POLITECHNIKA ŚLĄSKA
GLIWICE
WYDZIAŁ MECHANICZNY TECHNOLOGICZNY
Katedra Budowy Maszyn
MODELOWANIE UKŁADÓW MECHANICZNYCH
Krzysztof Pisarski
AiR_AB4_2012/2013
Semestr III zaoczny

Systemy mechaniczne są na ogół budowane ze sztywnych elementów,
połączonych za pomocą par kinematycznych, które zapewniają odpowiednią
ruchliwość mechanizmów tworzących system i w konsekwencji jego skoordynowane
działanie. Ze względu na "ziarnistą" strukturę, takie systemy są najczęściej
odzwierciedlane przez modele fizyczne o
parametrach rozłożonych w przestrzeni, w
postaci układu ciał materialnych, poddanych działaniu więzów i sił zewnętrznych.
Sposobów wyznaczania równań równowagi dynamicznej badanych układów
jest przynajmniej kilka. Centralnym zagadnieniem
wyprowadzenia równań ruchu
dla danego
modelu układu fizycznego, jak już wcześniej podano, jest sformułowanie
zależności wyrażających równowagę sił, wydatków przepływów lub zmian energii dla
badanego układu, albo napisanie równań spójności opisujących zależności
występujące między ruchami elementów, ze względu na sposób ich połączenia.
Przy układaniu równań ruchu należy rozważyć niezależnie:
-
zmienne przepływu i spadku;
-
równania równowagi lub spójności;
- zale
żności fizyczne dla każdego elementu;
- przedstawi
ć te zależności w postaci równań
Przedstawiona procedura dla układów mechanicznych obejmuje:
- zale
żności geometryczne;
-
równowagę sił;
- zwi
ązki między geometrią układu i siłami.
W przypadku prostych
układów o niewielkiej liczbie stopni swobody można
przy
układaniu równań ruchu wykorzystać wprost II prawo Newtona lub zasadę
d’Alemberta (metoda sił). Dla układów złożonych o większej liczbie stopni swobody
wygodnie jest zastosowa
ć równania Lagrange’a II rodzaju (metoda energetyczna)
wyprowadzane w mechanice analitycznej.
Założenia przyjmowane przy układaniu równań ruchu:
- rozwa
żane układy mają więzy holonomiczne, czyli więzy niezależne od pochodnych
współrzędnych uogólnionych (prędkości uogólnionych);
- model obliczeniowy rozwa
żanego układu rzeczywistego jest modelem dyskretnym,
jego
położenie opisuje skończona liczba współrzędnych uogólnionych;
-
do zdefiniowania sił uogólnionych wykorzystuje się zasadę prac przygotowanych.

Zasady i etapy modelowania
W procesie opisu systemu wykorzystuje się kolejno kilka rodzajów modeli.
a)
lingwistyczne (opis słowny),
b) graficzne (np. schemat obwodu, wykresy charakterystyk),
c) matematyczne.
Ostatecznym celem jest model matematyczny. Ten możemy uzyskać poprzez
wykorzystanie podstawowych praw/zasad techniki (np. Ohma, Newtona, Hooka,
zachowania energii) do opisu systemu (modelowanie fizykalne) lub przez zapis
matematyczny funkcji systemu bez analizy na poziomie fizycznym (modelowanie
funkcjonalne).
Proces tw
orzenia modelu przebiega następująco:
1) analiza budowy elementu
2) o
bserwacja zachowania się elementu
3) z
astosowanie praw/zasad do określenia postaci modelu fizykalnego i wartości
jego parametrów (patrz przykład filtra) lub oddanie funkcji wykonywanej przez
element w modelu funkcjonalnym (przykład oczu ludzkich)
4) i
dentyfikacja brakujących elementów modelu (np. wyznaczenie stałej czasowej )
5) w
eryfikacja utworzonego modelu przez porównanie jego odpowiedzi z
odpowiedzią elementu
Modelowanie w diagnostyce maszyn
Poznanie stanu dynamicznego obiektu wymaga w ujęciu eksperymentalnym
jednoznacznego skojarzenia cech stanu obiektu ze zbiorem miar i ocen
generowanych
procesów
wyjściowych
-
czyli
symptomów.
Algorytmy
przyporządkowujące sobie oba zbiory cech - konstrukcji i symptomów - są podstawą
tworzenia modeli obiektów.
W ogóle modele stosowane w badaniach mogą być: symptomowe i
holistyczne.
Modele symptomowe opisuj
ą stan techniczny obiektu w kategoriach obserwowanych
symptomów, nie zawierających czasu dynamicznego "t" lecz tylko czas życia "q".
Natomiast

modele holistyczne ujmuj
ą dynamikę systemu i jego procesy zużyciowe łącznie.
W technice mo
żna wyróżnić następujące cele tworzenia modeli:
- dla potrzeb projektowania
, gdzie model służy do optymalizacji struktury i
parametrów konstruowanego obiektu i jest narzędziem oceny "jakości" konstrukcji,
eliminacji słabych ogniw, projektowania układów nadzoru, (modele funkcjonalne i
niezawodno
ściowe);
- dla potrzeb diagnozowania, gdzie model jest podstaw
ą ustalenia algorytmu
diagnozowania, który prowadzi do określenia stanu aktualnego i przyszłego obiektu;
- dla potrzeb u
żytkowania i sterowania, wykorzystujących model do podejmowania
decyzji
z działającym obiektem (zakres działać obsługowych, decyzje
eksploatacyjne).
Aktualny
stan
dynamiczny
maszyny
mo
żna określać obserwując
funkcjonowanie obiektu, tzn. jego wyj
ście główne przekształconej energii (lub
produktu), oraz wyj
ście dyssypacyjne - gdzie obserwuje się procesy resztkowe, np.
termiczne, wibracyjne, akustyczne, elektromagnetyczne.
Zale
żnie od modelu można to zobrazować odpowiednio – dla modelu
symptomowego i holistycznego w uj
ęciu mechanicznym, jak na rysunku poniżej.
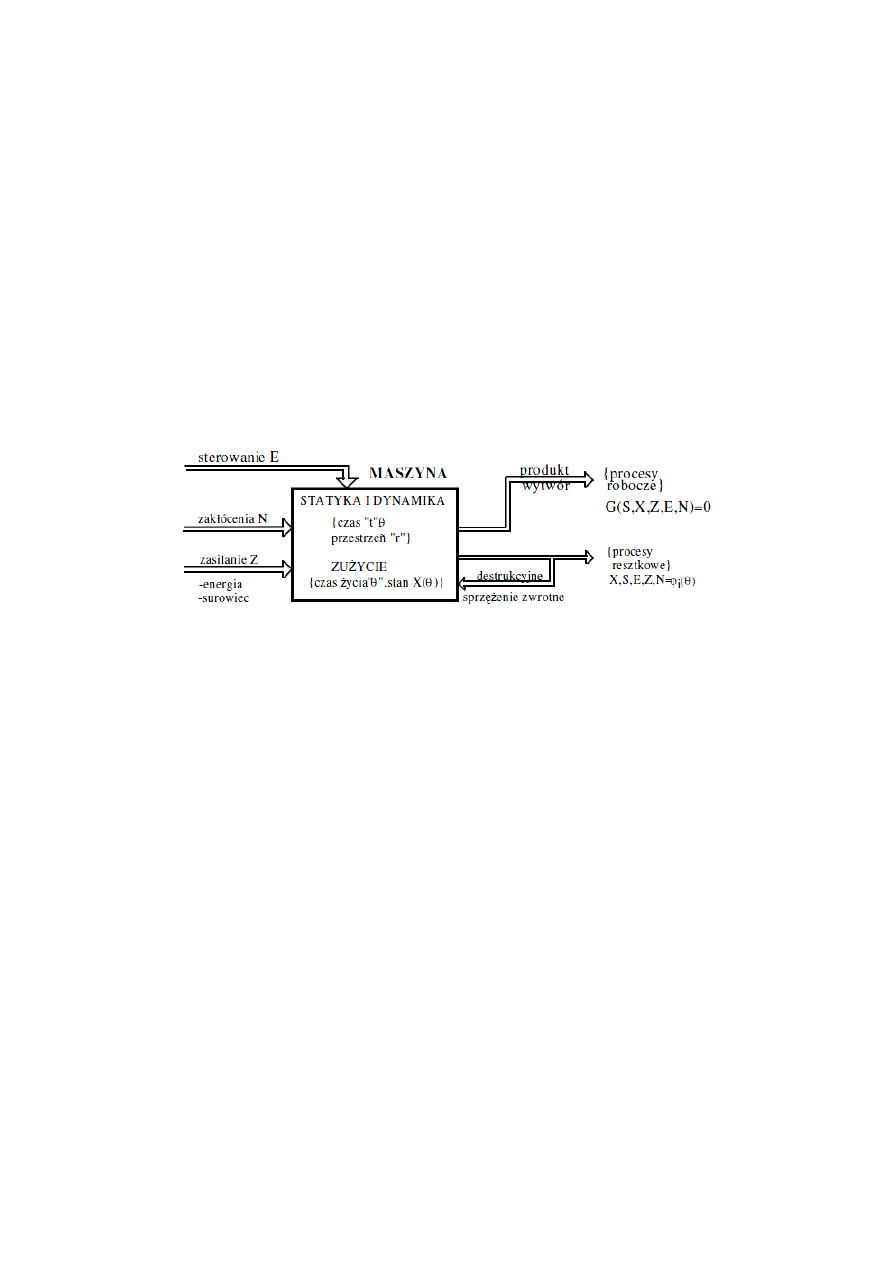
W przypadku modelu tradycyjnego (rys.1) stan obiektu jest definiowany w
kategoriach symptomowych, jako
ści i bezpieczeństwa, poprzez wektor miar
bezpo
średnich lub pośrednich. Obserwacja tych wyjść daje całą gamę możliwości
diagnozowania stanu poprzez: obserwacj
ę procesów roboczych, badania jakości
wytworów lub obserwację procesów resztkowych.
Modelowanie symptomowe
Najbardziej ogólny model obiektu dla potrzeb oceny stanu w ujęciu
symptomowym przedstawiono na rys.1. Stan obiektu mo
żna tu określać obserwując
funkcjonowanie obiektu, tzn. jego wyj
ście główne przekształconej energii (lub
produktu) oraz wyj
ście dyssypacyjne, gdzie obserwujemy różnego typu procesy
resztkowe (termiczne, wibracyjne, akustyczne, elektromagnetyczne).
Przedstawiony model obiektu
opisuje równanie wektorowe :
G ( X, S, E, Z, N ) = 0
Interesuj
ący nas stan obiektu można więc określić z zależności :
X = g ( S, Z, E, N )
Realizacja eksperymentalna powy
ższej zależności jest możliwa po przyjęciu
uproszcze
ń, zakładających stałość w sensie wartości średnich wektorów E, Z = 0, a
wynikaj
ących z przyjętego modelu obiektu. Mamy zatem :
X = F ( S )
Z,E
=
const
+ N
Uwzgl
ędniając dziedziny określoności poszczególnych wektorów tej relacji,
otrzymujemy podstawowe równanie stanu w postaci :
X (t,q,r) = A (r) S (q, r) + N (q,r)
Wektorowy opis struktury obiektu, jego wej
ść: zasilania, sterowania i zakłóceń oraz
wyj
ść energetycznych (użytecznych i resztkowych) prowadzi bezpośrednio do opisu
mo
żliwych relacji diagnostycznych.
Rys.1. Model obiektu diagnostyki
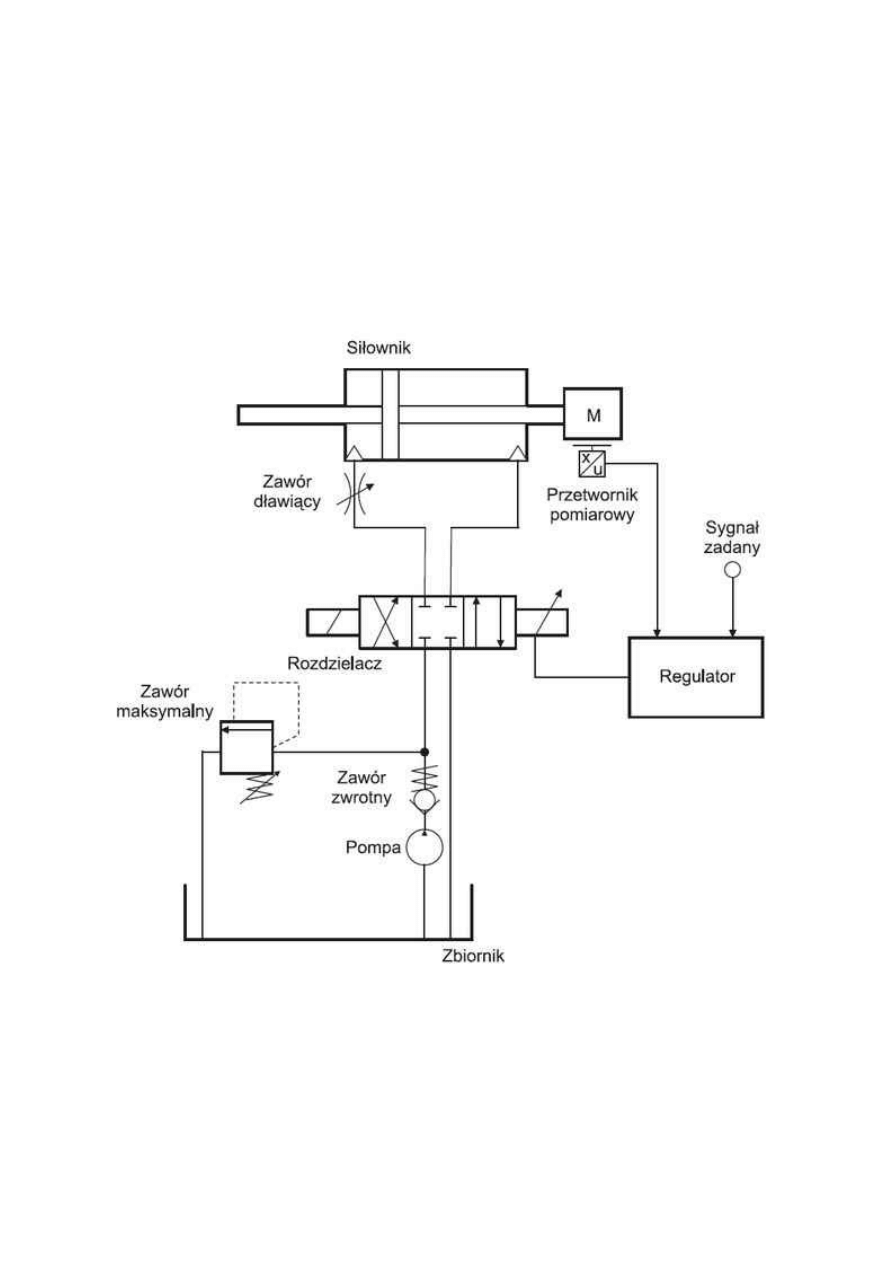
OGÓLNY MODEL SERWOMECHANIZMU ELEKTROHYDRAULICZNEGO
Uproszczony
model
serwomechanizmu
elektrohydraulicznego
przedstawiony został na rysunku 2. Wykorzystuje się tutaj standardową
reprezentację graficzną stosowaną podczas projektowania układów hydraulicznych
(norma PN-ISO 1219- 1:1994).
Modelowanie serwomechanizmu elektrohydraulicznego polega na rozpatrzeniu
dynamiki ruchu suwaka rozdzielacza, bilansu przepływów w komorach rozdzielacza i
siłownika oraz dynamiki ruchu tłoczyska siłownika pod wpływem sił występujących w
układzie.
Praktycznie wszystkie fizyczne układy przejawiają własności nieliniowe. W
najprostszych przypadkach może to być ograniczenie ruchu, tarcie, histereza,
zużycie mechaniczne lub luzy. Podczas modelowania złożonych układów
elektrohydraulicznych możliwe jest czasem (poprzez linearyzację w punkcie pracy)
wyprowadzenie m
odelu liniowego, który będzie przybliżał zachowanie rzeczywistego
systemu. Oczywiście model i jego parametry zależą ściśle od budowy elementów
serwomechanizmu
, zastosowanego rozdzielacza i siłownika, układu zasilającego,
cieczy roboczej i warunków otoczenia. Tak więc podczas wyznaczania modelu
często przyjmuje się założenia upraszczające i rozpatruje układ o charakterystycznej
konfiguracji, pracujący w określonych warunkach.
,,
Rys. 2. Schemat poglądowy serwomechanizmu elektrohydraulicznego
Wyszukiwarka
Podobne podstrony:
Modelowanie układów mechanicznych
L3 Modelowanie układów mechanicznych
Mechanika Teoretyczna Modelowanie układów
modelowanie ukladow przelaczaja Nieznany
IMW W03 Modelowanie ukladow id Nieznany
MODELOWANIE UKŁADÓW KOMBINACYJNYCH ZA POMOCĄ FUNKTORÓW LOGICZNYCH
Modelowanie układów logicznych na elementach elektronicznych
modelowanie ukladow logicznych w oparciu o elementy elektroniczne
modelowanie układów przełączających z wykorzystaniem elementów pneumatycznych i elektrycznychx
Projektowanie dyskretnych układów mechanicznych synteza stary off
Modelowanie układów logicznych w oparciu o elementy elektroniczne
Modelowanie układów dynamicznych na elektronicznej maszynie analogowej, STUDIA - Kierunek Transport,
modelowanie układów regulacji
modelowanie ukladow wlewowych sprawko
MODELOWANIE UKŁADÓW KOMBINACYJNYCH ZA POMOCĄ FUNKTORÓW LOGICZNYCH SCHEMAT
Modelowanie układów mechatronicznych w środowiskach obliczeniowych WYKŁAD
LTS 2 Modelowanie ukladow dynamicznyc
więcej podobnych podstron