CCF20110103�012
0°
p
Technika badania narządu ruchu
mS.
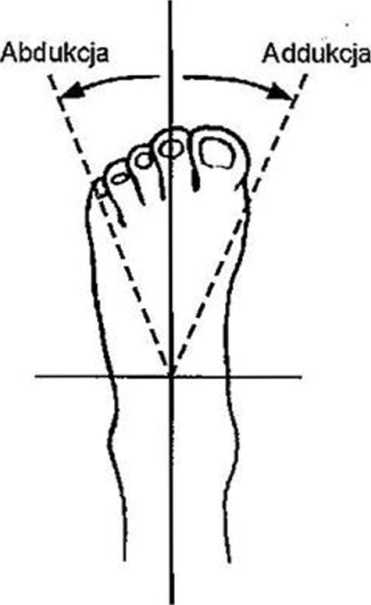
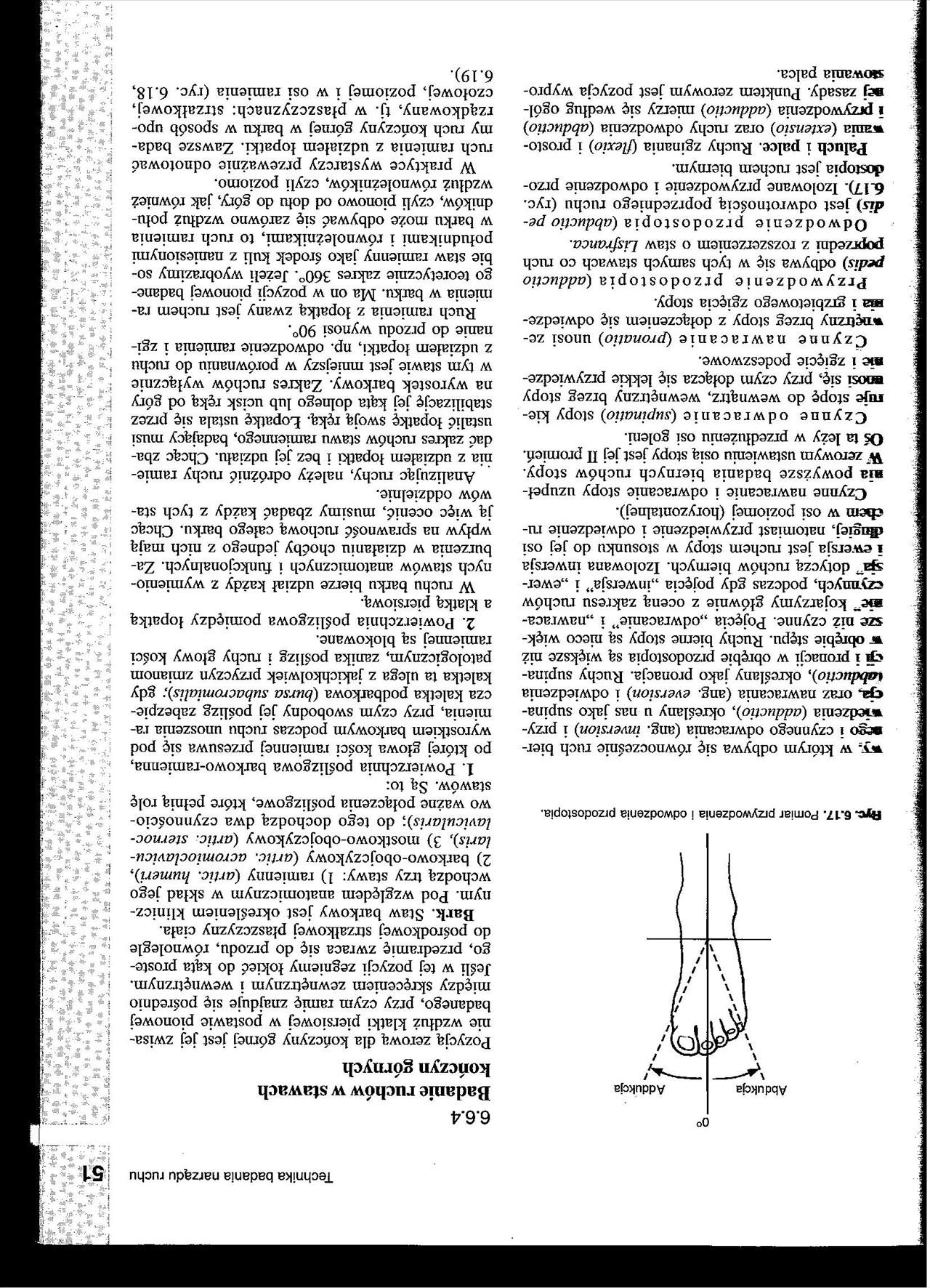
Bjc. 6.17. Pomiar przywodzenia i odwodzenia przodostopia.
wy. w którym odbywa się równocześnie ruch biernego i czynnego odwracania (ang. imersion) i przy-wiedzenia (adductio), określany u nas jako supina-cja. oraz nawracania (ang. eversion) i odwiedzenia iabductió), określany jako pronacja. Ruchy supina-cp i pronacji w obrębie przodostopia są większe niż w obrębie stępu. Ruchy bierne stopy są nieco większe niż czynne. Pojęcia „odwracanie” i „nawracanie- kojarzymy głównie z oceną zakresu ruchów czynnych, podczas gdy pojęcia „inwersja” i „ewer-sja” dotyczą ruchów biernych. Izolowana inwersja i ewersja jest ruchem stopy w stosunku do jej osi dfcngiej, natomiast przywieszenie i odwiedzenie niebem w osi poziomej (horyzontalnej).
Czynne nawracanie i odwracanie stopy uzupełnia powyższe badania biernych ruchów stopy. W zerowym ustawieniu osią stopy jest jej II promień. Oś ta leży w przedłużeniu osi goleni.
Czynne odwracanie (supinatio) stopy kie-nije stopę do wewnątrz, wewnętrzny brzeg stopy ■nosi się, przy czym dołącza się lekkie przywiedze-rne i zgięcie podeszwowe.
Czynne nawracanie (pronatio) unosi zewnętrzny brzeg stopy z dołączeniem się odwiedze-na i grzbietowego zgięcia stopy.
Przywodzenie przodostopia (adductio pedis) odbywa się w tych samych stawach co ruch poprzedni z rozszerzeniem o staw Lisfranca.
Odwodzenie przodostopia (abductio pedis) jest odwrotnością poprzedniego ruchu (ryc. 6l17). Izolowane przywodzenie i odwodzenie przodostopia jest ruchem biernym.
Paluch i palce. Ruchy zginania (flexio) i prostowania (extensio) oraz mchy odwodzenia (abductio) i przywodzenia {adductio) mierzy się według ogólnej zasady. Punktem zerowym jest pozycja wyprostowania palca.
6.6.4
Badanie ruchów w stawach kończyn górnych
Pozycją zerową dla kończyny górnej jest jej zwisanie wzdłuż klatki piersiowej w postawie pionowej badanego, przy czym ramię znajduje się pośrednio między skręceniem zewnętrznym i wewnętrznym. Jeśli w tej pozycji zegniemy łokieć do kąta prostego, przedramię zwraca się do przodu, równolegle do pośrodkowej strzałkowej płaszczyzny ciała.
Bark. Staw barkowy jest określeniem klinicznym. Pod względem anatomicznym w skład jego wchodzą trzy stawy: 1) ramienny {artic. humeri), 2) barkowo-obojczykowy {artic. acromioclavicu-laris), 3) mostkowo-obojczykowy {artic. sternoc-lavicularis); do tego dochodzą dwa czynnościowo ważne połączenia poślizgowe, które pełnią rolę stawów. Są to:
1. Powierzchnia poślizgowa barkowo-ramienna, po której głowa kości ramiennej przesuwa się pod wyrostkiem barkowym podczas ruchu unoszenia ramienia, przy czym swobodny jej poślizg zabezpiecza kaletka podbarkowa {bursa subacromialis); gdy kaletka ta ulega z jakichkolwiek przyczyn zmianom patologicznym, zanika poślizg i mchy głowy kości ramiennej są blokowane.
2. Powierzchnia poślizgowa pomiędzy łopatką a klatką piersiową.
W mchu barku bierze udział każdy z wymienionych stawów anatomicznych i funkcjonalnych. Zaburzenia w działaniu choćby jednego z nich mają wpływ na sprawność mchową całego barku. Chcąc ją więc ocenić, musimy zbadać każdy z tych stawów oddzielnie.
Analizując mchy, należy odróżnić mchy ramienia z udziałem łopatki i bez jej udziału. Chcąc zbadać zakres mchów stawu ramiennego, badający musi ustalić łopatkę swoją ręką. Łopatkę ustala się przez stabilizację jej kąta dolnego lub ucisk ręką od góry na wyrostek barkowy. Zakres ruchów wyłącznie w tym stawie jest mniejszy w porównaniu do mchu z udziałem łopatki, np. odwodzenie ramienia i zginanie do przodu wynosi 90°.
Ruch ramienia z łopatką zwany jest mchem ramienia w barku. Ma on w pozycji pionowej badanego teoretycznie zakres 360°. Jeżeli wyobrazimy sobie staw ramienny jako środek kuli z naniesionymi południkami i równoleżnikami, to ruch ramienia w barku może odbywać się zarówno wzdłuż południków, czyli pionowo od dołu do góry, jak również wzdłuż równoleżników, czyli poziomo.
W praktyce wystarczy przeważnie odnotować ruch ramienia z udziałem łopatki. Zawsze badamy ruch kończyny górnej w barku w sposób uporządkowany, tj. w płaszczyznach: strzałkowej, czołowej, poziomej i w osi ramienia (ryc. 6.18, 6.19).
r*
; • V
W
V -T •*-
Ci
£ * #■ ,
z**:*
Cu
w-'
* *•
A*
ł*. *?*-*•&
*
a *
<v
ł
f- CS a* 1
1*-
* V
I
V
- £■ * ■
* £
F ». «
r+
. !
Sr *• =,
■ż * -
*<» «Ł
te*--.*-3
* 'ŚT* ▼
a *■ . TT
■s-
I
•i
SA-.
1
•• -c
Ti- -
*
tu'
Ki
lA."
;«r-
t;
o
<«r
*
W «• :ł-
«*..*•*
u. -
Wyszukiwarka
Podobne podstrony:
CCF20110103�010 Technika badania narządu ruchu Przywodzenie (adductio). Chory leży na wznak. Zgięcie
CCF20110103�014 Technika badania narządu ruchuK* równać zakres ruchów po obu stronach. Kąt obrotu wy
CCF20110103�016 -*>■ Technika badania narządu ruchu *>• i1.*.55 y;. -4* A. .+
CCF20110103�018 Technika badania narządu ruchu dający nakłada płaską rękę na grzbiet badanego i prze
Program specjalizacji w fizjoterapii Treści kształcenia 1. Technika badania narząd
CCF20110103�013 Badanie narządu ruchu 0° Ryc. 6.19. Pomiar skręcania ramienia do wewnątrz (rotatio i
CCF20120620�002 15. Podaj kolejność zastosowania technik badania fizykalnego w oce
Badanie czynności narządów - Technika1. Badanie zmian aktywności przy użyciu liczników scyntylacyjny
CCF20110108�005 BADANIE NARZĄDÓW JAMY
3. Dobieranie właściwych technik badania i oceny narządu ruchu, układu krążenia i
CCF20110103�001 Badanie narządu ruchu i wydarzeń, lecz nigdy nie powinien starać się naprowadzić cho
CCF20110103�003 f
CCF20110103�005 Badanie narządu ruchu -^1 " ifrJ I •V mm -.1:- -j : : a,- o Ryc. 6.5. Pomiar
CCF20110103�009 Badanie narządu ruchu fm jg% ’4 mtm Prostowanie (ezten^io). Chory leży na brzuchu i
CCF20110103�011 50 Badanie narządu ruchu -u */■* ad.. ... i- *: ~v •«■• - .•/..** j % r-1 !*v**.»3 r
CCF20110103�015 Badanie narządu ruchu W każdej części kręgosłupa jest możliwy ruch zginania (flexio)
CCF20110103�017 ^ S1! Iżwf: •*T.56 Badanie narządu ruchu to! V, i S fc; lis4fc •i* *f
CCF20110103�019 Badanie narządu ruchu Ocena ruchowych sprawności musi objąć ich • różne odmiany, jak
więcej podobnych podstron