82475
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 14
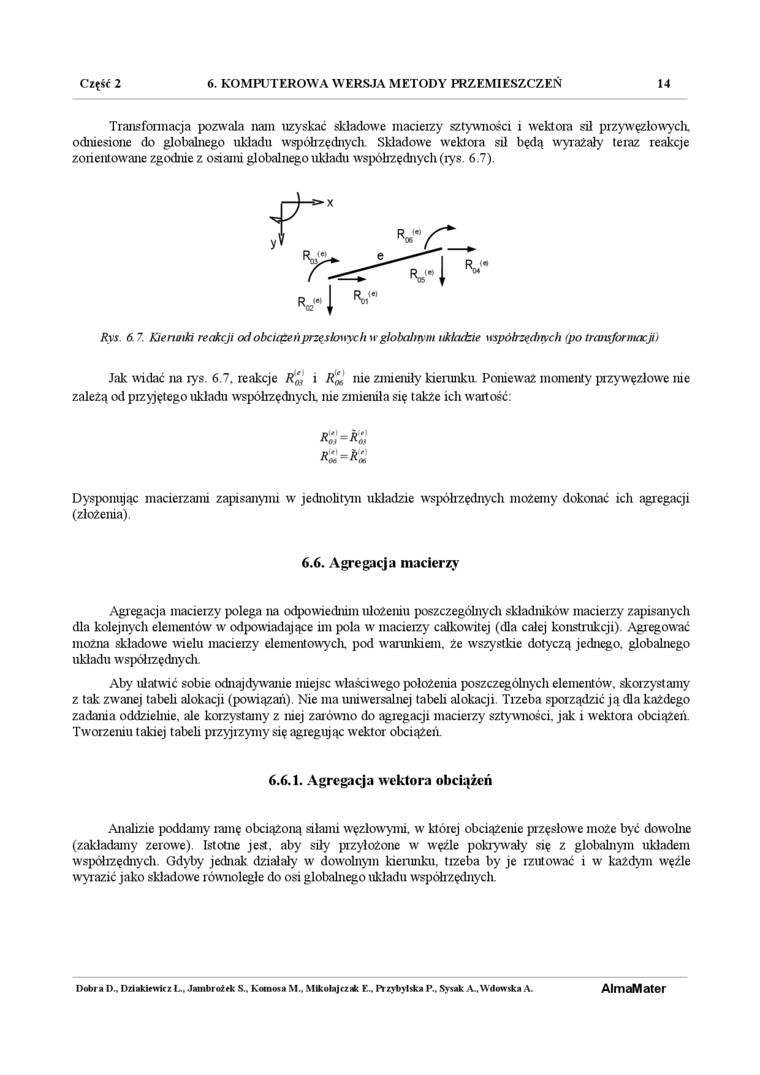
Transformacja pozwala nam uzyskać składowe macierzy sztywności i wektora sil przywęzłowych. odniesione do globalnego układu współrzędnych. Składowe wektora sił będą wyrażały teraz reakcje zorientowane zgodnie z osiami globalnego układu współrzędnych (rys. 6 .7).
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 14
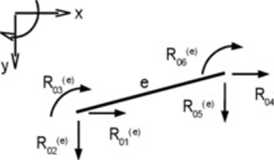
Rys. d 7. Kierunki reakcji od obciążeńprzęsłowych ir globalnym układzie współrzędnych (po transformacji/
Jak widać na rys. 6.7, reakcje R'0f i R1^ nie zmieniły kierunku. Ponieważ momenty przy węzłowe nie zależą od pizyjętego układu współrzędnych, nie zmieniła się także icli wartość:
R<*. =&(r,
Dysponując macierzami zapisanymi w jednolitym układzie współrzędnych możemy dokonać iclr agregacji (złożenia).
6.6. Agregacja macierzy
Agregacja macierzy polega na odpowiednim ułożeniu poszczególnych składników' macierzy zapisanych dla kolejnych elementów w odpowiadające im pola w macierzy całkowitej (dla całej konstrukcji). Agregować można składowe wielu macieizy elementowych pod wraiiuikiem. że wszystkie dotyczą jednego, globalnego układu współrzędnych.
Aby ułatwić sobie odnajdywanie miejsc właściwego położenia poszczególnych elementów', skorzystamy z tak zwfanej tabeli alokacji (powiązań). Nie ma uniwersalnej tabeli alokacji. Trzeba sporządzić ją dla każdego zadania oddzielnie, ale korzystamy z niej zarówno do agregacji macierzy sztywności, jak i wektora obciążeń. Tworzeniu takiej tabeli przyjrzymy się agregując wektor obciążeń.
6.6.1. Agregacja wektora obciążeń
Analizie poddamy ramę obciążoną silanu węzłowymi, w której obciążenie przęsłowre może być dowolne (zakładamy zerowa). Istotne jest. aby siły przyłożone w węźle pokrywały się z globalnym układem współrzędny cli. Gdyby jednak działały w dowolnym kierunku, trzeba by je rzutować i w każdym w-ężle wyr azić jako składowa równoległe do osi globalnego układu współrzędnych.
AlmaMater
Dobra D.. Dztakicwlcz L.. Jatnbrożrk S.. Ko«n<na M.. Mikołajczak E„ Przybyl«ka P., Syrak A., Wdowdca A.
Wyszukiwarka
Podobne podstrony:
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 15 Ponieważ luniemy znaleźć i
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 10 W v>iiiku działania nierównomiernie
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 8 Tabela 6.1. Wartości reakcji Rń od obciąże
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 21 Część 2 6. KOMPUTEROWA WERSJA METODY
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 2 rl, r 2 rn r,4 • •
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 5 Podstawiając związki (6.7) otrzymamy popra
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 6 czyli odpowiednio: Rl =0 lub R6 =0 Należ
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 22 Przy wykonywaniu kontroli kinematyczne) w
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 19 Obecność podpory sprężystej w węźle ramy
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 7 6.4. Wektor sil przy węzłowych Na wektor s
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 12 Ł l /
Część 2 I. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 13 ^I
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 3 Na rys. 1.5 symbol oznacza obrót cięciw
Część 2 I. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 2 Rys
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 7 które następnie całkujemy IEJ
Część 2 16. ZADANIA POWTÓRKA 13 Przyjmujemy układ podstawowy metody przemieszczeń. Połączenie
więcej podobnych podstron