
Akademia Górniczo-Hutnicza
w Krakowie
Modelowanie w Projektowaniu Maszyn
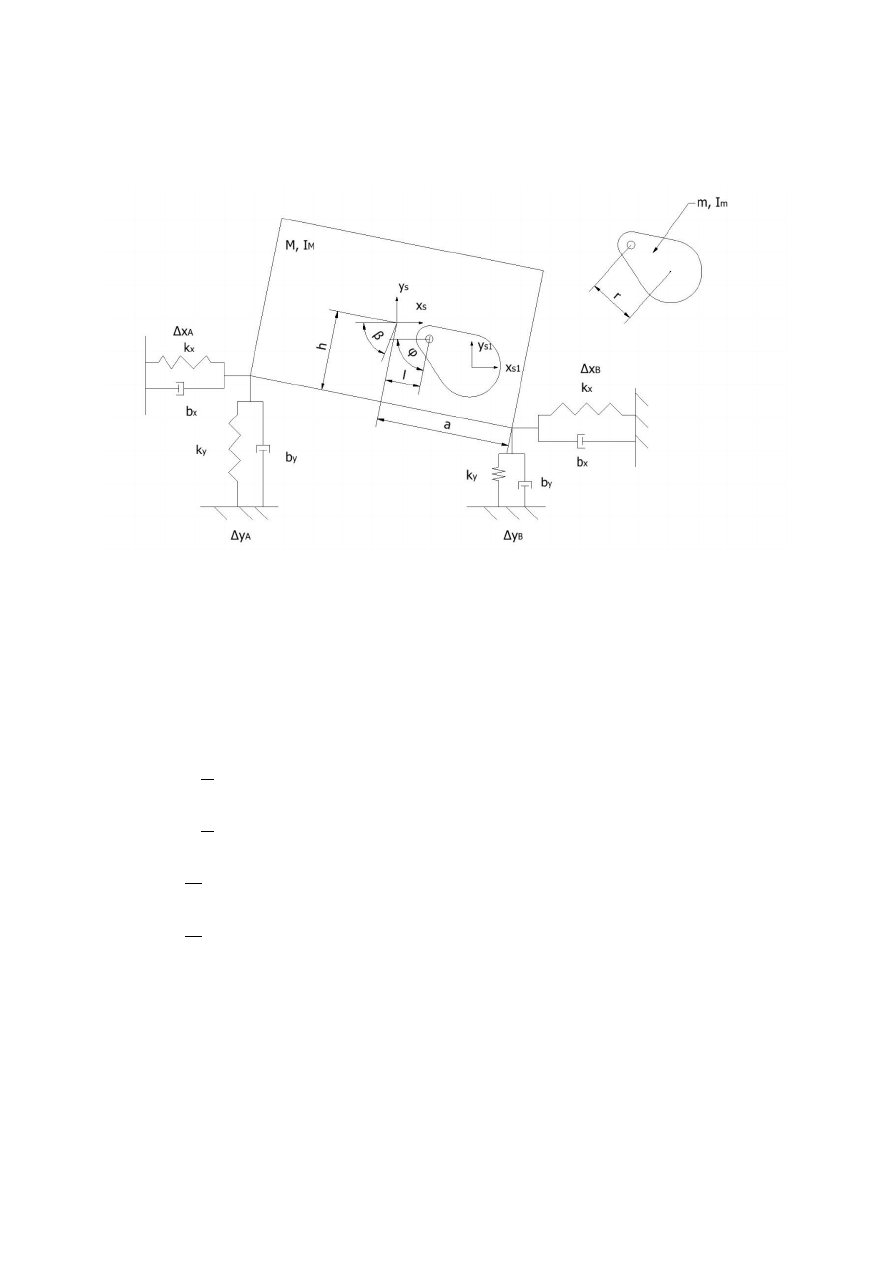
Stół wibracyjny
Projekt
Gr. I
Przywara Patryk
Śliwa Wojciech
Wełna Wojciech
Węglarz Mateusz
1. Rozwiązanie zagadnienia
Schemat:
Dane:
𝑀 = 90 𝑘𝑔 − 𝑚𝑎𝑠𝑎 𝑠𝑡𝑜ł𝑢
𝑚 = 7 𝑘𝑔 − 𝑚𝑎𝑠𝑎 𝑤𝑖𝑏𝑟𝑎𝑡𝑜𝑟𝑎
𝐼
𝑀
= 10,32 𝑘𝑔 ∙ 𝑚
2
− 𝑚𝑜𝑚𝑒𝑛𝑡 𝑏𝑒𝑧𝑤ł𝑎𝑑𝑛𝑜ś𝑐𝑖 𝑠𝑡𝑜ł𝑢
𝐼
𝑚
= 0,0063 𝑘𝑔 ∙ 𝑚
2
− 𝑚𝑜𝑚𝑒𝑛𝑡 𝑏𝑒𝑧𝑤ł𝑎𝑑𝑛𝑜ś𝑐𝑖 𝑤𝑖𝑏𝑟𝑎𝑡𝑜𝑟𝑎
𝑘𝑥 = 12915,9
𝑁
𝑚
− 𝑤𝑠𝑝ół𝑐𝑧𝑦𝑛𝑛𝑖𝑘 𝑠𝑝𝑟ęż𝑦𝑠𝑡𝑜ś𝑐𝑖 𝑛𝑎 𝑘𝑖𝑒𝑟𝑢𝑛𝑘𝑢 𝑋
𝑘𝑦 = 67371,1
𝑁
𝑚
− 𝑤𝑠𝑝ół𝑐𝑧𝑦𝑛𝑛𝑖𝑘 𝑠𝑝𝑟ęż𝑦𝑠𝑡𝑜ś𝑐𝑖 𝑛𝑎 𝑘𝑖𝑒𝑟𝑢𝑛𝑘𝑢 𝑌
𝑏𝑥 = 62,73
𝑘𝑔
𝑠
− 𝑤𝑠𝑝ół𝑐𝑧𝑦𝑛𝑛𝑖𝑘 𝑡ł𝑢𝑚𝑖𝑒𝑛𝑖𝑎 𝑛𝑎 𝑘𝑖𝑒𝑟𝑢𝑛𝑘𝑢 𝑋
𝑏𝑦 = 62,73
𝑘𝑔
𝑠
− 𝑤𝑠𝑝ół𝑐𝑧𝑦𝑛𝑛𝑖𝑘 𝑡ł𝑢𝑚𝑖𝑒𝑛𝑖𝑎 𝑛𝑎 𝑘𝑖𝑒𝑟𝑢𝑛𝑘𝑢 𝑌
𝑎 = 1 𝑚
ℎ = 0,2 𝑚
𝑒 = 0,03 𝑚
𝑙 = 0,5 𝑚
Współrzędne wyjściowe
𝑥
𝑠
, 𝑦
𝑠
, 𝜑, 𝛽, 𝑥
𝑠1
, 𝑦
𝑠1
Równania więzów:
{
𝑥
𝑠1
= 𝑥
𝑠
+ 𝑟 ∙ 𝑐𝑜𝑠𝜑 + 𝑙
𝑦
𝑠1
= 𝑦
𝑠
+ 𝑟 ∙ 𝑠𝑖𝑛𝜑 + 𝑙 ∙ 𝛽
{
𝑥
𝑠1
̇ = 𝑥
𝑠
̇ − 𝑟 ∙ 𝑠𝑖𝑛𝜑 ∙ 𝜑̇
𝑦
𝑠1
̇ = 𝑦̇
𝑠
+ 𝑟 ∙ 𝑐𝑜𝑠𝜑 ∙ 𝜑̇ + 𝑙 ∙ 𝛽̇
Zastosowane uproszczenia:
𝑠𝑖𝑛𝛽 = 𝛽
𝑐𝑜𝑠𝛽 = 1
Założenia:
∆𝑥
𝐴
= 𝑥
𝑠
+ ℎ ∙ 𝛽
∆𝑥
𝐵
= 𝑥
𝑠
− ℎ ∙ 𝛽
∆𝑦
𝐴
= 𝑦
𝑠
− 𝑎 ∙ 𝛽
∆𝑦
𝐵
= 𝑦
𝑠
+ 𝑎 ∙ 𝛽
Energia kinetyczna układu:
𝐸
𝑘
=
1
2
∙ 𝑀 ∙ 𝑥
𝑠
̇
2
+
1
2
∙ 𝑀 ∙ 𝑦
𝑠
̇
2
+
1
2
∙ 𝐼
𝑀
∙ 𝛽̇
2
+
1
2
∙ 𝑚 ∙ 𝑥
𝑠1
̇
2
+
1
2
∙ 𝑚 ∙ 𝑦
𝑠1
̇
2
+
1
2
∙ 𝐼
𝑚
∙ 𝜑̇
2
𝐸
𝑘
=
1
2
∙ 𝑀 ∙ 𝑥
𝑠
̇
2
+
1
2
∙ 𝑀 ∙ 𝑦
𝑠
̇
2
+
1
2
∙ 𝐼
𝑀
∙ 𝛽̇
2
+
1
2
∙ 𝑚(𝑥
𝑠
̇ −
𝑟 ∙ 𝑠𝑖𝑛𝜑 ∙ 𝜑
̇
)
2
+
1
2
∙ 𝑚(𝑦
𝑠
̇ +
𝑟 ∙ 𝑐𝑜𝑠𝜑 ∙ 𝜑
̇
+ 𝑙 ∙ 𝛽
̇
)
2
+
1
2
𝐼
𝑚
∙ 𝜑̇
2
𝐸
𝑘
=
1
2
∙ 𝑀 ∙ 𝑥
𝑠
̇
2
+
1
2
∙ 𝑀 ∙ 𝑦
𝑠
̇
2
+
1
2
∙ 𝐼
𝑀
∙ 𝛽̇
2
+
1
2
∙ 𝑚 ∙ (𝑥
𝑠
̇
2
− 2𝑥
𝑠
̇ ∙ 𝑟 ∙ 𝑠𝑖𝑛𝜑 ∙ 𝜑̇ + 𝑟
2
∙ 𝑠𝑖𝑛
2
𝜑 ∙ 𝜑̇
2
)
+
1
2
𝑚 ∙ (𝑦
𝑠
̇
2
+ 𝑟
2
∙ 𝑐𝑜𝑠
2
𝜑 ∙ 𝜑̇
2
+ 𝑙
2
∙ 𝛽
2
+ 2𝑦
𝑠
̇ ∙ 𝑟 ∙ 𝑐𝑜𝑠𝜑 ∙ 𝜑̇ + 2𝑦
𝑠
̇ ∙ 𝑙 ∙ 𝛽̇ + 2 ∙ 𝑟 ∙ 𝑐𝑜𝑠𝜑 ∙ 𝜑̇ ∙ 𝑙 ∙ 𝛽̇)
+
1
2
𝐼
𝑚
∙ 𝜑̇
2
Energia potencjalna układu:
𝐸
𝑝
=
1
2
∙ 𝑘𝑥(
∆𝑥
𝐴
+ ∆𝑥
𝐵
)
2
+
1
2
∙ 𝑘𝑦(
∆𝑦
𝐴
+ ∆𝑦
𝐵
)
2
𝐸
𝑝
=
1
2
∙ 𝑘𝑥 ((
𝑥
𝑠
+ ℎ ∙ 𝛽
)
2
+
(𝑥
𝑠
− ℎ ∙ 𝛽)
2
)
+
1
2
∙ 𝑘𝑦 ((
𝑦
𝑠
− 𝑎 ∙ 𝛽
)
2
+
(𝑦
𝑠
+ 𝑎 ∙ 𝛽)
2
)
𝐸
𝑝
=
1
2
∙ 𝑘𝑥(
𝑥
𝑠
2
+ 2 ∙ 𝑥
𝑠
∙ ℎ ∙ 𝛽 + ℎ
2
∙ 𝛽
2
+ 𝑥
𝑠
2
− 2 ∙ 𝑥
𝑠
∙ ℎ ∙ 𝛽 + ℎ
2
∙ 𝛽
2
) +
1
2
∙ 𝑘𝑦(
𝑦
𝑠
2
− 2 ∙ 𝑦
𝑠
∙ 𝑎 ∙ 𝛽
+ 𝑎
2
∙ 𝛽
2
+ 𝑦
𝑠
2
+ 2 ∙ 𝑦
𝑠
∙ 𝑎 ∙ 𝛽 + 𝑎
2
∙ 𝛽
2
)
𝐸
𝑝
= 𝑘𝑥 (
𝑥
𝑠
2
+ ℎ
2
∙ 𝛽
2
)
+ 𝑘𝑦(𝑦
𝑠
2
+ 𝑎
2
∙ 𝛽
2
)
Energia strat układu:
𝐸
𝑑
= 𝑘𝑥 (
𝑥
𝑠
̇
2
+ ℎ
2
∙ 𝛽
̇
2
)
+ 𝑘𝑦(𝑦
𝑠
̇
2
+ 𝑎
2
∙ 𝛽
̇
2
)
Ogólna postać równania Lagrange’a II rodzaju:
𝑑
𝑑𝑡
(
𝛿
𝐸
𝑘
𝛿𝑞̇
) +
𝛿
𝐸
𝑝
𝛿𝑞
+
𝛿
𝐸
𝑑
𝛿𝑞̇
= 𝐹
Równanie Lagrange’a II rodzaju dla współrzędnej 𝑥
𝑠
:
𝑑
𝑑𝑡
(
𝛿
𝐸
𝑘
𝛿𝑥
𝑠
̇
) = 𝑀 ∙ 𝑥
𝑠
̈ + 𝑚 ∙ 𝑥
𝑠
̈ − 𝑚 ∙ 𝑟 ∙ (𝑐𝑜𝑠𝜑 ∙ 𝜑̇ ∙ 𝜑̇ + 𝑠𝑖𝑛𝜑 ∙ 𝜑̈)
𝛿
𝐸
𝑝
𝛿𝑥
𝑠
= 2 ∙ 𝑘𝑥 ∙ 𝑥
𝑠
𝛿
𝐸
𝑝
𝛿𝑥
𝑠
̇
= 2 ∙ 𝑏𝑥 ∙ 𝑥
𝑠
̇
𝑥
𝑠
̈ (𝑀 + 𝑚) − 𝑚 ∙ 𝑟 ∙ (𝑐𝑜𝑠𝜑 ∙ 𝜑̇ ∙ 𝜑̇ + 𝑠𝑖𝑛𝜑 ∙ 𝜑̈) + 2 ∙ 𝑘𝑥 ∙ 𝑥
𝑠
+ 2 ∙ 𝑏𝑥 ∙ 𝑥
𝑠
̇ = 0
Równanie Lagrange’a II rodzaju dla współrzędnej 𝑦
𝑠
:
𝑑
𝑑𝑡
(
𝛿
𝐸
𝑘
𝛿𝑦
𝑠
̇
) = 𝑀 ∙ 𝑦
𝑠
̈ + 𝑚 ∙ 𝑦
𝑠
̈ − 𝑚 ∙ 𝑟 ∙ (−𝑠𝑖𝑛𝜑 ∙ 𝜑̇ ∙ 𝜑̇ + 𝑐𝑜𝑠𝜑 ∙ 𝜑̈) + 𝑚 ∙ 𝑙 ∙ 𝛽̈
𝛿
𝐸
𝑝
𝛿𝑦
𝑠
= 2 ∙ 𝑘𝑦 ∙ 𝑦
𝑠
𝛿
𝐸
𝑝
𝛿𝑦
𝑠
̇
= 2 ∙ 𝑏𝑦 ∙ 𝑦
𝑠
̇
𝑦
𝑠
̈ (𝑀 + 𝑚) + 𝑚 ∙ 𝑟 ∙ (−𝑠𝑖𝑛𝜑 ∙ 𝜑̇ ∙ 𝜑̇ + 𝑐𝑜𝑠𝜑 ∙ 𝜑̈) + 𝛽̈ ∙ 𝑚 ∙ 𝑙 + 2 ∙ 𝑘𝑦 ∙ 𝑦
𝑠
+ 2 ∙ 𝑏𝑦 ∙ 𝑦
𝑠
̇ = 0
Równanie Lagrange’a II rodzaju dla współrzędnej 𝛽:
𝑑
𝑑𝑡
(
𝛿
𝐸
𝑘
𝛿𝛽̇
) = 𝐼
𝑀
∙ 𝛽̈ + 𝑚 ∙ 𝑙
2
∙ 𝛽̈ + 𝑚 ∙ 𝑙 ∙ 𝑦
𝑠
̈ + 𝑚 ∙ 𝑟 ∙ 𝑙 ∙ (−𝑠𝑖𝑛𝜑 ∙ 𝜑̇ ∙ 𝜑̇ + 𝑐𝑜𝑠𝜑 ∙ 𝜑̈)
𝛿
𝐸
𝑝
𝛿𝛽
= 2 ∙ 𝑘𝑥 ∙ ℎ
2
∙ 𝛽 + 2 ∙ 𝑘𝑦 ∙ 𝑎
2
∙ 𝛽
𝛿
𝐸
𝑝
𝛿𝛽̇
= 2 ∙ 𝑏𝑥 ∙ ℎ
2
∙ 𝛽̇ + 2 ∙ 𝑏𝑦 ∙ 𝑎
2
∙ 𝛽̇
𝛽̈(𝐼
𝑀
+ 𝑚 ∙ 𝑙
2
) + 𝑦
𝑠
̈ ∙ 𝑚 ∙ 𝑙 + 𝑚 ∙ 𝑟 ∙ 𝑙 ∙ (−𝑠𝑖𝑛𝜑 ∙ 𝜑 ∙̇ 𝜑̇ + 𝑐𝑜𝑠𝜑 ∙ 𝜑̈) + 𝛽 ∙ (2 ∙ 𝑘𝑥 ∙ ℎ
2
+ 2 ∙ 𝑘𝑦 ∙ 𝑎
2
)
+ 𝛽̇ ∙ (2 ∙ 𝑘𝑥 ∙ ℎ
2
+ 2 ∙ 𝑘𝑦 ∙ 𝑎
2
) = 0
Równanie Lagrange’a II rodzaju dla współrzędnej 𝜑:
𝑑
𝑑𝑡
(
𝛿
𝐸
𝑘
𝛿𝜑̇
) = −𝑚 ∙ 𝑟 ∙ (𝑥
𝑠
̈ ∙ 𝑠𝑖𝑛𝜑 + 𝑥
𝑠
̇ ∙ 𝑐𝑜𝑠𝜑 ∙ 𝜑̇) + 𝑚 ∙ 𝑟
2
∙ [(2 ∙ 𝑠𝑖𝑛𝜑 ∙ 𝑐𝑜𝑠𝜑 ∙ 𝜑̇) ∙ 𝜑̇ + 𝑠𝑖𝑛
2
𝜑 ∙ 𝜑̈]
+ 𝑚 ∙ 𝑟
2
∙ [(2 ∙ 𝑐𝑜𝑠𝜑 ∙ (−𝑠𝑖𝑛𝜑) ∙ 𝜑̇) ∙ 𝜑̇ + 𝑐𝑜𝑠
2
𝜑 ∙ 𝜑̈]
+ 𝑚 ∙ 𝑟 ∙ (𝑦
𝑠
̈ ∙ 𝑐𝑜𝑠𝜑 + 𝑦
𝑠
̇ ∙ (−𝑠𝑖𝑛𝜑) ∙ 𝜑̇)
+ 𝑚 ∙ 𝑟 ∙ 𝑙 ∙ (−𝑠𝑖𝑛𝜑 ∙ 𝜑 ∙̇ 𝛽̇ + 𝑐𝑜𝑠𝜑 ∙ 𝛽̈) + 𝐼
𝑚
∙ 𝜑̈
𝛿
𝐸
𝑝
𝛿𝜑
= 0
𝛿
𝐸
𝑝
𝛿𝜑̇
= 0
𝑚 ∙ 𝑟 ∙ [𝑦
𝑠
̈ ∙ 𝑐𝑜𝑠𝜑 − 𝑥
𝑠
̈ ∙ 𝑠𝑖𝑛𝜑 − 𝜑̇ ∙ (𝑦
𝑠
̇ ∙ 𝑠𝑖𝑛𝜑 + 𝑥
𝑠
̇ ∙ 𝑐𝑜𝑠𝜑)] + 𝜑̈ ∙ (𝐼
𝑚
+ 𝑚 ∙ 𝑟
2
)
+ 𝑚 ∙ 𝑟 ∙ 𝑙 ∙ (𝑐𝑜𝑠𝜑 ∙ 𝛽̈ − 𝑠𝑖𝑛𝜑 ∙ 𝜑̇ ∙ 𝛽̇) = 𝑀
𝑒𝑙
Równania ruchu:
a) dla współrzędnej 𝑥
𝑠
:
𝑥
𝑠
̈ (𝑀 + 𝑚) − 𝜑̈ ∙ 𝑚 ∙ 𝑟 ∙ 𝑠𝑖𝑛𝜑 = 𝑚 ∙ 𝑟 ∙ 𝑐𝑜𝑠𝜑 ∙ 𝜑̇
2
− 2 ∙ 𝑘𝑥 ∙ 𝑥
𝑠
− 2 ∙ 𝑏𝑥 ∙ 𝑥
𝑠
̇
b) dla współrzędnej 𝑦
𝑠
:
𝑦
𝑠
̈ (𝑀 + 𝑚) + 𝜑̈ ∙ 𝑚 ∙ 𝑟 ∙ 𝑐𝑜𝑠𝜑 + +𝛽̈ ∙ 𝑚 ∙ 𝑙 = 𝑚 ∙ 𝑟 ∙ 𝑠𝑖𝑛𝜑 ∙ 𝜑̇
2
− 2 ∙ 𝑘𝑦 ∙ 𝑦
𝑠
− 2 ∙ 𝑏𝑦 ∙ 𝑦
𝑠
̇
c) dla współrzędnej 𝛽:
𝛽̈(𝐼
𝑀
+ 𝑚 ∙ 𝑙
2
) + 𝑦
𝑠
̈ ∙ 𝑚 ∙ 𝑙 + 𝜑̈ ∙ 𝑚 ∙ 𝑟 ∙ 𝑙 ∙ 𝑐𝑜𝑠𝜑 = 𝑚 ∙ 𝑟 ∙ 𝑙 ∙ 𝑠𝑖𝑛𝜑 ∙ 𝜑̇
2
− 2 ∙ 𝛽 ∙ 𝑘𝑥 ∙ ℎ
2
− 2 ∙ 𝛽 ∙ 𝑘𝑦 ∙ 𝑎
2
− 2 ∙ 𝛽̇ ∙ 𝑏𝑥 ∙ ℎ
2
− 2 ∙ 𝛽̇ ∙ 𝑏𝑦 ∙ 𝑎
2
d) dla współrzędnej 𝜑:
𝑦
𝑠
̈ ∙ 𝑚 ∙ 𝑟 ∙ 𝑐𝑜𝑠𝜑 − 𝑥
𝑠
̈ ∙ 𝑚 ∙ 𝑟 ∙ 𝑠𝑖𝑛𝜑 + 𝜑̈ ∙ (𝐼
𝑚
+ 𝑚 ∙ 𝑟
2
) + 𝛽̈ ∙ 𝑚 ∙ 𝑟 ∙ 𝑙 ∙ 𝑐𝑜𝑠𝜑
= 𝜑̇ ∙ 𝑦
𝑠
̇ ∙ 𝑚 ∙ 𝑟 ∙ 𝑠𝑖𝑛𝜑 + 𝜑̇ ∙ 𝑥
𝑠
̇ ∙ 𝑚 ∙ 𝑟 ∙ 𝑐𝑜𝑠𝜑 + 𝛽̇ ∙ 𝜑̇ ∙ 𝑚 ∙ 𝑟 ∙ 𝑙 ∙ 𝑠𝑖𝑛𝜑
Podstawienia:
𝑥
𝑠
̇ = 𝑉
𝑥
𝑦
𝑠
̇ = 𝑉
𝑦
𝛽̇ = 𝜔
𝛽
𝜑̇ = 𝜔
𝜑
𝑀
𝑒𝑙
=
3147,488 ∙ (157 − 𝜑̇)
2686,98 + (157 − 𝜑̇)
2

Równania ruchu w postaci macierzowej:
[
1 0 0 0
0
0
0
0
0 1 0 0
0
0
0
0
0 0 1 0
0
0
0
0
0 0 0 1
0
0
0
0
0 0 0 0
𝑀 + 𝑚
0
0
−𝑚 ∙ 𝑟 ∙ 𝑠𝑖𝑛𝜑
0 0 0 0
0
𝑀 + 𝑚
𝑚 ∙ 𝑙
𝑚 ∙ 𝑟 ∙ 𝑐𝑜𝑠𝜑
0 0 0 0
0
𝑚 ∙ 𝑙
𝐼
𝑀
+ 𝑚 ∙ 𝑙
2
𝑚 ∙ 𝑟 ∙ 𝑙 ∙ 𝑐𝑜𝑠𝜑
0 0 0 0 −𝑚 ∙ 𝑟 ∙ 𝑠𝑖𝑛𝜑 𝑚 ∙ 𝑟 ∙ 𝑐𝑜𝑠𝜑 𝑚 ∙ 𝑟 ∙ 𝑙 ∙ 𝑐𝑜𝑠𝜑
𝐼
𝑚
+ 𝑚 ∙ 𝑟
2
]
∙
𝑑
𝑑𝑡
[
𝑥
𝑠
𝑦
𝑠
𝛽
𝜑
𝑣
𝑥
𝑣
𝑦
𝜔
𝛽
𝜔
𝜑
]
=
=
[
𝑣
𝑥
𝑣
𝑦
𝜔
𝛽
𝜔
𝜑
𝑚 ∙ 𝑟 ∙ 𝑐𝑜𝑠𝜑 ∙ 𝜔
𝜑
2
− 2 ∙ 𝑘𝑥 ∙ 𝑥
𝑠
− 2 ∙ 𝑏𝑥 ∙ 𝑣
𝑥
𝑚 ∙ 𝑟 ∙ 𝑠𝑖𝑛𝜑 ∙ 𝜔
𝜑
2
− 2 ∙ 𝑘𝑦 ∙ 𝑦
𝑠
− 2 ∙ 𝑏𝑦 ∙ 𝑣
𝑦
𝑚 ∙ 𝑟 ∙ 𝑙 ∙ 𝑠𝑖𝑛𝜑 ∙ 𝜔
𝜑
2
− 2 ∙ 𝑘𝑥 ∙ ℎ
2
∙ 𝛽 − 2 ∙ 𝑘𝑦 ∙ 𝑎
2
∙ 𝛽 − 2 ∙ 𝑏𝑥 ∙ ℎ
2
∙ 𝜔
𝛽
− 2 ∙ 𝑏𝑦 ∙ 𝑎
2
∙ 𝜔
𝛽
𝑚 ∙ 𝑟 ∙ 𝑠𝑖𝑛𝜑 ∙ 𝜔
𝜑
∙ 𝑣
𝑦
+ 𝑚 ∙ 𝑟 ∙ 𝑐𝑜𝑠𝜑 ∙ 𝜔
𝜑
∙ 𝑣
𝑥
+ 𝑚 ∙ 𝑟 ∙ 𝑙 ∙ 𝑠𝑖𝑛𝜑 ∙ 𝜔
𝜑
∙ 𝜔
𝛽
+ 𝑀
𝑒𝑙
]
Rozwiązanie zagadnienia:
[𝑀]
𝑑
𝑑𝑡
[𝑋̅] = [𝑄̅]
𝑑
𝑑𝑡
[𝑋̅] = [𝑀]
−1
∙ [𝑄̅]
Wyszukiwarka
Podobne podstrony:
projekty 3 id 400866 Nieznany
kse projekt id 252149 Nieznany
projekt29 id 400291 Nieznany
projektMOS id 400412 Nieznany
projektowanie 2 id 400443 Nieznany
Projekt 7 A id 398367 Nieznany
projekt0002 id 400180 Nieznany
Projekt 6 id 397770 Nieznany
Omowienie projektu id 335352 Nieznany
PROJEKT 5 id 398124 Nieznany
GW PROJEKT F id 197909 Nieznany
projekt 4 i 5 id 398318 Nieznany
Mechana projekt2 id 290480 Nieznany
projekt 1 3 id 397964 Nieznany
Projekt3 id 400307 Nieznany
projekt 3 id 398252 Nieznany
6 Zasady Projektowania id 43987 Nieznany (2)
Projekt X id 399818 Nieznany
pkm projekt 3 id 359898 Nieznany
więcej podobnych podstron