82422
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 15
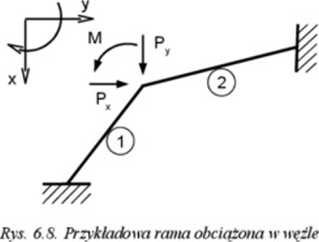
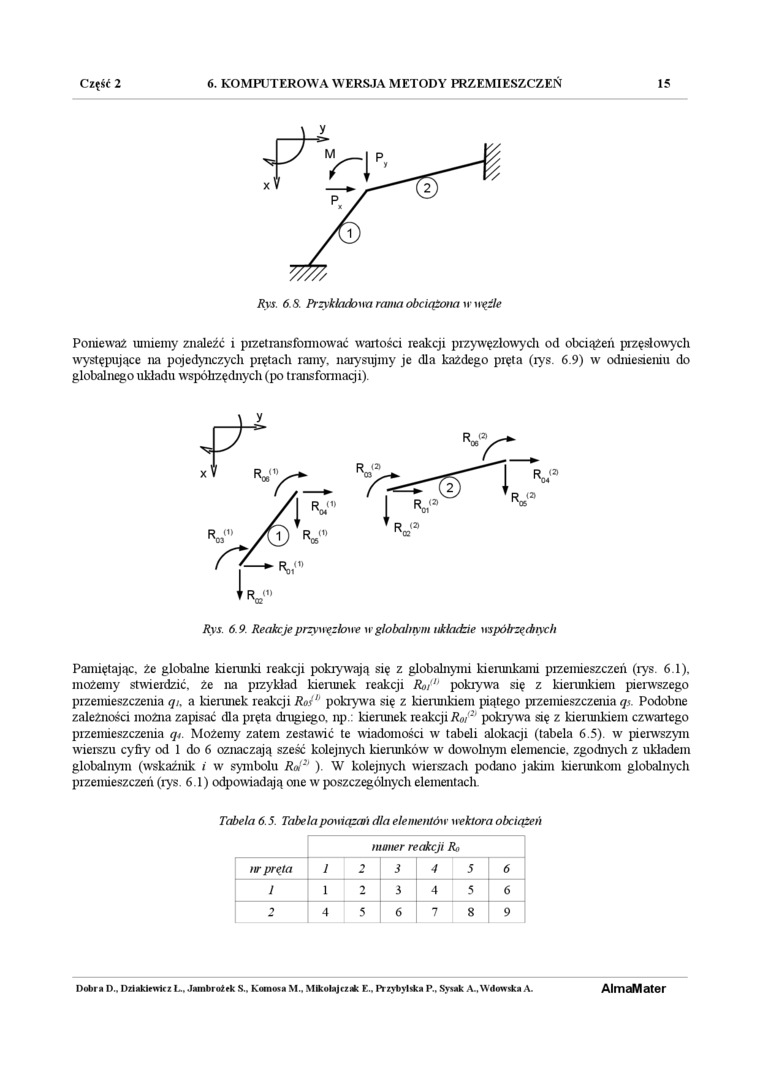
Ponieważ luniemy znaleźć i przetransformować włości reakcji pizywęzłowych od obciążeń przęsłowych występujące na pojedynczych piętach ramy, narysujmy je dla każdego pręta (rys. 6.9) w odniesieniu do globalnego układu współrzędnych (po transformacji).
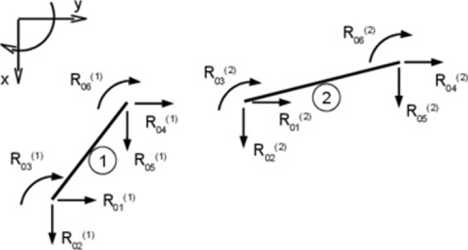
Rys. 6.9. Reakcje przywęztowe w globalnym układne współrzędnych
Pamiętając, że globalne kierunki reakcji pokrywają się z globalnymi kierunkami pizemieszczeń (rys. 6.1), możemy stwierdzić, że na przykład kierunek reakcji Rołh pokiywa się z kierunkiem pierwszego przemieszczenia qi. a kienmek reakcji Roś1' pokrywa się z kierunkiem piątego przemieszczenia q.<. Podobne zależności można zapisać dla pręta drugiego, np.: kienmek reakcji Rot'2, pokrywa się z kierunkiem czwartego przemieszczenia q* Możemy zatem zestawić te wiadomości w tabeli alokacji (tabela 6.5). w pierwszym wierszu cyfiy od 1 do 6 oznaczają sześć kolejnych kieiunków w dowolnym elemencie, zgodnych z układem globalnym (wskaźnik i w symbolu Reih ). W kolejnych wierszach podano jakim kienmkom globalnych przemieszczeń (rys. 6.1) odpowiadają one w poszczególnych elementach.
Tabela 6.5. Tabela powiązali dla elementów wektora obciążeń
|
niuner reakcji R* | |||||||
|
nr pręta |
1 |
2 |
3 |
4 |
5 |
6 | |
|
1 |
1 |
2 |
3 |
4 |
5 |
6 | |
|
i |
4 |
5 |
6 |
7 |
8 |
9 | |
AlmaMater
Dobra D.. Dztakicwlcz L.. Jatnbrożrk S.. Ko«n<na M.. Mikołajczak E„ Przvfoyl«ka P., Syrak A , Wdowdca A.
Wyszukiwarka
Podobne podstrony:
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 10 W v>iiiku działania nierównomiernie
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 8 Tabela 6.1. Wartości reakcji Rń od obciąże
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 21 Część 2 6. KOMPUTEROWA WERSJA METODY
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 2 rl, r 2 rn r,4 • •
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 5 Podstawiając związki (6.7) otrzymamy popra
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 6 czyli odpowiednio: Rl =0 lub R6 =0 Należ
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 22 Przy wykonywaniu kontroli kinematyczne) w
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 14 Transformacja pozwala nam uzyskać składow
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 19 Obecność podpory sprężystej w węźle ramy
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 7 6.4. Wektor sil przy węzłowych Na wektor s
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 12 Ł l /
Część 2 I. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 13 ^I
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 3 Na rys. 1.5 symbol oznacza obrót cięciw
Część 2 I. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 2 Rys
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 7 które następnie całkujemy IEJ
Część 2 16. ZADANIA POWTÓRKA 13 Przyjmujemy układ podstawowy metody przemieszczeń. Połączenie
więcej podobnych podstron