227 (22)
454
16. Funkcje charakteryzujące obwody elektryczne

a po wykonaniu podobnych przekształceń jak w p. 16.12.2, otrzymujemy
. 2A ^ a>F(cu)cosa)f , , ,
rc(t) = f-j-2—dtu + AU (w0) cos co01. (16.127)
tt o (Oq CO
Całkę w tym wyrażeniu należy traktować w sensie wartości głównej, ze względu na nieograniczoność funkcji podcałkowej w punkcie co = co0.
Podstawiając ( = 0 do równania (16.127), znajdujemy
U(co0)=T(oo)--}-^^dco, (16.128)
nJ0co2-co6
bowiem rc(0 + ) = AT(co), co łatwo sprawdzić na podstawie twierdzenia granicznego z p. 12.2. Zależności (16.122) i (16.128) noszą nazwę wzorów Kroniga-Kramersa. W prosty sposób można wykazać, że odpowiedź ustalona układu na wymuszenie
A cos co01 ma postać
r,u(f) = Re[4T(joj0)ej''M],
przy czym /JT(joj0)ejtu°' jest odpowiedzią ustaloną układu na wymuszenie /4ej<“0',
wobec tego
rt.M(t) = /4[l/(cu0)coscu0f—K(co0)sinaj0t]. (16.129)
Odpowiedź przejściowa układu na wymuszenie A cos co0t wynosi
2/4 * coV(co) cos cot
rcp(t) = rc(t) — rcu(t) =--J-2-2—dcu + A V(a>0) sin co0t,
Tl q CO o CO
skąd po podstawieniu wzoru (16.124), otrzymuje się
(16.130)
2/4 * [co0 F(co0)—coK(co)] coscot
fcp(t) = j 2 2 dcO,
Jt o ca^-co1
przy czym funkcja podcałkowa jest ciągła w punkcie co = co0, jeżeli funkcja K(co) jest różniczkowalna.
Wyrażenie (16.130) pozwala obliczyć odpowiedź przejściową układu na wymuszenie /4cosco0f, gdy znana jest część urojona transmitancji widmowej. Odpowiedź ustaloną układu można obliczyć za pomocą wzoru (16.129). Odpowiedź układu można natomiast otrzymać jako sumę odpowiedzi ustalonej i przejściowej.
Za pomocą wyprowadzonych w p. 16.12.2 i 16.12.3 wzorów można również obliczyć odpowiedź układu na wymuszenie A sin(co0 r + cp). Wykorzystując wyrażenie
sin(co0 t + cp) = cos cp sin co0t + sin cp cos co0t,
widzimy (zgodnie z zasadą superpozycji), że odpowiedzią układu na wymuszenie A sin(a)0 t + cp) jest rv(r) cos cp + rc(t) sin cp.
Otrzymane wzory całkowe umożliwiają obliczanie za pomocą metod numerycznych odpowiedzi złożonych układów przy wymuszeniu sinusoidalnym .
17. UKŁADY WIELOZACISKOWE
17.1. Wstęp
Przedmiotem rozważań w tym rozdziale będą układy wielozaciskowe o N zaciskach. Najprostszymi przykładami takich układów są dwójniki (N = 2) oraz czwór-niki (jV = 4), które były omawiane poprzednio. Obecnie omówimy ogólne własności układów wielozaciskowych.
Dowolny układ o N zaciskach nazywamy wielobiegunnikiem. Wielobiegunnik mający n wejść nazywamy n-wrotnikiem. Zgodnie z tym określeniem, czwórnik można nazwać dwuwrotnikiem.
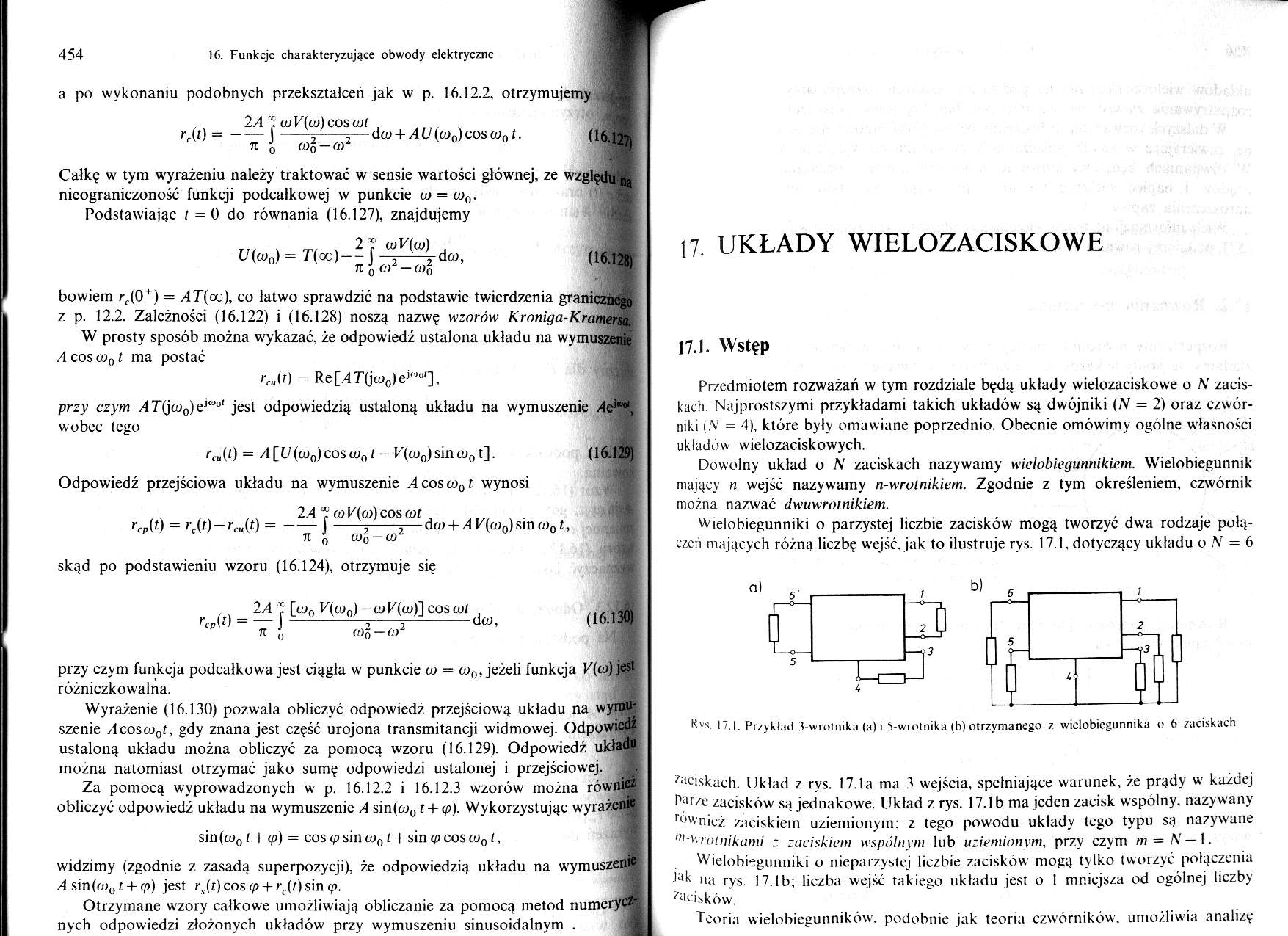
Wielobiegunniki o parzystej liczbie zacisków mogą tworzyć dwa rodzaje połączeń mających różną liczbę wejść, jak to ilustruje rys. 17.1. dotyczący układu o .V = 6
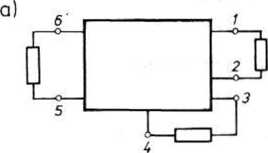
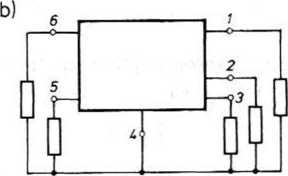
Rys. 17.1. Przykład 3-wrotnika (a) i 5-wrotnika (b) otrzymanego z wielobicgunnika o 6 zaciskach zaciskach. Układ z rys. 17.la ma 3 wejścia, spełniające wuirunek, że prądy w każdej parze zacisków są jednakowe. Układ z rys. 17.Ib ma jeden zacisk wspólny, nazywany również zaciskiem uziemionym: z tego powodu układy tego typu są nazywane m-wrotnikami z zaciskiem wspólnym lub uziemionym, przy czym m = N — \.
Wielobiegunniki o nieparzystej liczbie zacisków mogą tylko tworzyć połączenia jak na rys. 17.Ib; liczba wejść takiego układu jest o 1 mniejsza od ogólnej liczby zacisków.
Teoria wielobicgunników. podobnie jak teoria czwórników. umożliwia analizę
Wyszukiwarka
Podobne podstrony:
224 (26) 448 16. Funkcje charakteryzujące obwody elektryczne Po podstawieniu — t na miejsce t, znajd
220 (24) 440 16. Funkcje charakteryzujące obwody elektryczne jest amplitudą odpowiedzi ustalonej ukł
221 (23) 442 16. Funkcje charakteryzujące obwody elektryczne rzeczywiste i części urojone. Wobec teg
222 (34) 444 16. Funkcje charakteryzujące obwody elektryczne amplitudowo-fazowej oznacza się strzałk
223 (26) 446 16. Funkcje charakteryzujące obwody elektryczne przy czym a > 2. jeżeli w półpłaszcz
225 (21) 450 16. Funkcje charakteryzujące obwody elektryczne Wzór (16.111) jest słuszny, gdy granica
226 (24) 452 16. Funkcje charakteryzujące obwody elektryczne bowiem funkcja podcałkowa jest parzysta
25940 str022 (5) 22 I. ELEMENTY TEORII FUNKCJI ZMIENNEJ ZESPOLONEJ Porównując po obu stronach równoś
7. Wytyczne branży elektrycznej Instalację wykonać wg wymogów jak dla pomieszczeń zagrożonych
Zeszyt Cwiczeń FUNKCJI POZNAWCZYCH 1 (22) ĆWICZENIE 16 Dokończ zdanie przypominając sobie wcześniej
12 Obwody elektryczne prądu przemiennego trójfazowego: Wielkości charakterystyczne i ich zależności.
286 (16) 572 572 22. Zastosowanie przekształcenia Fouriera Rys. 22.6. Impuls trójkątny Funkcję z rys
12 Obwody elektryczne prądu przemiennego trójfazowego: Wielkości charakterystyczne i ich zależności.
16. KOSZTY WYTWARZANIA ENERGII ELEKTRYCZNEJ Równanie (16.22) jest równaniem kierunkowym prostej łącz
Elektronika I rok zestaw 16 (funkcja Gaussa). L Dana jest funkcja falowa w postaci: y(x) =
Img00207 211 4.22. W przypadku dielektryków niepolarnych, charakteryzujących się tylko polaryzacją e
więcej podobnych podstron