82426
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 2
|
rl, |
r'2 |
rn |
r,4 • |
• ',9 |
|
r2/ |
Tii |
r:t |
r24 • |
r 29 |
|
r,t |
r*: |
r„ . |
• r>9 | |
|
r9l |
r92 |
r9S |
r9t |
r 99 |
Niewiadome, oznaczane dotąd Z to nic innego jak szukane przemieszczenia węzłów <7,. które tworzą macierz niewiadomych przemieszczeń węzłowych [</]:
<1,

<79
Współczynniki» również będą tworzyły macierz - tak zwany wektor obciążeń [/*„]:

Można zatem cały układ równali kanonicznych zapisać w postaci równania macieizowęgo: lub ogólniej dla dowohiego układu (w to liczba niezależnych przemieszczeń węzłowych)
I^U*kLx/=(^U (6-1)
Rozwiązanie równania (6.1) pozwoli nam uzyskać wynik, tak jak w zadaniu klasycznym. Aby jednak móc przystąpić do obliczeń, należy utworzyć wszystkie podzebne macierze. Każda z nich powstaje w wyniku agregacji odpowiednich macierzy elementowych (zapisanych dla pojedynczych prętów).
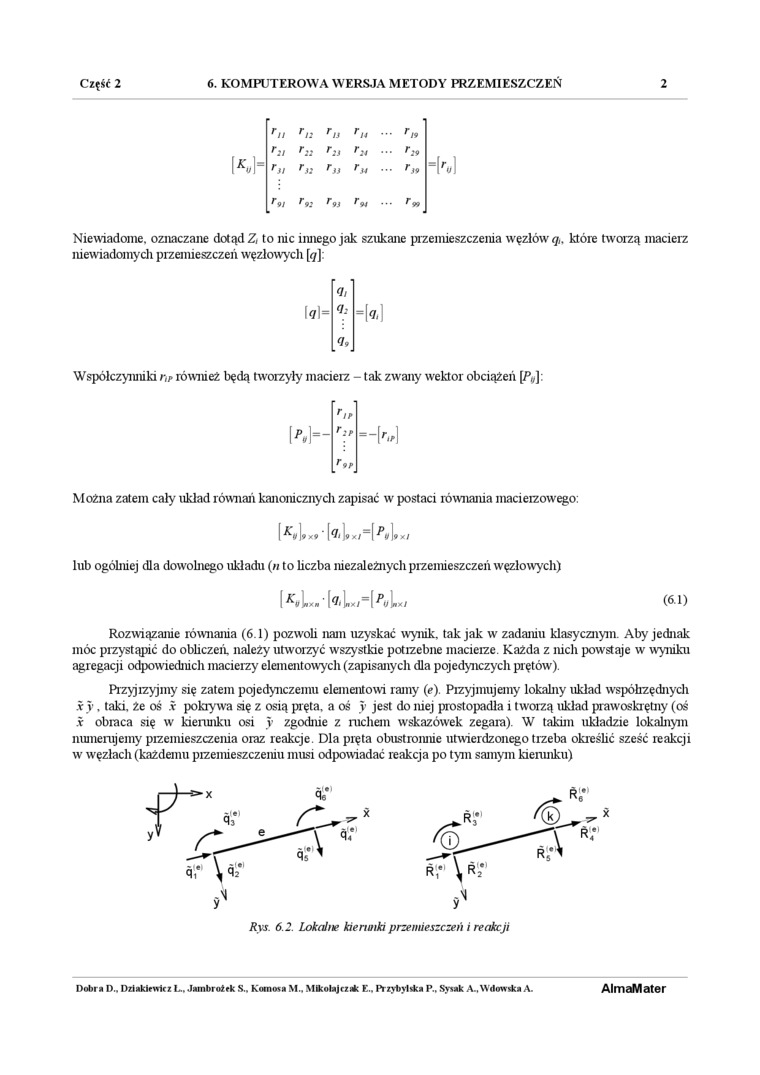
Przyjrzyjmy się zatem pojedynczemu elementowi ramy (<»). Przyjmujemy lokalny układ współrzędnych xy. taki. że oś x pokrywa się z osią pięta, a oś y jest do mej prostopadła i tworzą układ prawoskrętny (oś .v obraca się w kierunku osi y zgodnie z ruchem wskazówek zegaia). W takim układzie lokalnym numerujemy przemieszczema oraz reakcje. Dla pręta obustronnie utwierdzonego trzeba określić sześć reakcji w węzłach (każdemu przemieszczeniu musi odpowiadać reakcja po tym samym kierunku)
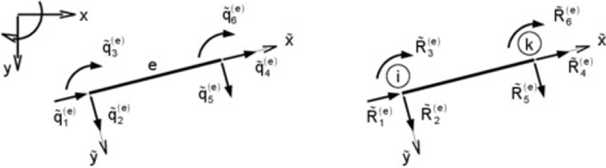
Rys. 6.2. Lokalne kie notki przemieszczeń i reakcji
AlmaMater
Dobra D.. Dztakicwlcz L., Jatnbrożrk S.. Ko«n<na M„ Mikołajczak Z.. Przybylfka P., Syrak A , Wdowdca A.
Wyszukiwarka
Podobne podstrony:
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 8 Tabela 6.1. Wartości reakcji Rń od obciąże
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 6 czyli odpowiednio: Rl =0 lub R6 =0 Należ
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 15 Ponieważ luniemy znaleźć i
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 10 W v>iiiku działania nierównomiernie
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 21 Część 2 6. KOMPUTEROWA WERSJA METODY
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 5 Podstawiając związki (6.7) otrzymamy popra
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 22 Przy wykonywaniu kontroli kinematyczne) w
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 14 Transformacja pozwala nam uzyskać składow
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 19 Obecność podpory sprężystej w węźle ramy
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 7 6.4. Wektor sil przy węzłowych Na wektor s
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 12 Ł l /
Część 2 I. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 13 ^I
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 3 Na rys. 1.5 symbol oznacza obrót cięciw
Część 2 I. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 2 Rys
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 7 które następnie całkujemy IEJ
Część 2 16. ZADANIA POWTÓRKA 13 Przyjmujemy układ podstawowy metody przemieszczeń. Połączenie
Zdjęcie0123 IM. ł*r/«M«w afedfcta* w*«***r»«l/rn.r brułl.. w triUarM prmUifhi.it-I» / < ■// IMm*
Zdjęcie0123 IM. ł*r/«M«w afedfcta* w*«***r»«l/rn.r brułl.. w triUarM prmUifhi.it-I» / < ■// IMm*
więcej podobnych podstron