23
42
2.5. Błąd linii pozycyjnej
Linie pozycyjne w wyniku błędów, którymi obarczone pomiary wysokości, czasu, wartości stosowanych popraw obliczania i transformacji współrzędnych, są w istocie „rozmyte* mogą być traktowane jako pasy pozycyjne. Punkt prawdopodol linii pozycyjoej może być określony jako punkt znajdujący się najmniejszej odległości od pozycji zliczonej, znanej z pewn; przybliżeniem w momencie wykonania obserwacji. Punkt pra’ podobny alp wyraża największą gęstość prawdopodobień* łącznego wpływu pól błędu pozycji zliczonej i pasa pozycyji Ogólnie pole błędu pozycji zliczonej określane jest promieniem k< błędu postaci jak we wzorze (1.9). Jednakże pole błędu zliczenia wyniku uwzględnienia wpływu warunków zewnętrznych i inforl macji zawartej w określonej linii pozycyjnej może być traktoi jako elipsa błędu.
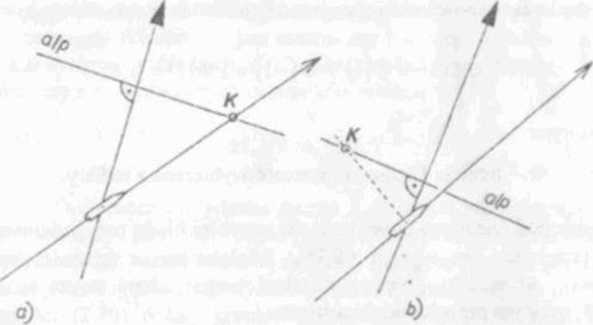
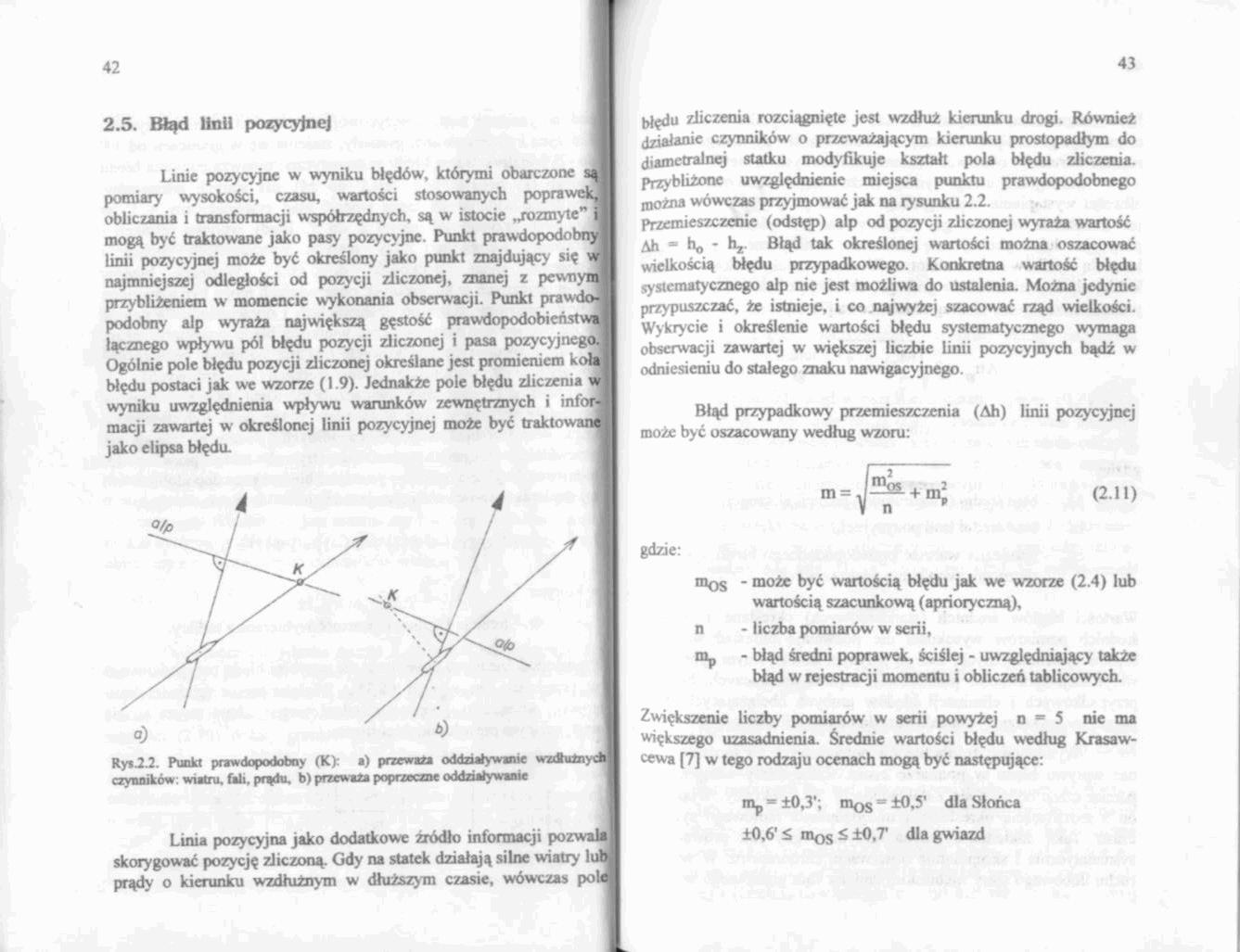
Ryt.2.2. Punkt prawdopodobny (K): a) przeważa oddziaływanie wzdłużny czynników: wiatru, fali. prądu, b) przeważa poprzeczne oddziaływanie
Linia pozycyjna jako dodatkowe źródło informacji poi skorygować pozycję zliczoną. Gdy na statek działają silne wiatry* li prądy o kierunku wzdłużnym w dłuższym czasie, wówczas poi
błędu zliczenia rozciągnięte jest wzdłuż kierunku drogi. Również działanie czynników o przeważającym kierunku prostopadłym do diametralnej statku modyfikuje kształt pola błędu zliczenia. Przybliżone uwzględnienie miejsca punktu prawdopodobnego można wówczas przyjmować jak na rysunku 2.2. przemieszczenie (odstęp) alp od pozycji zliczonej wyraża wartość Ah • 1Vj - hj. Błąd tak określonej wartości można oszacować wielkością błędu przypadkowego. Konkretna wartość błędu systematycznego alp nic jest możliwa do ustalenia. Można jedynie przypuszczać, że istnieje, i co najwyżej szacować rząd wielkości. Wykrycie i określenie wartości błędu systematycznego wymaga obserwacji zawartej w większej liczbie linii pozycyjnych bądź w odniesieniu do stałego znaku nawigacyjnego
Błąd przypadkowy przemieszczenia (Ah) linii pozycyjnej może być oszacowany według wzoru:
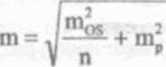
gdzie:
mQs - może być wartością błędu jak we wzorze (2.4) lub wartością szacunkową (aprioryczną),
n - liczba pomiarów w serii,
nip - błąd średni poprawek, ściślej - uwzględniający także błąd w rejestracji momentu i obliczeń tablicowych.
Zwiększenie liczby pomiarów w serii powyżej n * 5 nie ma większego uzasadnienia. Średnie wartości błędu według Krasaw-<*wa (7] w tego rodzaju ocenach mogą być następujące:
nip * ±0,3‘; m^s » ±0,5* dla Słońca ±0,6' £ mos £ ±0,7 dla gwiazd
Wyszukiwarka
Podobne podstrony:
42 2.5. Błąd Unii pozycyjnej Linie pozycyjne w wyniku błędów, którymi obarczone są pomiary wysokości
481 (4) Załącznik 8 481 b, sin A, współczynnik linii pozycyjnej. v, — losowy
24 r o nr 2or Rys. 1.5. Skala wykresu na kartce (Mpieni Wykreślenie linii pozycyjnych na kartce
50 Pasy linii pozycyjnych, rozpatrywane jako funkcje rozkładu prawdopodobieństwa, przedstawiają się
86 Dla linii pozycyjnych wzajemnie zależnych i jednakowo dokładnych (tj. charakteryzujących się taką
Scan0071 (11) Zawdzięczają to doświadczeniu zdobytemu przy obliczaniu linii pozycyjnej z obserwacji
86 Dla linii pozycyjnych wzajemnie zależnych i jednakowo dokładnych (Ij. charakteryzujących się taką
Określenie linii pozycyjnej z radionamiaru własnego w odwzorowaniu Merkatora NR - namiar radiowy
Określenie linii pozycyjnej z radionamiaru własnego w odwzorowaniu gnomonicznym: NR - namiar radiowy
Kształt linii pozycyjnej zależy od mierzonej wielkości - jest on uzależniony od zasady działania uży
NOkreślenie linii pozycyjnej z radionamiaru obcego w odwzorowaniu Merkatora: NR - namiar radiowy
289 (11) Prnkład. Dane są elcmenly linii pozycyjnych: Ah 2,2 , Ax — 218° dla momentu Tx =■ 22h 36* i
295 (11) Ryś / 15 20. Uproszczony sposób przesuwania linii pozycyjnej przy określaniu pozycji nicjcd
296 (12) się i wykreśla w pobliżu pozycji zliczonej, W celu przesunięcia pierwszej linii pozycyjnej
297 (10) / trójkąta CłłxP2 oblicza się wartość A określają^ zmianę wartości Ah pierwszej linii pozyc
304 (14) Tabela 15.1 Wartości kąta <P - /(mi/rn*. JA) (wg (8J) mi m* Kąt przecięcia się linii p
323 (10) Ogólną postać równania linii pozycyjnej wyraża się wzorem (16.11) Aę at+AX-b, - /„ gdzie: J
328 (14) Kierunki azymutów obu par linii pozycyjnych powinny być zgodne. Jeśli kierunki azymutów jed
więcej podobnych podstron