Scan0012 2
© J. Pelc WMT.doc/23
MOMENTY BEZWŁADNOŚCI FIGUR PŁASKICH. DEFINICJE
Moment bezwładności:
I, = J y
A
1 y = jx2dA A
I0 = \p2dA
A
(biegunowy)

|
ty |
I0 >0 | |
|
ty- |
ło |
> lxy (' |
lxy = \xydA A
- względem osi *
- względem osi y
- względem p. O
= J(*2 +y2)dA = Jx + Iy
A
- dewiacji (zboczenia)
TWIERDZENIE STEINERA

I* = J y2dA = J (b + yc fdA =
A A
- b21 dA + 2b\ yc dA + j y2dA = \x +b2 A
A A A
= 0 lxc
|
Ix = lXc + b2A |
<N -O 1 II |
|
ly~ Iyc + G2 A |
Iyc = Iy~ a2 A |
Io = Jr“dA - lx + 1^. = I v + b2 A + \y + a2 A - I v +1yc + (a2 + £2)A - Ic + r2 A
A
Ijty = \xydA = j(a + Xc)(b + yc)dA = ab\dA + a\ yc dA + b\ Xc dA + JXcyc.dA = Ixy + abA A A A ASX=0 ASye= o A
MOMENTY BEZWŁADNOŚCI WZGLĘDEM OSI OBRÓCONYCH
Momenty bezwładności i momenty dewiacji można zestawić w postaci macierzy (tablicy)
(OJ. Fele WMT.doc/24
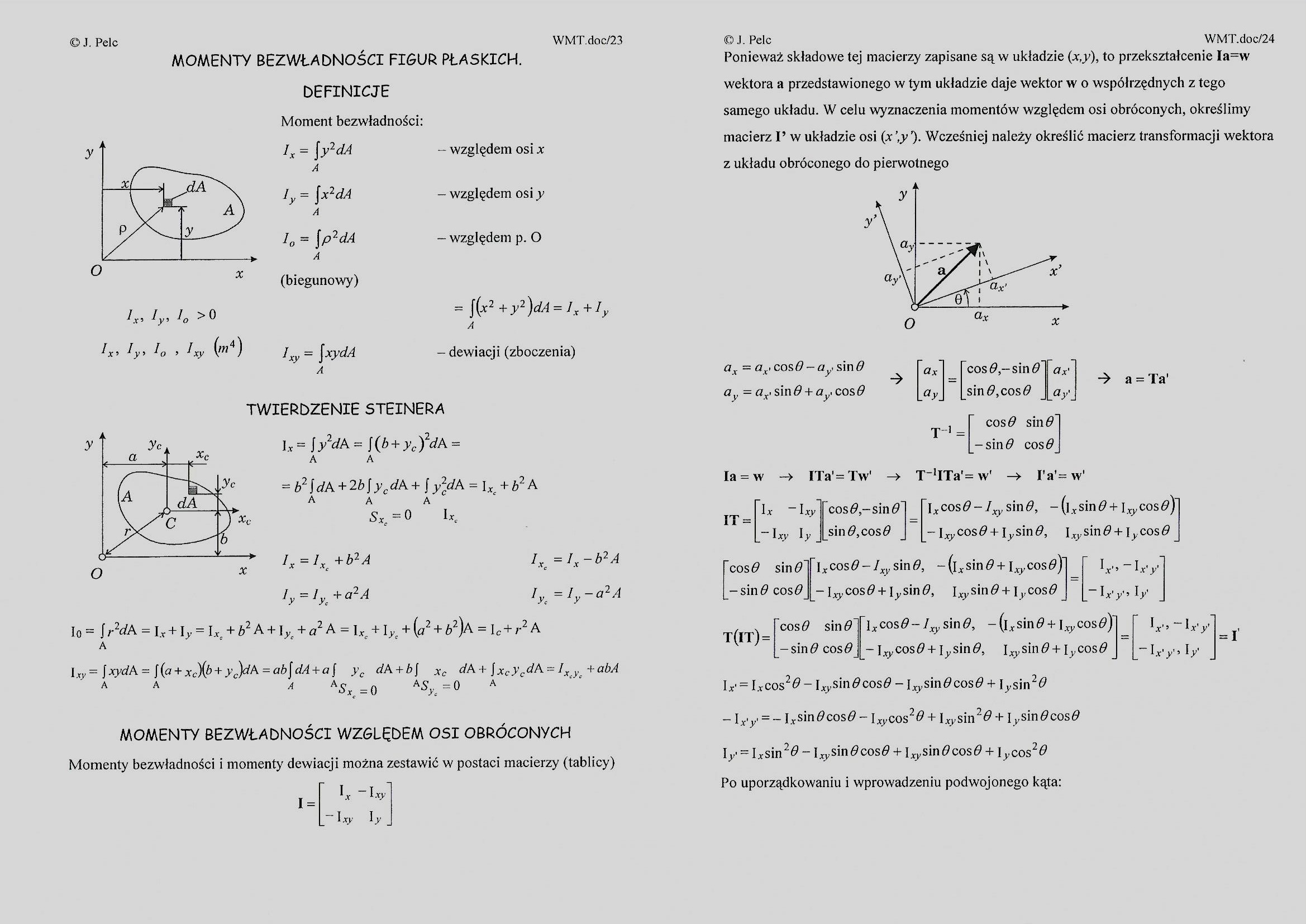
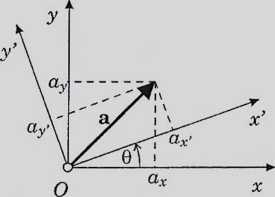
Ponieważ składowe tej macierzy zapisane są w układzie (x,y), to przekształcenie Ia=w
wektora a przedstawionego w tym układzie daje wektor w o współrzędnych z tego
samego układu. W celu wyznaczenia momentów względem osi obróconych, określimy
macierz I* w układzie osi Wcześniej należy określić macierz transformacji wektora z układu obróconego do pierwotnego
|
ax |
cos#,-sin# |
aX' | |
|
_<*y. |
sin#, cos# |
_ay'_ |
-> a = Ta'
T i =
ar = cos#-a„. sin#
a„ = aY< sin# + fl„. cos#
y -v y
cos# sin# -sin# cos#
la = w -» ITa'= Tw' T_1ITa'= w* -> I'a'= w
|
Ia: Ijcy |
cos#,-sin# |
I*cos0-Jxvsin#, -(l xsin# + j^cos#) | |
|
1 Xy I y _ |
sin#, cos# |
- ix>.cos# +1 vsin#, ix>.sin# +1 vcos# |
Ixcos# — IXysin#, -(iJcsin# + lA>,cos#)
IT =
cos# sin# -sin# cos#
- I^,cos# + I^sin#, ijy,sin# +1 ,.cos#
]xcos#-/xvsin#, — (i^sin# + I^cos#) j, - lwcos# + i^sin#, l^,sin# + lv.cos#
Iy = IxCos2^~ I«,sin#cos# -lx„sin#cos# + I„sin2#
lx' I v'
cos# sin# -sin# cos#
r'> 1J
V
x y
~ I.r1 >■’» ł y'
- Ixy = ~ I-vsin#cos# - I*,,cos2# + I^sin2# + I vsin#cos# Iy = I jesin2# - Ixvsin#cos# + lxvsin#cos# + I vcos2#
Po uporządkowaniu i wprowadzeniu podwojonego kąta:
= 1
Wyszukiwarka
Podobne podstrony:
1384238V259107712940529077915 n OJ.FdcMOMENT* BEZWŁADNOŚCI FIGUR PŁASKICH. DEFINICJE Moment bezwładn
1384238V259107712940529077915 n OJ. Ptfc WMTdoc/23MOMENTY BEZWŁADNOŚCI FIGUR PŁASKICH. DEFINICJE Mom
Scan0004 2 © J. Pelc WMT.doc/7ROZCIĄGANIE I ŚCISKANIE PRĘTA. PRAWO HOOKE A © J. Pelc WMT.doc/7 £ = S
Scan0009 2 © J. Pelc WMT.doc/17DWUOSIOWY STAN NAPRĘŻENIA (PSN, 2-SN) © J. Pelc WMT.doc/17 t 9 <jx
Scan0014 2 © J. Pelc WMT.doc/27 (. h h- vi yz = )yCdydC = y 00jCdę dy = I yh2 (l - ^ J dy = n
Scan0018 2 © J. Pelc WMT.doc/35 © J. Pelc WMT.doc/35 ACZYSTE, SYMETRYCZNE ZGINANIE PRĘTÓW PROSTYCH B
Scan0020 2 © J. Pelc WMT.doc/39CZYSTE ZGINANIE - ROZKŁAD NAPRĘŻEŃ, OS OBOJĘTNAMp>
Scan0011 (14) ©J. Pelc WMT.doc/2AKSJOMAT BOLTZMANNA Udowodnimy, że naprężenia styczne o kierunkach p
Scan0011 (14) ©J. Pelc WMT.doc/21AKSJOMAT BOLTZMANNA Udowodnimy, że naprężenia styczne o kierunkach
Scan0013 (13) © J. Pelc WMT.doc/25 I.x + Iy , Ix"Iv 2 2 cos26 - xyśm2d cos 20 + xysm26 lX + y_
Scan0006 2 ©J. Pelc WMT.doc/11ZASADA SUPERPOZYCJI W układach liniowo sprężystych, skutek (reakcja, o
Scan0008 2 ©J. Pelc WMT.doc/15 Po uporządkowaniu wyrazów sy =~E[ay~v(orz+ax)} Stwi
Scan0015 2 ©J. Pelc WMT.doc/29 uSKRĘCANIE PRĘTÓW O PRZEKROJU KOLISTYM Założenia: 1.
więcej podobnych podstron