253 (44)
r DY ROZWIĄZYWANIA WIELKICH UKŁADÓW LINIOWYCH... io.4/253
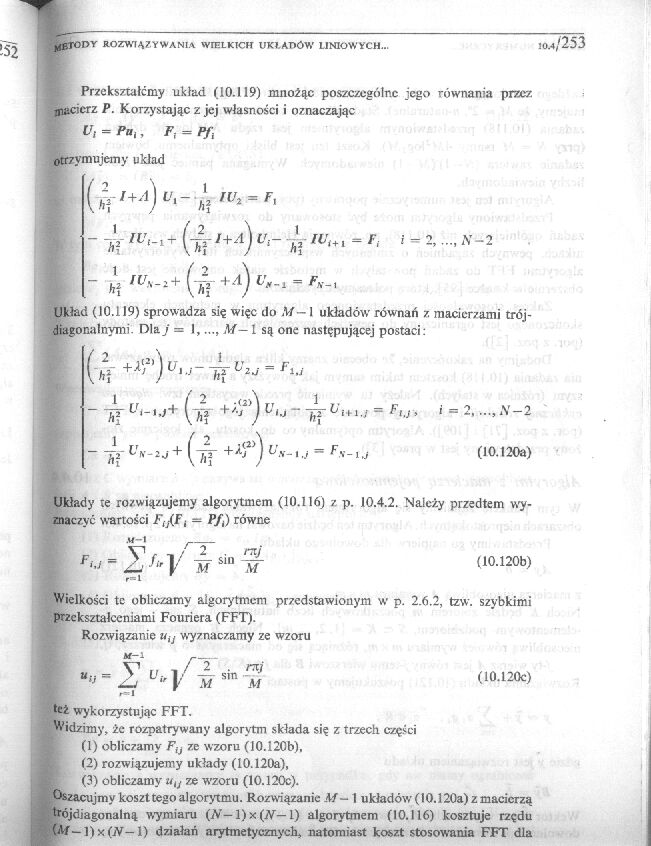
Przekształćmy układ (10.119) mnożąc poszczególne jego równania przez pacierz P. Korzystając z jej własności i oznaczając
Vt = Pa ,, F; = Pf \ mujemy układ
- -^2 ( ) V - ~jj2 ^<+1 = * = -»•••, *v -2
r
Układ (10.119) sprowadza się więc do M- 1 układów równań z macierzami trój-diagonalnymi. Dla / = I,..., M— 1 są one następującej postaci:
—kV-^+{i*^)V»-SrV^-F»:
frlT Ł'k-2J+ } Ł.V-U = Fv-,J
i = 2, iY—2 (10.120a)
Układy te rozwiązujemy algorytmem (10.116) z p. 10.4.2. Należy przedtem wyznaczyć wartości f^/F, = ?/,) równe
(10.120b)
r~ 1
Wielkości tc obliczamy algorytmem przedstawionym w p. 2.6.2, tzw. szybkimi przekształceniami Fouriera (FFT).
Rozwiązanie utJ wyznaczamy ze wzoru
K-l -----
u“ = E L'" ]/ ii sin M (10.120C)
r«l
tc* wykorzystując FFT.
Widzimy, żc rozpatrywany algorytm składa się z trzech części
(1) obliczamy ze wzoru (10.120b),

(2) rozwiązujemy układy (10.120a),
(3) obliczamy utJ ze wzoru (10.120c).
ijmy koszt tego algorytmu. Rozwiązanie Af - I układów (I0.120a) z macierzą ijdiagonalną wymiaru (A — 1) x(Jf— 1) algorytmem (10.116) kosztuje rzędu (Af — ]) x (JV— 1) działań arytmetycznych, natomiast koszt stosowania FFT dla
Wyszukiwarka
Podobne podstrony:
257 (44) ODY ROZWIĄZYWANIA WIELKICH UKŁADÓW LINIOWYCH...iS/257 Zauważmy, że zadania (10.123) i (10.1
259 (39) ODY ROZWIĄZYWANIA WIELKICH UKŁADÓW LINIOWYCH... ,4/259 la przestrzeń elementu skończonego F
261 (41) j/fc-TODY ROZWIĄZYWANIA WIELKICH UKŁADÓW LINIOWYCH...
263 (41) ODY ROZWIĄZYWANIA WIELKICH UKŁADÓW LINIOWYCH...id ą/263 są mniejsze co do modułu od jednośc
267 (40) METODY ROZWIĄZYWANIA WIELKICH UKŁADÓW LINIOWYCH... 10.4/267 Dowód łicrówność lewostronna wy
269 (42) ; METODY ROZWIĄZYWANIA WIELKICH UKŁADÓW LINIOWYCH... 10.4/269 krok iteracji .sprowadza się
251 (44) .0.4/251 ODY ROZWIĄZYWANIA WirLKJCII UKŁADÓW LINIOWYCH... osując eliminację Gaussa dochodzi
255 (45) y,{ETODY ROZWIĄZYWANIA WIELKICH LKŁADÓW LINIOWYCH... ,0.4/255 eCl j wektory gt. Podstawiają
080 081 80 Anna Kamińska. Artur Gas Rozdział 4: Stabilność układów liniowych8J Aby po zamknięciu ukł
Untitled 44 3. Przybliżone rozwiązywanie równań nieliniowych i ich układów 158 Przypominamy, że licz
img011 (53) 17 nienie algorytmów uwzględniające rzadkość macierzy jest często w przypadku analizy wi
s130 131 130 5. Rozwiązać układy równań liniowych: (a) x — y 4- 2z — 4 2x + y — 3z = 6 ( x - 2y + z
więcej podobnych podstron