
mgr inż. Krzysztof Olejnik
1
WYKORZYSTANIE ROBOTÓW W
SPAWALNICTWIE
Część 1
•
PODSTAWOWE OKREŚLENIA I PODZIAŁ ROBOTÓW
•
UKŁADY SENSORYCZNE W ROBOTYCE
Część 2
•
ZROBOTYZOWANE STANOWISKA SPAWALNICZE
•
ZASTOSOWANIE ROBOTÓW W PRACACH SPAWALNICZYCH
•
PROBLEMATYKA BEZPIECZEŃSTWA PRACY NA STOWISKU
ZROBOTYZOWANYM
Część 3
•
UKŁADY ADAPTACYJNE W SPAWANIU
•
TECHNIKI PROGRAMOWANIA ROBOTÓW

mgr inż. Krzysztof Olejnik
2
PODSTAWOWE OKREŚLENIA I PODZIAŁ ROBOTÓW
Norma ISO 8373 wprowadza definicje pojęć i odpowiadających im
terminów dotyczących robotów i manipulatorów.
MANIPULACJA – tok czynności w przemysłowym procesie produkcyjnym,
polegający na: uchwyceniu określonego obiektu manipulacji, transportowaniu,
pozycjonowaniu lub orientowaniu tego obiektu względem przyjętej bazy, oraz
przygotowujący ten obiekt do wykonywania na nim lub za jego pomocą operacji
technologicznych.
MANIPULATOR (przemysłowy) – urządzenie przeznaczone do wspomagania lub
całkowitego zastąpienia człowieka przy wykonywaniu czynności manipulacyjnych w
przemysłowym procesie produkcyjnym, sterowane ręcznie lub automatycznie za
pomocą własnego układu sterującego stałoprogramowanego lub zewnętrznego
układu sterującego.
ROBOT (przemysłowy)
–
urządzenie automatyczne przeznaczone do
wykonywania czynności manipulacyjnych w przemysłowym procesie produkcyjnym,
mające układ ruchu składający się co najmniej z trzech zespołów ruchu i własny
układ sterujący programowalny.

mgr inż. Krzysztof Olejnik
3
PODSTAWOWE OKREŚLENIA I PODZIAŁ ROBOTÓW
Norma ISO 8373 wprowadza definicje pojęć i odpowiadających im
terminów dotyczących robotów i manipulatorów.
ROBOTYZACJA – działania mające na celu automatyzację pracy produkcyjnej za
pomocą manipulatorów i robotów.
MECHANIZACJA – polega na zastępowaniu w procesie produkcyjnym pracy
fizycznej człowieka poprzez prace maszyn.
AUTOMATYZACJA
–
zastępowanie człowieka w sterowaniu ręcznym
urządzeniami pracującymi bez bezpośredniego udziału człowieka. Urządzenia te
przejmują funkcje człowieka związane głównie z jego wysiłkiem umysłowym.
Sterowanie wykonywane przez urządzenia nazywa się sterowaniem
automatycznym. AUTOMATYZACJA wiąże się z uprzednim lub równoczesnym
wprowadzeniem MECHANIZACJI
mgr inż. Krzysztof Olejnik
4
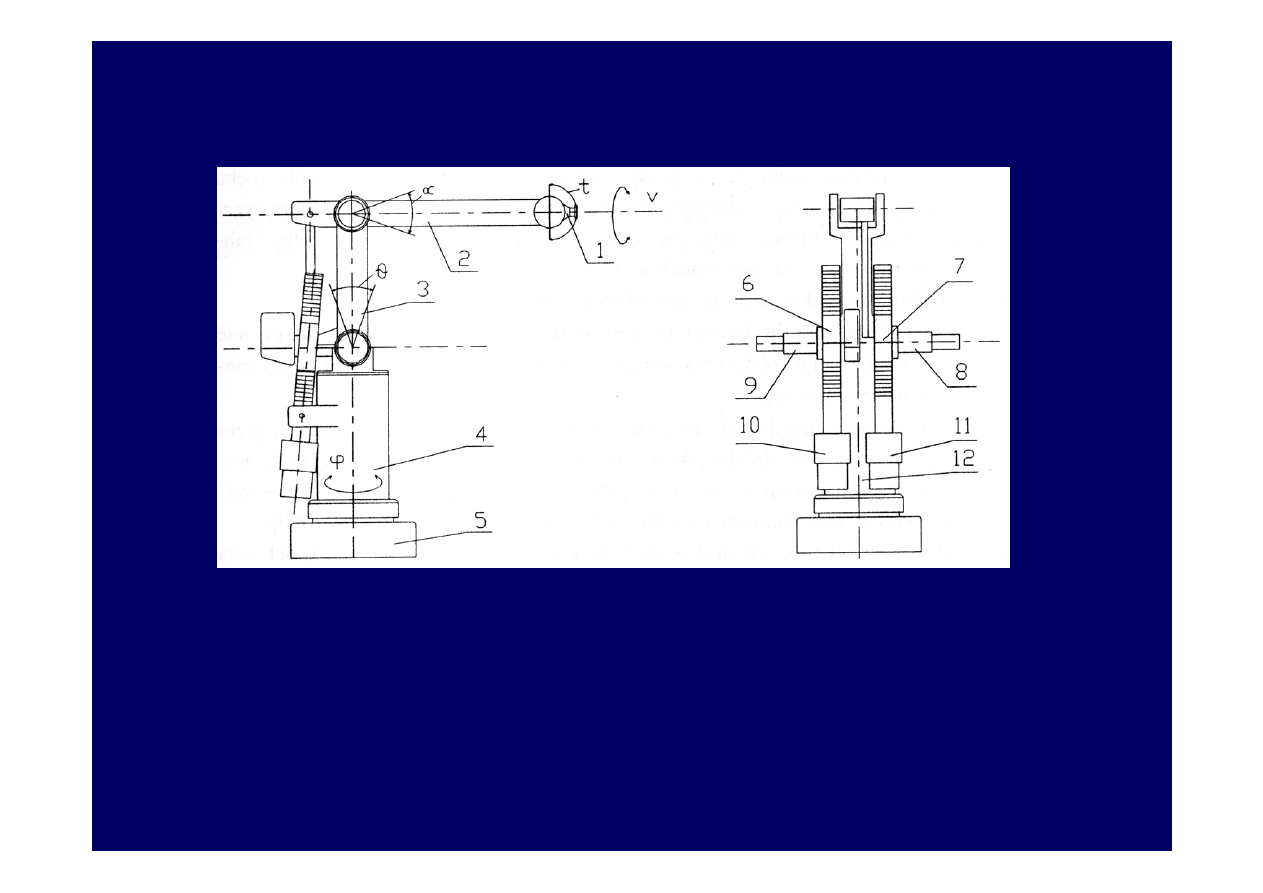
1. ELEMENTY I ZESPOŁY ROBOTÓW
1 – człon roboczy – kiść, wykonująca ruchy obrotowe w zakresie kąta t i v,
2, 3
– ramiona, wykonujące ruchy obrotowe w zakresie kąta
α i θ,
4 – korpus,
wykonujący ruch obrotowy w zakresie kąta
ϕ,
5 – podstawa
robota,
6, 7
– przekładnie śrubowe toczne do obrotu ramienia dolnego i górnego,
8, 9
– silniki napędowe członu roboczego (kości),
10, 11
– silniki napędowe przekładni śrubowych,
12 – silnik
napędzający korpus.

mgr inż. Krzysztof Olejnik
5
1. ELEMENTY I ZESPOŁY ROBOTÓW
PODSTAWA – płyta lub inna konstrukcja, która stanowi pierwszy człon układu
kinematycznego lub z którą jest połączony w sposób nieruchomy pierwszy człon
układu kinematycznego robota (manipulatora) przemysłowego.
KORPUS – element konstrukcyjny robota (manipulatora) przemysłowego
stanowiący obudowę elementów zespołów ruchu ramienia.
UKŁAD KINEMATYCZNY – układ przenoszący ruch od zespołów napędowych do
elementu roboczego, będący zbiorem członów mechanicznych połączonych
ruchowo.
UKŁAD RUCHU – układ wykonujący pożądane zmiany położenia elementu
roboczego, składający się z układu kinematycznego oraz napędów
wprowadzających w ruch odpowiednie człony układu kinematycznego.
RAMIĘ – część układu ruchu, której podstawowym zadaniem jest pozycjonowanie
przyłącza.
KIŚĆ – część układu ruchu między ramieniem a elementem roboczym, której
zadaniem jest orientowanie elementu roboczego lub wprowadzanie niewielkich
zmian jego pozycji.

mgr inż. Krzysztof Olejnik
6
1. ELEMENTY I ZESPOŁY ROBOTÓW
ZESPÓŁ RUCHU – część układu ruchu złożona z jednego napędu i członów układu
kinematycznego, których położenie względem siebie zmienia ten napęd.
MODUŁ RUCHU – zespół ruchu w postaci autonomicznej konstrukcji.
PRZYŁĄCZE ROBOTA (MANIPULATORA) PRZEMYSŁOWEGO – miejsce na
ostatnim członie układu kinematycznego robota (manipulatora) przemysłowego
przeznaczone do mocowania elementu roboczego.
ELEMENT ROBOCZY – urządzenie mocowane do przyłącza robota (manipulatora)
przemysłowego przeznaczone do chwytania i utrzymania obiektu manipulacji albo
do bezpośredniego wykonywania operacji technologicznych.
CHWYTAK – element roboczy służący do uchwycenia obiektu manipulacji
(odebrania mu liczby stopni swobody niezbędnej do wykonania czynności
manipulacyjnych), utrzymania go podczas manipulacji i uwolnieniu po jej
zakończeniu.
UKŁAD STERUJĄCY MANIPULATORA (PRZEMYSŁOWEGO) – urządzenie
manipulatora przemysłowego sterowane ręcznie lub działające automatycznie
według stałego programu, wytwarzające sygnały sterujące napędami manipulatora i
urządzeniami współpracującymi z manipulatorem.

mgr inż. Krzysztof Olejnik
7
1. ELEMENTY I ZESPOŁY ROBOTÓW
UKŁAD STERUJĄCY ROBOTA (PRZEMYSŁOWEGO) – urządzenie robota
przemysłowego działające automatycznie, przeprogramowane, wytwarzające
sygnały sterujące napędami robota i urządzeniami współpracującymi z robotem.
mgr inż. Krzysztof Olejnik
8
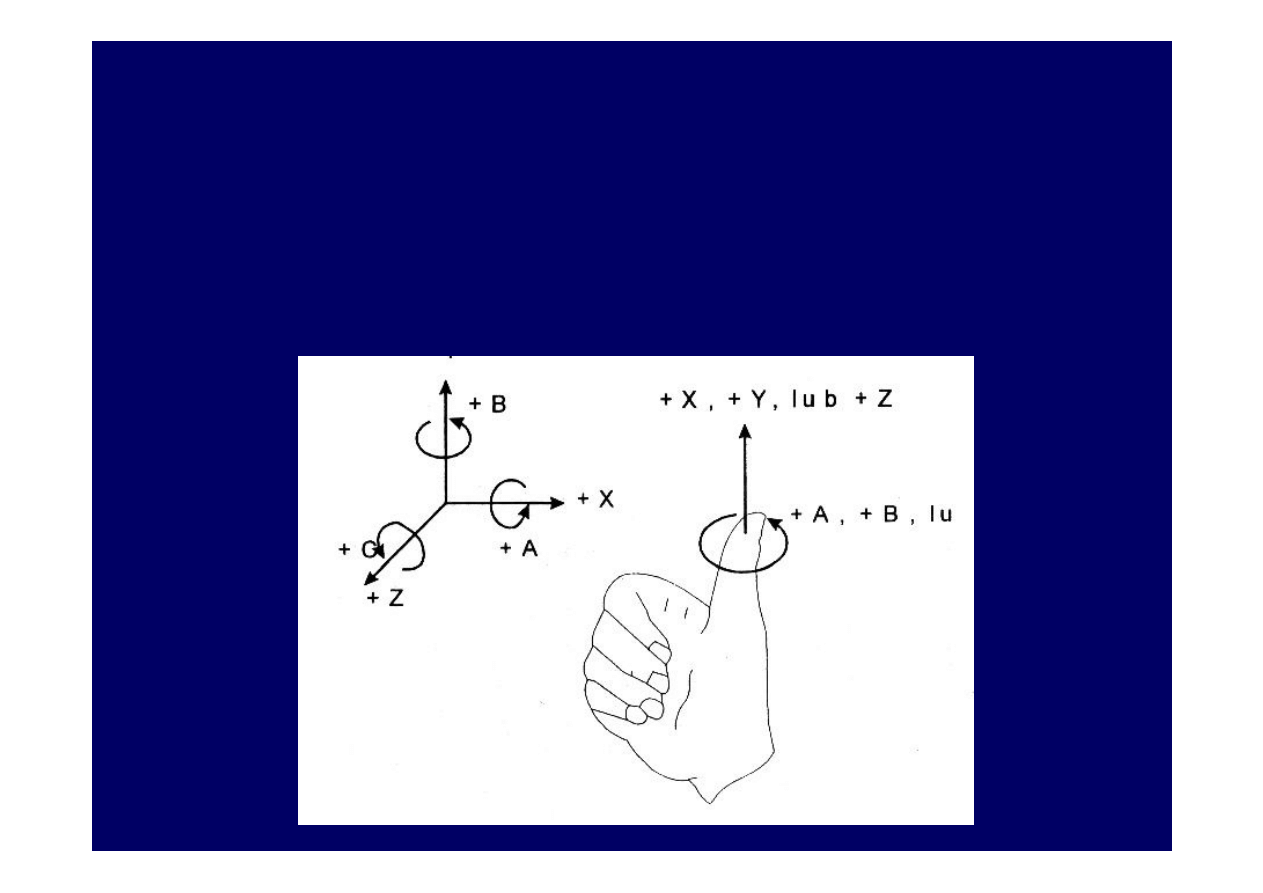
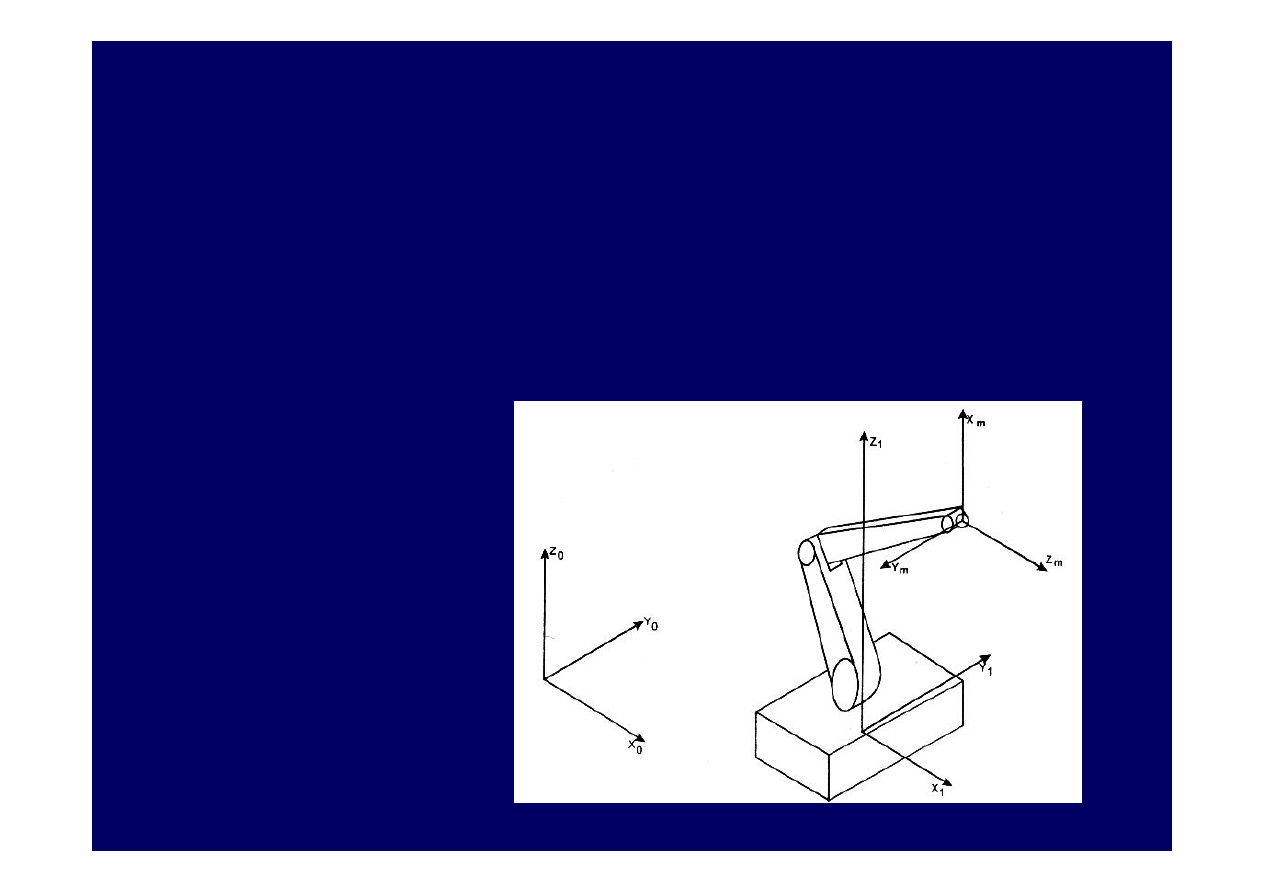
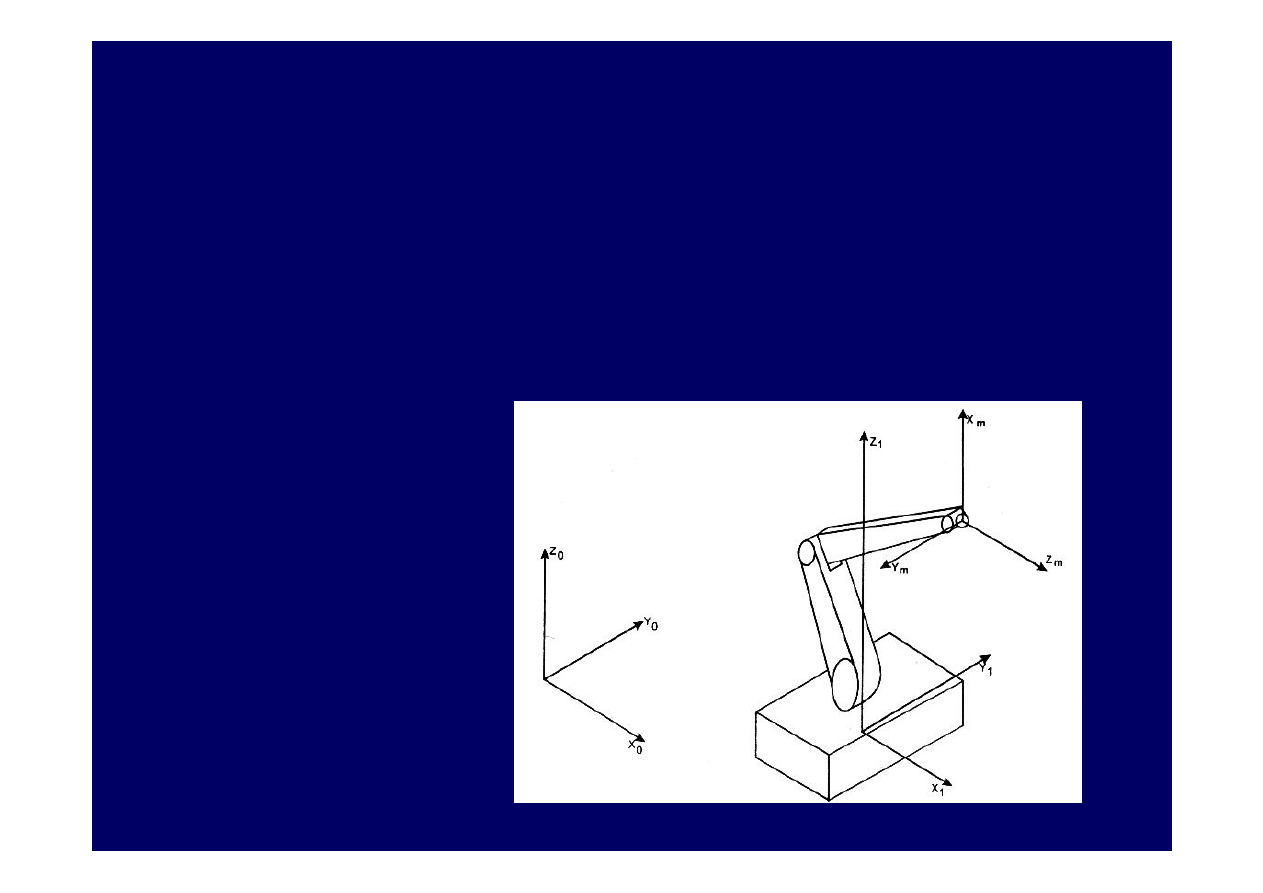
2. UKŁADY WSPÓŁRZĘDNYCH I RUCHY
Układy współrzędnych stosowane do robotów przemysłowych przyjęto
zgodnie z EN 29787.
Zgodnie z normą, wszystkie układy współrzędnych są układami prawo skrętnymi. A,
B, C określają ruchy obrotowe, odpowiednio wokół osi X, Y, Z.
mgr inż. Krzysztof Olejnik
9
2. UKŁADY WSPÓŁRZĘDNYCH I RUCHY
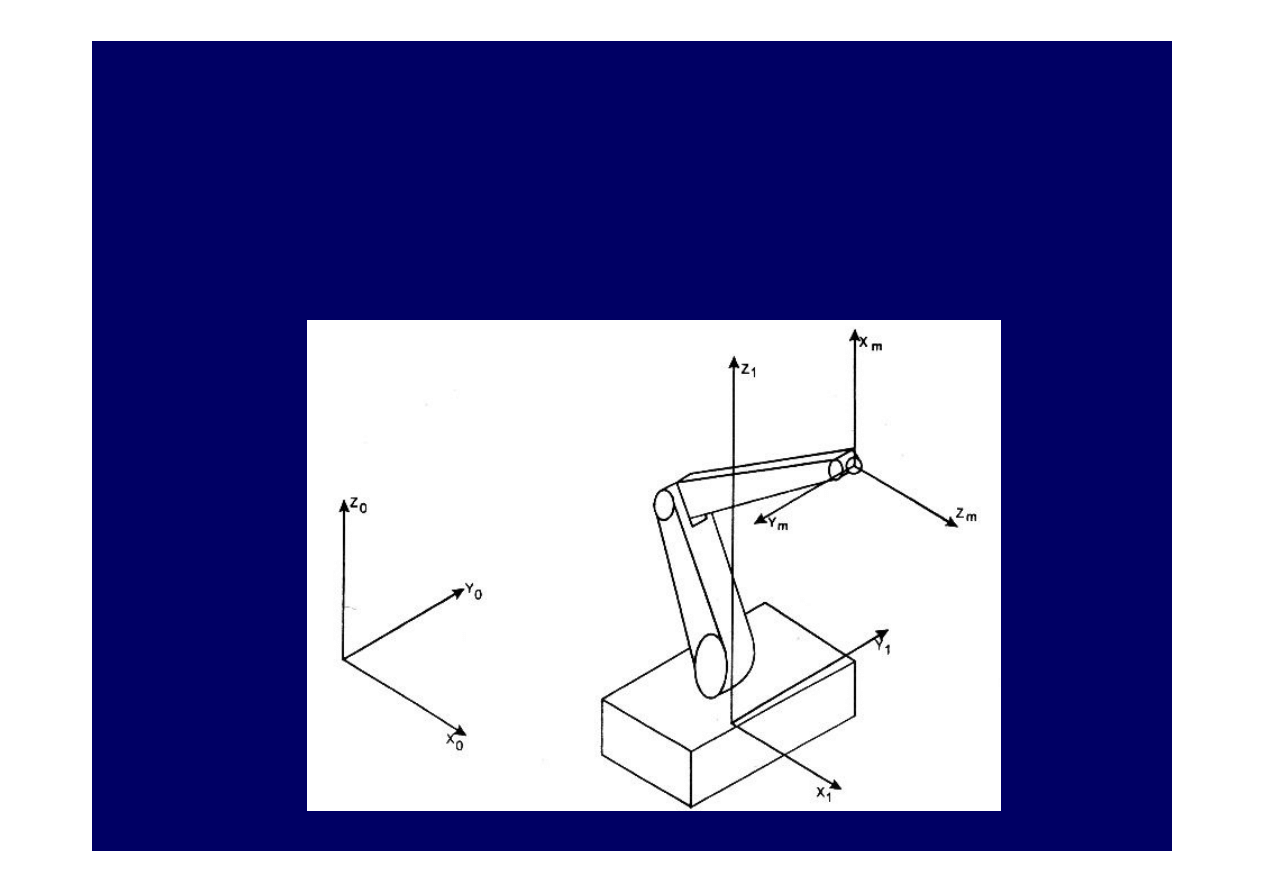
Określa się trzy podstawowe układy współrzędnych:
• Globalny,
• Podstawowy,
• Interfejsu mechanicznego
mgr inż. Krzysztof Olejnik
10
2. UKŁADY WSPÓŁRZĘDNYCH I RUCHY
GLOBALNY UKŁAD WSPÓŁRZĘDNYCH
Oznaczenie: X
0
– Y
0
– Z
0
Początek globalnego układu współrzędnych jest określany przez użytkownika,
stosownie do jego wymagań. Kierunek osi +Z
0
jest zgodny, a zwrot jest przeciwny
do wektora przyspieszenia ziemskiego. Oś +X
0
jest określona poprzez użytkownika,
stosownie do jego wymagań.
mgr inż. Krzysztof Olejnik
11
2. UKŁADY WSPÓŁRZĘDNYCH I RUCHY
PODSTAWOWY UKŁAD WSPÓŁRZĘDNYCH
Oznaczenie: X
1
– Y
1
– Z
1
Początek podstawowego układu współrzędnych powinien być określony przez
producenta robota. Kierunek osi +Z
1
jest zgodny z manipulatorem robota, a jej
zwrot jest skierowany od powierzchni mocowania robota. Zwrot osi +X
1
jest
skierowany od początku układu współrzędnych i przechodzi przez rzut środka
przestrzeni roboczej.
mgr inż. Krzysztof Olejnik
12
2. UKŁADY WSPÓŁRZĘDNYCH I RUCHY
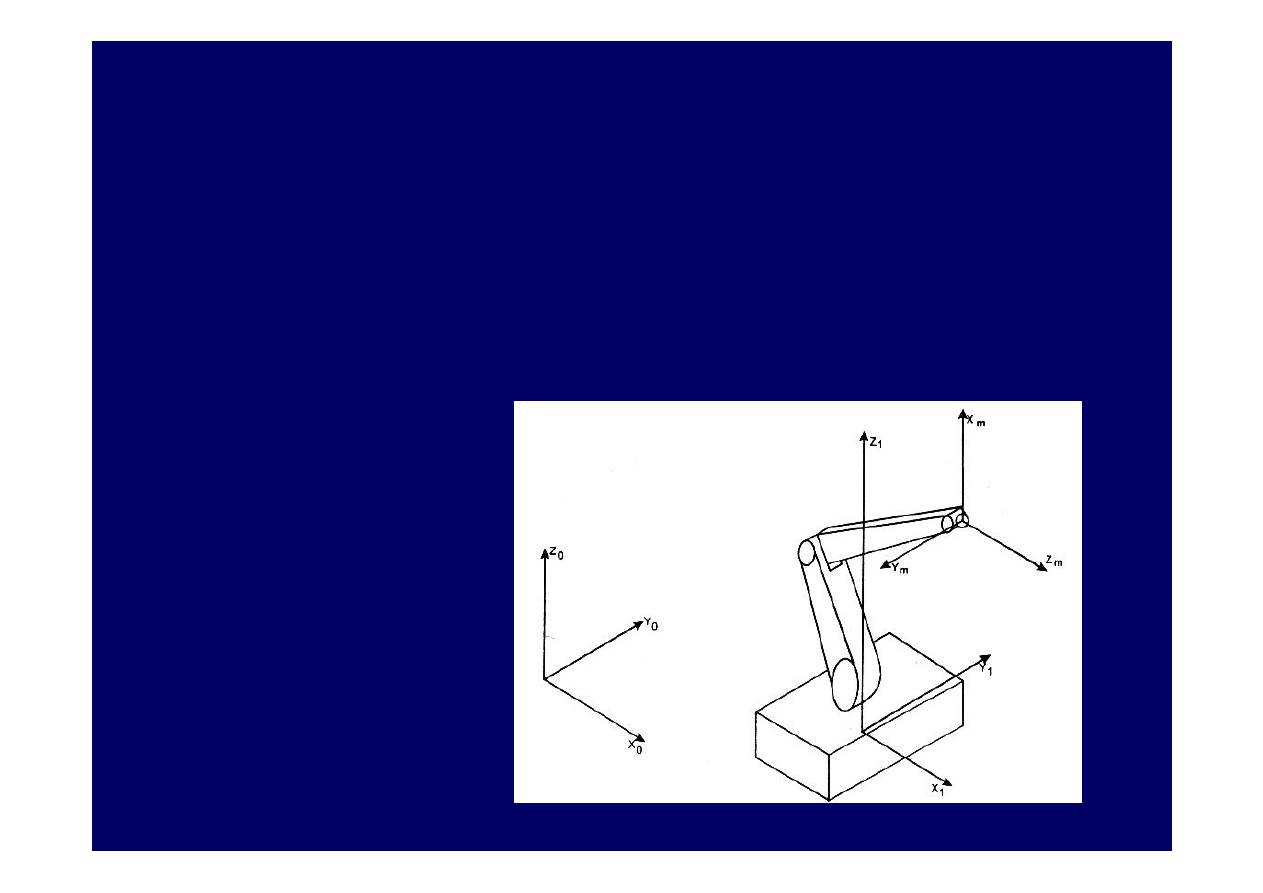
UKŁAD WSPÓŁRZĘDNYCH INTERFEJSU MECHANICZNEGO
Oznaczenie: X
m
– Y
m
– Z
m
[ m=liczba osi robota ].
Początkiem układu współrzędnych jest środek interfejsu mechanicznego robota.
Zwrot +Z
m
jest skierowany od interfejsu mechanicznego robota do elementu
roboczego. Oś +X
m
określa przecięcie płaszczyzny interfejsu mechanicznego
robota z płaszczyzną X
1
Z
1
(albo płaszczyzną równoległą do X
1
Z
1
).

mgr inż. Krzysztof Olejnik
13
3. RODZAJE ROBOTÓW I MANIPULATORÓW
PRZEMYSŁOWYCH
Norma ISO 8373 dzieli roboty i manipulatory przemysłowe na:
Manipulator (przemysłowy) ręczny
Serwomanipulator
Telemanipulator
Manipulator (przemysłowy) automatyczny
Robot (manipulator) przemysłowy:
- stacjonarny
- mobilny
- monolityczny
- modułowy
- konsolowy
- portalowy
- suwnicowy
- bramowy
- kartezjański
- cylindryczny
- sferyczny
- przegubowy
- typu SCARA
- lekki
- średni
- ciężki
- bardzo ciężki

mgr inż. Krzysztof Olejnik
14
3. RODZAJE ROBOTÓW I MANIPULATORÓW
PRZEMYSŁOWYCH
Klasyfikacja robotów przemysłowych wg przeglądu IRF z 1997 roku:
1.
Klasyfikacja ze względu na liczbę osi:
•
wszystkie roboty z trzema osiami i więcej,
•
roboty z 4 osiami,
•
roboty z 5 osiami lub więcej,
2.
Klasyfikacja ze względu na rodzaj sterowania
•
roboty sekwencyjne (ang. sequence-controlled robots)
•
roboty realizujące zadaną trajektorię (ang. trajektory-operated robots)
•
Playback
•
CNC,CP
•
roboty adaptacyjne (ang. adaptive robots)
•
teleoperator (ang. teleoperated robots)
mgr inż. Krzysztof Olejnik
15
3. RODZAJE ROBOTÓW I MANIPULATORÓW
PRZEMYSŁOWYCH
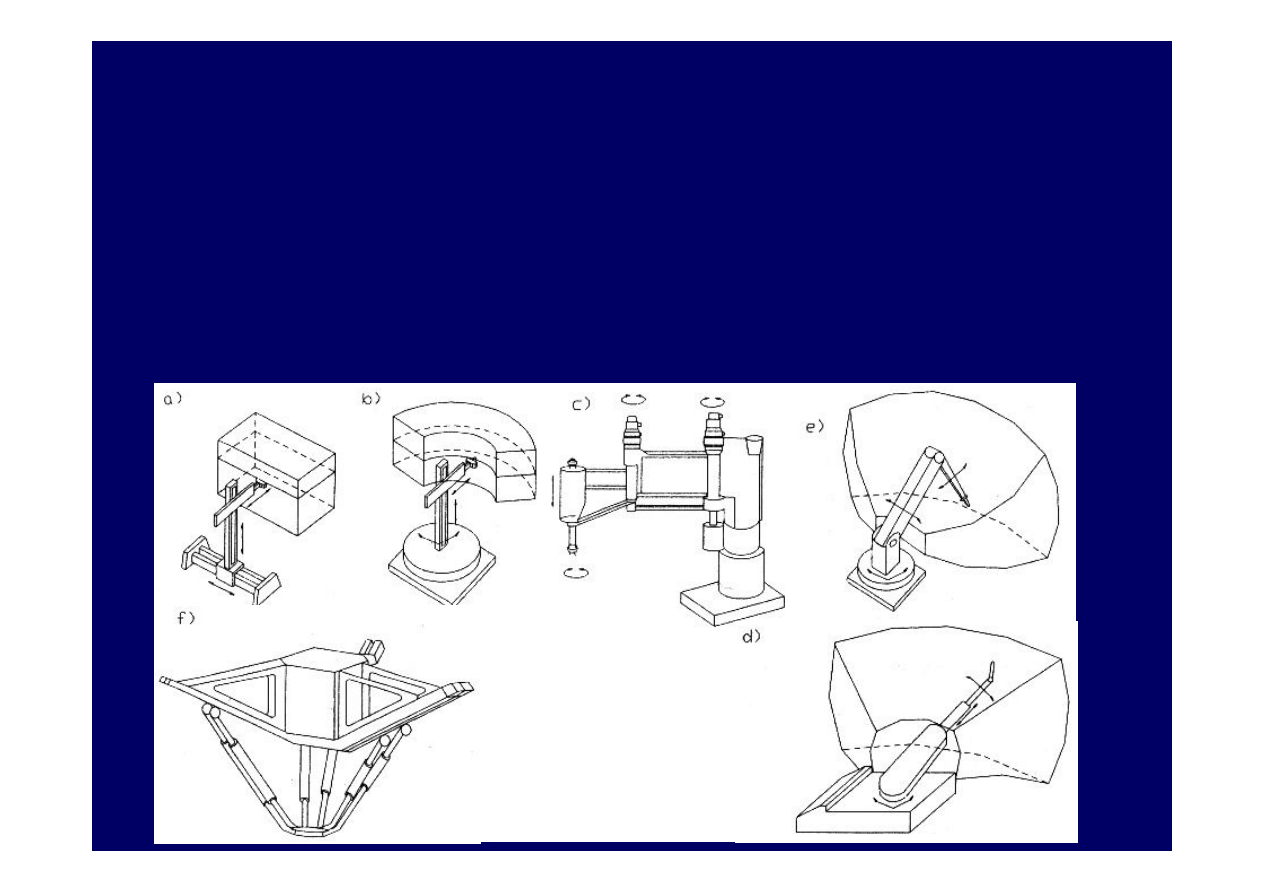
3.
Klasyfikacja ze względu na strukturę mechaniczną:
•
roboty kartezjańskie i portalowe (ang. cartesian and gantry robots) (a)
•
SCARA (c)
•
roboty przegubowe (ang. articulated robots) (e)
•
roboty równoległe (ang. parallel robots) (f)
•
roboty sferyczne, cylindryczne (ang. Spherical,cylindrical robots) (d,b)

mgr inż. Krzysztof Olejnik
16
4. CHARAKTERYSTYKI FUNKCJONALNE ROBOTÓW
PRZEMYSŁOWYCH
W dokumentacji towarzyszącej producent powinien podać odpowiednie
informacje dotyczące różnych charakterystyk robota.
•
podstawowe rodzaje zastosowań,
•
wymagane źródła zasilania,
•
rodzaj manipulatora robota i liczba osi,
•
układy współrzędnych (podstawowy i interfejsu mechanicznego robota),
•
wymiary zewnętrzne i masa manipulatora robota i układu sterowania,
•
sposób mocowania robota,
•
opis interfejsu mechanicznego robota,
•
specyfikacja układu sterowania,
•
sposób programowania,
•
dopuszczalne warunki środowiskowe,
•
parametry dotyczące możliwości obciążania robota,
•
prędkości,
•
charakterystyki funkcjonalne.
mgr inż. Krzysztof Olejnik
17
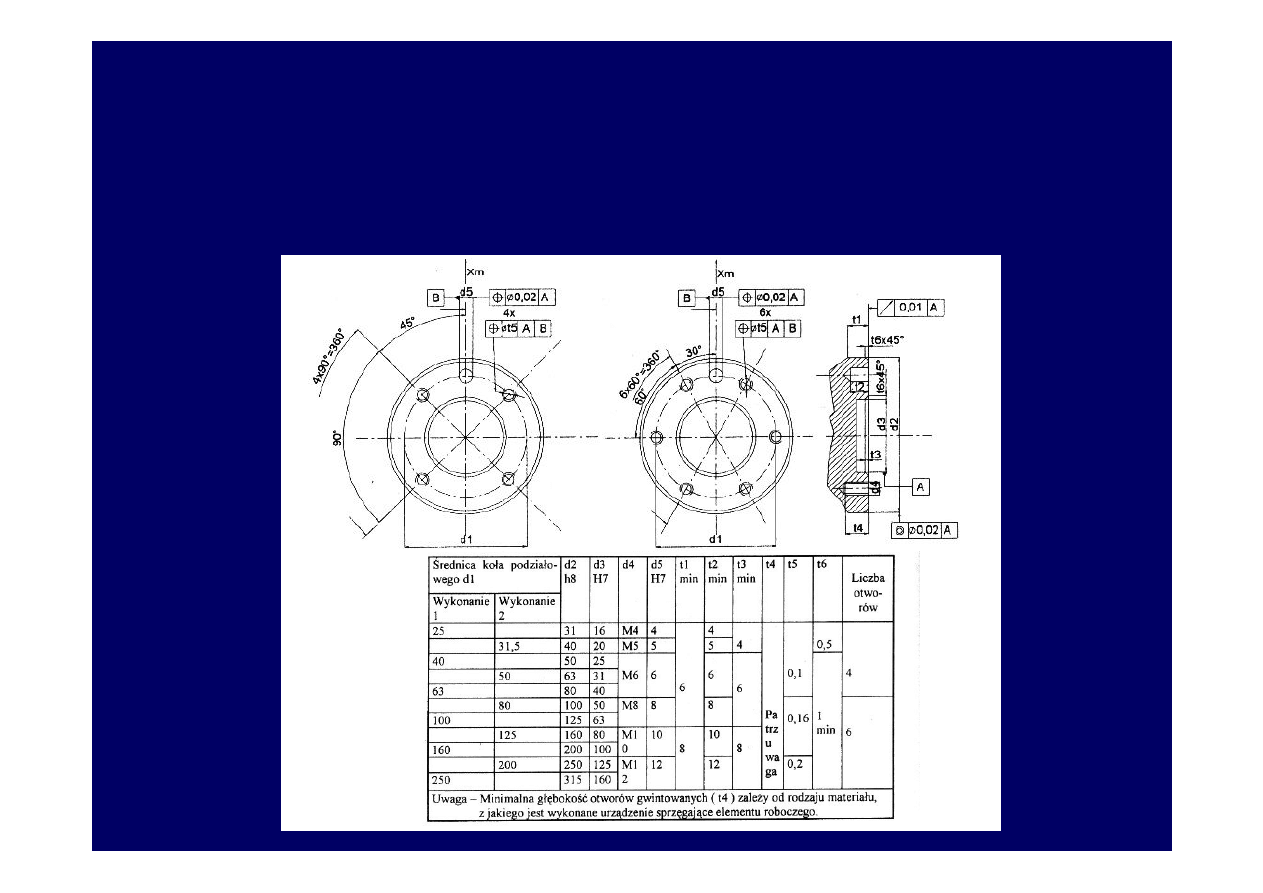
5. INTERFEJSY MECHANICZNE
Zakończenie mechaniczne kiści robota jest określone normą PN-EN 29409.
Zaleca się stosowanie wymiarów interfejsu mechanicznego wg tablicy.

mgr inż. Krzysztof Olejnik
18
UKŁADY SENSORYCZNE W ROBOTYCE
Sensory taktylne przeznaczone są do zbierania informacji o bezpośrednim
(dotykowym) otoczeniu robota, a w szczególności o położeniu, orientacji i kształcie
obiektu manipulacji. Sensory taktylne mogą przekazywać nie tylko informacje o
kontakcie z otoczeniem, mogą również dokonywać pomiaru wartości i kierunku siły
w obszarze styku. Sygnały z czujników są wykorzystywane przede wszystkim do
kształtowania trajektorii ramienia robota przy wypełnieniu zadań montażowych, a
także przy operowaniu narzędziami obróbkowymi.

mgr inż. Krzysztof Olejnik
19
UKŁADY SENSORYCZNE W ROBOTYCE
TYPOWE ZADANIA URZĄDZEŃ I UKŁADÓW TAKTYLNYCH ZWIĄZANE SĄ Z:
1.
pomiarami i sterowaniem parametrami:
•
chwytania, w przypadku wykonywania przez robota zadań transportowych,
•
obróbki, w przypadku wykonywania przez robota zadań technologicznych,
2.
rozpoznawania obiektu manipulacji, w tym:
•
wykrywanie obecności obiektu,
•
rozpoznawanie położenia i zorientowania obiektu,
•
rozpoznawanie kształtu,
3.
pomiarami i sterowaniem umiejscowienia obiektu manipulacji.
ZE WZGLĘDU NA SPEŁNIONE ZADANIA SYGNAŁY Z SENSORÓW MOŻNA
PODZIELIĆ NA:
¾
sygnały nadzoru przebiegu pracy i przestrzeni roboczej, które powodują przerwę w
realizacji bieżącej programu i stosownie do przekazanego sygnału powodują
zadziałanie odpowiednich funkcji specjalnych,
¾
dane do statycznej korekty programu, które odnoszą się zarówno do odstępstw od
położenia i orientacji przedmiotu, jak również do tolerancji wymiarów przedmiotów,
¾
dane do dynamicznej korekty programu, które są tworzone na podstawie odchyłek
od toru, jakie powstają podczas realizacji programu.

mgr inż. Krzysztof Olejnik
20
1. SIŁOWE SENSORY TAKTYLNE
Do budowy siłowych sensorów taktylnych wykorzystuje się zarówno materiały o
różnych właściwościach, jak i różne metody wykrywania działających sił. Materiał
stosowany w czujniku powinien charakteryzować się następującymi cechami:
zmiennością oporu wraz ze zmianą naprężeń w poszczególnych
punktach całej tablicy,
minimalnym oporem
dobrą powtarzalnością,
małą histerezą
odpornością na zmęczenie
stałością charakterystyki.
mgr inż. Krzysztof Olejnik
21
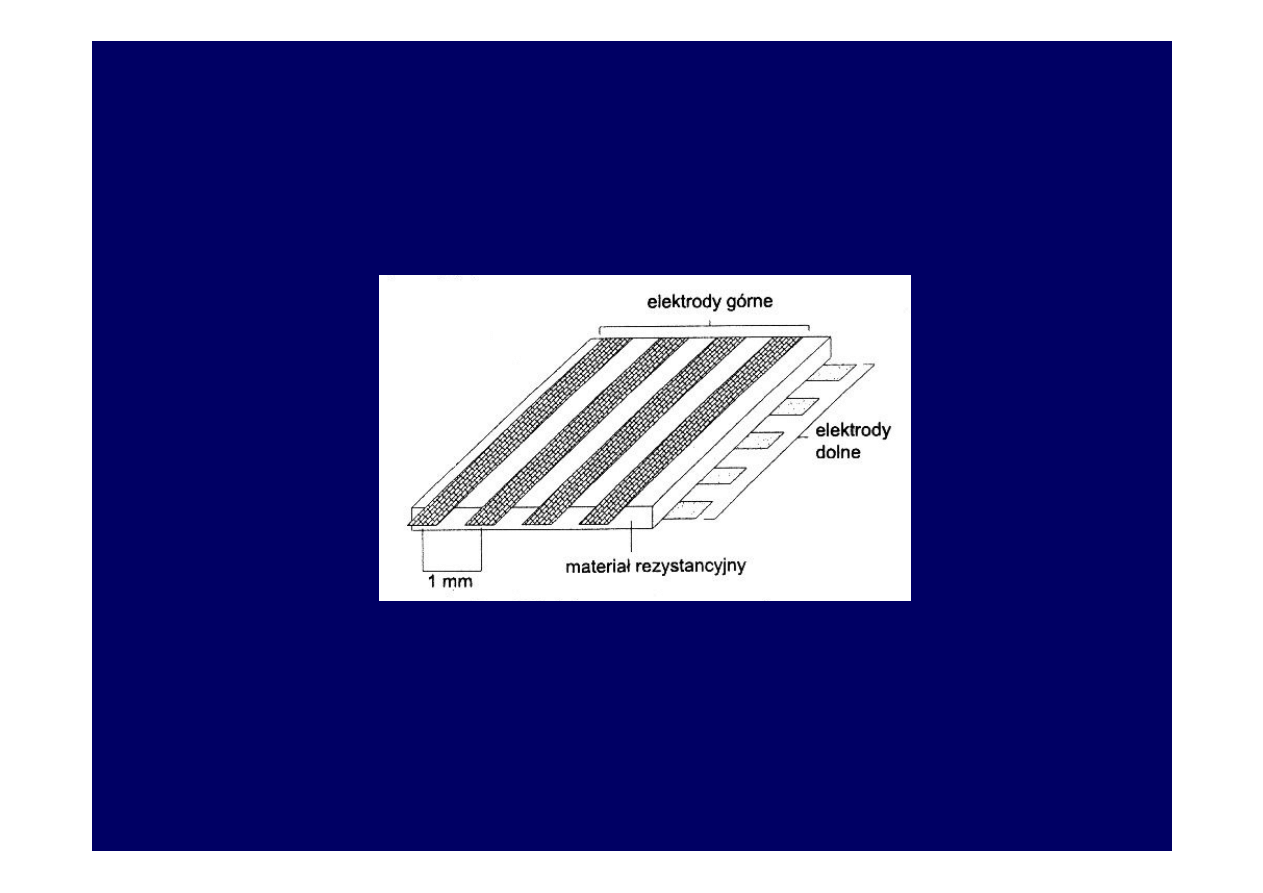
1. SIŁOWE SENSORY TAKTYLNE
Podstawowa konfiguracja matrycy oporowej.
Elektrody ułożone są w dwóch równoległych płaszczyznach w kierunkach
prostopadłych do siebie. Płaszczyzny elektrod oddzielone są od siebie
piezorezystancyjnym materiałem. Pojedynczy punkt pomiarowy matrycy
definiowany jest na przecięciu prostopadłych elektrod, znajdujących się na dwóch
płaszczyznach.
mgr inż. Krzysztof Olejnik
22
1. SIŁOWE SENSORY TAKTYLNE
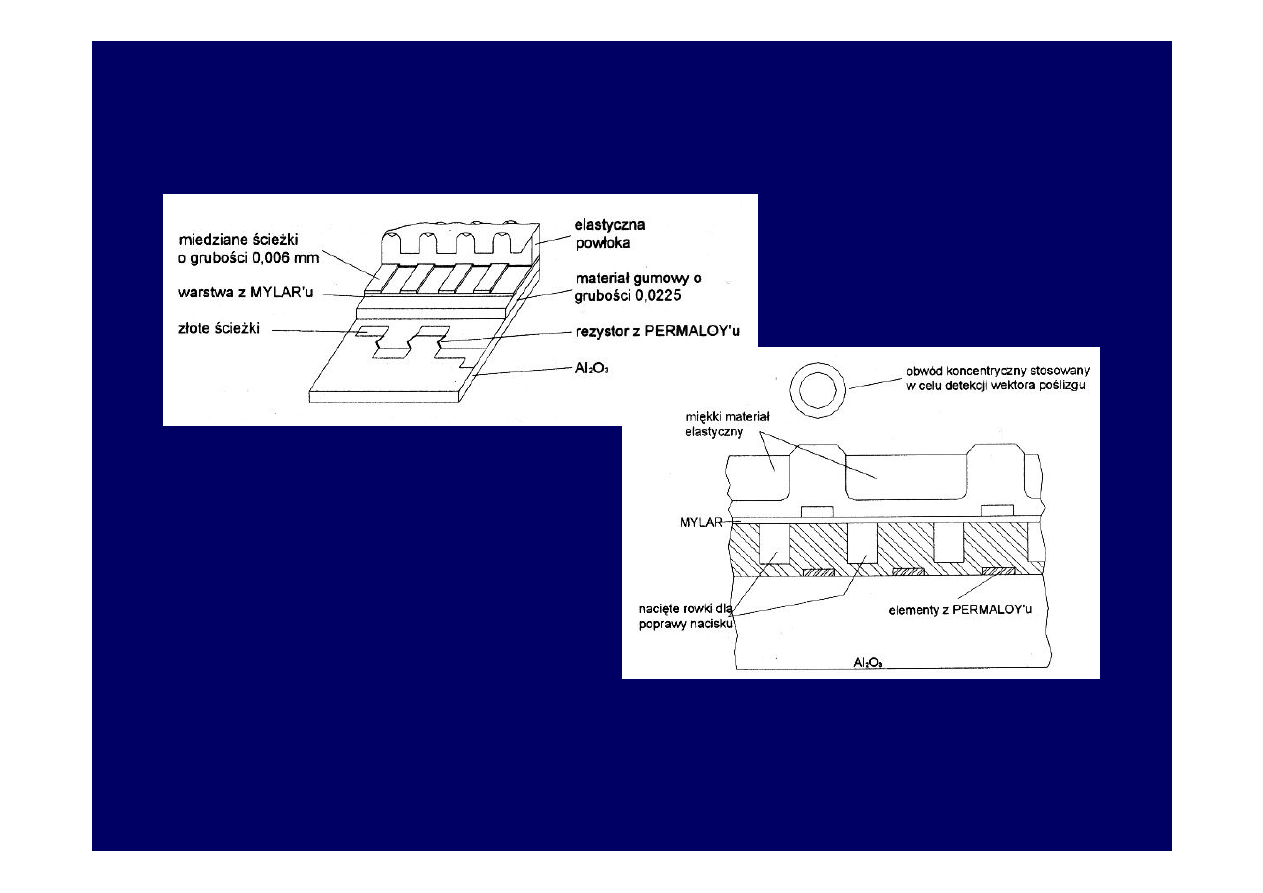
Magnetyczno-rezystancyjny sensor taktylny.
W sensorach taktylnych magnetorezystancyjnych wykorzystana jest zasada
magnetostrykcji, polegająca na występowaniu zjawiska zmiany pola
magnetycznego podczas przyłożenia zewnętrznego obciążenia (ściskania lub
rozciągania) na ten materiał.
mgr inż. Krzysztof Olejnik
23
1. SIŁOWE SENSORY TAKTYLNE
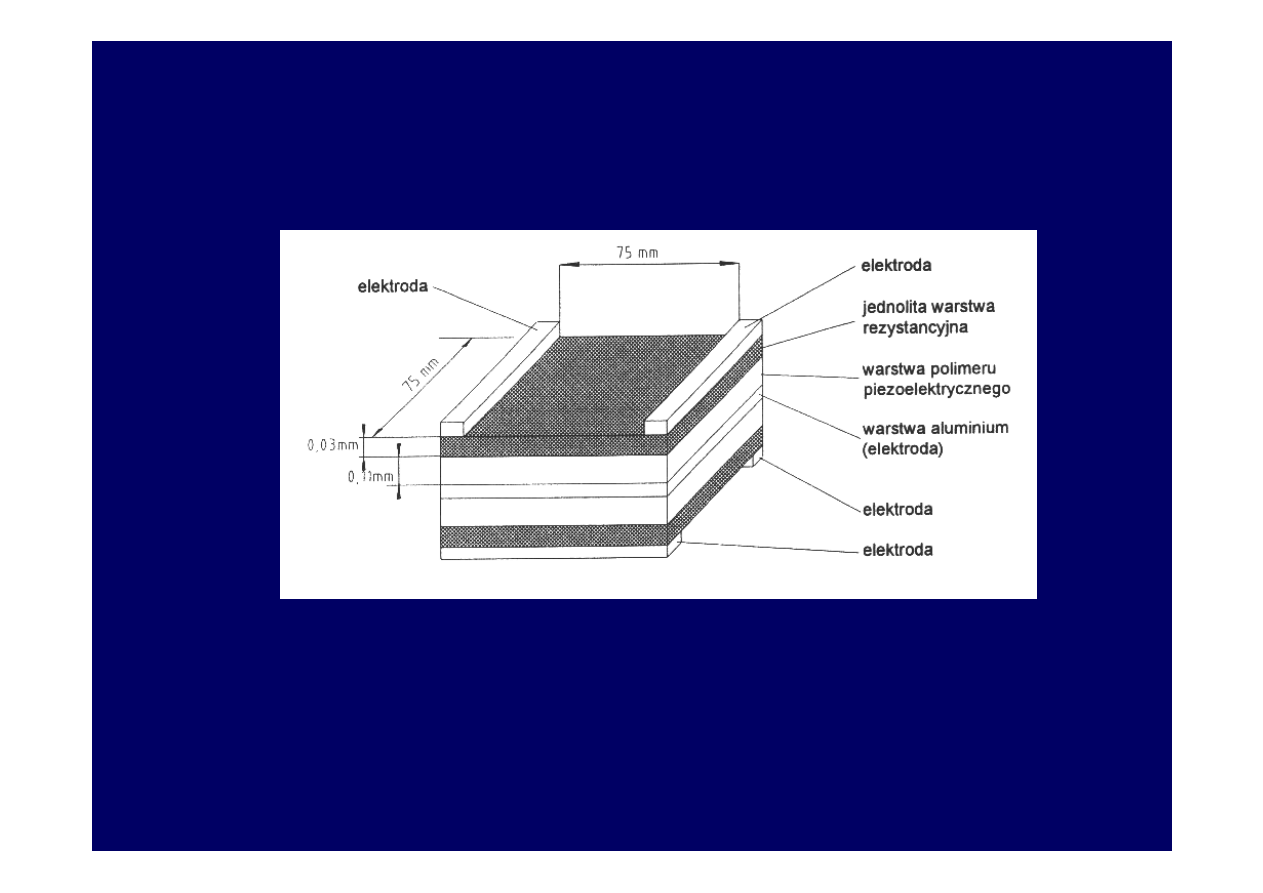
Sensory taktylne z warstwą piezoelektryczną.
Konstrukcja opiera się na materiale piezoelektrycznym który wytwarza ładunek
elektryczny na skutek mechanicznego nacisku.
Zastosowanie efektu piezoelektrycznego w czujnikach taktylnych stosowanych w
chwytakach ogranicza się do sytuacji, w której części manipulowane szybko są
chwytane, transportowane i pozycjonowane (ze względu na występowanie błędów
zmiennych w czasie).
mgr inż. Krzysztof Olejnik
24
2. SENSORY TAKTYLNE PRZEMIESZCZENIOWE
Dotknięcie sensorem obiektu i określenie siły nacisku można również realizować
poprzez pomiar odkształceń, posługując się czujnikami przemieszczenia.
Dokładność pomiaru siły zależna jest od właściwości elastycznych materiału, z
którego wykonany jest czujnik i od dokładności wykonania przetworników.
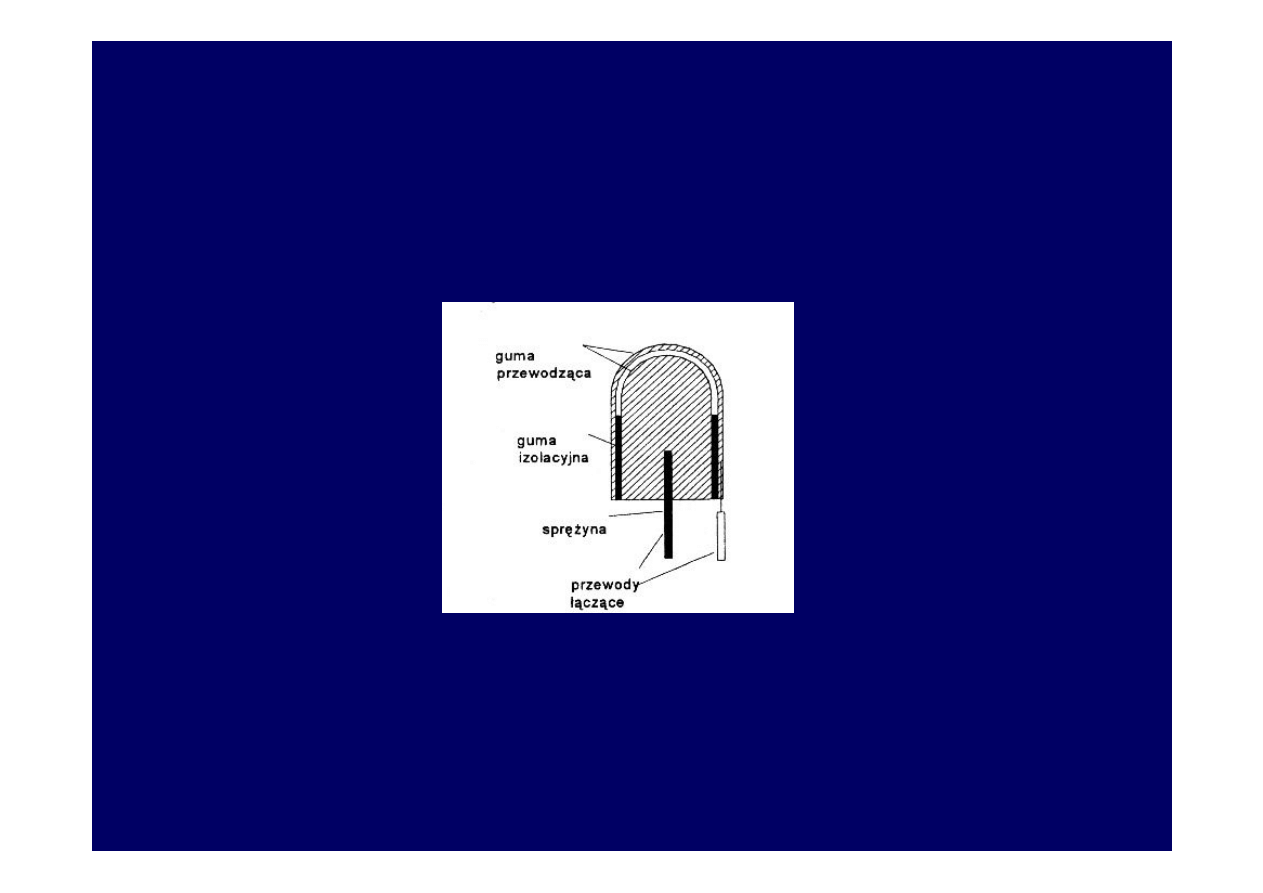
Sensor taktylny z kulistym zakończeniem które składa się z dwóch warstw
przewodzącej gumy, oddzielonych warstwą powietrza. Siła pojawiająca się podczas
dotknięcia czujnikiem obiektu powoduje odkształcenie warstwy powierzchniowej i
zaistnienie kontaktu obu przewodzących warstw gumy.
mgr inż. Krzysztof Olejnik
25
2. SENSORY TAKTYLNE PRZEMIESZCZENIOWE
Sensor taktylny z czujnikiem termicznym i źródłem ciepła w postaci rezystorów.
Jeżeli czujnik termiczny dotknie zewnętrznego obiektu, to temperatura czujnika
obniży się na skutek transmisji ciepła.
mgr inż. Krzysztof Olejnik
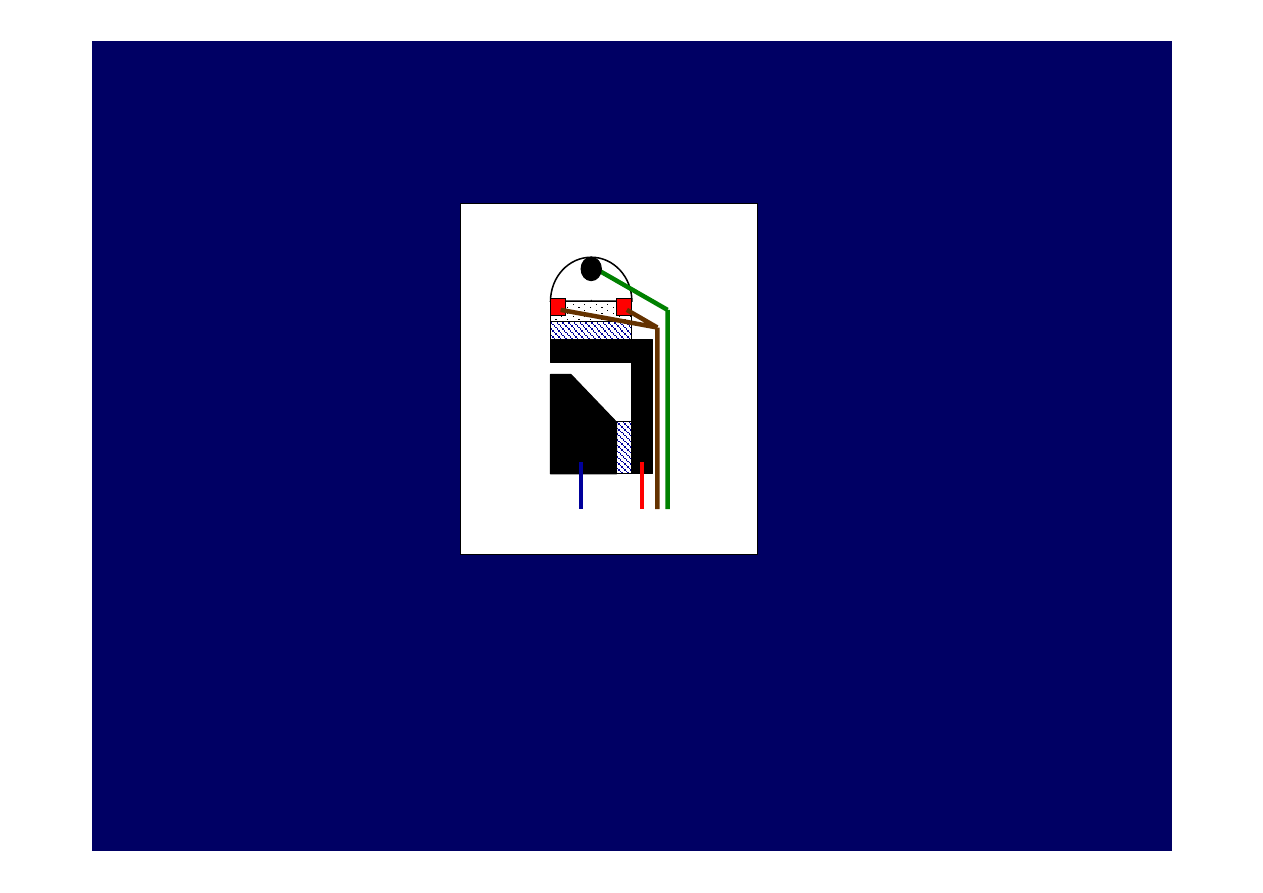
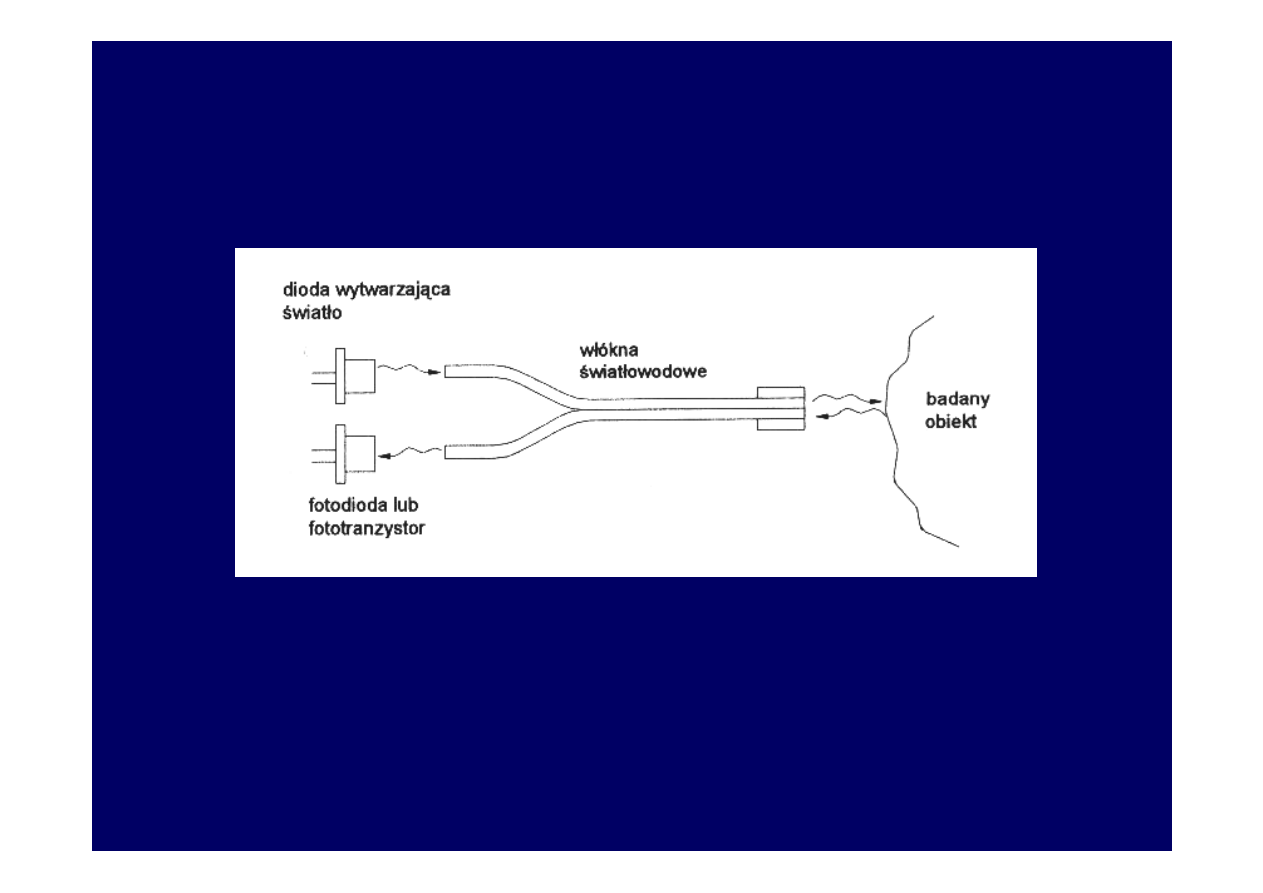
26
3. SENSORY OPTYCZNE
Optoelektroniczny czujnik taktylny oparty na detekcji światła odbitego od badanej
powierzchni..
mgr inż. Krzysztof Olejnik
27
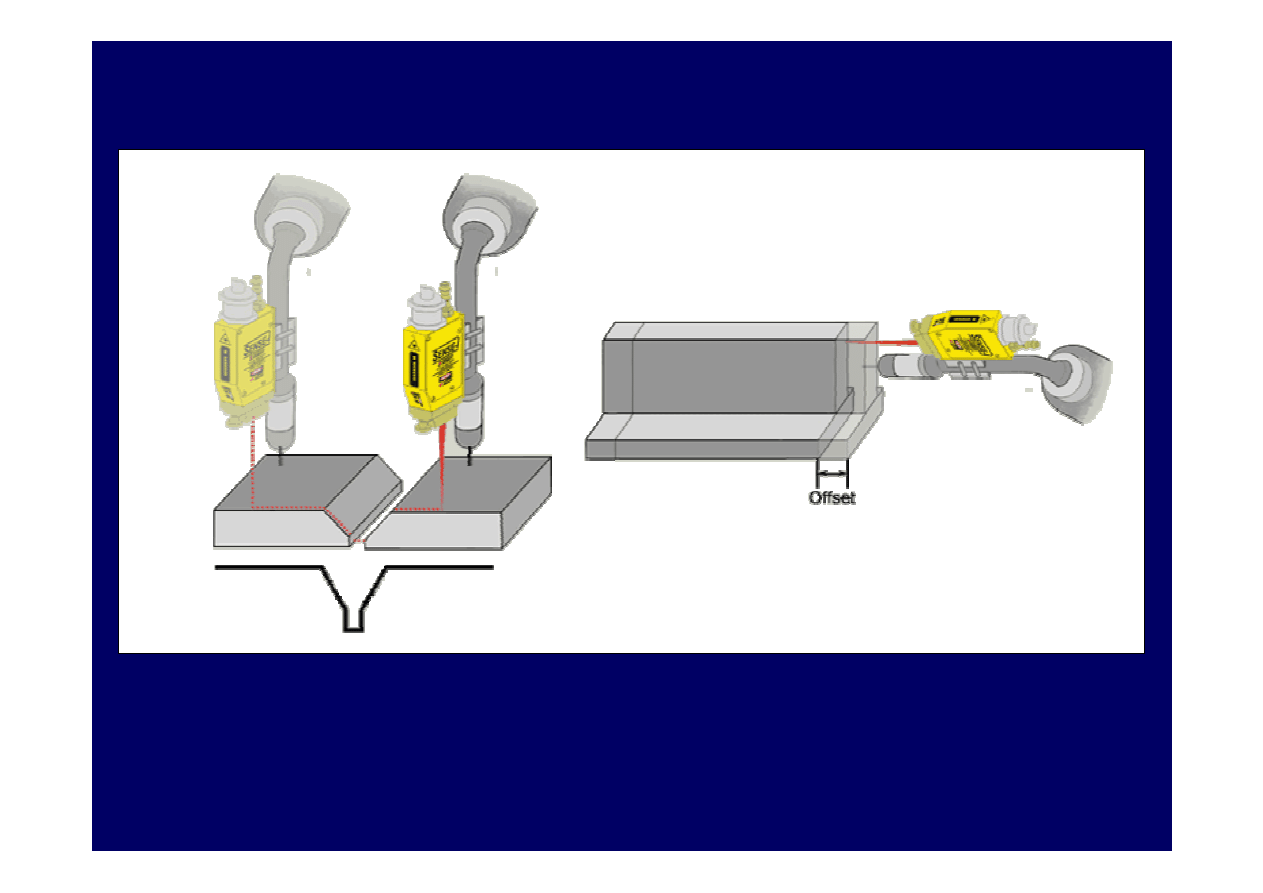
4. SENSORY OPTYCZNE LASEROWE
Laserowy czujnik odległości
mgr inż. Krzysztof Olejnik
28
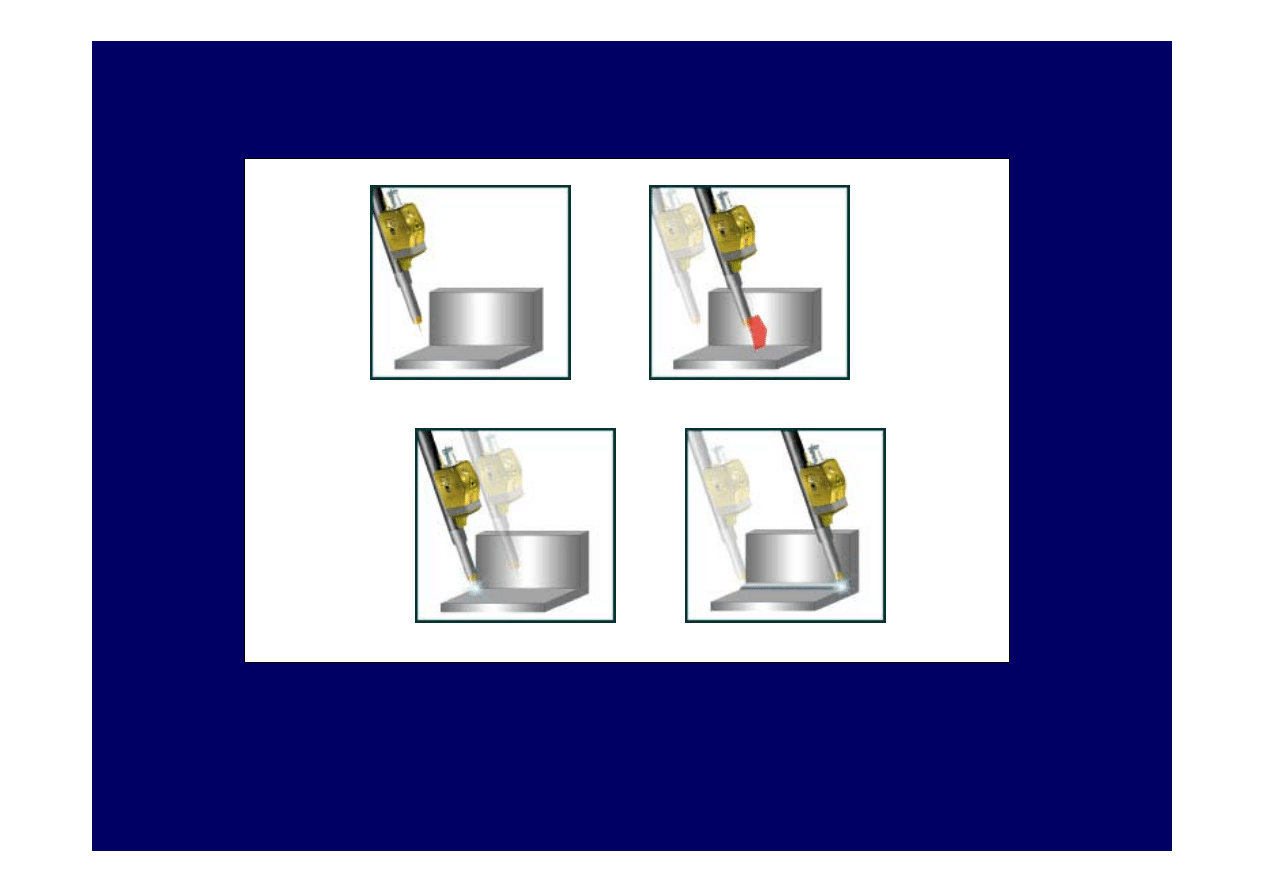
4. SENSORY OPTYCZNE LASEROWE
Etapy postępowania przy wykorzystaniu laserowego czujnika odległości.
mgr inż. Krzysztof Olejnik
29
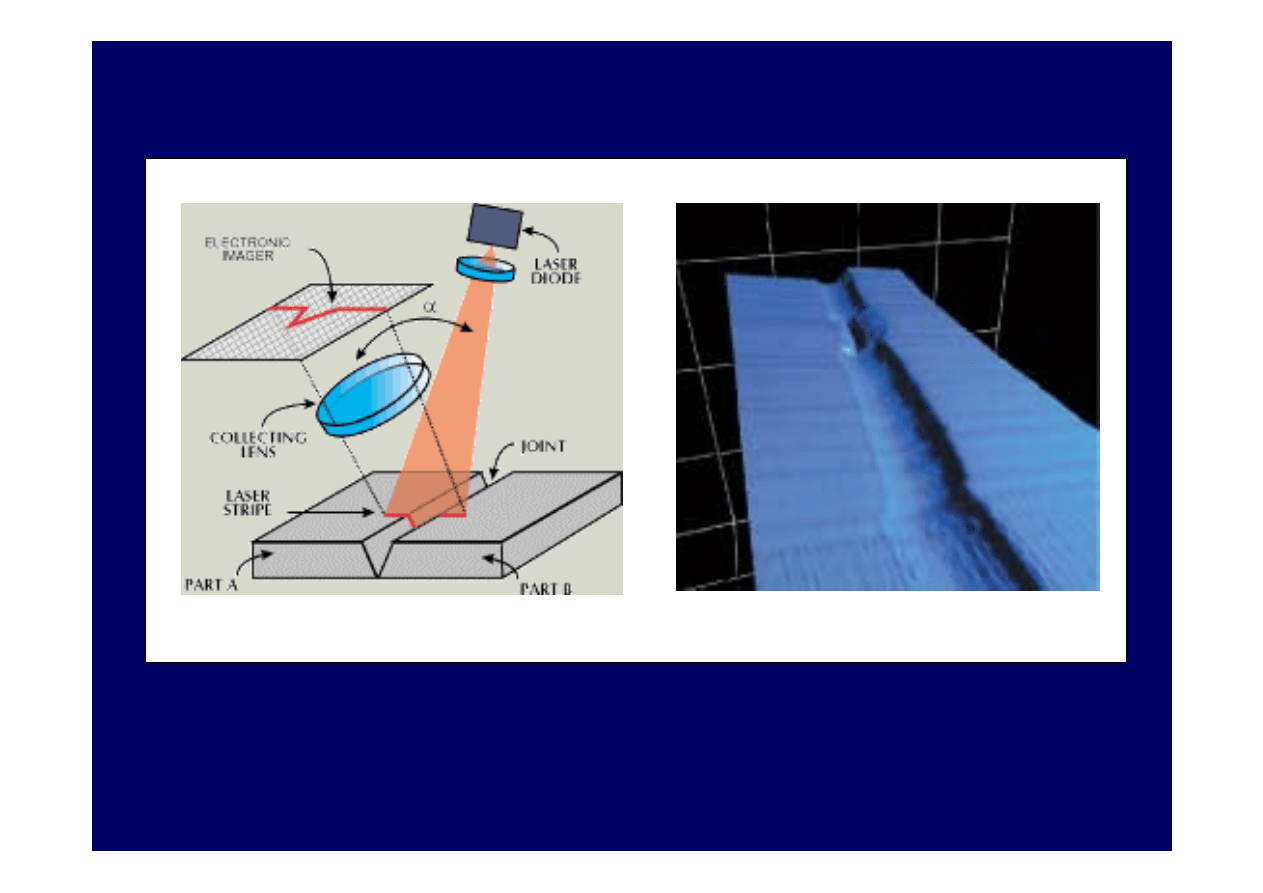
4. SENSORY WIZYJNE
Schemat działania sensora wizyjnego pozwalającego wygenerować trójwymiarowe
odzwierciedlenie rowka spawalniczego.
mgr inż. Krzysztof Olejnik
30
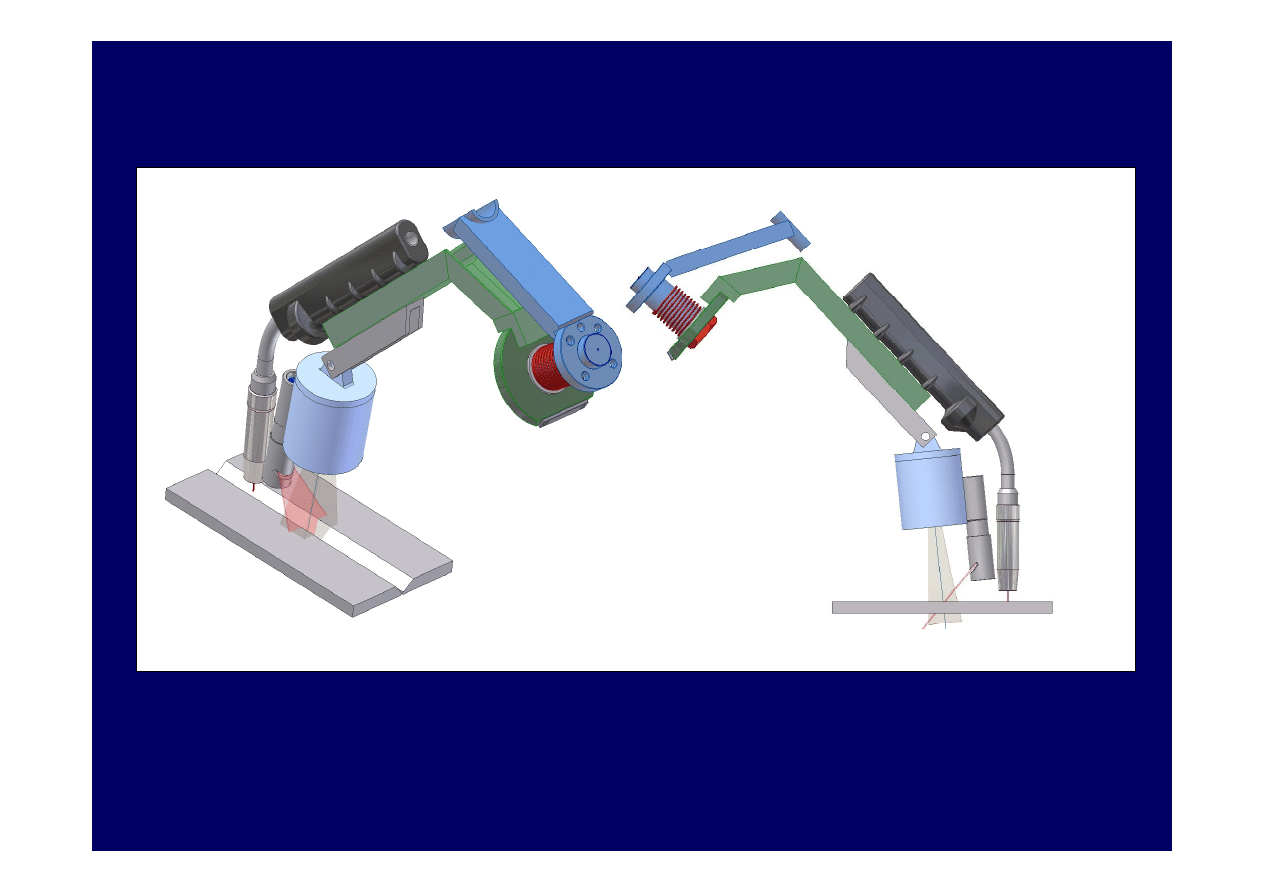
4. SENSORY WIZYJNE
System wizyjny składający się z kamery i oświetlenia wiązka lasera o odpowiednim
kształcie.

mgr inż. Krzysztof Olejnik
31
4. SENSORY WIZYJNE
Przykład zastosowania laserowego sensora wizyjnego do lokalizowania krawędzi
blachy.
mgr inż. Krzysztof Olejnik
32
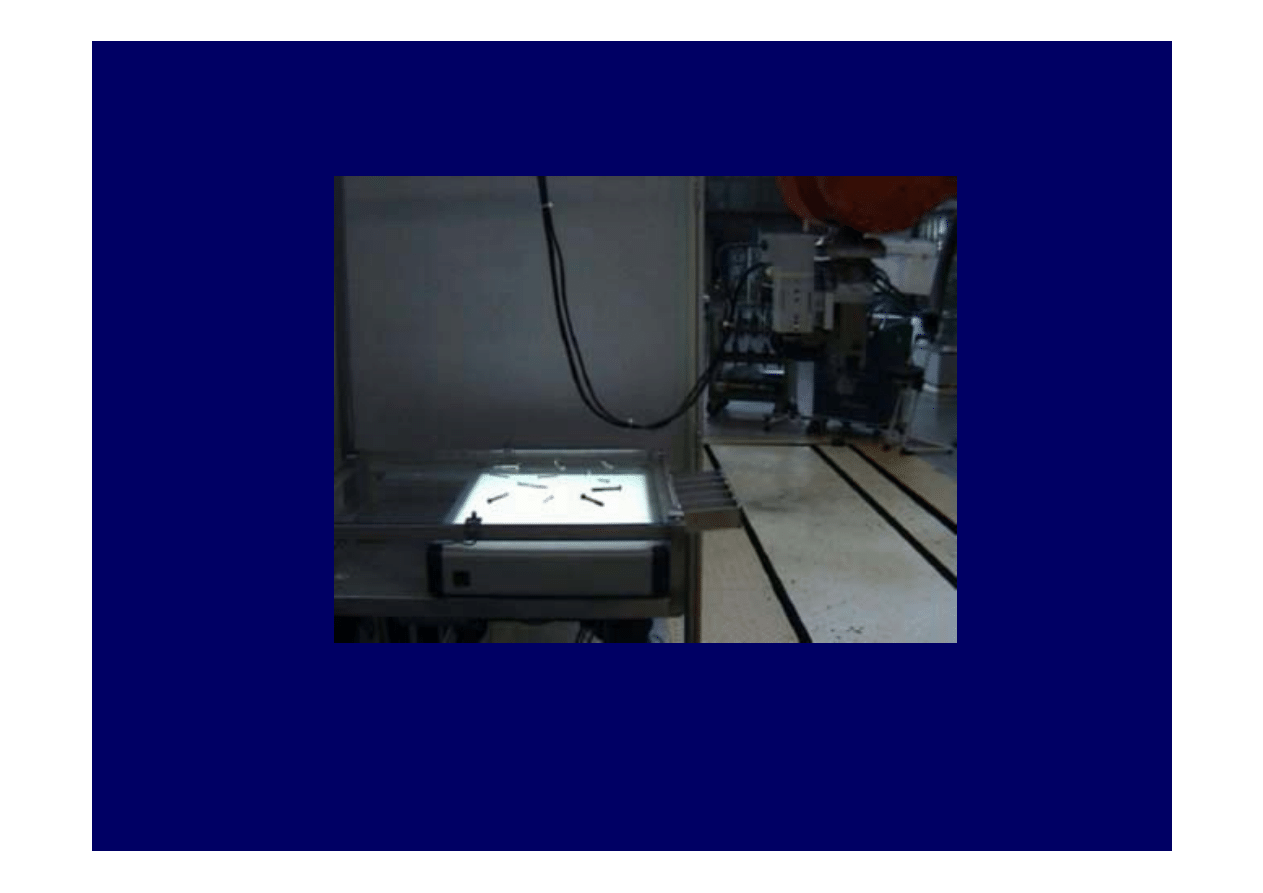
4. SENSORY WIZYJNE
Przykład zastosowania systemu wizyjnego do segregacji śrub według średnicy.
Document Outline
- WYKORZYSTANIE ROBOTÓW W SPAWALNICTWIE
- PODSTAWOWE OKREŒLENIA I PODZIA£ ROBOTÓW
- PODSTAWOWE OKREŒLENIA I PODZIA£ ROBOTÓW
- 1. ELEMENTY I ZESPO£Y ROBOTÓW
- 1. ELEMENTY I ZESPO£Y ROBOTÓW
- 1. ELEMENTY I ZESPO£Y ROBOTÓW
- 1. ELEMENTY I ZESPO£Y ROBOTÓW
- 2. UK£ADY WSPÓ£RZÊDNYCH I RUCHY
- 2. UK£ADY WSPÓ£RZÊDNYCH I RUCHY
- 2. UK£ADY WSPÓ£RZÊDNYCH I RUCHY
- 2. UK£ADY WSPÓ£RZÊDNYCH I RUCHY
- 2. UK£ADY WSPÓ£RZÊDNYCH I RUCHY
- 3. RODZAJE ROBOTÓW I MANIPULATORÓW PRZEMYS£OWYCH
- 3. RODZAJE ROBOTÓW I MANIPULATORÓW PRZEMYS£OWYCH
- 3. RODZAJE ROBOTÓW I MANIPULATORÓW PRZEMYS£OWYCH
- 4. CHARAKTERYSTYKI FUNKCJONALNE ROBOTÓW PRZEMYS£OWYCH
- 5. INTERFEJSY MECHANICZNE
- UK£ADY SENSORYCZNE W ROBOTYCE
- UK£ADY SENSORYCZNE W ROBOTYCE
- 1. SI£OWE SENSORY TAKTYLNE
- 1. SI£OWE SENSORY TAKTYLNE
- 1. SI£OWE SENSORY TAKTYLNE
- 1. SI£OWE SENSORY TAKTYLNE
- 2. SENSORY TAKTYLNE PRZEMIESZCZENIOWE
- 2. SENSORY TAKTYLNE PRZEMIESZCZENIOWE
- 3. SENSORY OPTYCZNE
- 4. SENSORY OPTYCZNE LASEROWE
- 4. SENSORY OPTYCZNE LASEROWE
- 4. SENSORY WIZYJNE
- 4. SENSORY WIZYJNE
- 4. SENSORY WIZYJNE
- 4. SENSORY WIZYJNE
Wyszukiwarka
Podobne podstrony:
podstawy robotyki odpowiedzi
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
Podstawy Robotyki lab5
Podstawy Robotyki lab3 id 36832 Nieznany
prim sciaga, PG ETI AiR i eletele, Sem4, Podstawy Robotyki
Robotyka-ściąga2, Studia ATH AIR stacjonarne, Rok II, Semestr III, Podstawy robotyki I, Pomoce nauko
notatek pl egzamin podstawy robotyki 2
wzory do wspolrzednosciomierza, PK WM AiR, UCZELNIA, OD SOLTYSA, Podstawy Robotyki
II EA Podstawy robotyki Plan laboratorium
Pytania z przedmiotu Podstawy robotyki ściąga
II EA Podstawy robotyki Ćwiczenie 1 Obliczenia symboliczne
CHRAPEK,podstawy robotyki, elementy sk adowe i struktura robotów
notacja DH podstawy robotyki
CHRAPEK,podstawy robotyki, Przyk ady konstrukcji robotów przemys owych
II EA Podstawy robotyki. Ćwiczenie 4. Zależności prędkościowe
CHRAPEK,podstawy robotyki, konstrukcja mechaniczna manipulatora
Podstawy Robotyki Program 0 3
TEST Z PAR, Mechatronika WAT, Semest III, Podstawy Robotyki
więcej podobnych podstron