów są przy tym równolegle do przynależnych im osi a0i, a02 i «i2 (rys. 6.15a), a zwroty skierowane do punktu wieloboku oznaczonego pierwszą z dwu cyfr oznaczających wektor, np. wektor <pj0 jest skierowany do punktu 1, a jego koniec znajduje się przy punkcie O.
Według tego schematu można także utworzyć wykresy prędkości kątowych wieloelementowych przekładni stożkowych, zwłaszcza stożkowych przekładni obie-
gowych. Na podstawie wykresu prędkości można łatwo wyprowadzić analityczne związki określające przełożenie przekładni.
Zależność między wartościami kątów stożków tocznych ó0\ * 602 a prędkościami kątowymi col0 i co2o wyznacza wzór sinusów (rys. 6.1Sb):
® o sin5,
-= -—r-. lo •/)
(Oji> ' sind2
Z warunku równości prędkości obwodowych na stożkach tocznych w punkcie C:
»cio = «C20 = 'i «io = r2(o20, (6.8)
przy uwzględnieniu wynikającej z rys. 6.1Sa zależności
sind2 sin 61
' (6 9)
oraz proporcjonalności długości promieni r2 i r2 obu kół do ich liczb zębów ż, i z2, można wyznaczyć przełożenie przekładni:
(6.10)
. <01© __ _ sin<52 rj zj
: 0)20 sin5, r4 zx
W przekładniach stożkowych bez przesunięcia zarysu lub z przesunięciem zarysu przy xz — 0 stożki toczne pokrywają się ze stożkami podziałowymi, a kąt osi przekładni jest równy sumie kątów stożków podziałowych:
Z = 5i+52. (6.11)
Wówczas przełożenie geometryczne wynosi
z2 sin(2T—5.) sinTcosó. — cosZsinó. sinZ • ,, r
u = — = ——---—-= ——cosZ. (6.12)
Zi sin di sin di tgd(
Stąd można wyznaczyć kąty stożków podziałowych:
tg 51 -- oraz tg<52 =—--. (6.13)
+cosZ —+cosZ
zx Z2
W przypadku przekładni ortogonalnej, gdy Z = di+d2 = 90°, przełożenie geometryczne wynosi
M_£ł=B!|!i|i = ctgd1 =tgd2. (6.14)
zx sind,
a kąty stożków podziałowych można wyznaczyć z wzorów:
tg £. = - = — oraz tgd2 = h = —. (6.15)
u z2
17 - Przekładnie zębate
Wyszukiwarka
Podobne podstrony:
DSCN0609 254 6. Przekładnie zębate stożkowe Walec dopełniający jest styczny do sfery I na linii środ
DSCN0618 272 6. Przekładnie zębate stożkowe do określenia parametrów walcowych kół zastępczych
DSCN0607 250 6. Przekładnie zębate stożkowe Kołem zębatym tworzącym przekładni stożkowej nazywamy wy
DSCN0612 260 6. Przekładnie zębate stożkowe 6.5.3. Kąt pochylenia linii zęba Kąt pochylenia linii zę
DSCN0620 278 6. Przekładnie zębate stożkowe przypadku ujemna składowa osiowa przy przełożeniach u ^
DSCN0604 6. Przekładnie zębate stożkowe 6.1. Rodzaje przekładni stożkowych W przypadku wałów o osiac
DSCN0611 6. Przekładnie zębate stożkowe 6.5. Geometria przekładni stożkowych 6.5.1. Liczby zębów zęb
DSCN0617 6. Przekładnie zębate stożkowe cd. labL &S Parametry i oznaczenia Wzory i
DSCN0619 6. Przekładnie zębate stożkowe Liczby zębów walcowych kół zastępczych oblicza się z wzorów:
st2 300 5. PRZEKŁADNIE ZĘBATE STOŻKOWE Przyjmujemy współczynnik szerokości wieńca = 0,3. Obliczamy
st4 302 5. PRZEKŁADNIE ZĘBATE STOŻKOWE 302 5. PRZEKŁADNIE ZĘBATE STOŻKOWE Zz = Zz2 = dzi = dZ2
st6 5. PRZEKŁADNIE ZĘBATE STOŻKOWE w=z1v r^z 100 V u2 + 1 26 • 7,03 j 2.3462 100 Y 2,3462 + 1 = 1,68
st8 306 5. PRZEKŁADNIE ZĘBATE STOŻKOWE tg^/i = ąT = = 0-027
Uproszczony zapis postaci geometrycznej przekładni zębatej stożkowej w przekroju i w
NAUKA I TECHNIKA nie zużycia poddano przekładnie zębate stożkowe i łożyska bębnów roboczych. Dla oce
DSCN0605 246 6. Przekładnie zębate stożfcowc wanie osi kól może wystąpić na skutek odkształceń wałów
DSCN0606 248 6. Przekładnie zębate stołkowe Rys. 64- Schemat tworzenia zazębienia oktoidalnego. I i
DSCN0608 252 6. Przekładnie zębate słoikowe wych (rys. 6.9). Głowice nożowe obracają się w płaszczyz
więcej podobnych podstron