82490
Część 2 16. ZADANIA POWTÓRKA 13
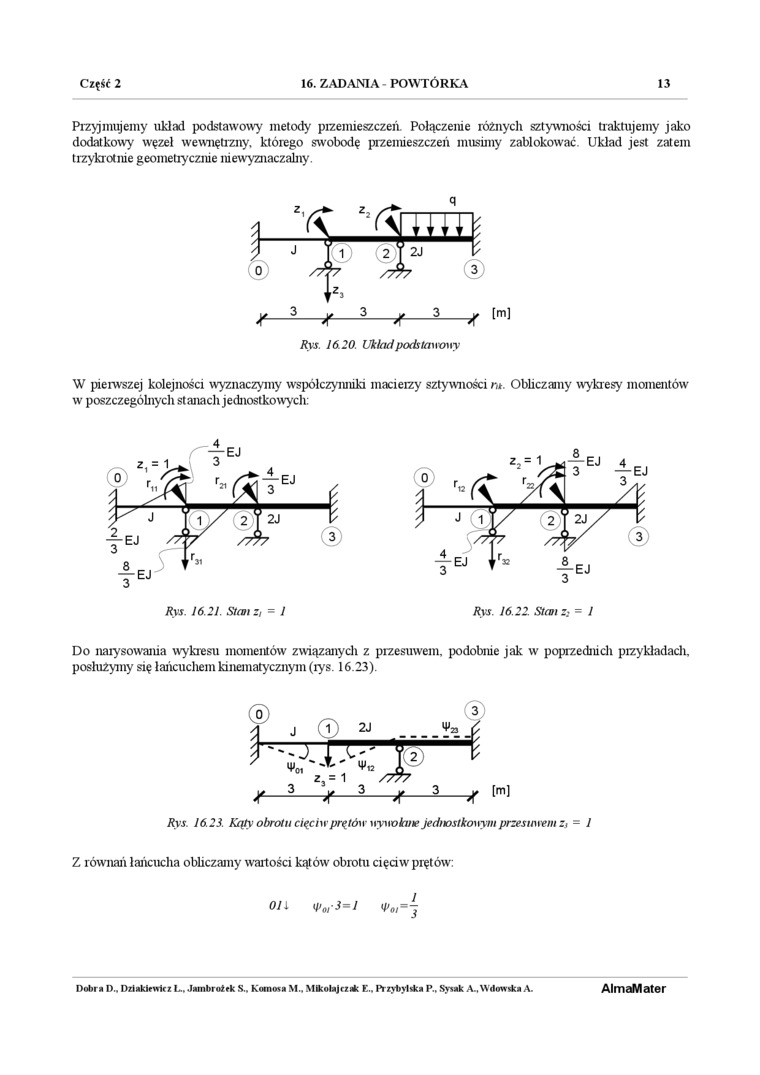
Przyjmujemy układ podstawowy metody przemieszczeń. Połączenie różnych sztywności traktujemy jako dodatkowy- węzeł wewnętrzny, którego swobodę przemieszczeń musimy zablokować. Układ jest zatem trzykrotnie geometrycznie niewyznaczalny.
Część 2 16. ZADANIA POWTÓRKA 13
Rys. 16.20. Układ podstawmy
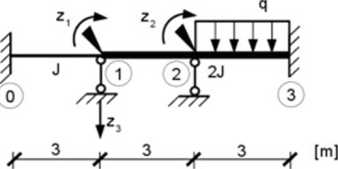
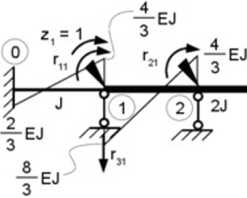
W pierwszej kolejności wyznaczymy wspólczyiuiiki macieizy sztywności rut. Obliczamy wykresy momentów w poszczególnych stanach jednostkowych;
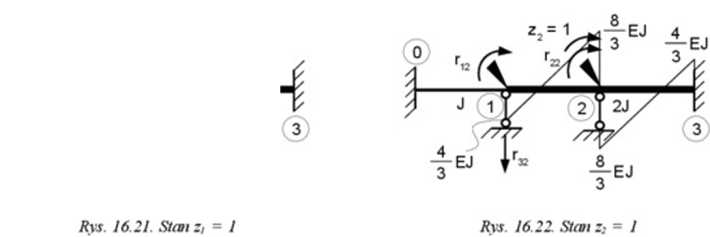
Do narysow^iia wykresu momentów związany cli z przesuwem, podobnie jak w poprzednich przykładach, posłużymy się łańcuchem kinematycznym (jys. 16.23).
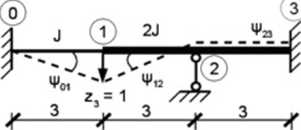
[m]
Rys. 16.23. Kąty obrotu cięciw prętów- wywołane Jednostkowym przesuwem zs = 1
Z równali łańcucha obliczamy wartości kątów obrotu cięciw prętów:
Oli *ł>0,3=l tp0,=-j
AlmaMater
Dobra D.. Dztakicwlcz L.. Jatnbrożrk S.. Ko«n<na M„ Mikołajczak E„ Przyfoylłka P., Syrak A , Wdowdca A.
Wyszukiwarka
Podobne podstrony:
Część 2 16. ZADANIA POWTÓRKA 2 Rys. 16.3. Wykres momentów ir układzie podstauouym y\vkun obro
Część 2 16. ZADANIA POWTÓRKA 32 Teraz możemy utwoizyć układ równali opisujący warunki
Część 2 16. ZADANIA - POWTÓRKA 16 Zadanie 4 Korzystając z możliwych uproszczeń rozwiązać ramę z
Część 2 16. ZADANIA POWTÓRKA 8 Do wyznaczenia współczyimików związanych z przesuwami posłużą
Część 2 16. ZADANIA POWTÓRKA 17 Aby wyznaczyć wartości współczynników związanych z przesuwem po
Część 2 16. ZADANIA POWTÓRKA 22 Zapisując równanie równowagi monieniów w węźle 1 otrzymamy
Część 2 16. ZADANIA POWTÓRKA 29 Zadanie rozwiążemy korzystając z zasady
Część 2 16. ZADANIA POWTÓRKA 35 i 2m Rozwiązanie równania różniczkowego (16.111)
Część 2 16. ZADANIA POWTÓRKA 43 B cosal + D cosha 1=0 - Bsinal+Dsinhal=0 jest niezerowe (nietry
Część 2 16. ZADANIA - POWTÓRKA 116.16. ZADANIA - POWTÓRKA Zadanie 1 Wykorzystując metodę
Część 2 16. ZADANIA - POWTÓRKA 7 Zadanie 2 Wyznaczyć wartości współczynników m i nr dla ramy
Część 2 16. ZADANIA - POWTÓRKA 34 vi Ca+C//+CJ>.«nA/+CJ>car
2 (165) 6 Dla ramy jak na rysunku przyjęto układ podstawowy metody przemieszczeń. Narysować pla
Część 1 15. ZADANIA - POWTÓRKA 16 Dla #=/ i P=l. Me{P)=-Ą{*) 1,125 P=-{-l,125
Część 1 15. ZADANIA POWTÓRKA 20 Rys. 15.2S Luk kolony statycznie nie wyznać żalny Układ jest
Untitled Scanned 40 (4) Rama jest dwukrotnie statycznie niewyznaczalna. Przyjmiemy układ podstawowy
więcej podobnych podstron