ZWIĄZEK MIĘDZY RÓWNANIEM STANU, RÓWNANIEM WYJŚCIA A
MACIERZĄ TRANSMITANCJI.
Punktem wyjścia niech będzie układ dynamiczny:
liniowy,
stacjonarny,
wielowymiarowy.
Układ taki opisują równania układu: równanie stanu i równanie wyjścia:
gdzie wektory U(t), X(t) i Y(t) są określone następująco:
U(t) - wektor sygnałów
wejściowych,
U(t)=
X(t) - wektor stanu,
X(t)=
Y(t) - wektor sygnałów wyjściowych,
Y(t)=
ZASTOSOWANIE MACIERZY TRANSMITANCJI:
analiza, rozwiązywanie zadań sterowania i badanie stabilności układów o
wielu wejściach i wyjściach oraz układów wielopoziomowych,
wyznaczanie zmiennych stanu i macierzy A, B i C równań układu,
w przypadku transmitancji skalarnej G(s) dokonując zestawienia
poznanych wyrażeń na tę transmitancję, mamy: wielomian
charakterystyczny układu i wielomian charakterystyczny macierzy A.
Miejsca zerowe, czyli pierwiastki charakterystyczne to wartości dla
których transmitancja jest nieokreślona.
Zatem macierz A i wielomian charakterystyczny pozwalają na ocenę
własności dynamicznych układu.
2. ZASADY DOBORU ZMIENNYCH STANU.
a)wyboru zmiennych stanu można dokonać na podstawie:
-analizy zjawisk zachodzących w obiekcie (układzie, procesie)
-macierzy transmitancji
b)na podstawie analizy zjawisk obiektu (układu, procesu) formułuje się równania opisujące
dynamikę układu, należy dążyć aby zmiennym stanu przyporządkować sygnały
występujące w obiekcie,
c)w przypadku, gdy znana jest macierz transmitancji G(s), szuka się macierzy A, B i C
spełniających równania:
G(s) = C (sI - A)
-1
B oraz
należy jednak uwzględniać, że:
macierz transmitancji nie dostarcza informacji o ilości zmiennych stanu,
ten sam układ może być opisany innymi zmiennymi stanu,
d)w ogólnym przypadku, dobór zmiennych stanu powinien uwzględniać:
-minimalizację liczby zmiennych stanu, czyli minimalny rozmiar macierzy stanu A,
-wybrane zmienne stanu muszą spełniać warunek niezależności liniowej,
-jeśli wybrano więcej niż jeden zestaw zmiennych stanu to przejście od jednych
współrzędnych do innych musi być wzajemnie jednoznaczne,
RODZAJE ZMIENNYCH STANU:
fizykalne, fazowe, kanoniczne (nie będą omawiane),
zmienne fizykalne:
-wybiera się minimalną liczbę n -liniowo niezależnych wielkości reprezentujących sygnały
fizyczne,
-na podstawie relacji określających dynamikę zmian tych wielkości układa się równania
stanu,
zmienne fazowe: dobór zmiennych fazowych następuje przy następujących założeniach
dotyczących układu dynamicznego, układ dynamiczny jest:
liniowy,stacjonarny,ciągły,jednowymiarowy,
WŁASNOŚCI FIZYKALNYCH I FAZOWYCH ZMIENNYCH STANU:
fizykalne
fazowe
1.
model matematyczny staje
się modelem fizycznym,
2.
możliwość
pomiaru
wielkości fizycznych,
3.
można narysować schemat
blokowy układu,
4.
możliwość syntezy układu
sterowania w przypadku
sprzężenie
zwrotnego
uzależnionego od wektora
stanu.
1.
zmienne
fazowe
mogą
mieć znaczenie fizykalne,
2.
ułatwiają analizę dynamiki
układów,
3.
ułatwiają analizę układów
w stanach przejściowych
(nieustalonych),
4.
ułatwiają
modelowanie
analogowe,
ponieważ
przez
wprowadzenie
elementów całkujących i
proporcjonalnych.
UKŁAD JEST STEROWALNY
(całkowicie), gdy: ograniczone przedziałami ciągłe sterowanie U(t) przeprowadza układ z
dowolnego stanu początkowego X(t
0
) w chwili t=t
0
do dowolnego stanu końcowego X(t
k
)
w chwili t=t
k
w skończonym przedziale czasu t
k
-t
0
=0.
STEROWALNOŚĆ
oznacza możliwość osiągnięcia dowolnego stanu układu w skończonym czasie za pomocą
dopuszczalnego sterowania.
UKŁADY NIESTEROWALNE
to układy, które są niecałkowicie sterowalne. Układ niecałkowicie sterowalny to układ,
który przy określonym doborze zmiennych stanu zawiera takie zmienne stanu, których nie
można za pomocą ograniczonego przedziałami ciągłego sterowania przeprowadzić z
dowolnej wartości początkowej X
i
(t
0
) do X
i
(t
k
).
Na podstawie definicji sterowalności całkowitej i niecałkowitej wprowadza się także
odpowiednie pojęcia sterowalności ze względu na wyjście, które określają zmiany wektora
sygnałów wyjściowych w chwilach t
0
i t
k
.
UKŁAD JEST OBSERWOWALNY
(całkowicie), jeśli przy danym dowolnym sterowaniu U(t), istnieje skończona chwila t
k
, po
której, na podstawie znajomości wektora sygnałów wyjściowych Y(t) i wektora sterowania
U(t) w przedziale od t
0
do t
k
można wyznaczyć stan układu X(t
0
) w dowolnej chwili
początkowej t
0
.
OBSERWOWALNOŚĆ
oznacza, że na podstawie przebiegu sygnału wyjściowego w skończonym przedziale czasu,
można określić stan układu w dowolnej chwili tego przedziału.
WŁASNOŚCI UKŁADÓW STEROWALNYCH I OBSERWOWALNYCH:
Układ sterowalny:
-to układ w którym wektor sygnałów wejściowych oddziaływuje na wszystkie zmienne
stanu, czyli zapewnia skuteczne sterowanie,
-zmiana wektora wejść wywołuje różne zmiany każdej współrzędnej stanu.
Układ obserwowalny:
-to układ w którym istnieją relacje między wszystkimi sygnałami wektora wyjściowego a
sygnałami wektora stanu, czyli na podstawie przeprowadzonej w skończonym czasie
obserwacji (analizy) sygnałów wyjściowych i sterujących można jednoznacznie określić
wektor stanu początkowego,
-zmiana wektora stanu wywołuje różne zmiany wyjścia czyli musi zachodzić odróżnienie
wpływu każdej zmiennej stanu na zmianę obserwowanego wektora wyjść.
Układ niesterowalny:
-to układ w którym wektor wejść U(t) nie ma wpływu na wszystkie zmienne stanu.
Układzie nieobserwowalny:
-to układ w którym między dowolnym wektorem wyjść Y(t) nie zachodzą relacje między
wszystkimi zmiennymi stanu X(t).
OCENA STEROWALNOŚCI I OBSERWOWALNOŚCI
może być przeprowadzona na podstawie analizy:
-postaci kanonicznej równania stanu i równania wyjścia,
-bezpośredniej analizy schematu blokowego.
WARUNEK STEROWALNOŚCI:
Warunkiem koniecznym i dostatecznym (wystarczającym) sterowalności jest, aby macierz
o n -
wierszach i m - kolumnach miała rząd n, czyli n - liniowo niezależnych kolumn.
WARUNEK
OBSERWOWALNOŚCI:
Warunkiem koniecznym i dostatecznym (wystarczającym) obserwowalności jest, aby
macierz:
o wymiarach m x n miała rząd n, czyli zawierała n - liniowo
niezależnych
wierszy.
Dla ułatwienia analizy macierzy O, wprowadza się macierz W, która jest transpozycją
macierzy O. Warunek obserwowalności odnoszący się do macierzy W formułuje się
następująco: układ jest całkowicie obserwowalny wtedy i tylko wtedy, gdy rząd macierzy
jest równy n.
UKŁAD STEROWANIA MOŻE WIĘC ZAWIERAĆ CZĘŚCI:
SO - sterowalne i obserwowalne,
S NO - sterowalne lecz nieobserwowalne,
O NS - obserwowalne lecz niesterowalne,
NS NO - niesterowalne i nieobserwowalne.
Części te można wydzielić na podstawie:
schematów blokowych,
przekształceń równań stanu i równania wyjścia.
WYZNACZYĆ TRANSMITANCJĘ ZASTĘPCZĄ OBIEKTU A NASTĘPNIE
WYZNACZ RÓWNANIE
CHARAKTE
RYSTYCZNE, RÓWNANIE RÓŻNICZKOWE I RÓWNANIE
MACIERZOWE.
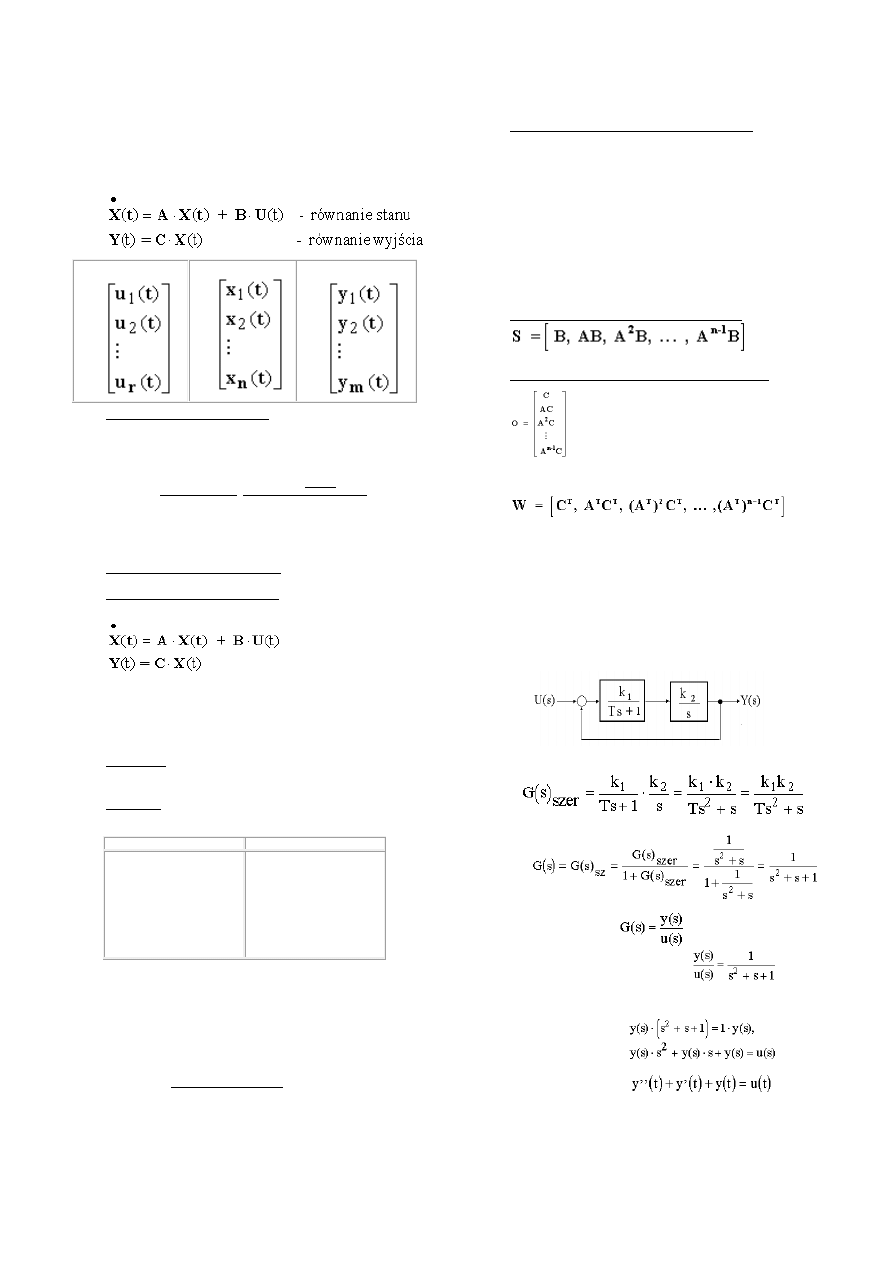
Dana jest struktura regulatora o określonych transmitancjach, jak na rysunku. Dokonać
syntezę układu i wyprowadzić równania stanu i wyjścia.
1.
Obliczenie transmitancji wypadkowej.
a.
transmitancja dwóch elementów połączonych
szeregowo:
b.
transmitancja wypadkowa po uwzględnieniu sprzężenia
zwrotnego i wartości podstawień: T=1, k
1
=1, k
2
=1:
c.
po uwzględnieniu definicji transmitancji tj.
, transmitancja wypadkowa
wyraża się następująco:
,
na podstawie powyższego wyrażenia można utworzyć
równania stanu i wyjścia obiektu dynamicznego.
2.
Wyprowadzenie równań obiektu dynamicznego i macierzy.
a.
Wymnażając stronami równanie p.1c otrzymujemy:
a po przejściu do dziedziny czasu otrzymujemy:
,
b.
Otrzymane równanie jest równaniem różniczkowym II
rzędu, zatem można utworzyć dwa równania
różniczkowe I rzędu, które odpowiadać będą dwóm
równaniom stanu o postaci normalnej. Jako zmienną
stanu obieramy sygnał wyjściowy y(t) a wtedy, zgodnie
z zasadami doboru zmiennych fazowych, można
utworzyć relacje:
Zatem równania obiektu dynamicznego są następujące:
2 równania stanu i równanie wyjścia
Macierze odnoszące się do powyższego układu równań są następujące:
A=
, b=
, c=
,
Analiza obejmuje badanie układów regulacji (regulatorów i obiektów) przy pomocy metod
stosowanych do badania układów dynamicznych. Wynikiem analizy jest identyfikacji
układów regulacji.
Synteza to szereg kolejnych działań niezbędnych dla zaprojektowania układu regulacji.
Działania te obejmują:
opis matematyczny obiektu,
opis zadania sterowania, czyli charakterystyki sygnału zadanego,
opis zakłóceń,
dobór wskaźników jakości regulacji,
założenia dotyczące sygnałów układu regulacji i struktury regulatora.
Wynikiem syntezy jest projekt układu regulacji zawierający opis matematyczny regulatora
spełniający założenia współczynników jakości regulacji.
RODZAJE UKŁADÓW REGULACJI
Można wyróżnić, zależnie od przyjętego kryterium klasyfikacji, następujące rodzaje
układów regulacji:
a)zależnie od liczby regulowanych wielkości:
o
jednowymiarowe (regulacja jednej zmiennej)
o
wielowymiarowe
(regulacja
wielu
sygnałów
wyjściowych).
b)poprzez analogię do układów dynamicznych:
o
ciągłe,
o
impulsowe,
o
liniowe,
o
nieliniowe
c)ze względu na charakter sygnału zadanego y
o
(t), układy regulacji mogą być układami:
o
regulacji
stałowartościowej,
gdy
sygnał
y
o
(t)=y
o
=const.
o
regulacji programowalnej, gdy przebieg sygnału jest
zaprogramowany (przewidziany z góry),
o
regulacji nadążnej, gdy sygnał y
o
(t) ma charakter nie
przewidziany,
o
regulacji ekstremalnej, gdy celem regulacji jest
utrzymanie sygnału wyjściowego lub sygnałów
wyjściowych na poziomie wartości ekstremalnych
(minimalnych lub maksymalnych)
d)ze względu na możliwość zmiany własności regulatora w czasie jego pracy:
o
układy adaptacyjne, gdy dla zmieniających się w
czasie pracy równań obiektu następuje dostosowanie,
czyli adaptacja równań regulatora,
o
układy optymalne, gdy osiąga się możliwie najlepsze
wartości współczynników jakości, niezależnie od
struktury regulatora,
o
układy suboptymalne, gdy przy określonym typie
regulatora uzyskuje się najlepsze współczynniki jakości
UKŁAD STATYCZNY REGULACJI to układ, którego uchyb statyczny w stanie
ustalonym przy wymuszeniu skokowym y
o
(t) lub z(t) jest różny od zera, niezależnie od
amplitudy wymuszenia, tzn., że w układzie statycznym występują różne od zera
proporcjonalne do wartości skokowego lub stałego pobudzenia uchyby ustalone.
UKŁAD ASTATYCZNY REGULACJI to układ w którym uchyb statyczny, czyli uchyb
ustalony przy wymuszeniu skokowym jest równy 0.
DOKŁADNOŚĆ REGULACJI to wielkość różnicy między sygnałem wartości zadanej
y
o
(t) a sygnałem wyjściowym y(t).
W praktyce dąży się do uzyskania tzw. dokładności wystarczającej lub określa się
dopuszczalną bezwzględną wartość uchybu dynamicznego i uchybu ustalonego.
Dokładność dynamiczną osiąga się poprzez dobór parametrów i korekcji regulatora.
Dokładność statyczną ustala się na dopuszczalnym poziomie. Kryterium dokładności
statycznej jest jednoznaczne: albo układ regulacji jest astatyczny i nie ma uchybu albo jest
statyczny i posiada uchyb. Zerowanie uchybu ustalonego osiąga się wprowadzając do
regulatora układy całkujące. Dążenie do zerowania uchybu może powodować utratę
stabilności.
STABILNOŚĆ REGULACJI
1)Doprowadzenie uchybu ustalonego do wartości zerowej osiąga się poprzez
wprowadzenie wymaganego poziomu (stopnia) astatyzmu, czyli liczbę biegunów
transmitancji G
o
(s).
2)Ocena stabilności zamkniętego układu regulacji może zostać dokonana na podstawie
układu otwartego. Mianowniki wyrażeń określających transmitancję układu zamkniętego
zawierają wyrażenie 1+G
o
(s), które można traktować jak równanie charakterystyczne:
i znaleźć wartości s, które spełniają to równanie. Aby układ był stabilny, pierwiastki
równania charakterystycznego powinny znajdować się w lewej półpłaszczyźnie zmiennej
zespolonej s. W praktyce do oceny stabilności stosuje się metody algebraiczne.
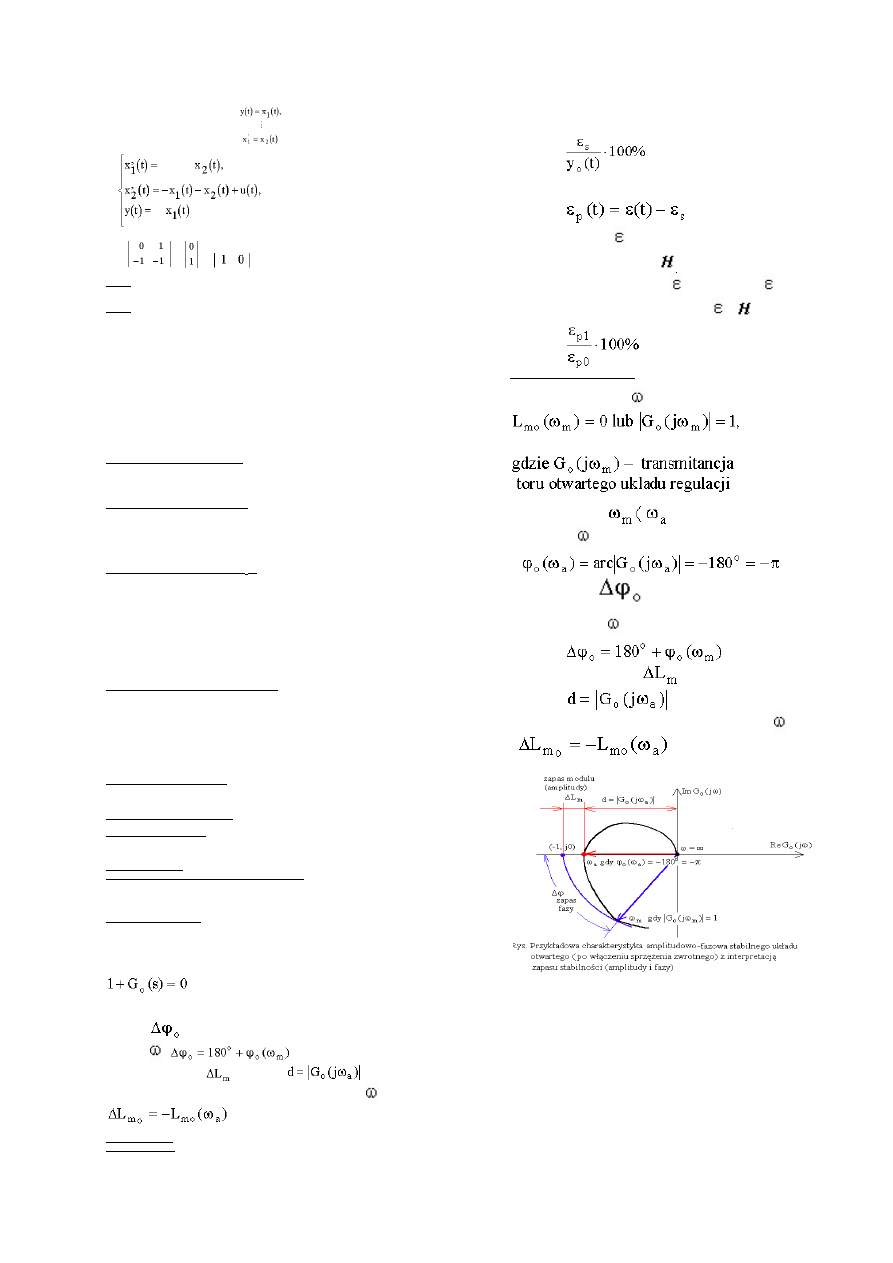
6. zapas fazy
określa odchylenie charakterystyki fazowej od wartości -180
o
dla
częstotliwości
m
.
7. zapas modułu (amplitudy
) lub wielkość
określa
odchylenie charakterystyki amplitudowej od wartości 0 [dB] dla częstotliwości
a
:
+częstotliwość graniczna fazy i modułu
Wskaźniki regulacji:
Nieczestotliwosciowe:
1.
wskaźnik uchybu ustalonego określa się przez podanie:
1. wartości dopuszczalnej w jednostkach fizycznych,
2. w jednostkach względnych
2.
czas regulacji t
r
przedział czasu od chwili wymuszenie do chwili w której uchyb
przejściowy:
, nie przekroczy 5% wartości
maksymalnej tj.
po
3.
współczynnik przeregulowania
,
iloraz największej wartości uchybu
p1
o znaku przeciwnym do
po
i
maksymalnej wartości uchybu przejściowego (tj.
po
),
=
Częstotliwościowe wskaźniki regulacji:
1.
częstotliwość graniczna modułu L
m
charakterystyki amplitudowej
oznacza częstotliwość
m
. dla której
2.
częstotliwość graniczna fazy (argumentu) (warunek stabilności układu
zamkniętego:
)
oznacza częstotliwość
a
. dla której
3.
zapas fazy
określa odchylenie charakterystyki fazowej od wartości -180
o
dla
częstotliwości
m
.
4.
zapas modułu (amplitudy
) lub wielkość
określa odchylenie charakterystyki amplitudowej od wartości 0 [dB] dla częstotliwości
a
:
Pytania!!!!!!!!!!!!!!!!!!!!!
DLA JAKIEJ WARTOŚCI TRANSMITANCJI GO(S) UCHYB STATYCZNY W
STANIE USTALONYM BYŁBY ZEROWY?
UCHYB STATYCZNY (w stanie ustalonym) s, niezależnie od amplitudy
wymuszenia A byłby równy 0,
gdyby granica transmitancji układu otwartego
, gdyż:
JAKIE WŁASNOŚCI TRANSMITANCJI REGULATORA GR(S) ZAPEWNIAJĄ
ASTATYZM UKŁADU REGULACJI?
Układ astatyczny regulacji to układ w którym uchyb statyczny, czyli uchyb
ustalony przy
wymuszeniu skokowym jest równy 0. Uchyb statyczny (w stanie ustalonym) s
,byłby równy 0 jeśli
, co zaszłoby w przypadku gdyby transmitancja regulatora miała działanie
całkujące:
, czyli wystąpiłby biegun dla s=0.
Transmitancja operatorową danego elementu liniowego nazywamy stosunek
transformaty Laplacea sygnału wyjściowego do transformaty Laplacea sygnału
wejściowego, przy zerowych warunkach początkowych G(S)=Y(S)/U(S)
Macierz transmitancji: Elementami transmitancji macierzowej G(s) są transmitancje
łączące poszczególne wejścia i wyjścia (rys. poniżej):
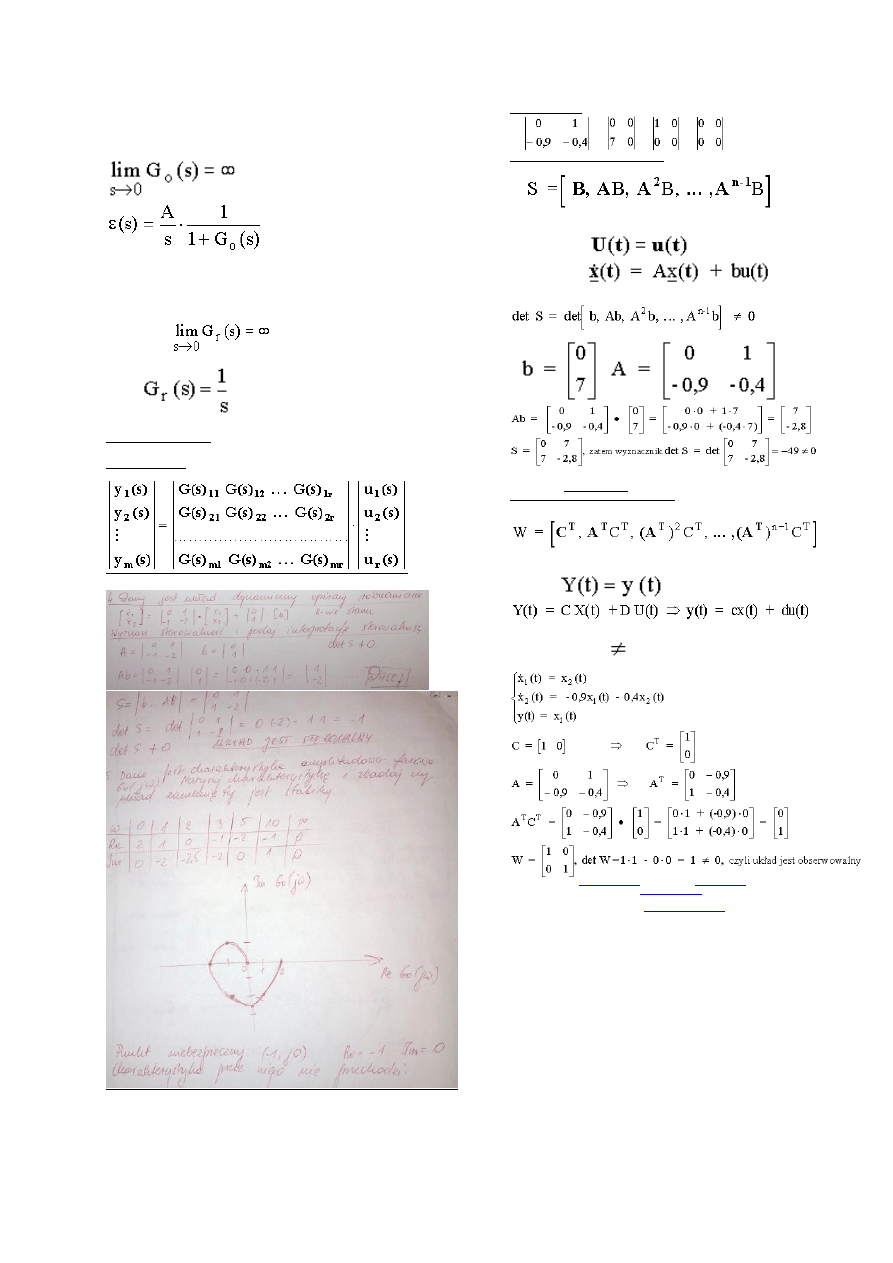
Zadanko przykłądowe
A =
, b =
, c =
, d =
Sprawdzić, czy powyższy układ jest sterowalny?
1.
Warunkiem koniecznym i dostatecznym sterowalności jest, aby macierz
była rzędu n (czyli, żeby miała n - liniowo niezależnych kolumn,
wyznacznik takiej macierzy jest różny od zera).
2.
Układ, którego sterowalność będziemy sprawdzać jest układem o jednym
wejściu
, czyli równanie stanu ma
postać:
, a
macierz S nie może być osobliwa.
3.
Układ z jednym wejściem jest sterowalny jeśli:
,
w celu wyznaczenia macierzy S określamy kolejno poszczególne macierze:
Jak widać w macierzy S występują 2 niezależne liniowo kolumny, a
wartość wyznacznika jest -49, czyli wyznacznik jest różny od 0, czyli
układ jest sterowalny.
Sprawdzić, czy powyższy układ jest obserwowalny?
1.
Warunkiem koniecznym i dostatecznym obserwowalności jest, aby
macierz
była rzędu n (czyli, żeby miała n - liniowo niezależnych kolumn).
2.
Układ, którego obserwowalność będziemy sprawdzać jest układem o
jednym wyjściu
, czyli równanie wyjścia ma postać:
,
czyli warunkiem koniecznym i wystarczającym jest, aby macierz W nie była osobliwa, jest
aby wartość wyznacznika det W
0.
3.
Obliczenia dot. obserwowalności:
Stała czasowa T – w
przez sygnał
wyjściowy, związana z czasem trwania
sygnału wejściowego.
Współczynnik wzmocnienia k – parametr
, będący stosunkiem
wartości zmiany sygnału wyjściowego do wartości zmiany sygnału wejściowego.
Wyszukiwarka
Podobne podstrony:
automatyka10001 id 73404 Nieznany
automatyka id 73112 Nieznany (2)
Automaty 2 id 72948 Nieznany (2)
automaty 3 id 72951 Nieznany (2)
Podstawy automatyki id 366718 Nieznany
AutomatykaCw5 id 73408 Nieznany (2)
AutomatykaCw8 id 73410 Nieznany (2)
Automatyka 7 id 73137 Nieznany (2)
AutomatykaWyklad01 id 73427 Nieznany (2)
AutomatykaCw4 id 73407 Nieznany (2)
automatyka10001 id 73404 Nieznany
automatyka wykl 1 id 73377 Nieznany
Automatyka nkf cyfrowe id 62906 Nieznany (2)
Automatyka i robotyzacja id 733 Nieznany
Automatyka ulog w8 id 629066 Nieznany (2)
4 2 RG Automaty skonczone id 38 Nieznany (2)
automatyka sprawko 2 id 73363 Nieznany
automatyka c2 id 73267 Nieznany (2)
Automatyka i Robotyka id 73294 Nieznany
więcej podobnych podstron