82478
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 7
6.4. Wektor sil przy węzłowych
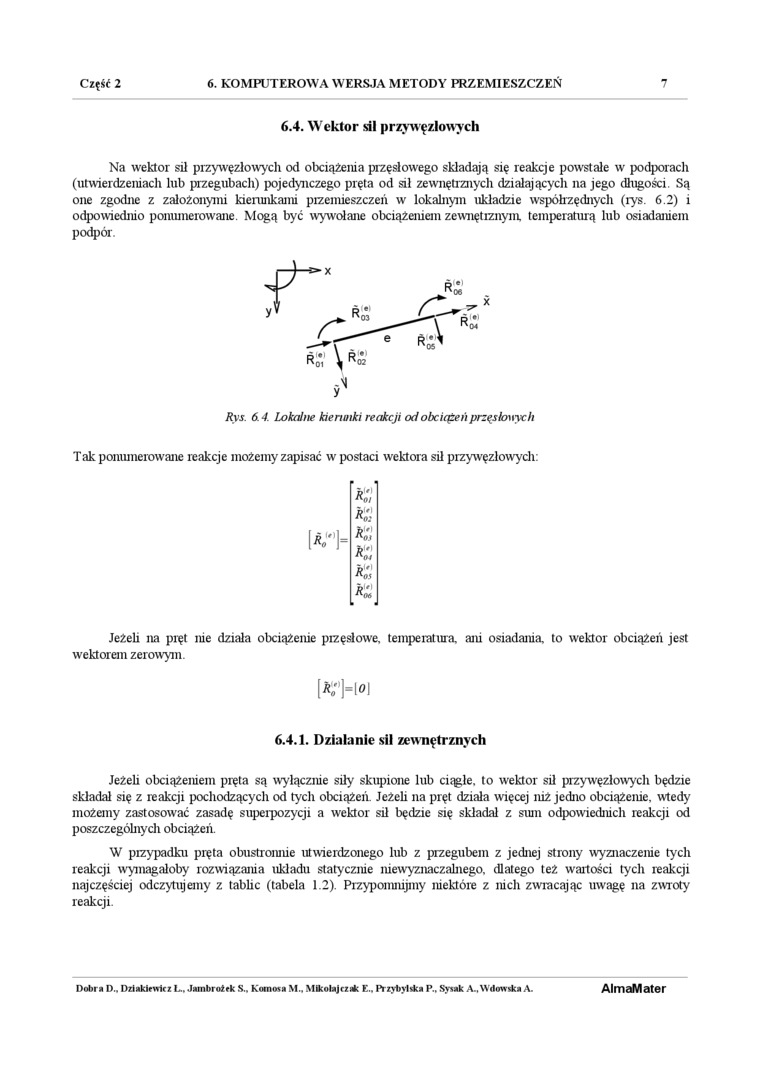
Na wektor sił przywęzlowych od obciążenia przęśl owego składają się reakcje powstałe w podporach (utwierdzeniach lub przegubach) pojedynczego pręta od sił zewnętrznych działających na jego długości. Są one zgodne z założonymi kierunkami przemieszczeń w lokalnym układzie współrzędnych (rys. 6.2) i odpowiednio ponumerowane. Mogą być wywołane obciążemem zewnętrznym, temperaturą lub osiadaniem podpór.
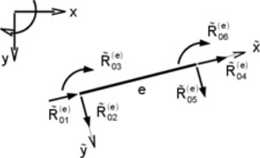
Rys. 6.4. Lokalne kierunki reakcji od obciążeń przęsbmcli
Tak ponumerowane reakcje możemy zapisać w postaci wektor a sił przywęzlowych:

Jeżeli na pręt nie działa obciążenie przęsłowe, temperatura, aru osiadania, to wektor obciążeń jest wektorem zerowym.
Kl-ioi
6.4.1. Działanie sił zewnętrznych
Jeżeli obciążeniem pręta są wyłącznie siły skupione lub ciągle, to wrektor sił przywęzlowych będzie składał się z reakcji pochodzących od tych obciążeń. Jeżeli rra pręt działa więcej niż jedno obciążenie, wtedy możemy zastosować zasadę superpozycji a wektor sił będzie się składał z sum odpowiednich reakcji od poszczególnych obciążeń.
W przypadku pręta obustroruue utwierdzonego lub z przegubem z jednej strony wyznaczerue tych reakcji wymagałoby rozwiązania układu statycznie ruewyznaczalnego, dlatego też wartości tych reakcji najczęściej odczytujemy z tablic (tabela 1.2). Przyponuiijmy niektóre z nich zwracając mvagę na zwroty reakcji.
AlmaMater
Dobra D.. Dztakicwlcz L.. Jatnbroźrk S.. Ko«n<na M.. Mikołajczak E„ Przybyltica P.. Syrak A , Wdowdca A.
Wyszukiwarka
Podobne podstrony:
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 22 Przy wykonywaniu kontroli kinematyczne) w
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 15 Ponieważ luniemy znaleźć i
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 10 W v>iiiku działania nierównomiernie
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 8 Tabela 6.1. Wartości reakcji Rń od obciąże
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 21 Część 2 6. KOMPUTEROWA WERSJA METODY
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 2 rl, r 2 rn r,4 • •
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 5 Podstawiając związki (6.7) otrzymamy popra
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 6 czyli odpowiednio: Rl =0 lub R6 =0 Należ
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 14 Transformacja pozwala nam uzyskać składow
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 19 Obecność podpory sprężystej w węźle ramy
Część 2 6. KOMPUTEROWA WERSJA METODY PRZEMIESZCZEŃ 12 Ł l /
Część 2 I. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 13 ^I
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 3 Na rys. 1.5 symbol oznacza obrót cięciw
Część 2 I. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 2 Rys
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 7 które następnie całkujemy IEJ
Część 2 16. ZADANIA POWTÓRKA 13 Przyjmujemy układ podstawowy metody przemieszczeń. Połączenie
1. Rodzaje utraty danych i metody ich odzyskiwania Praca przy komputerze najczęściej polega na przet
Po przeprowadzonej analizie komputerowej rozkładu naprężeń i przemieszczeń przy pomocy programu COMS
więcej podobnych podstron