82479
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 12
|
Ł\ | ||
|
l |
/ ** | |
|
0 |
0 | |
|
0 |
0 | |
|
-K-i |
KiAx | |
|
1 | ||
|
0 |
0 | |
|
0 |
0 » 1 |
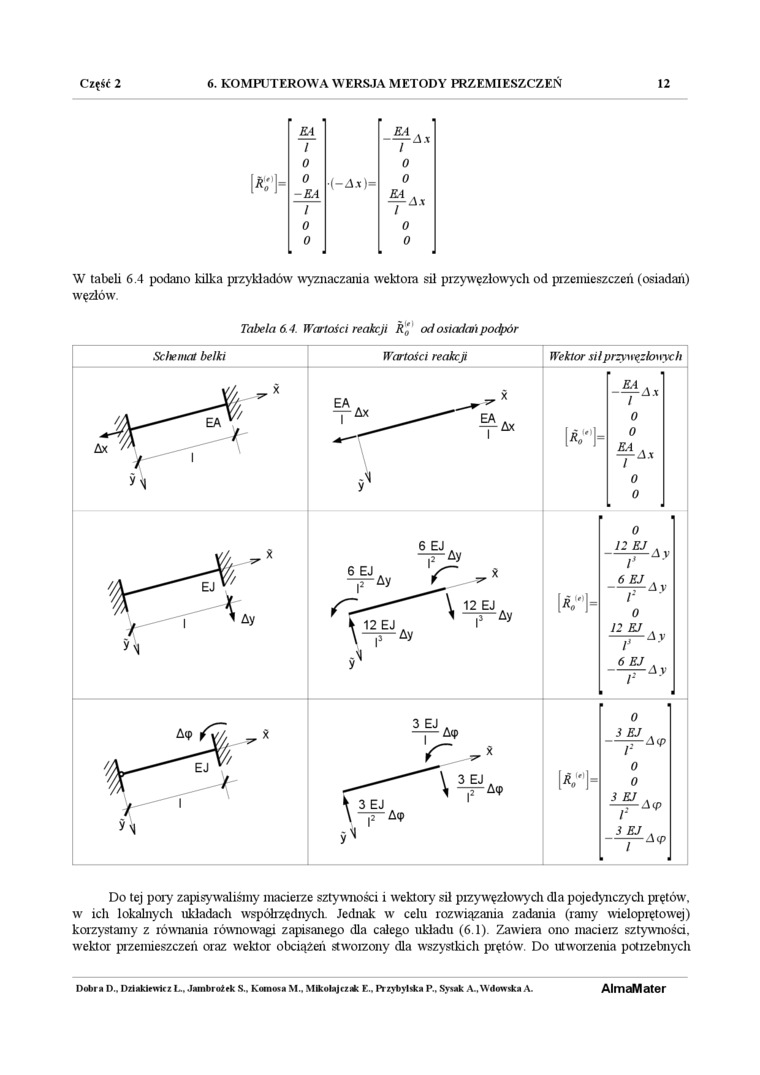
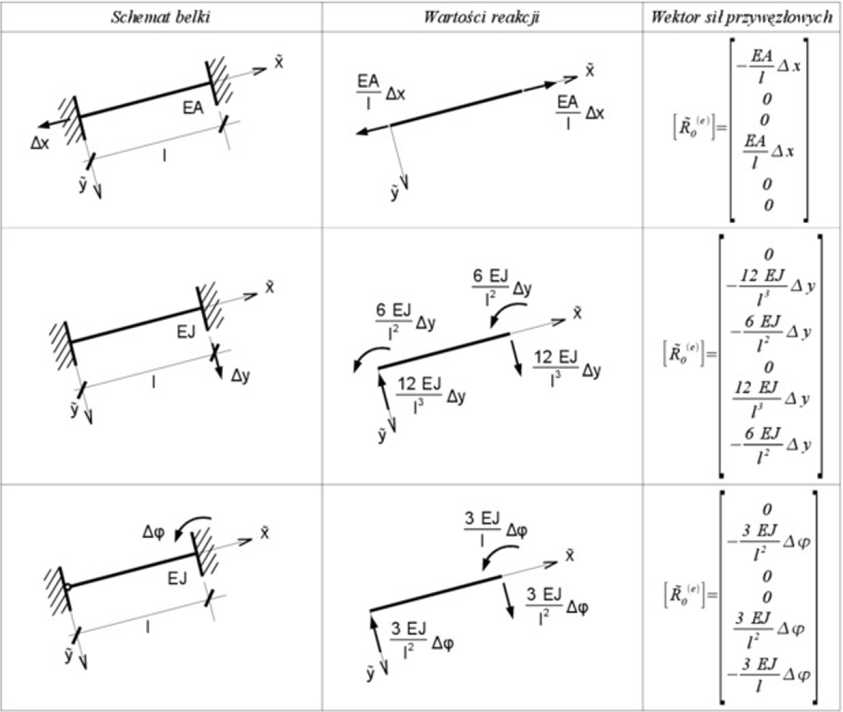
W tabeli 6.4 podano kilka przykładów wyznaczania wektora sił przywęzłowych od przemieszczeń (osiadali) węzłów.
Tabela 6 i Wartości reakcji k '0 od osiadali podpór
Do tej pory zapisywaliśmy macierze sztywności i wektory sil pizywęzlowych dla pojedynczych prętów, w ich lokalnych układach współrzędnych. Jednak w celu rozwiązania zadania (ramy wieloprętowęj) korzystamy z równania równowagi zapisanego dla całego układu (6.1). Zawiera ono macieiz sztywności, wektor przemieszczeń oraz wektor obciążeń stwoizony dla wszystkich prętów. Do utworzenia potizebnych
AlmaMater
Dobra D.. Dztakicwlcz L.. Jatnbrożrk S.. Ko«n<na M.. Mikołajczak E„ Przvfoyl«ka P., Syrak A., Wdowdca A.
Wyszukiwarka
Podobne podstrony:
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 15 Ponieważ luniemy znaleźć i
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 10 W v>iiiku działania nierównomiernie
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 8 Tabela 6.1. Wartości reakcji Rń od obciąże
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 21 Część 2 6. KOMPUTEROWA WERSJA METODY
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 2 rl, r 2 rn r,4 • •
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 5 Podstawiając związki (6.7) otrzymamy popra
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 6 czyli odpowiednio: Rl =0 lub R6 =0 Należ
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 22 Przy wykonywaniu kontroli kinematyczne) w
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 14 Transformacja pozwala nam uzyskać składow
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 19 Obecność podpory sprężystej w węźle ramy
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 7 6.4. Wektor sil przy węzłowych Na wektor s
Część 2 I. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 13 ^I
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 3 Na rys. 1.5 symbol oznacza obrót cięciw
Część 2 I. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 2 Rys
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 7 które następnie całkujemy IEJ
Część 2 16. ZADANIA POWTÓRKA 13 Przyjmujemy układ podstawowy metody przemieszczeń. Połączenie
więcej podobnych podstron