
Elementy automatyki f. 1-1
1. L
ITERATURA
L
ITERATURA
(
WYKŁAD
)
T. Kaczorek, Teoria sterowania i systemów, WNT, Warszawa 1993
Encyklopedia techniki, Tom Automatyka, WNT, Warszawa 1972
Markowski, J. Kostro, A. Lewandowski, Automatyka w pytaniach i
odpowiedziach, WNT, Warszawa 1979
L. Kami ski, Automatyka, Materiały do wicze , Wydawnictwa
uczelniane, Bydgoszcz 1998
L
ITERATURA
(
LABORATORIUM
)
Zalewski, R. Cegieła, Matlab – obliczenia numeryczne i ich
zastosowania, Wydawnictwo Nakom, Pozna 1996
Mrozek, Z. Mrozek, Matlab 5.x Simulink 2.x poradnik u ytkownika,
Wydawnictwo PLJ, Warszawa 1998

Elementy automatyki f. 1-2
2. P
OJ CIA PODSTAWOWE
(1)
Automatyka – dyscyplina naukowa zajmuj ca si podstawami teorii i
realizacj urz dze steruj cych procesami (gł. technologicznymi) bez
udziału człowieka lub z ograniczonym jego udziałem; podstawowe
działy a. to: regulacja automatyczna, sterowanie procesami zło onymi,
pomiary automatyczne, przetwarzanie i utrwalanie danych,
telemechanika. Jako samodzielna dyscyplina nauk. powstała w latach
20. XX wieku. Pierwszymi urz dzeniami automatycznymi były:
regulator poziomu wody w kotle parowym (1765) i regulator
pr dko ci obrotowej maszyny parowej (1784). [...]
Automatyzacja – wprowadzanie do przemysłu, transportu, pracy
biurowej i in. dziedzin urz dze automatycznych, tj. urz dze
działaj cych na zasadzie samoregulacji i wykonuj cych okre lone
czynno ci bez udziału człowieka; automatyzacja sprowadza rol
człowieka do ogólnego nadzoru. [...]
Sterowanie – oddziaływanie na okre lony proces (obiekt sterowania)
w celu zapewnienia mu wła ciwego przebiegu; wyst puje w
systemach biologicznych i jest stosowane w systemach technicznych
oraz ekonomicznych. [...]
Sterowanie r czne – sterowanie realizowane przez człowieka.
Sterowanie automatyczne – realizowane
przez
odpowiednie
urz dzenie steruj ce.
Elementy automatyki f. 1-3
3. P
OJ CIA PODSTAWOWE
(2)
Obiekt sterowania – układ, w którym mo na wymusi po dane
przebiegi procesów za pomoc oddziaływa steruj cych.
Urz dzenie steruj ce – jest to urz dzenie lub zestaw urz dze , które
generuj sygnały steruj ce.
Układ sterowania – składa si z obiektu sterowanego i urz dzenia
steruj cego (układu steruj cego).
Sygnały wyst puj ce w układach sterowania:
sygnały zadaj ce (sygnały zadane) – wyznaczaj sposób i warto
zmian sygnałów sterowanych (wyj ciowych),
sygnały steruj ce (sterowania) – sygnały doprowadzane do wej
obiektu, zmieniane celowo tak, aby osi gn po dany przebieg
sterowanego procesu,
sygnały zakłócaj ce (zakłócenia) – wszelkie
wyst puj ce
w
układzie oddziaływania, które
utrudniaj realizacj zadania
sterowania. Zakłócenia maja na ogół charakter przypadkowy,
sygnały wyj ciowe (sygnały sterowane) – wyst puj na wyj ciach
układu, s wynikiem oddziaływania na obiekt sygnałów steruj cych
i zakłóce .
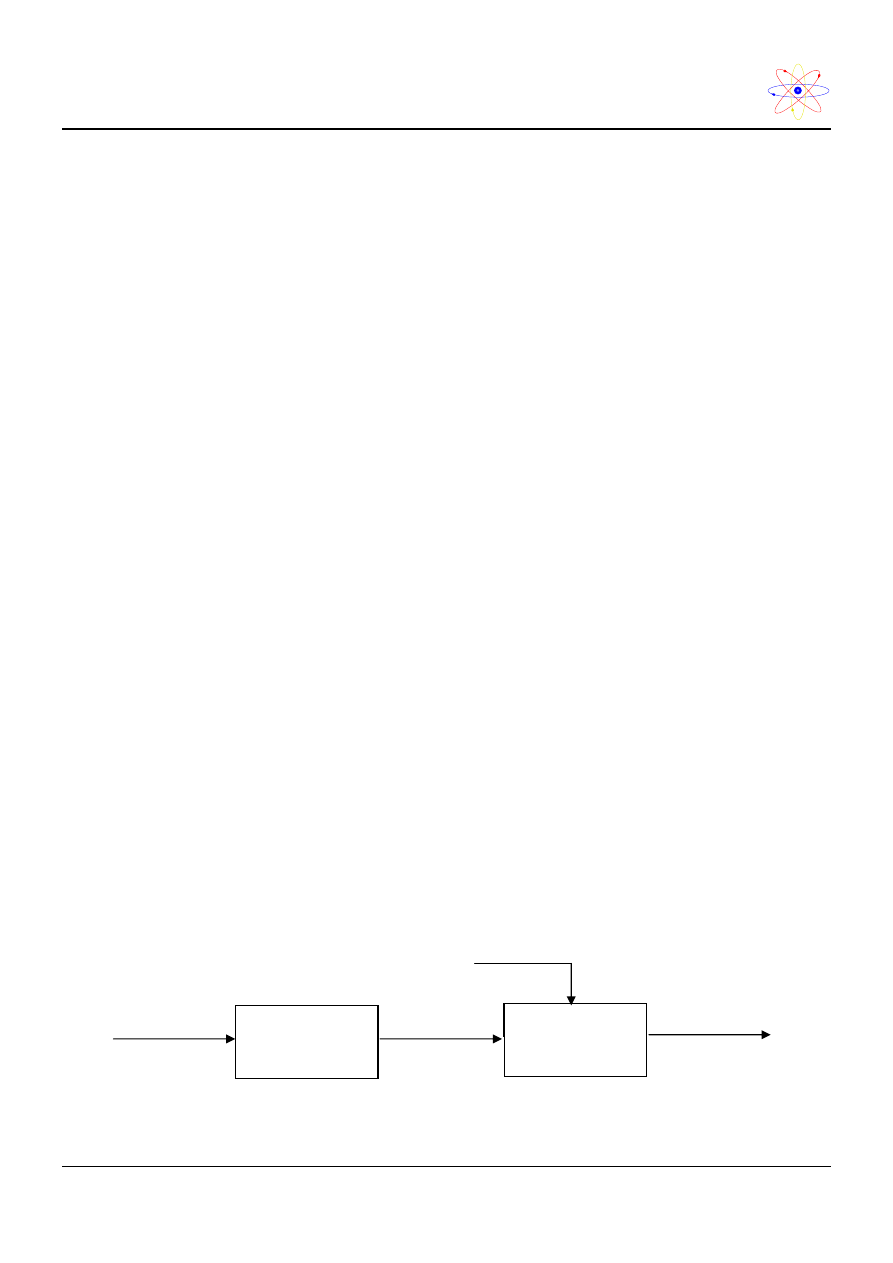
Rys. 3.1. Schemat blokowy układu sterowania
obiekt
sterowania
y
0
(t)
sygnał
zadany
sygnał
steruj cy
u(t)
zakłócenie z(t)
sygnał
sterowany
y(t)
urz dzenie
steruj ce
Elementy automatyki f. 1-4
4. S
CHEMATY BLOKOWE UKŁADÓW STEROWANIA
Schemat blokowy to schemat układu z zaznaczeniem podziału na
elementy i bloki funkcjonalne z uwzgl dnieniem ich wła ciwo ci,
przedstawiaj cy oddziaływania mi dzy tymi elementami i blokami.
Schemat blokowy składa si z
członów poł czonych liniami
skierowanymi przedstawiaj cymi kierunek przepływu sygnałów.
Dodatkowo na schemacie mog wyst powa
w zły zaczepowe
stanowi ce punkty, w których nast puj rozgał zienie sygnału.
Człony wydzielane s w sposób umowny w celu wyznaczenia
zale no ci, które wywieraj wpływ na zachowanie układu. Zale nie
od spełnianych funkcji rozró nia si np. człony pomiarowe,
sumacyjne (w których wyst puje dodawanie lub odejmowanie
sygnałów), wzmacniaj ce itp.
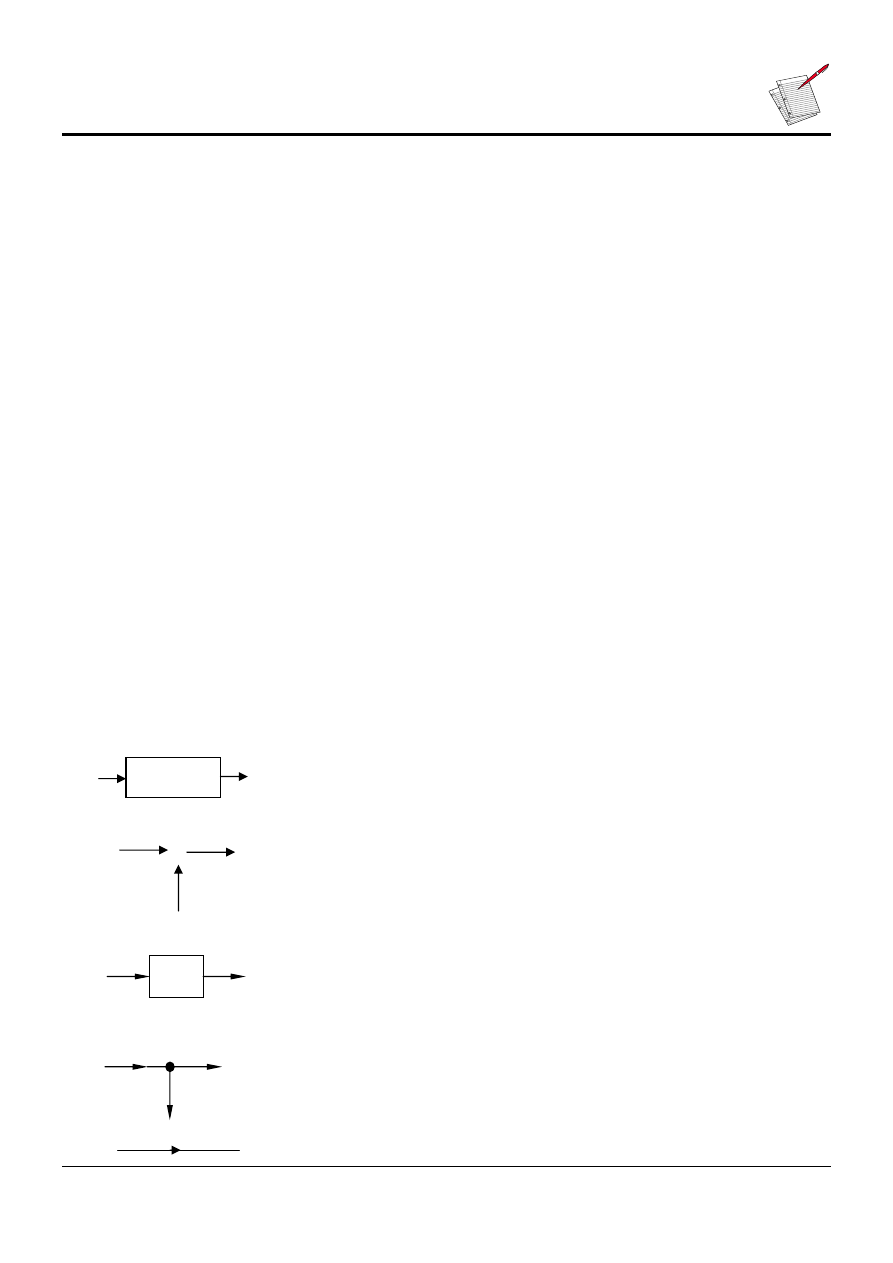
Symbole podstawowych elementów schematu blokowego:
człon
człon sumuj cy (y =
⊕x
1
⊕ x
2
) lub
w zeł sumuj cy
człon wzmacniaj cy (y = k x)
w zeł zaczepowy
kierunek przepływu sygnału
x
x
x
y
x
k
⊗
x
1
⊕
x
2
⊕
y
Elementy automatyki f. 1-5
5. P
RZYKŁAD
–
UKŁAD STEROWANIA
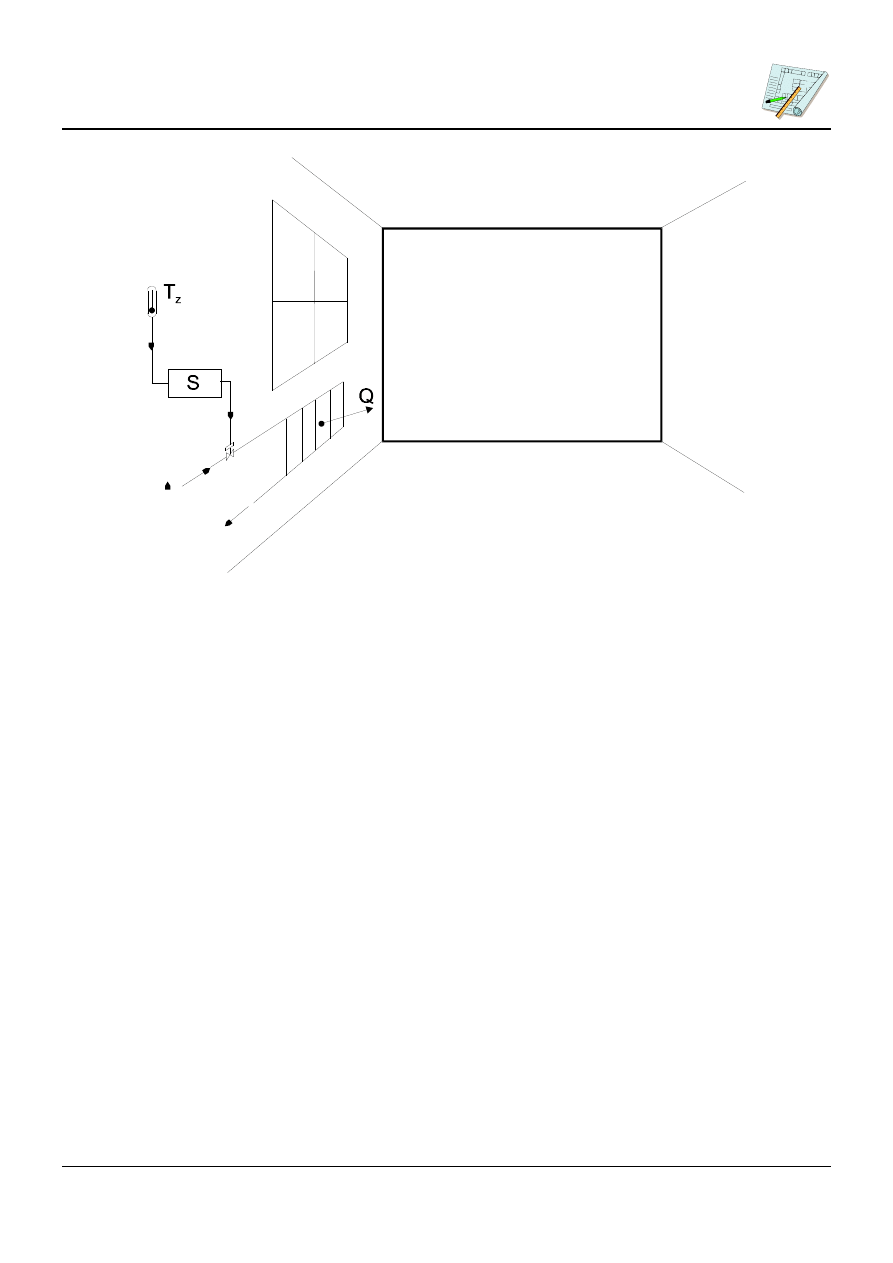
Rys. 5.1. Schemat działania układu utrzymuj cego dan temperatur
Na rysunku przedstawiono układ sterowania, którego zadaniem jest
utrzymywanie danej temperatury
T
0
w pomieszczeniu. Układ ten
składa si z czujnika temperatury zewn trznej
T
z
, oraz urz dzenia
steruj cego
S, którego własno ci dobrano tak, aby zapewniony był
odpowiedni dopływ ciepła
Q do pomieszczenia dla
danej
temperatury
T
0
w zale no ci od temperatury zewn trznej
T
z
.
steruje temperatur
T w pomieszczeniu.
T
0
– sygnał zadany,
T
z
– zakłócenie,
T – sygnał sterowany. Sygnał
steruj cy to np. wielko napi cia przykładanego do silniczka
reguluj cego zawór grzejnika.
Układ pracuje poprawnie, o ile nie wyst puj zakłócenia w postaci
waha temperatury wody zasilaj cej grzejnik, otwarcia okna itp.
Elementy automatyki f. 1-6
6. K
LASYFIKACJA UKŁADÓW STEROWANIA
STRUKTURA
(1)
W zale no ci od powi zania mi dzy urz dzeniami steruj cymi a
obiektem sterowania rozró nia si nast puj ce układy sterowania:
układy otwarte
układy zamkni te
układy kombinowane (zamkni to – otwarte)
W
układach otwartych urz dzenie steruj ce otrzymuje informacje
dotycz ce po danego celu sterowania (sygnały zadaj ce). Ponadto
mo e równie otrzymywa pewne informacje o zakłóceniach lub te o
wielko ciach pomocniczych charakteryzuj cych prac obiektu. W u.o.
oddziaływanie urz dze steruj cych na obiekt sterowania nie zale y
od osi gni tych wyników sterowania tzn. nie zale y od przebiegu
sygnałów sterowanych. Układ otwarty jest wra liwy na zakłócenia. W
celu uzyskania okre lonych sygnałów wyj ciowych nale y tak
modyfikowa sygnały zadaj ce aby uwzgl dnia wyst puj ce
zakłócenia.
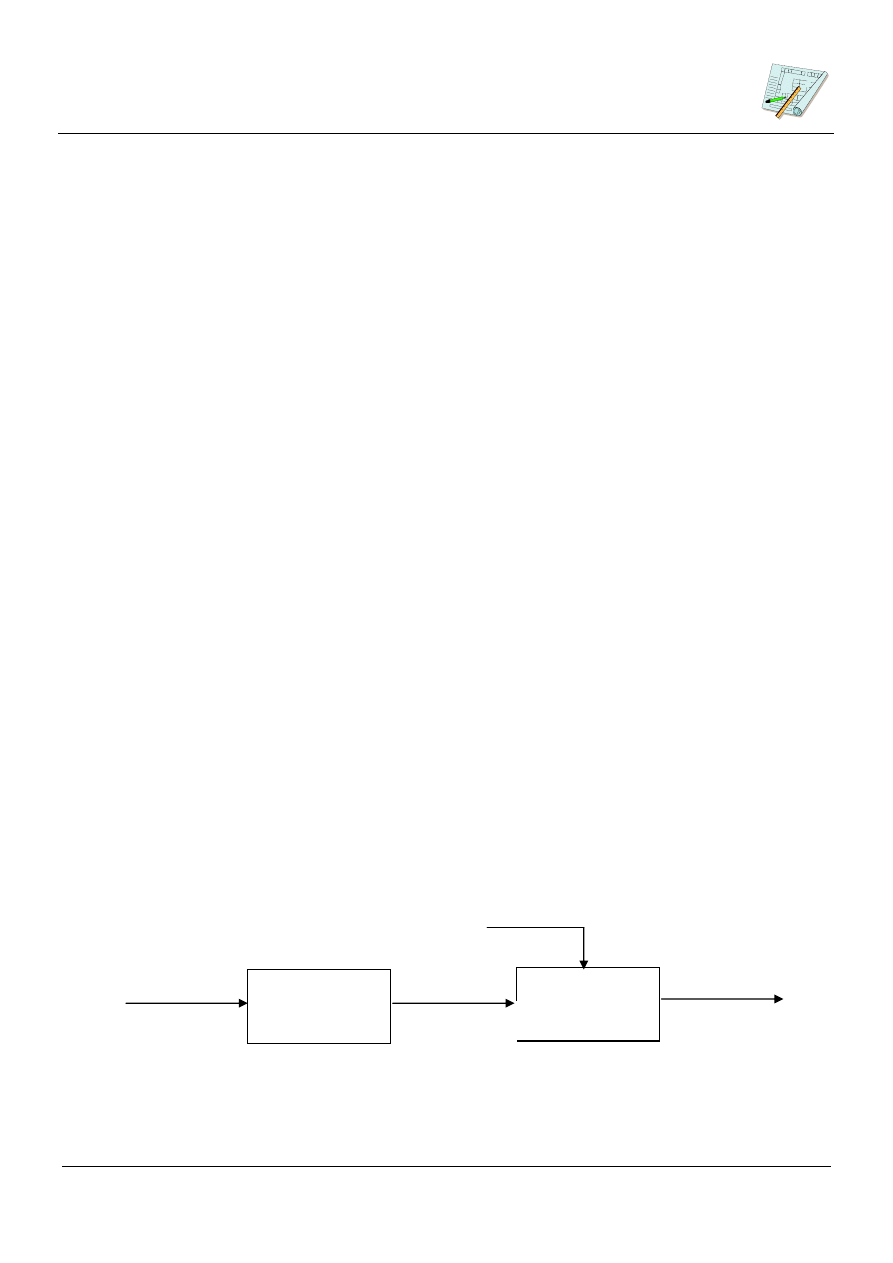
Rys. 6.1. Schemat blokowy układu otwartego
obiekt
sterowania
y
0
(t)
sygnał
zadany
sygnał
steruj cy
u(t)
zakłócenie z(t)
sygnał
sterowany
y(t)
urz dzenie
steruj ce
Elementy automatyki f. 1-7
7. K
LASYFIKACJA UKŁADÓW STEROWANIA
STRUKTURA
(2)
W
zamkni tych układach sterowania urz dzenie steruj ce otrzymuje
informacje dotycz ce zarówno po danego celu sterowania (sygnały
zadaj ce) jak równie skutków sterowania (sygnały sterowane). W
u.z. oddziaływanie urz dze steruj cych na obiekt sterowania zale y
od osi gni tych wyników sterowania tzn. zale y od przebiegu
sygnałów sterowanych.
Wprowadzenie do urz dzenia steruj cego sygnałów wyj ciowych
uniezale nia układ sterowania od zakłóce , poniewa kontrola
skutków sterowania umo liwia bie ce korygowanie tego sterowania.
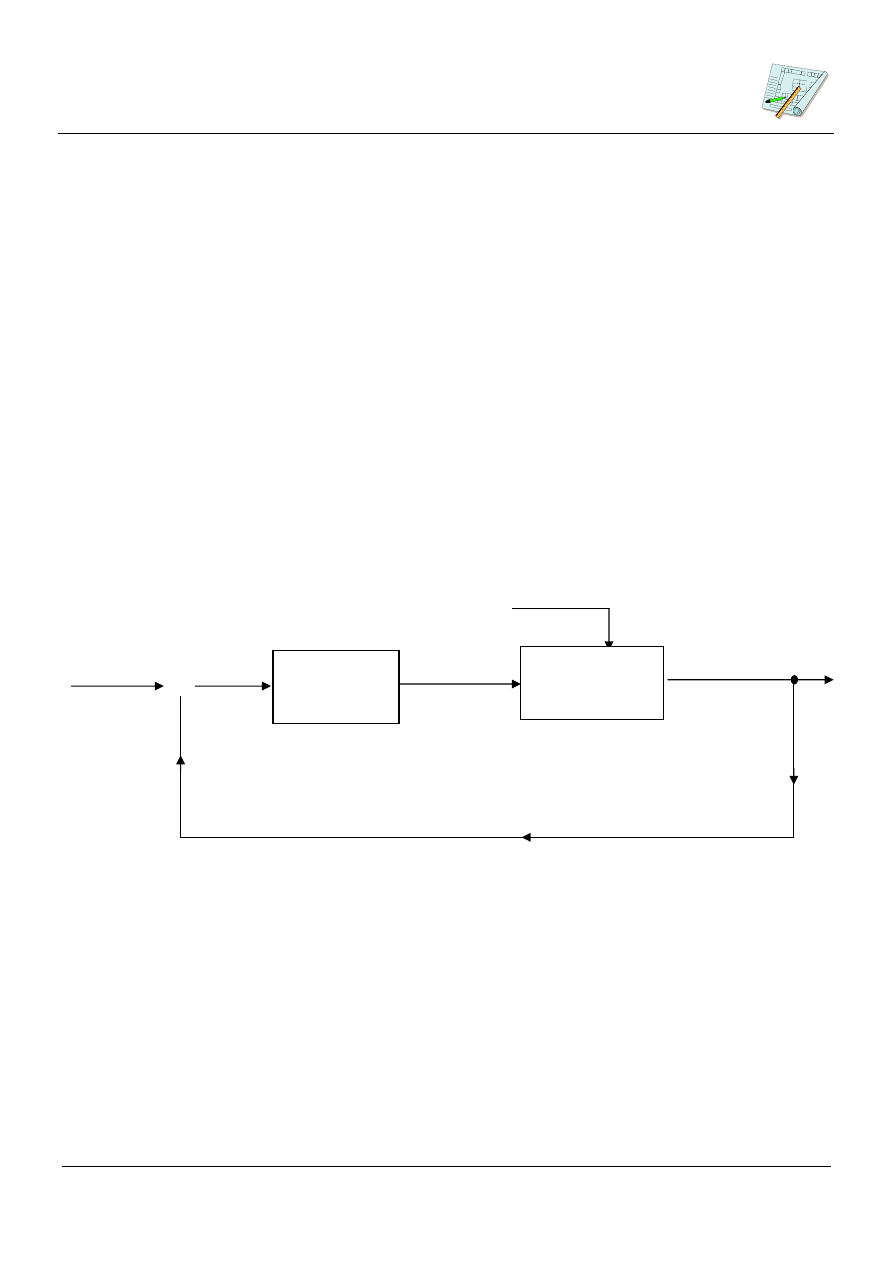
Rys. 7.1. Schemat blokowy układ zamkni tego
Układy kombinowane maj cechy układów otwartego i zamkni tego.
W układach tych kompensuje si w przybli eniu oddziaływanie
podstawowych zakłóce modyfikuj c sygnały zadaj ce (tak jak w
układach otwartych), natomiast wpływ pozostałych zakłóce jest
eliminowany przez układ regulacji (tak jak w układach zamkni tych).
uchyb
regulacji
sprz enie zwrotne
e(t)
y
0
(t)
sygnał
zadany
⊗
sygnał
steruj cy
u(t)
zakłócenie z(t)
sygnał
sterowany
y(t)
obiekt
sterowania
regulator
+
–

Elementy automatyki f. 1-8
8. P
OJ CIA PODSTAWOWE
(3)
Uchyb regulacji – ró nica mi dzy warto ci zadan wielko ci
regulowanej a jej warto ci rzeczywist : e = y
0
– y.
Sprz enie zwrotne – wprowadzenie na wej cie układu oprócz
innych wielko ci wej ciowych informacji o jego wielko ci
wyj ciowej.
Układ regulacji – układ regulacji automatycznej, zamkni ty układ
sterowania; układ sterowania ze sprz eniem zwrotnym, który
zapewnia samoczynnie odpowiedni przebieg wielko ci regulowanych.
W układach regulacji:
urz dzenie steruj ce nazywa si regulatorem,
obiekt sterowania nazywa si obiektem regulacji,
sygnał sterowany nazywa si sygnałem regulowanym.
Regulacja jest poj ciem w szym od sterowania poniewa dotyczy
wył cznie sterowania w układzie zamkni tym.
Elementy automatyki f. 1-9
9. P
OJ CIA PODSTAWOWE
(4)
Zwi zek funkcyjny mi dzy przyrostem sygnału steruj cego u i
przyrostem uchybu regulacji e nazywamy
prawem regulacji.
Prawo to mo na w ogólnej postaci przedstawi :
( )
( ) ( )
( ) ( )
(
)
′
=
K
K
,
,
,
,
,
dt
t
e
t
e
t
e
t
e
f
t
u
m
.
Wyró nia si cztery zasadnicze prawa regulacji:
Prawo regulacji
Regulator
( )
( )
t
e
k
t
u
=
proporcjonalny
P
( )
( )
( )
t
e
k
t
e
k
t
u
D
P
′
+
=
proporcjonalno ró niczkuj cy PD
( )
( )
+
=
dt
e
k
t
e
k
t
u
I
P
proporcjonalno całkuj cy PI
( )
( )
( )
+
′
+
=
dt
e
k
t
e
k
t
e
k
t
u
I
D
P
proporcjonalno całkuj cy ró niczkuj cy
PID
Elementy automatyki f. 1-10
10. P
RZYKŁAD
–
UKŁAD REGULACJI
(1)
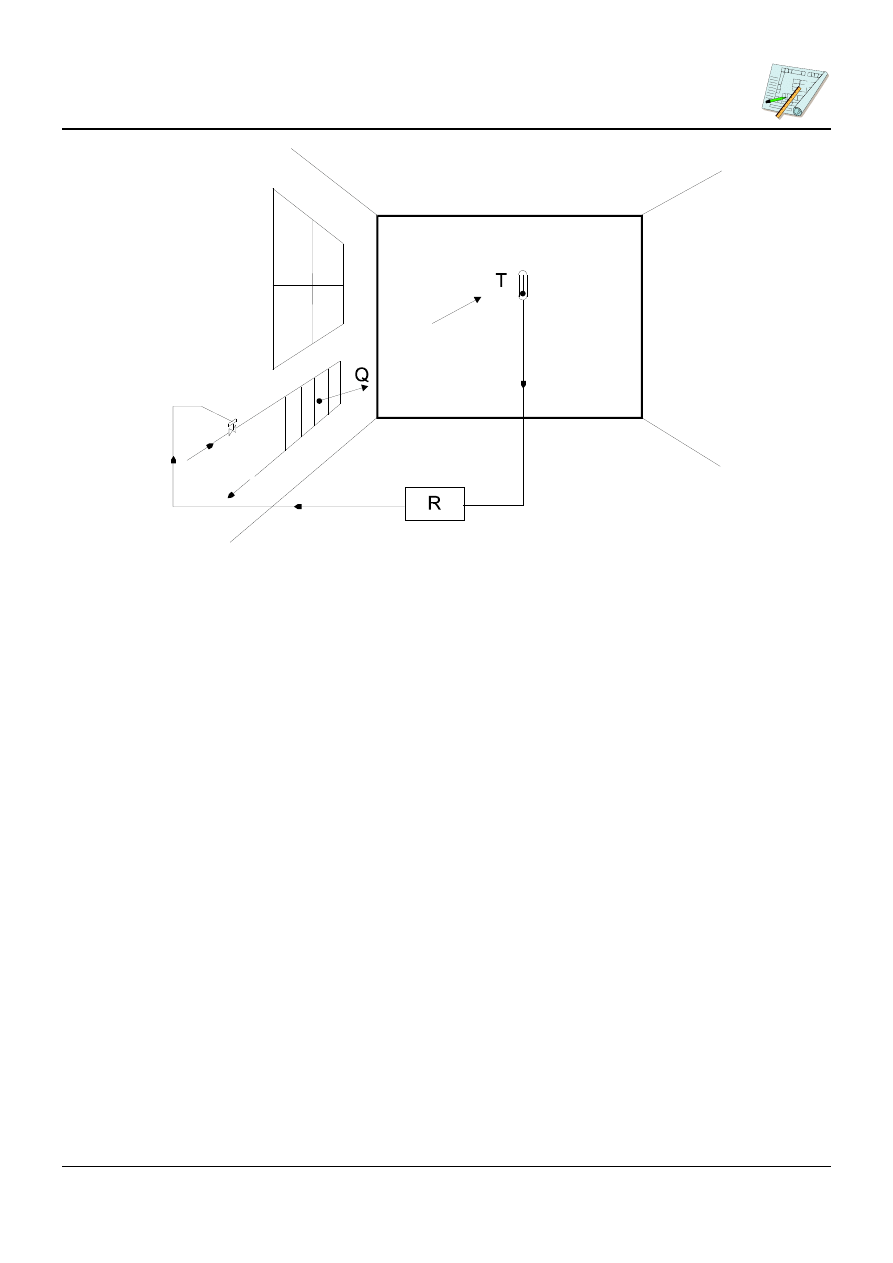
Rys. 10.1. Schemat działania układu utrzymuj cego dan temperatur
Na rysunku przedstawiono układ regulacji, którego zadaniem jest
utrzymywanie danej temperatury
T
0
w pomieszczeniu. Układ ten
składa si z czujnika temperatury w pomieszczeniu
T, regulatora R
oraz zaworu regulacyjnego przed grzejnikiem. Układ pracuje w
obwodzie zamkni tym. Ciepło
Q wydzielane przez grzejnik ma
wpływ na czujnik temperatury
T w pomieszczeniu i dalej na regulator
R.
T
0
– sygnał zadany,
T
z
– zakłócenie,
T – sygnał regulowany. Sygnał
steruj cy to np. wielko napi cia przykładanego do silniczka
reguluj cego zawór grzejnika.
Układ pracuje poprawnie, niweluje zakłócenia w zakresie dost pnej
mocy grzejnika.
Elementy automatyki f. 1-11
11. P
RZYKŁAD
–
UKŁAD REGULACJI
(2)
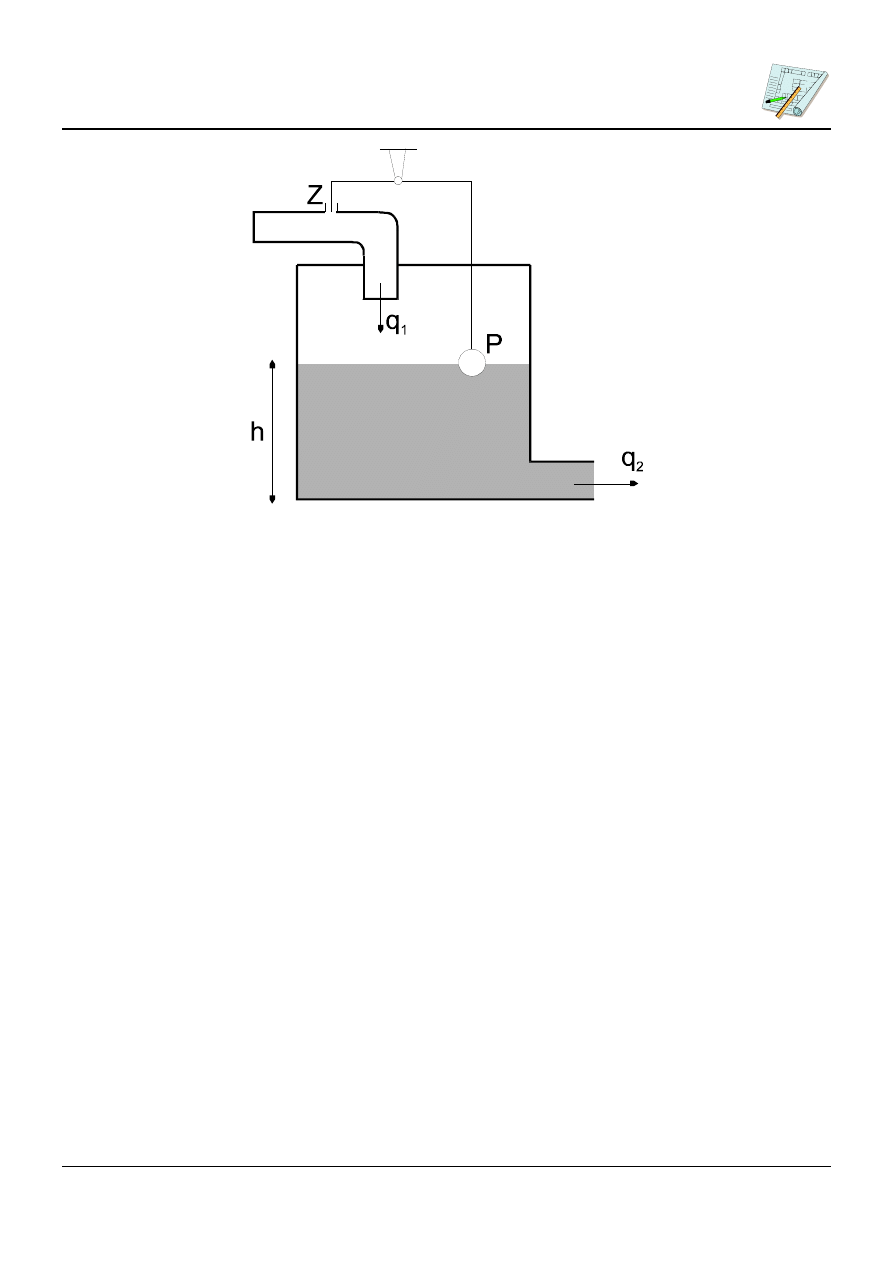
Rys. 11.1. Układ regulacji poziomu cieczy w zbiorniku
Zadaniem układu jest utrzymanie stałego poziomu
h
0
cieczy w
zbiorniku, przy zmieniaj cej si w sposób przypadkowy warto ci
q
2
strumienia cieczy wypływaj cej ze zbiornika. Je eli poziom cieczy w
zbiorniku
h wzrasta – pływak P podnosi si do góry i za pomoc
d wigni i zaworu
Z zmniejsza warto q
1
strumienia cieczy
dopływaj cej do zbiornika, co powoduje stopniowe obni enie
poziomu cieczy
h. Je eli poziom cieczy w zbiorniku zmaleje, to
pływak
P opada i za pomoc d wigni i zaworu Z zwi ksza warto
strumienia wody
q
1
powoduj c podwy szenie poziomu cieczy
h.
Obiektem regulacji jest zbiornik, regulatorem – pływak P, d wignia
i zawór
Z. Wielko ci regulowan jest poziom cieczy h w zbiorniku,
sterowaniem – warto q
1
, zakłóceniem jest
q
2
.
Elementy automatyki f. 1-12
12. P
RZYKŁAD
–
UKŁAD REGULACJI
(3)
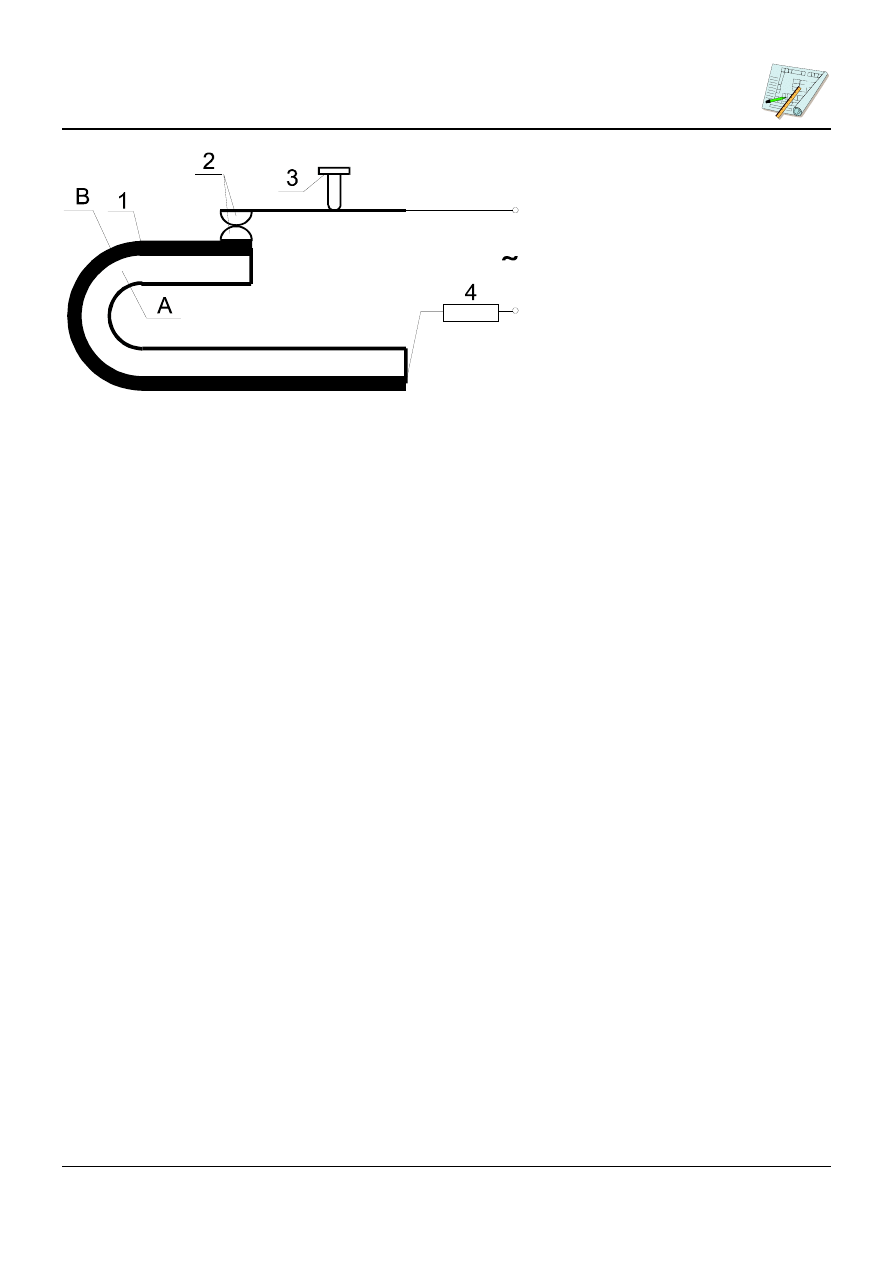
1 – spr yna bimetaliczna,
A – strona o mniejszej
rozszerzalno ci,
B – strona o wi kszej
rozszerzalno ci,
2 – styki,
3 – pokr tło warto ci zadanej
temperatury,
4 – grzejnik
Rys. 12.1. elazko elektryczne z termoregulatorem
Czujnik bimetaliczny to spr yna wykonana z dwóch zł czonych
pasków metali o ró nych współczynnikach rozszerzalno ci cieplnej.
Przy wzro cie temperatury nast puje wyginanie si spr yny w stron
o mniejszej rozszerzalno ci. W stanie spoczynkowym spr yna
zamyka obwód pr du przepływaj cego przez grzejnik elazka. Je li
temperatura dostatecznie wzro nie, spr yna wygnie si tak bardzo, e
styki rozewr si , obwód pr du zostanie przerwany. Po zmniejszeniu
temperatury spr yna powróci do poło enia spoczynkowego, obwód
grzejnika zostanie zamkni ty.
Warto zadan wprowadza si przy pomocy pokr tła – ustalaj c
wst pne napi cie spr yny w stanie spoczynkowym (niewielkie
napi cie wst pne – niska temperatura powoduje rozwarcie, du e
napi cie – wysoka temperatura potrzebna do rozwarcia styków).
Wielko ci regulowan jest temperatura elazka, sterowaniem –
warto napi cia zasilaj cego grzałk .
Elementy automatyki f. 1-13
13. P
RZYKŁAD
–
UKŁAD REGULACJI
(3)
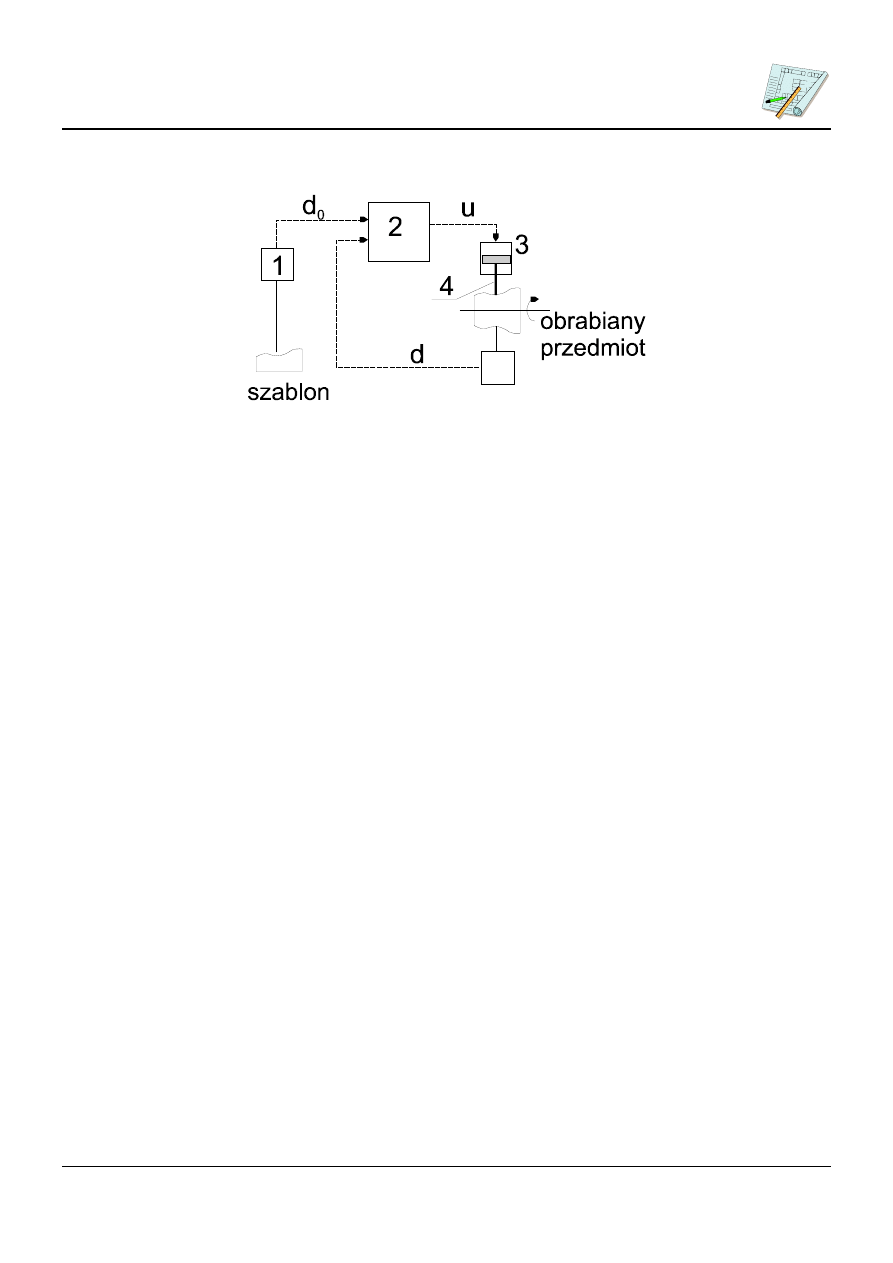
Rys. 13.1. Uproszczony schemat automatycznej obrabiarki
Na rysunku przedstawiono uproszczony schemat obrabiarki
przeznaczonej do precyzyjnego kopiowania. Przesuni cie po dane
d
0
jest mierzone za pomoc czujnika przesuni cia
1. Sygnał pomiarowy
d
0
jest przesyłany do regulatora 2. Regulator porównuje sygnał
d
0
z
sygnałem
d uzyskiwanym w wyniku pomiarów obrabianego
przedmiotu i generuje sygnał steruj cy
u ustawiaj cy tłok
wykonawczy
3 oraz narz dzie skrawaj ce 4.
Warto zadan wprowadza si przy pomocy szablonu – ustalaj c
wielko przesuni cia
d
0
(t).
Wielko ci regulowan jest przesuni cia narz dzia d(t),
sterowaniem – wielko ustawiaj ca narz dzie skrawaj ce u(t).

Elementy automatyki f. 1-14
14. K
LASYFIKACJA UKŁADÓW REGULACJI
(1)
Układy regulacji automatycznej mo na klasyfikowa według ró nych
kryteriów, takich jak: liniowo , liczba wej i wyj , charakter
sygnałów,
zadania
układu,
zdolno
do
samoczynnego
dopasowywania parametrów itp.
K
LASYFIKACJA ZE WZGL DU NA RODZAJ WIELKO CI
REGULOWANEJ
:
układy regulacji napi cia,
układy regulacji ci nienia,
układy regulacji temperatury,
układy regulacji pr dko ci k towej, itp.
K
LASYFIKACJA ZE WZGL DU NA TECHNIK WYKONANIA CZŁONÓW
REGULACYJNYCH
,
WYKONAWCZYCH
,
POMIAROWYCH
:
elektroniczne,
pneumatyczne,
hydrauliczne.
K
LASYFIKACJA ZE WZGL DU NA CHARAKTER SYGNAŁÓW
:
układy ci głe,
układy dyskretne.
Układami ci głymi nazywamy układy, w których sygnały maj
charakter ci gły.
Układami dyskretnymi nazywamy układy, w których przynajmniej
jeden sygnał ma charakter dyskretny.

Elementy automatyki f. 1-15
15. K
LASYFIKACJA UKŁADÓW REGULACJI
(2)
K
LASYFIKACJA ZE WZGL DU NA CECH LINIOWO CI
:
układy liniowe,
układy nieliniowe.
Układy liniowe s to takie układy, których opis ma posta zale no ci
liniowych. Postulat liniowo ci wymaga, aby była spełniona zasada
superpozycji. Oznacza to, e reakcja układu na wymuszenie postaci
u = c
1
u
1
+ c
2
u
2
ma posta y = c
1
y
1
+ c
2
y
2
, przy czym y
1
i y
2
stanowi
wynik oddziaływania oddzielnych wymusze u
1
i u
2
, a c
1
i c
2
s
dowolnymi stałymi. Układy liniowe opisane s liniowym równaniami
algebraicznymi, ró niczkowymi (zwyczajnymi i cz stkowymi),
ró nicowymi, całkowymi – ogólnie operatorami liniowymi.
Układy regulacji nazywa b dziemy
nieliniowym je li nie spełnia on
zasady superpozycji. Układy nieliniowe opisane s nieliniowym
równaniami algebraicznymi, ró niczkowymi (zwyczajnymi i
cz stkowymi), ró nicowymi, całkowymi – ogólnie operatorami
nieliniowymi.
K
LASYFIKACJA ZE WZGL DU NA LICZB WEJ I WYJ
:
układy o jednym wej ciu i jednym wyj ciu (np.: układ regulacji
poziomu cieczy w zbiorniku),
układy o wielu wej ciach i wielu wyj ciach.

Elementy automatyki f. 1-16
16. K
LASYFIKACJA UKŁADÓW REGULACJI
(3)
K
LASYFIKACJA ZE WZGL DU NA LICZB ZMIENNYCH
NIEZALE NYCH OPERATORÓW OPISUJ CYCH UKŁAD
:
układy jednowymiarowe,
układy wielowymiarowe.
Układy jednowymiarowe opisywane s operatorami jednej zmiennej
niezale nej (zwykle jest ni czas).
Układy wielowymiarowe s opisywane operatorami zale nymi od
przynajmniej dwóch zmiennych niezale nych. (przykładem układu
dwuwymiarowego jest linia długa, w której napi cie i nat enie pr du
s zale ne od czasu i od odległo ci od pocz tku linii).
K
LASYFIKACJA ZE WZGL DU NA ZADANIE
:
układy regulacji stałowarto ciowej (stabilizacji automatycznej),
układy regulacji programowej,
układy regulacji nad nej (układy nad ne albo ledz ce),
układy regulacji ekstremalnej.
Układami regulacji stałowarto ciowej nazywamy układy, których
wielko zadaj ca ma stał warto . (przykładem jest układ regulacji
poziomu cieczy w pojemniku).
Układami regulacji programowej nazywamy układy, których
wielko zadaj ca jest znan funkcj czasu. (przykładem jest
automatyczna obrabiarka wykonuj ca element o zadanym kształcie).
Elementy automatyki f. 1-17
17.
K
LASYFIKACJA UKŁADÓW REGULACJI
(4)
Układami regulacji nad nej nazywamy układy, których wielko
zadaj ca nie jest znan z góry funkcj czasu, ale zale y od zjawisk
wyst puj cych na zewn trz układu. W układzie nad nym wielko
regulowana nad a za zmianami wielko ci zadaj cej (przykładem jest
radarowy układ artylerii przeciwlotniczej, ledz cy ruch samolotu).
Układami regulacji ekstremalnej nazywamy układy, których
wielko ci regulowane przybieraj warto ci ekstremalne (przykładem
jest układ regulacji, którego zadaniem jest tłoczenie takiej ilo ci
powietrza do komory spalania, aby temperatura spalania gazu
palnego, znajduj cego si w tej komorze była najwi ksza).
K
LASYFIKACJA ZE WZGL DU NA SPOSÓB POMIARU WIELKO CI
REGULOWANEJ
:
układy analogowe (wielko mierzona w sposób ci gły),
układy cyfrowe (wielko mierzona w sposób dyskretny).
Układy cyfrowe wymagaj stosowania przetworników A/C i C/A.
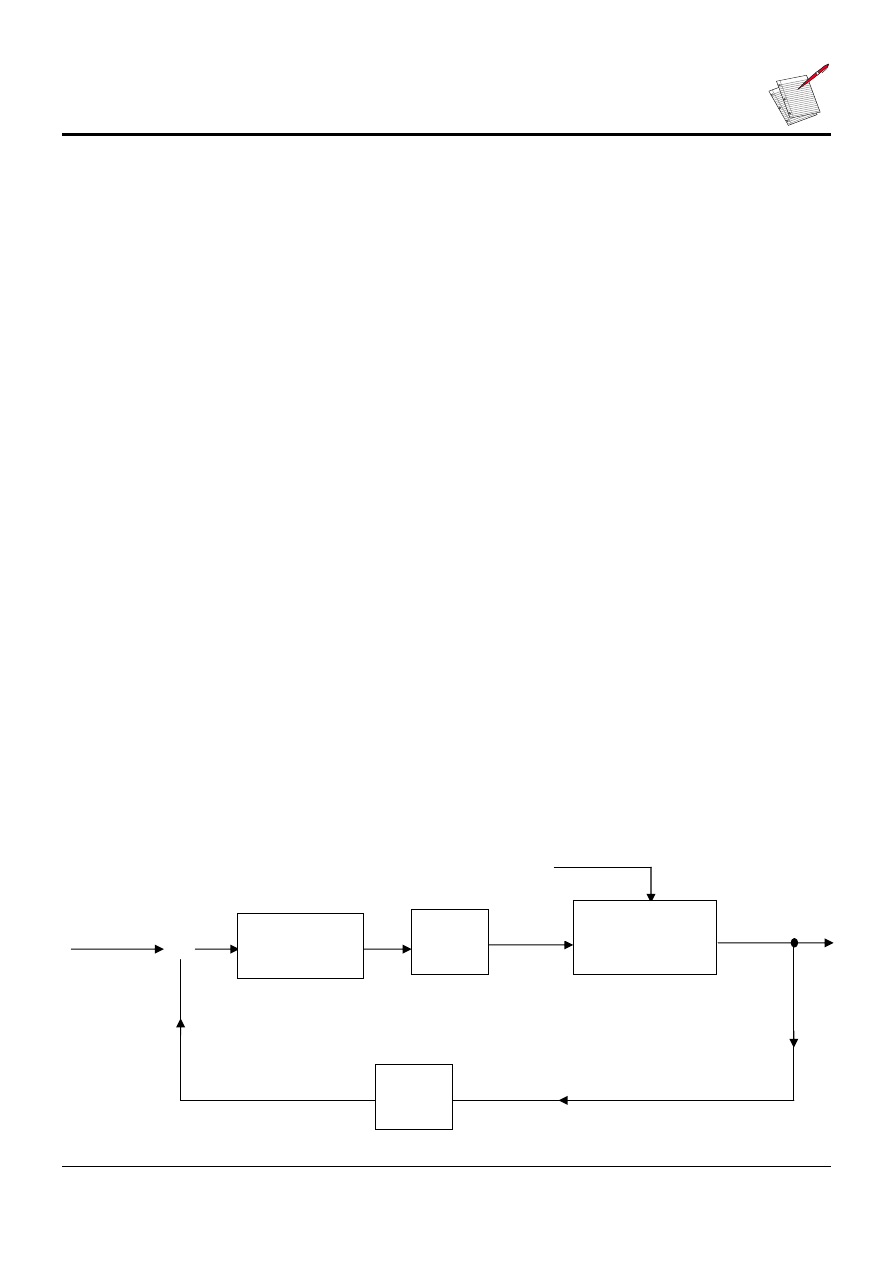
Rys. 17.1. Schemat układu regulacji z regulatorem cyfrowym
y
0
(t)
u(t)
z(t)
y(t)
obiekt
sterowania
regulator
C/A
A/C
⊗
+
–

Elementy automatyki f. 1-18
18. K
LASYFIKACJA UKŁADÓW REGULACJI
(5)
K
LASYFIKACJA ZE WZGL DU NA ZDOLNO SAMOCZYNNEGO
PRZYSTOSOWYWANIA SI DO ZMIENNYCH WARUNKÓW PRACY
:
układy adaptacyjne
układy zwykłe (nieadaptacyjne)
Układami adaptacyjnymi nazywany układy maj ce zdolno do
samoczynnego dopasowywania parametrów do zmieniaj cych si
wła ciwo ci obiektów i zakłóce (przykładem jest układ regulacji
automatycznej kursu samolotu, tzw. autopilot, którego parametry
samoczynnie dopasowuj si do zmieniaj cych si wła ciwo ci
samolotu na skutek waha pr dko ci lotu, g sto ci atmosfery,
oblodzenia samolotu itp.).
K
LASYFIKACJA ZE WZGL DU NA SPOSÓB REALIZACJI STEROWANIA
:
układy jednowarstwowe,
układy wielowarstwowe (wielopoziomowe lub hierarchiczne).
W układach wielowarstwowych wyst puj przynajmniej dwa poziomy
sterowania. W typowym układzie wielowarstwowym wyst puje
warstwa stabilizacji, warstwa optymalizacji i warstwa koordynacji.
Regulator najni szej warstwy stabilizuje warto regulowan na
zadanym poziomie, który jest wyznaczany przez regulator warstwy
optymalizacji,.
Regulator
warstwy
najwy szej
koordynuje
współdziałanie regulatorów lokalnych.
Document Outline
- Literatura
- Pojęcia podstawowe (1)
- Pojęcia podstawowe (2)
- Schematy blokowe układów sterowania
- Przykład – układ sterowania
- Klasyfikacja układów sterowania struktura (1)
- Klasyfikacja układów sterowania struktura (2)
- Pojęcia podstawowe (3)
- Pojęcia podstawowe (4)
- Przykład – układ regulacji (1)
- Przykład – układ regulacji (2)
- Przykład – układ regulacji (3)
- Przykład – układ regulacji (3)
- Klasyfikacja układów regulacji (1)
- Klasyfikacja układów regulacji (2)
- Klasyfikacja układów regulacji (3)
- Klasyfikacja układów regulacji (4)
- Klasyfikacja układów regulacji (5)
Wyszukiwarka
Podobne podstrony:
automatyka10001 id 73404 Nieznany
automatyka id 73112 Nieznany (2)
automaty id 72943 Nieznany (2)
Automaty 2 id 72948 Nieznany (2)
automaty 3 id 72951 Nieznany (2)
Podstawy automatyki id 366718 Nieznany
AutomatykaCw5 id 73408 Nieznany (2)
AutomatykaCw8 id 73410 Nieznany (2)
Automatyka 7 id 73137 Nieznany (2)
AutomatykaCw4 id 73407 Nieznany (2)
automatyka10001 id 73404 Nieznany
automatyka wykl 1 id 73377 Nieznany
Automatyka nkf cyfrowe id 62906 Nieznany (2)
Automatyka i robotyzacja id 733 Nieznany
Automatyka ulog w8 id 629066 Nieznany (2)
4 2 RG Automaty skonczone id 38 Nieznany (2)
automatyka sprawko 2 id 73363 Nieznany
automatyka c2 id 73267 Nieznany (2)
Automatyka i Robotyka id 73294 Nieznany
więcej podobnych podstron