82477
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 19
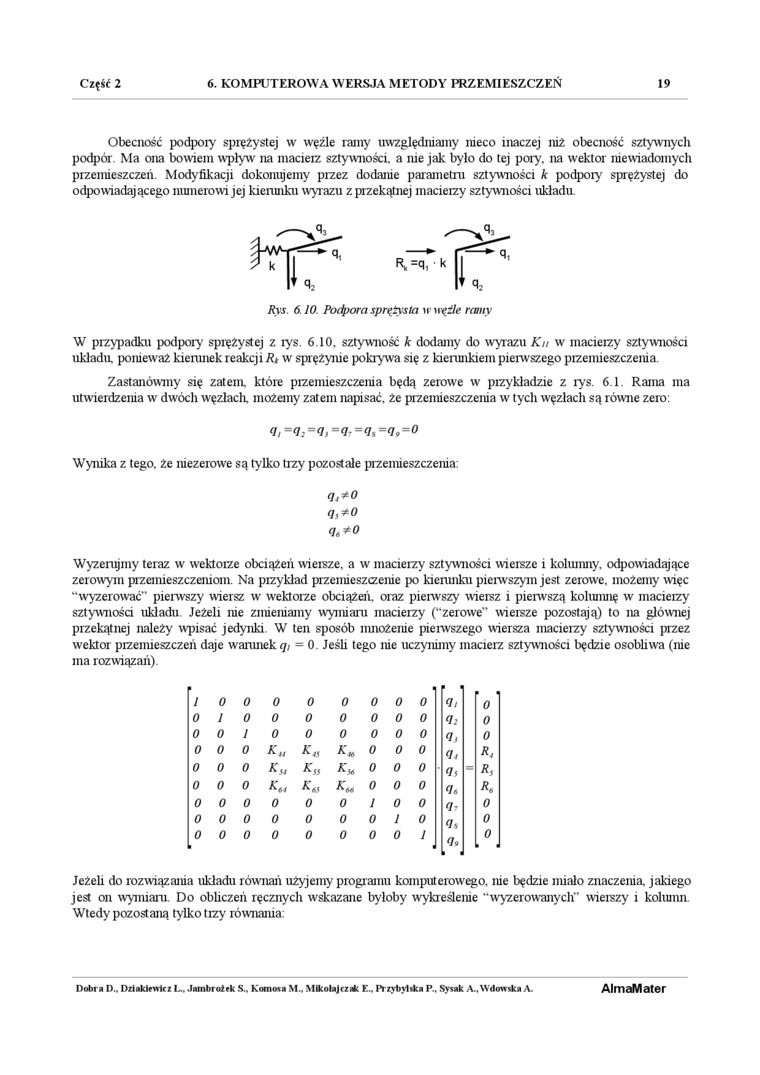
Obecność podpory sprężystej w węźle ramy uwzględniamy nieco inaczej niż obecność sztywnych podpór. Ma ona bowiem wpływ na macieiz sztywności, a nie jak było do tej pory. na wektor niewiadomych przemieszczeń. Modyfikacji dokonujemy przez dodanie parametru sztywności k podpory sprężystej do odpowiadającego numerowi jej kierunku wyrazu z przekątnej macierzy sztywności układu
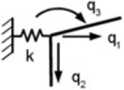

R*=q,-
Rys. 6. JO. Podpora sprężysta u uężle ramy
W przypadku podpory sprężystej z rys. 6.10, sztywność k dodamy do wyrazu Kn w macierzy sztywności układu, ponieważ kierunek reakcji Rt w sprężynie pokrywa się z kierunkiem pierwszego przemieszczenia.
Zastanówmy się zatem, które przemieszczenia będą zerowe w przykładzie z rys. 6.1. Rama ma utwierdzenia w dwóch węzłacli, możemy zatem napisać, że przemieszczenia w tycli węzłach są równe zero:
(1, =<J2=<Jj=<J=<Ji=<J9=0
Wynika z tego. że niezerowe są tylko trzy pozostałe przemieszczenia:
<1**0 <Is *0 <1**0
Wyzerujmy teraz w wektorze obciążeń wiersze, a w macierzy sztywności wiersze i kolumny, odpowiadające zerowym przemieszczeniom. Na przykład przemieszczenie po kierunku pierwszym jest zerowe, możemy więc "wyzerować" pierwszy wiersz w wektorze obciążeń, oraz pierwszy wiersz i pierwszą koliuruię w macierzy sztywności układu Jeżeli nie zmieniamy wymiaru macierzy ("zerowe" wiersze pozostają) to na głównej przekątnej należy wpisać jedynki. W ten sposób mnożenie pierwszego wiersza macierzy sztywności przez wektor przermeszczeń daje wmunek qt = 0. Jeśli tego nie uczynimy macierz sztywności będzie osobliwa (nie ma r ozwiązań).
|
I |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
<1 / |
0 | ||
|
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
<1: |
0 | ||
|
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
<Ii |
0 | ||
|
0 |
0 |
0 |
Ku |
K„ |
0 |
0 |
0 |
<1, |
R* | |||
|
0 |
0 |
0 |
K» |
Ku |
Ka |
0 |
0 |
0 |
<Ii |
= |
R* | |
|
0 |
0 |
0 |
K„ |
Ka |
km |
0 |
0 |
0 |
<16 |
Re | ||
|
0 |
0 |
0 |
0 |
0 |
0 |
I |
0 |
0 |
<!• |
0 | ||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
<ls |
0 | ||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
<1* |
0 |
Jeżeli do rozwiązania układu równań użyjemy programu komputerowego, nie będzie miało znaczenia, jakiego jest on wymiaru. Do obliczeń ręcznych wfskazane byłoby wykreślenie "wyzerowanych" wierszy i kolumn Wtedy pozostaną tylko trzy równania:
AlmaMater
Dobra D.. Dztakicwlcz L.. Jatnbrożrk S.. Ko«n<na M.. Mikołajczak E„ Przybyl«ka P., Syrak A.. Wdowdca A.
Wyszukiwarka
Podobne podstrony:
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 15 Ponieważ luniemy znaleźć i
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 10 W v>iiiku działania nierównomiernie
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 8 Tabela 6.1. Wartości reakcji Rń od obciąże
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 21 Część 2 6. KOMPUTEROWA WERSJA METODY
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 2 rl, r 2 rn r,4 • •
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 5 Podstawiając związki (6.7) otrzymamy popra
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 6 czyli odpowiednio: Rl =0 lub R6 =0 Należ
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 22 Przy wykonywaniu kontroli kinematyczne) w
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 14 Transformacja pozwala nam uzyskać składow
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 7 6.4. Wektor sil przy węzłowych Na wektor s
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 12 Ł l /
Część 2 I. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 13 ^I
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 3 Na rys. 1.5 symbol oznacza obrót cięciw
Część 2 I. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 2 Rys
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 7 które następnie całkujemy IEJ
Część 1 1. WIADOMOŚCI WSTĘPNE. PRACA SIL NA PRZEMIESZCZENIACH 5 Rys. I.7. Schemat podpory teleskopow
Część 2 16. ZADANIA POWTÓRKA 13 Przyjmujemy układ podstawowy metody przemieszczeń. Połączenie
Metody i kryteria oceny: • Obecność na zajęciach praktycznych / praktykach zawodow
więcej podobnych podstron