Metoda Maxwella – Mohra
Układy statycznie niewyznaczalne
Metoda sił
Zasada minimum energii
Metody energetyczne
2
1
2
2
N dx
dV
Ndu
EA
=
=
2
1
2
2
S
s
S
M dx
dV
M d
GI
ϕ
=
=
2
1
2
2
g
g
M dx
dV
M d
EI
ϑ
=
=
2
1
2
2
T
T dx
dV
Tdv
GA
β
=
=
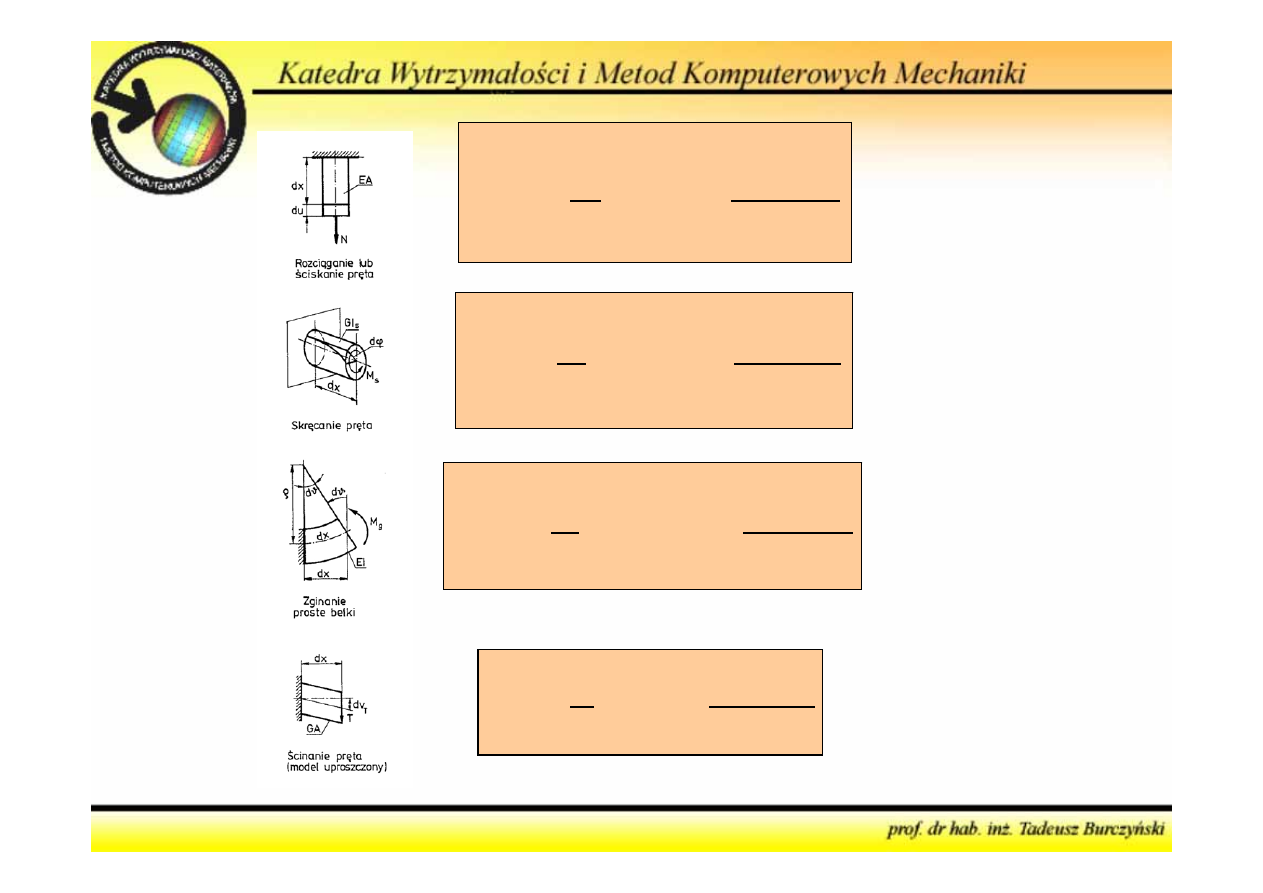
Energia
sprężysta
układu
prętowego
(
)
(
)
2
1
2
Sila wewnętrzna
dV
dx
Sztywnosc
=
2
1
2
dV
N
dx
EA
=
Rozciąganie:
2
1
2
g
M
dV
dx
EI
=
Zginanie:
2
1
2
s
s
M
dV
dx
GI
=
Skręcanie:
2
1
2
dV
T
dx
GA
β
=
Ścinanie:
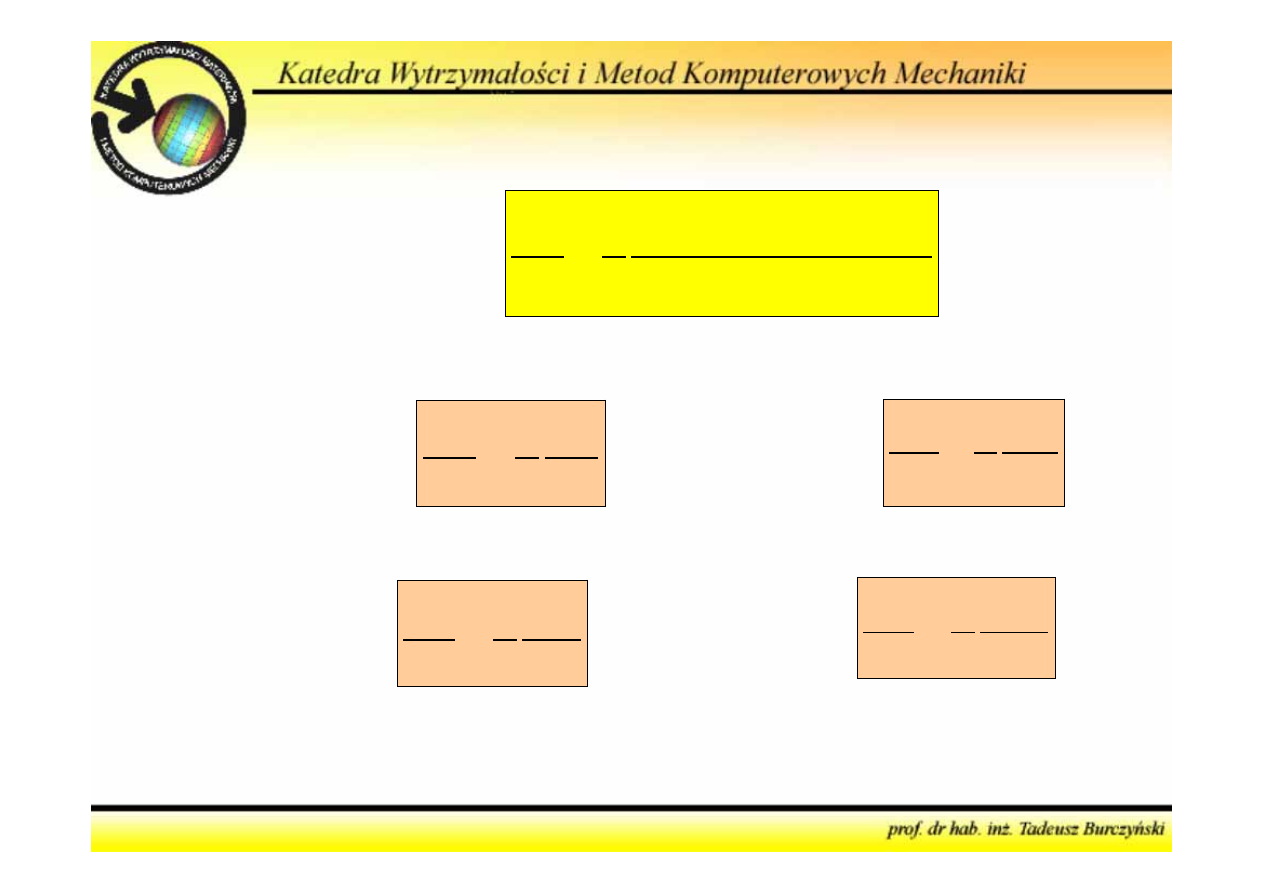
(
)
(
)
2
0
2
l
Sila wewnętrzna dx
V
Sztywnosc
=
∫
2
0
2
l
N dx
V
EA
=
∫
Rozciąganie:
2
0
2
l
g
M dx
V
EI
=
∫
Zginanie:
2
0
2
l
s
s
M dx
V
GI
=
∫
Skręcanie:
2
0
2
l
T dx
V
GA
β
=
∫
Ścinanie:
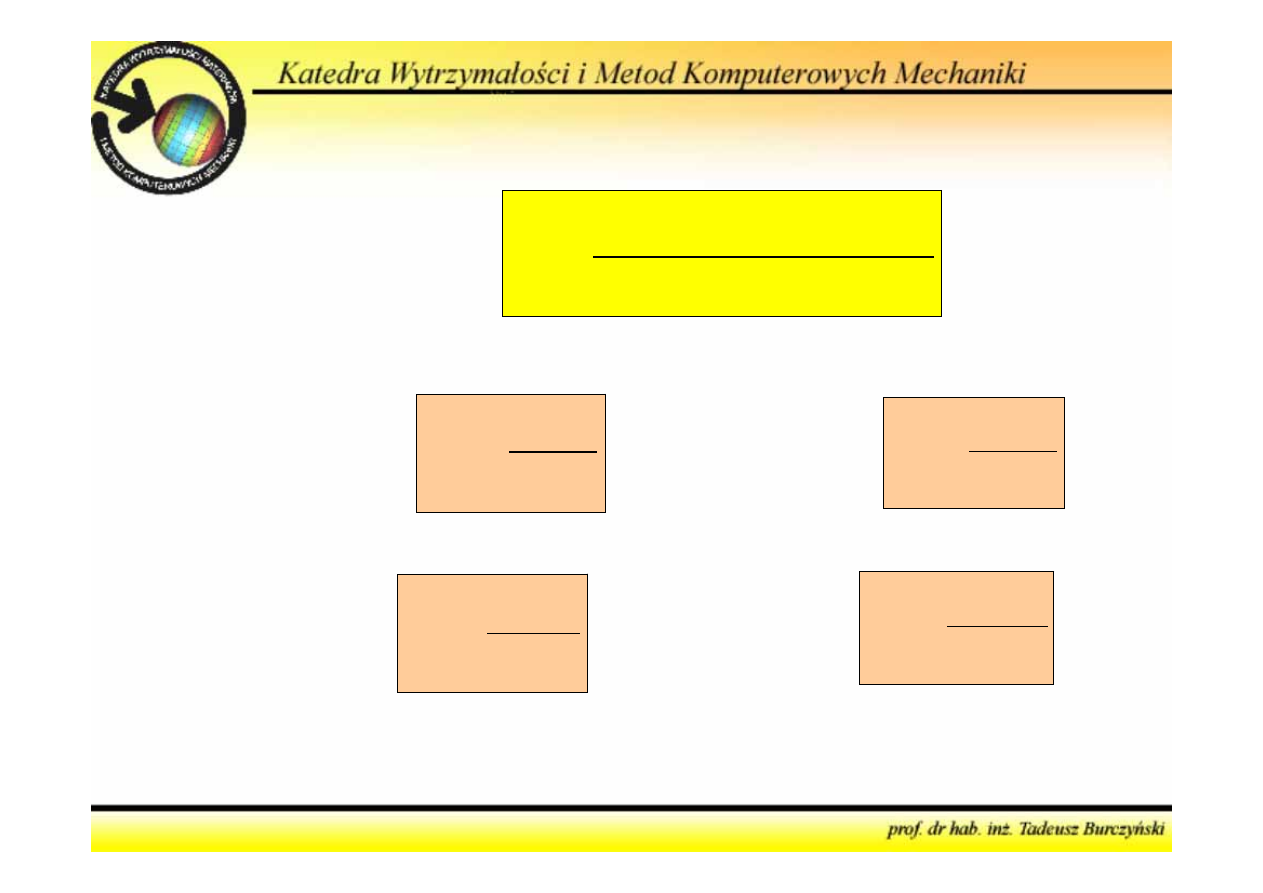
2
2
N l
V
EA
=
Rozciąganie:
Jeśli
N
oraz
EA
nie zależą od
x
2
2
s
s
M l
V
GI
=
Skręcanie:
Jeśli
M
s
oraz
GI
s
nie zależą od
x
2
2
g
M l
V
EI
=
Zginanie:
Jeśli
M
g
oraz
EI
nie zależą od
x
2
2
T l
V
GA
β
=
Ścinanie:
Jeśli
T
oraz
GA
nie zależą od
x
(
)
(
)
2
2
Sila wewnętrzna dlugosc
V
Sztywnosc
=
Jeśli
siła wewnętrzna
oraz
sztywność
nie zależą od
x
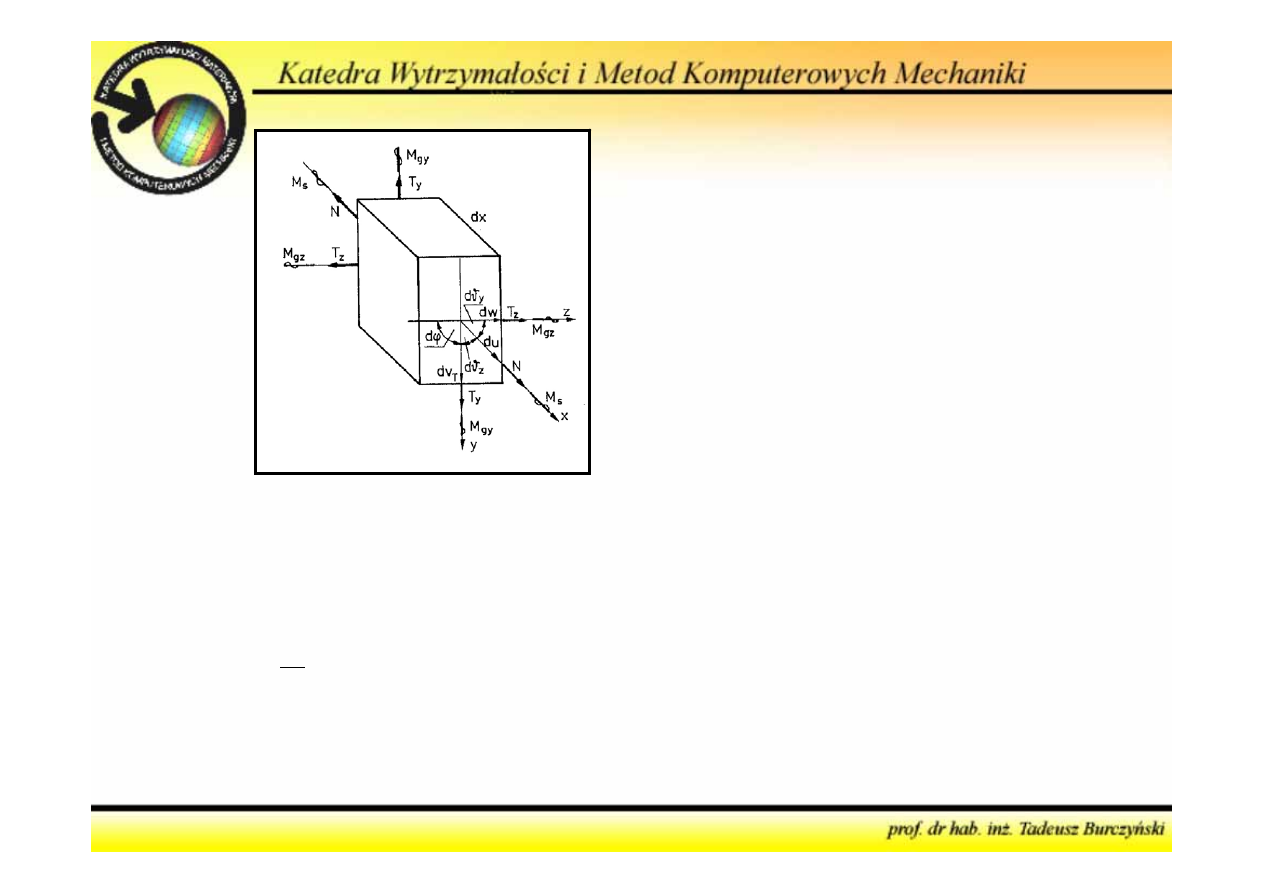
W przypadku ogólnym energia
sprężysta odkształcenia odcinka
pręta o długości dx będzie równa
sumie prac składowych sił
wewnętrznych
N, M
s
, M
gy
, M
gz
, T
y
, T
z
na odpowiadających im
przemieszczeniach
du, d
ϕ
, d
θ
y
, d
θ
z
,
d
υ
T
, dw
T
.
Jeśli odcinek pręta o długości dx uznać za odrębny układ, to
N, M
s
,
M
gy
, M
gz
, T
y
, T
z
należy traktować jako siły zewnętrzne
(
)
1
2
s
gy
y
gz
z
y
T
z
T
dV
Ndu M d
M d
M d
T d
T dw
ϕ
ϑ
ϑ
υ
=
+
+
+
+
+
Po uwzględnieniu, że przemieszczenia są następującymi
funkcjami składowych sił wewnętrznych
Ndx
du
EA
=
s
s
M dx
d
GI
ϕ
=
gy
y
y
M dx
d
EI
ϑ
=
gz
z
z
M dx
d
EI
ϑ
=
y y
T
T dx
d
GA
β
υ
=
z z
T
T dx
dw
GA
β
=
Otrzymamy zależność
2
2
2
2
2
2
1
2
gy
gz
y y
s
z z
s
y
z
M
M
T
N
M
T
dV
dx
EA GI
EI
EI
GA
GA
β
β
⎛
⎞
=
+
+
+
+
+
⎜
⎟
⎜
⎟
⎝
⎠
Energia sprężysta w pręcie prostym w
przypadku ogólnym
2
2
2
2
2
2
0
1
2
l
gy
gz
y y
s
z z
s
y
z
M
M
T
N
M
T
V
dx
EA GI
EI
EI
GA
GA
β
β
⎛
⎞
=
+
+
+
+
+
⎜
⎟
⎜
⎟
⎝
⎠
∫
Metody energetyczne wyznaczania
przemieszczeń
• Castigliana
•
Maxwella-Mohra
Metoda Maxwella-Mohra
W celu określenia dowolnego uogólnionego przemieszczenia
u
w
prętowym układzie liniowosprężystym metodą Maxwell-Mohra
wykonamy następujące operacje:
• Wyznaczymy siły
N, M
s
, M
gy
, M
gz
, T
y
, T
z
w prętach układu, wywołane
obciążeniem rzeczywistym
• Obciążamy układ siłą jednostkową odpowiadającą
poszukiwanemu przemieszczeniu
u
i wyznaczamy
N’, M
s
’, M’
gy
, M’
gz
,
T’
y
, T’
z
, które wywołuje ona w prętach
1
W miejsce jednostkowej siły wprowadźmy siłę
uogólnioną o wartości P (P=0), która wywoła dodatkowo
siły wewnętrzne:
'
2
' 2
'
2
'
2
' 2
' 2
0
(
)
(
)
(
)
1
2
(
)
(
)
(
)
gy
gy
s
s
l
s
y
gz
gz
y
y
y
z
z
y
z
M
PM
N PN
M
PM
EA
GI
EI
V
dx
M
PM
T
PT
T
PT
EI
GA
GA
β
β
⎛
⎞
+
+
+
+
+
+
⎜
⎟
⎜
⎟
=
⎜
⎟
+
+
+
⎜
⎟
+
+
⎜
⎟
⎝
⎠
∫
'
'
'
'
'
',
,
,
,
,
s
gy
gz
y
z
PN PM PM
PM
PT PT
0
P
V
u
P
=
∂
⎛
⎞
= ⎜
⎟
∂
⎝
⎠
1
1
Metoda Maxwella-Mohra
'
'
'
'
'
'
0
l
gy
gy
gz
gz
y y
y
s
s
z z
z
s
y
z
M M
M M
T T
NN
M M
T T
u
dx
EA
GI
EI
EI
GA
GA
β
β
⎛
⎞
=
+
+
+
+
+
⎜
⎟
⎜
⎟
⎝
⎠
∫
W celu określenia przemieszczenia
u
metodą Maxwella-Mohra dla
dowolnego liniowosprężystego układu prętowego należy dokonać
sumowania całek, obliczonych dla poszczególnych przedziałów
(prętów).
Statycznie niewyznaczalne układy
prętowe
Układ prętowy jest
statycznie niewyznaczalny
, jeśli nie można określić
reakcji w podporach czy sił wewnętrznych w przekrojach prętów,
posługując się wyłącznie równaniami równowagi.
Liczba sił statycznie niewyznaczalnych, czyli
hiperstatycznych
, równa
różnicy między liczbą wszystkich sił niewiadomych, a liczbą równań
równowagi, określa stopień statycznej niewyznaczalności układu
prętowego.
Statycznie niewyznaczalne układy
prętowe
Rozwiązanie każdego zadania statycznie niewyznaczalnego oprócz
wykorzystania warunków równowagi wymaga uwzględnienia
geometrycznych i fizycznych aspektów odkształcalności ciała.
Formułuje się w tym celu trzy grupy zależności:
A. Równania równowagi,
B. Warunki geometryczne
C. Związki fizyczne
Wyróżnić można dwie podstawowe metody rozwiązywania zadań
statycznie niewyznaczalnych:
- metodę sił - metodę przemieszczeń
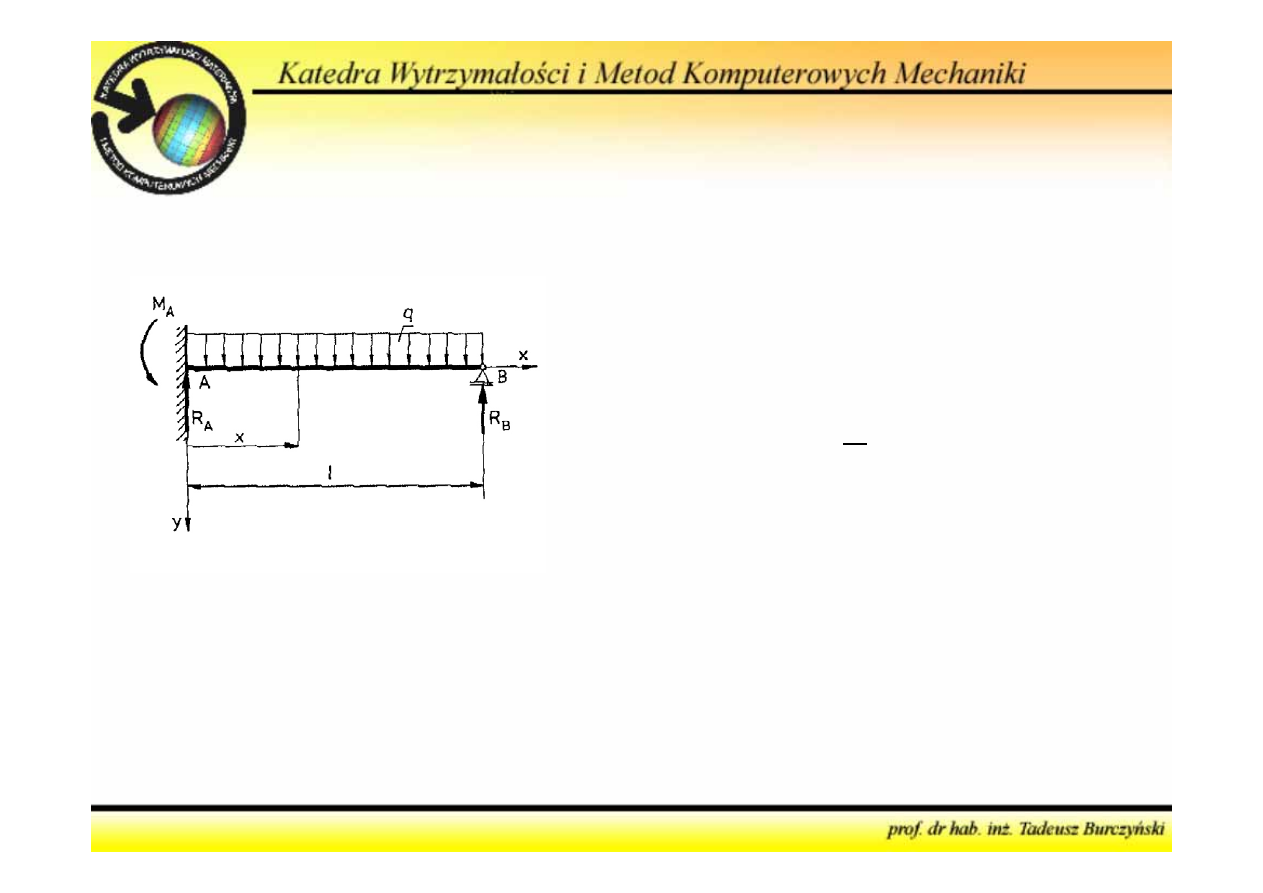
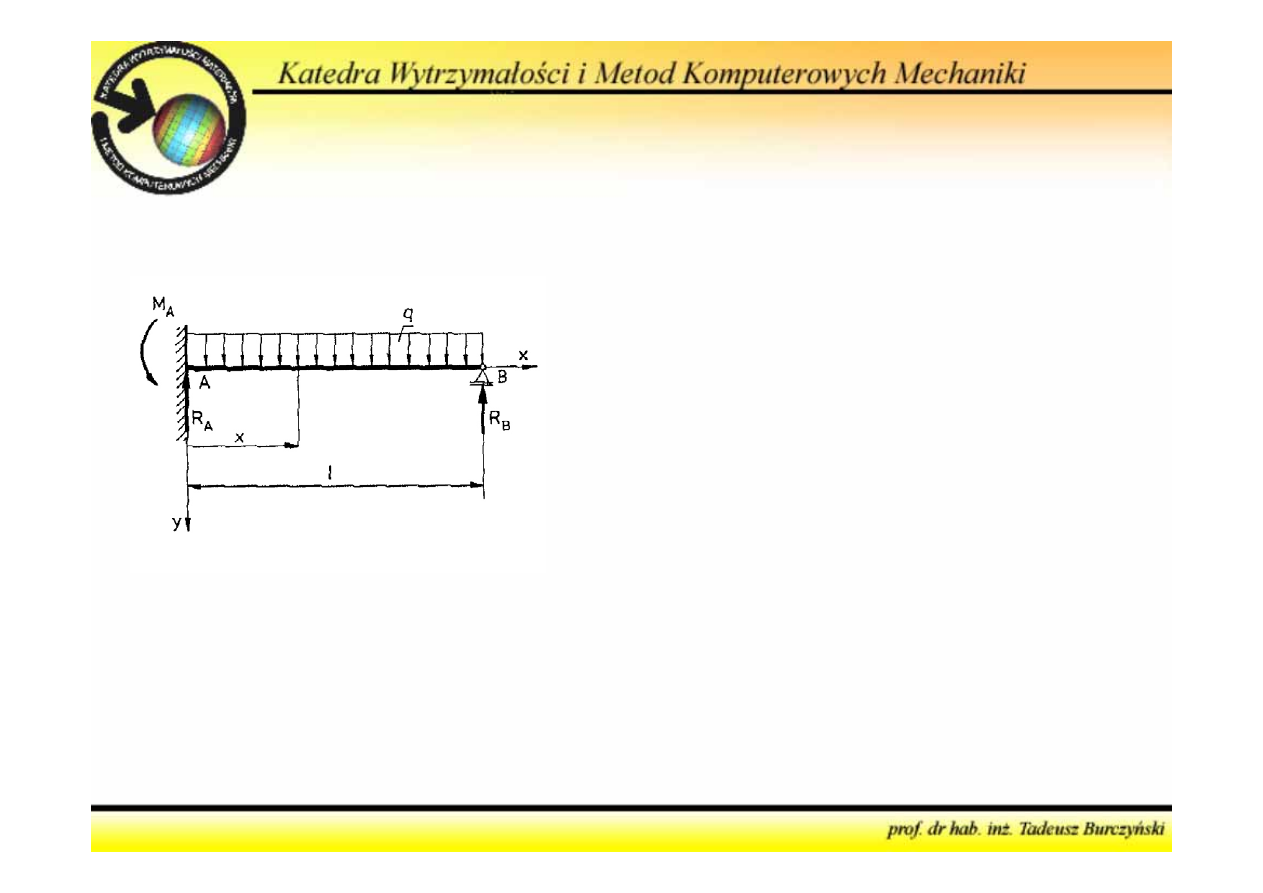
Równania równowagi
2
0
1
0
2
A
B
A
A
ql R
R
M
R l
ql
−
−
=
−
+
−
=
Równania:
2
Niewiadome:
3
Zadanie jednokrotnie (
3-2
) statycznie niewyznaczalne
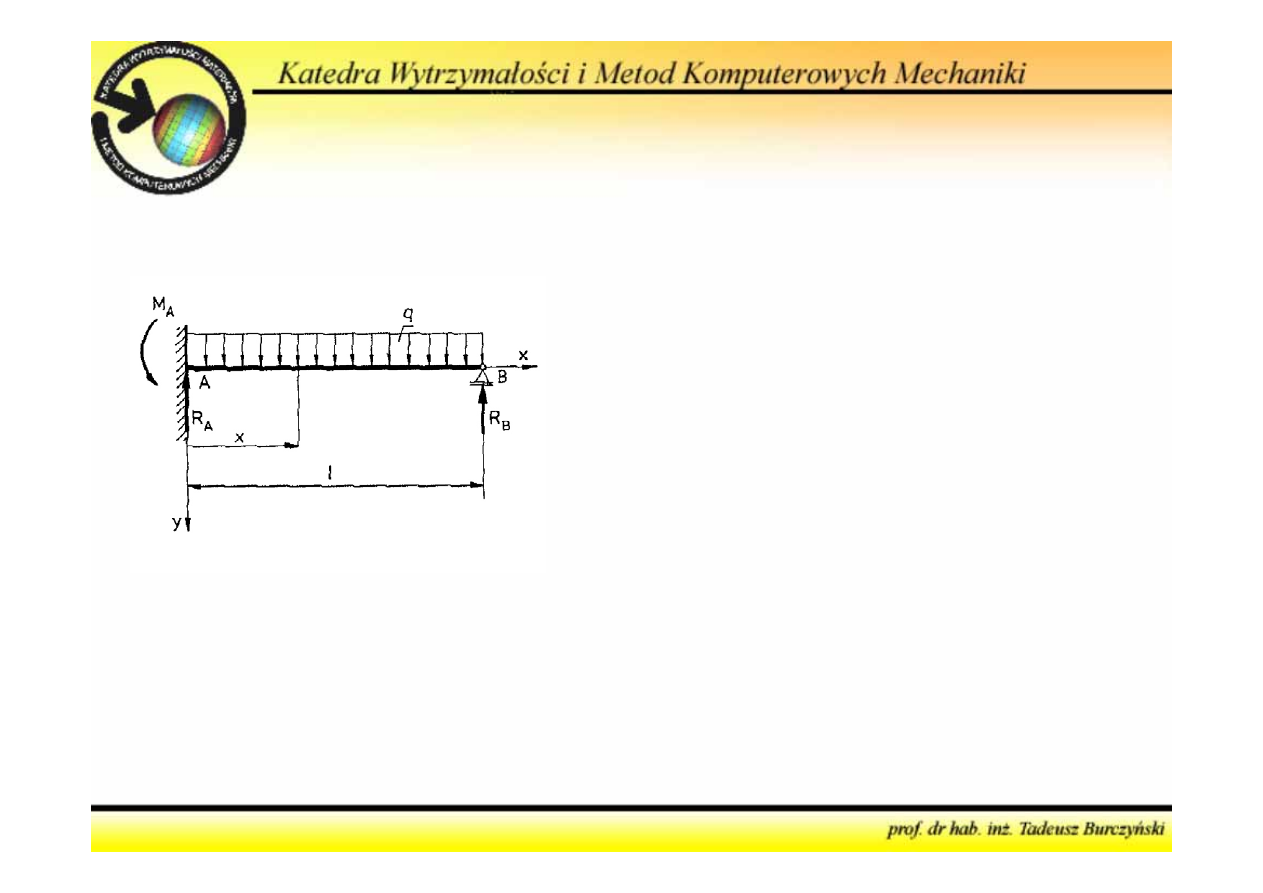
Warunki geometryczne
0
B
υ
=
Reakcja R
B
(traktowana jako wielkość
hiperstatyczna) jest spowodowana
podparciem belki w punkcie B, co odpowiada
następującemu warunkowi geometrycznemu
Związki fizyczne
Związek fizyczny powinien uzależniać
υ
B
od
sił działających na belkę oraz jej własności
sprężystych.
Okazuje się, że warunek geometryczny
υ
B
=0 jest po prostu dodatkowym warunkiem
brzegowym.
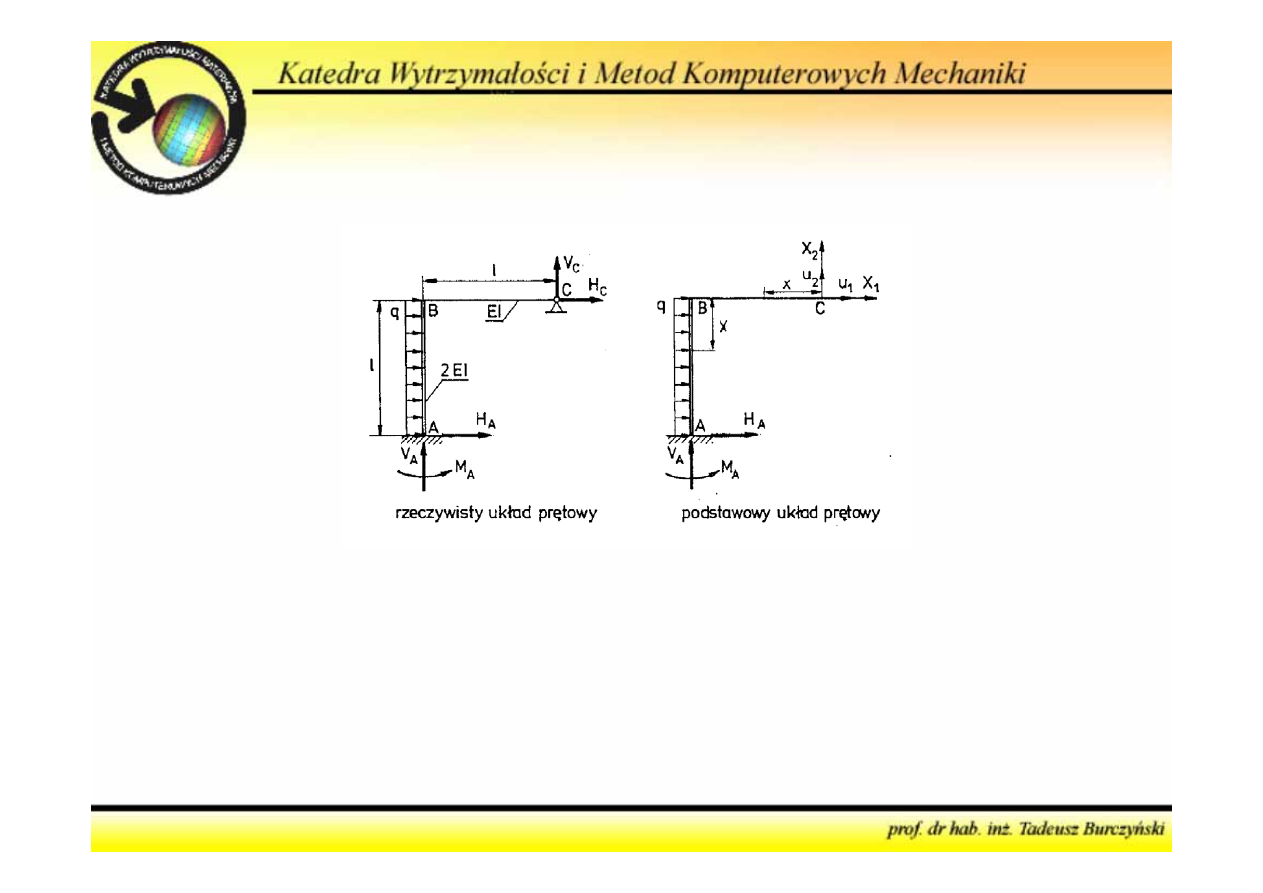
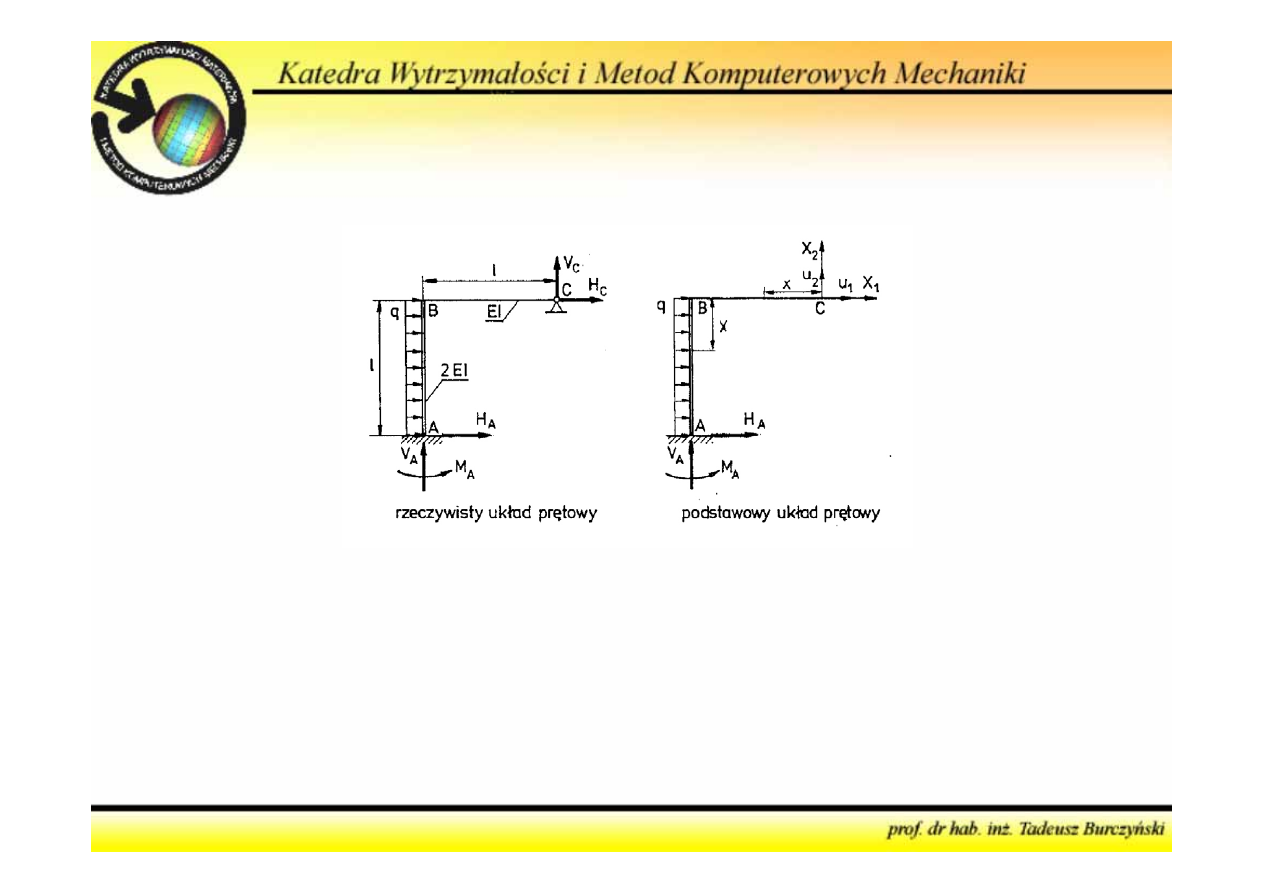
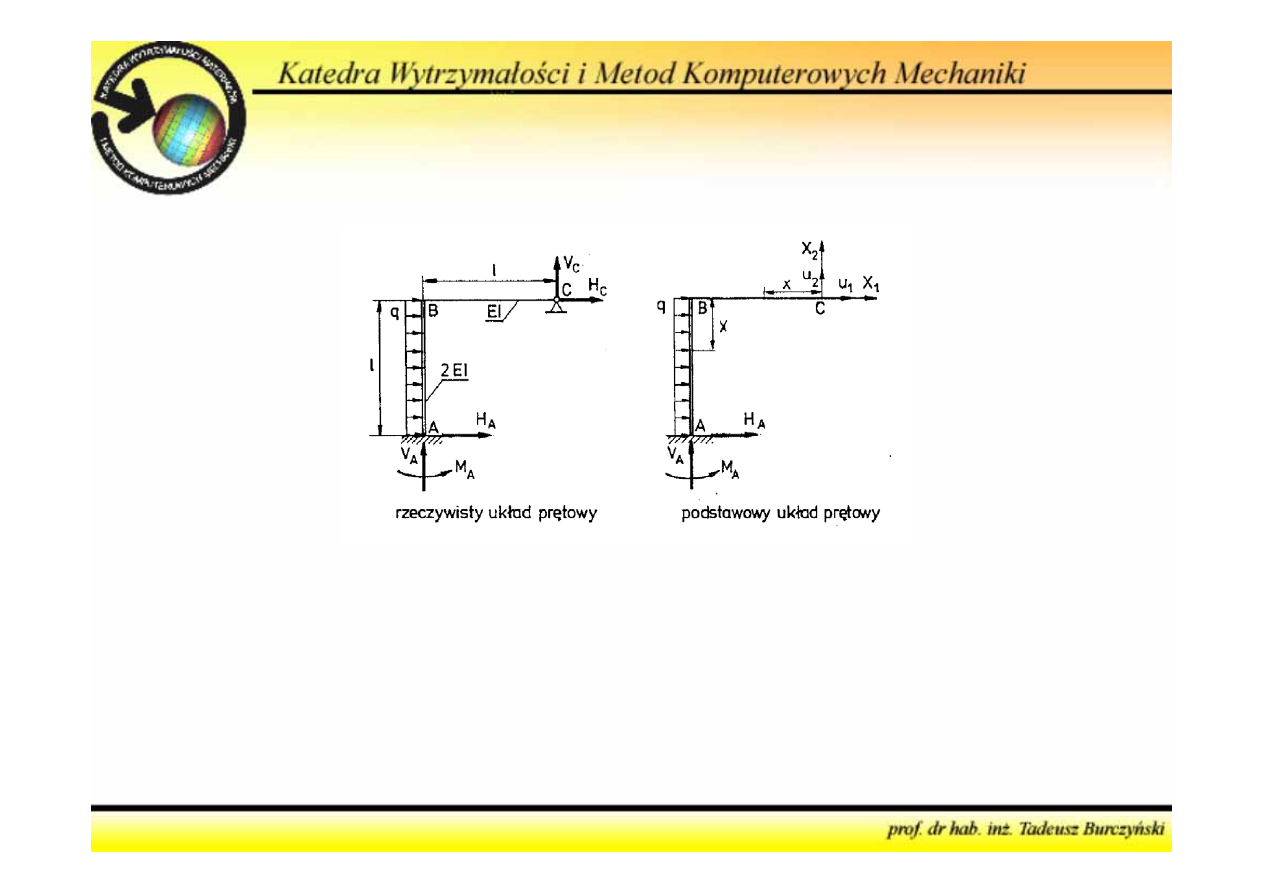
Metoda sił
1. Określić rodzaj i liczbę wielkości podporowych i sformułować
równania równowagi
Algorytm postępowania
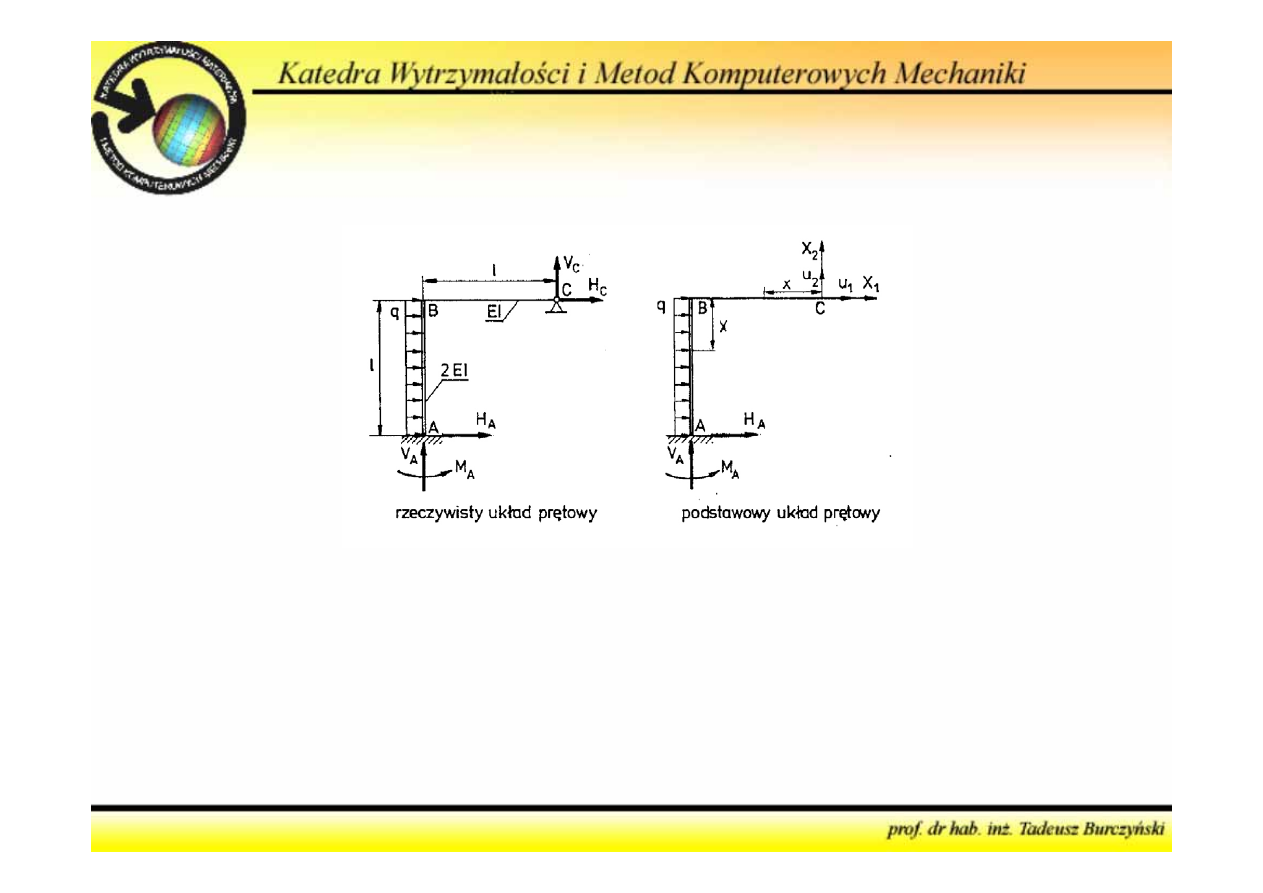
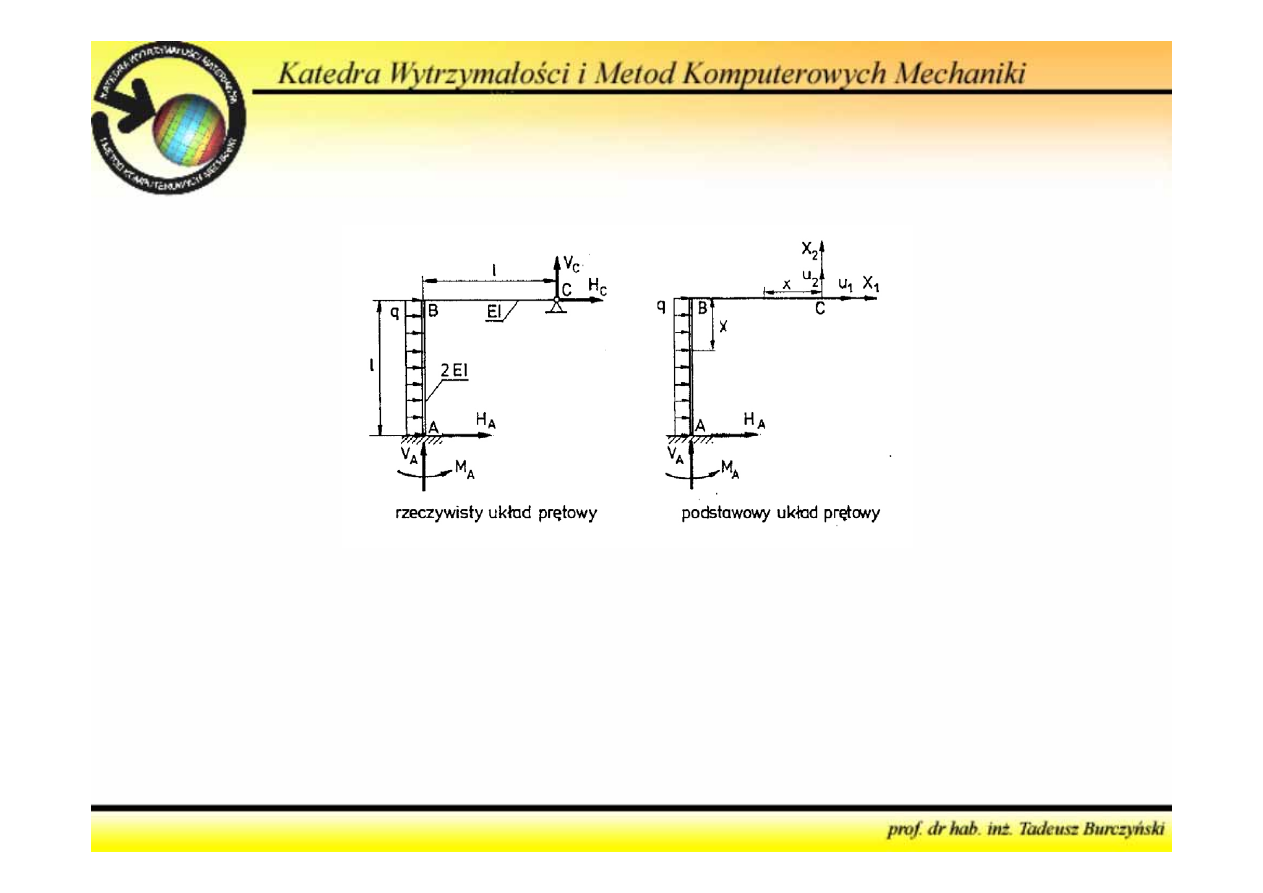
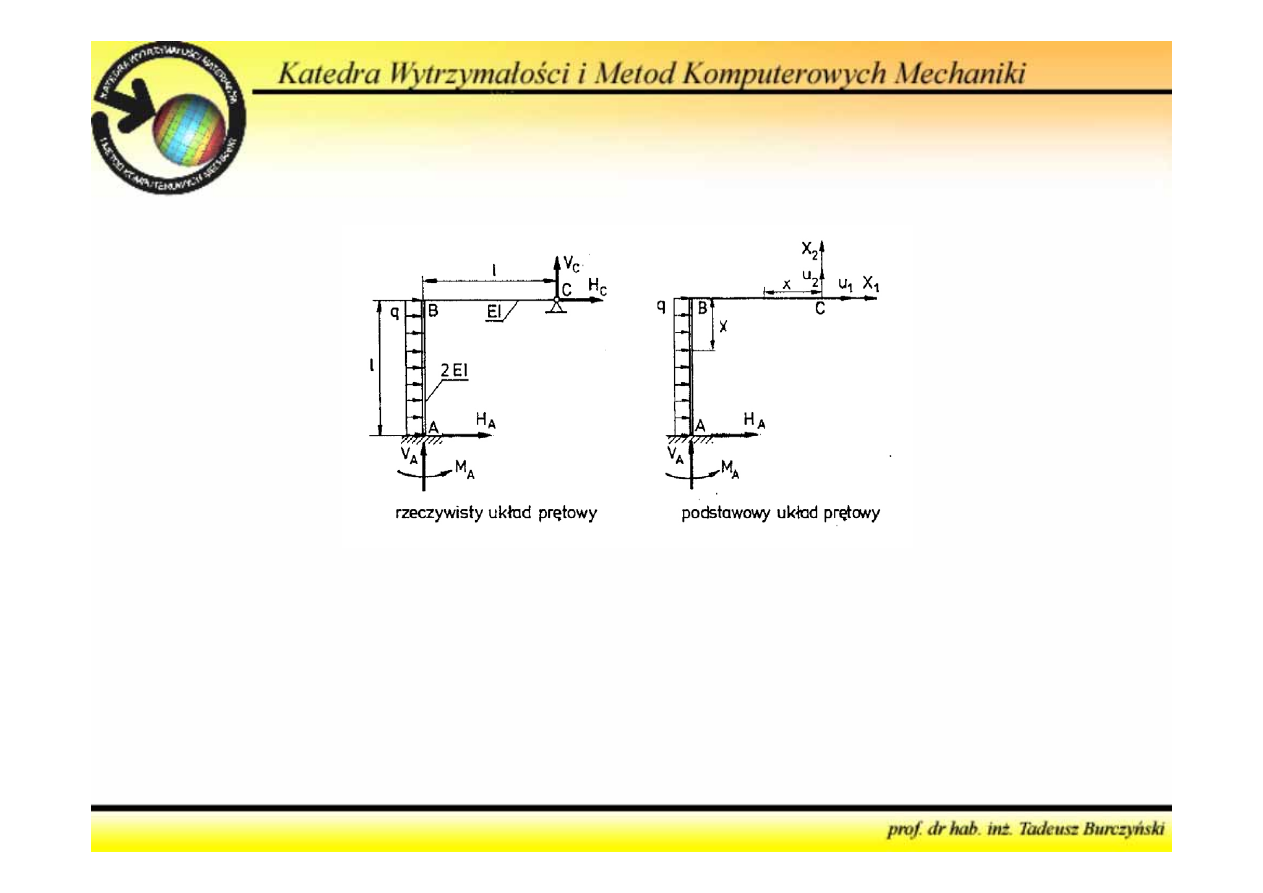
Metoda sił
- Punkt C – podpora przegubowa stała –
dwie reakcje
(pozioma i pionowa)
- Punkt A – utwierdzenie –
trzy reakcje
(pozioma, pionowa i moment)
równania
równowagi
2
0
0
1
0
2
A
C
A
C
C
C
A
H
H
ql
V
V
V l H l
ql
M
+
+
=
+
=
−
−
+
=
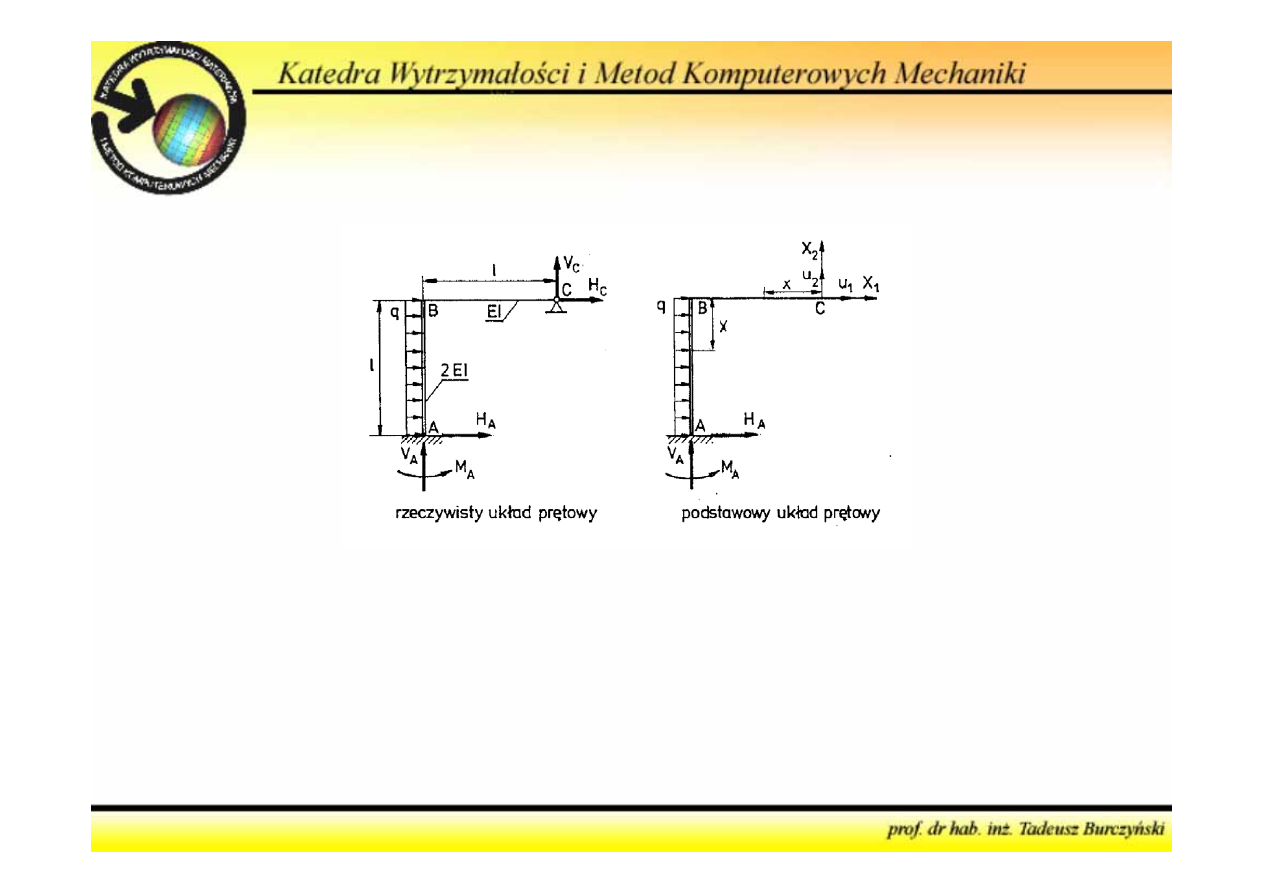
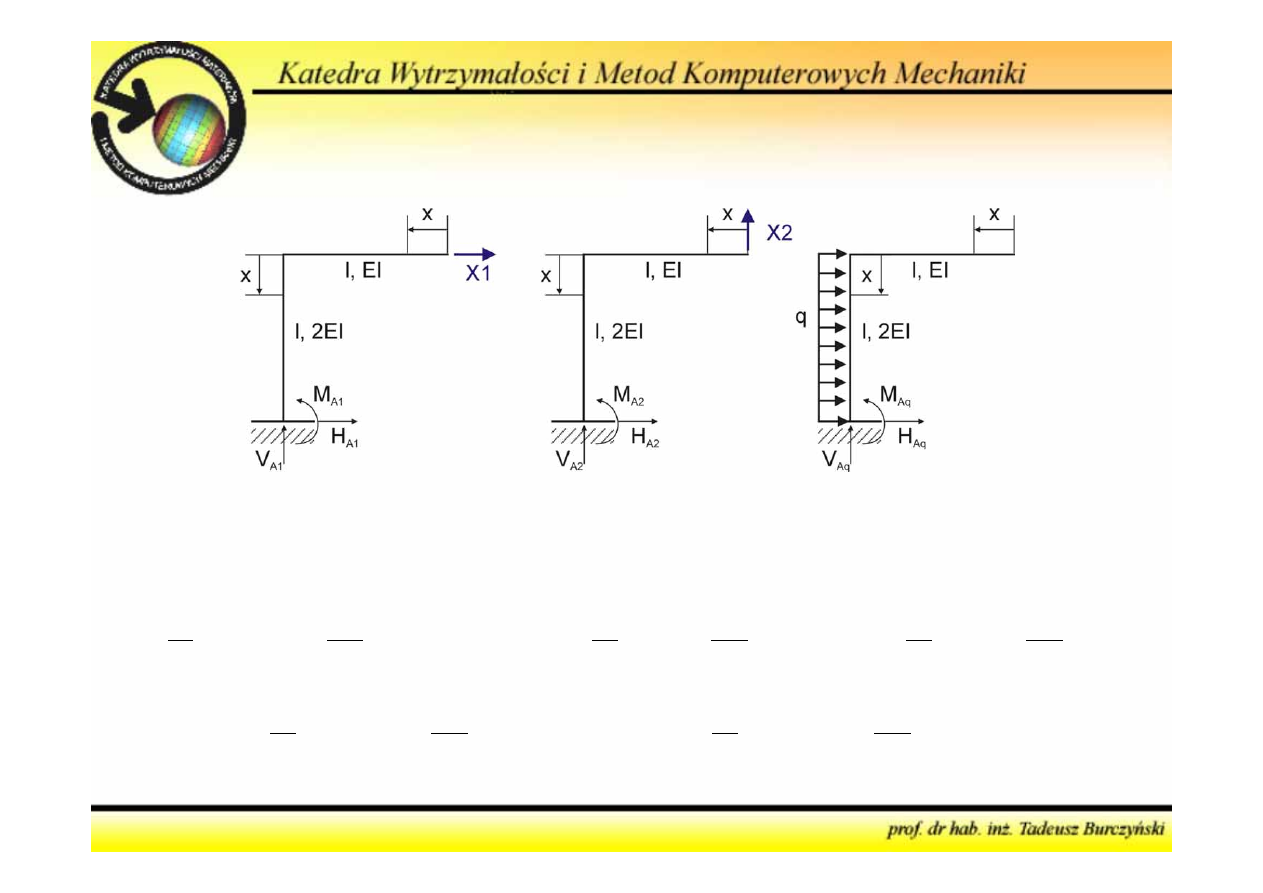
Metoda sił
2. Obliczyć stopień statycznej niewyznaczalności i utworzyć
podstawowy układ prętowy
Algorytm postępowania
Metoda sił
- Liczba niewiadomych
5
(reakcje)
- Liczba równań
3
5 – 3 = 2
- rama jest dwukrotnie
statycznie niewyznaczalna
Wielkości hiperstatyczne:
X
1
=
H
c
X
2
=
V
c
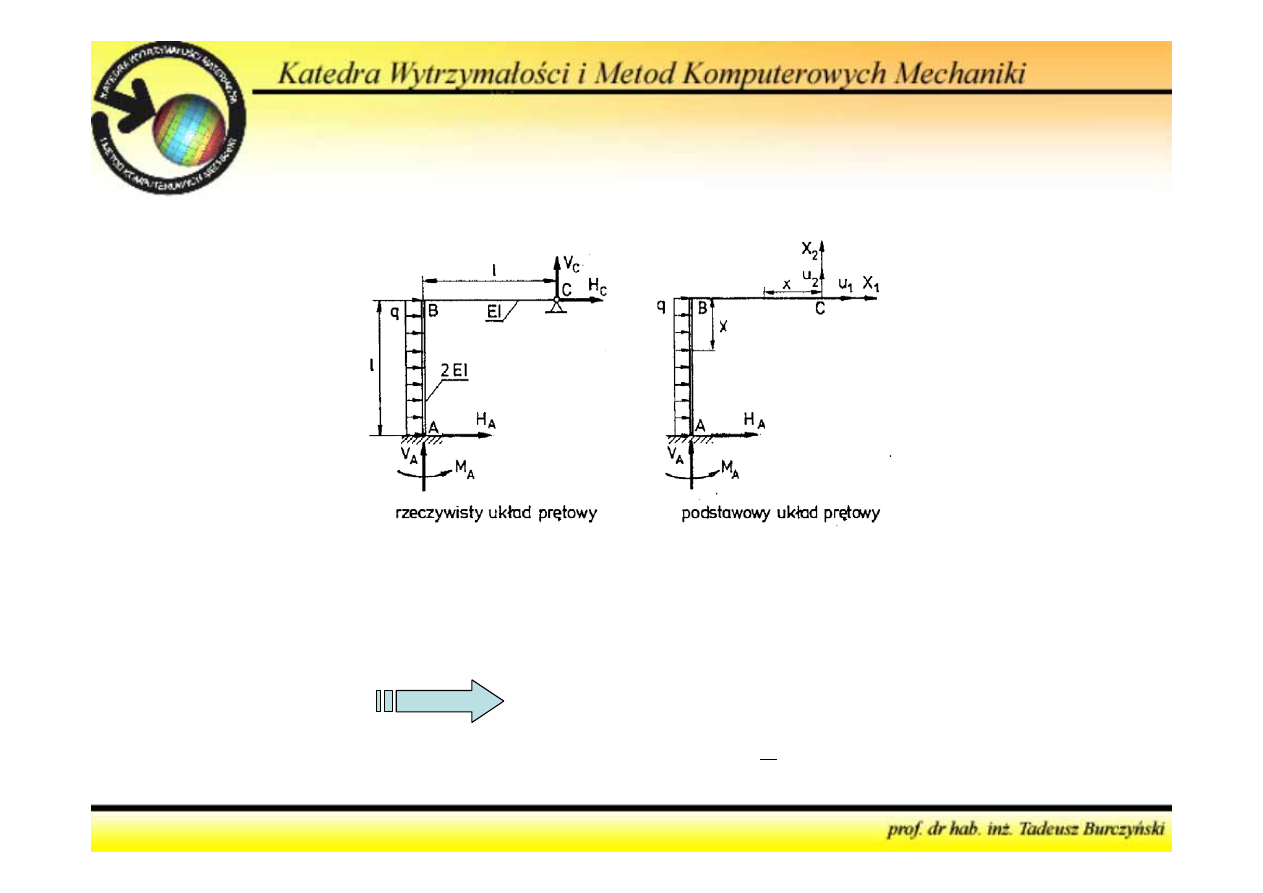
Metoda sił
3. Określić warunki geometryczne oraz związki fizyczne i
sformułować na ich podstawie równania kanoniczne metody sił
Algorytm postępowania
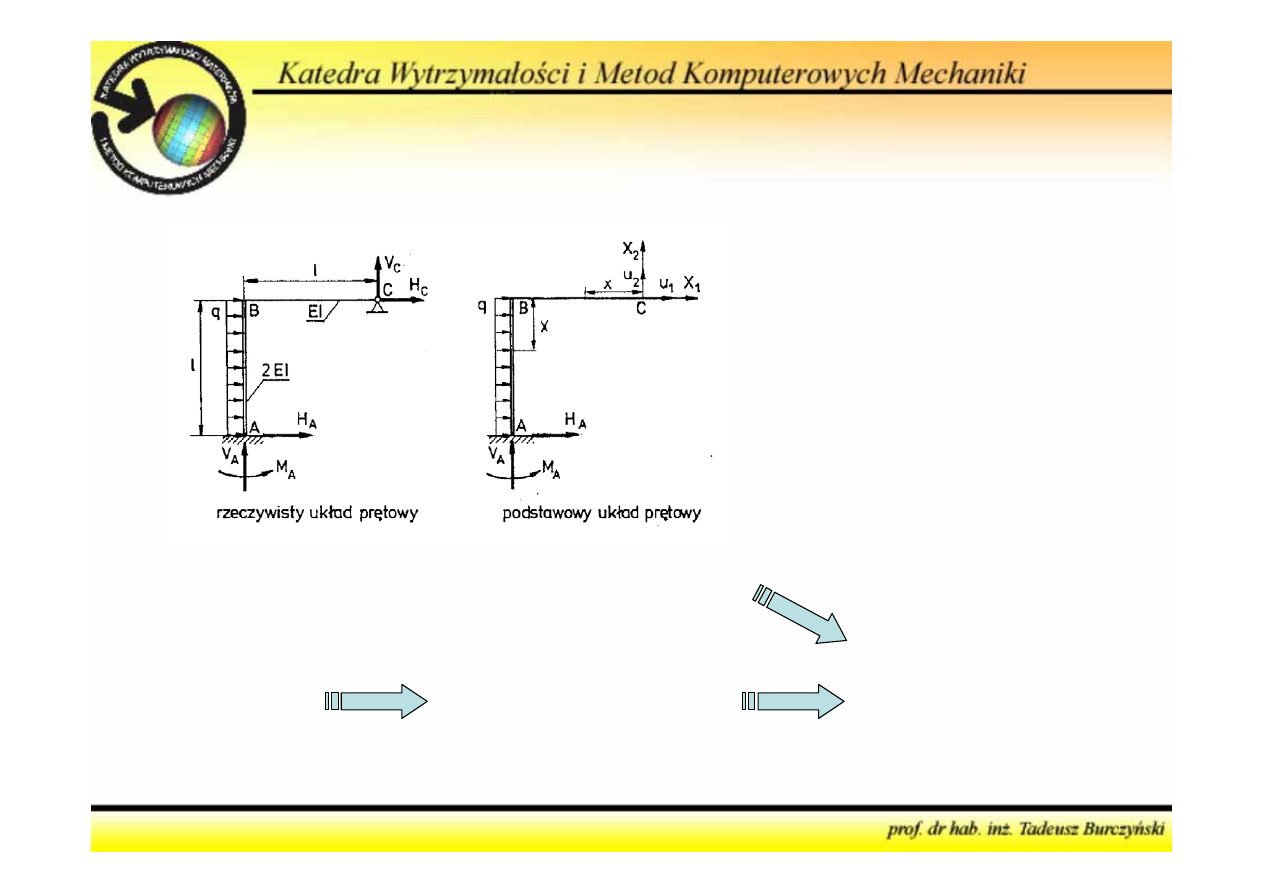
Metoda sił
u
1
= 0, u
2
= 0
Związki
fizyczne
1
11
1
12
2
1
2
21
1
22
2
2
P
P
u
f X
f X
u
f X
f X
=
+
+ Δ
=
+
+ Δ
11
1
12
2
1
21
1
22
2
2
0
0
P
P
f X
f X
f X
f X
+
+ Δ =
+
+ Δ =
1
2
,
P
P
Δ Δ
- część przemieszczeń
u
1
i u
2
spowodowana
działaniem obciążenia q.
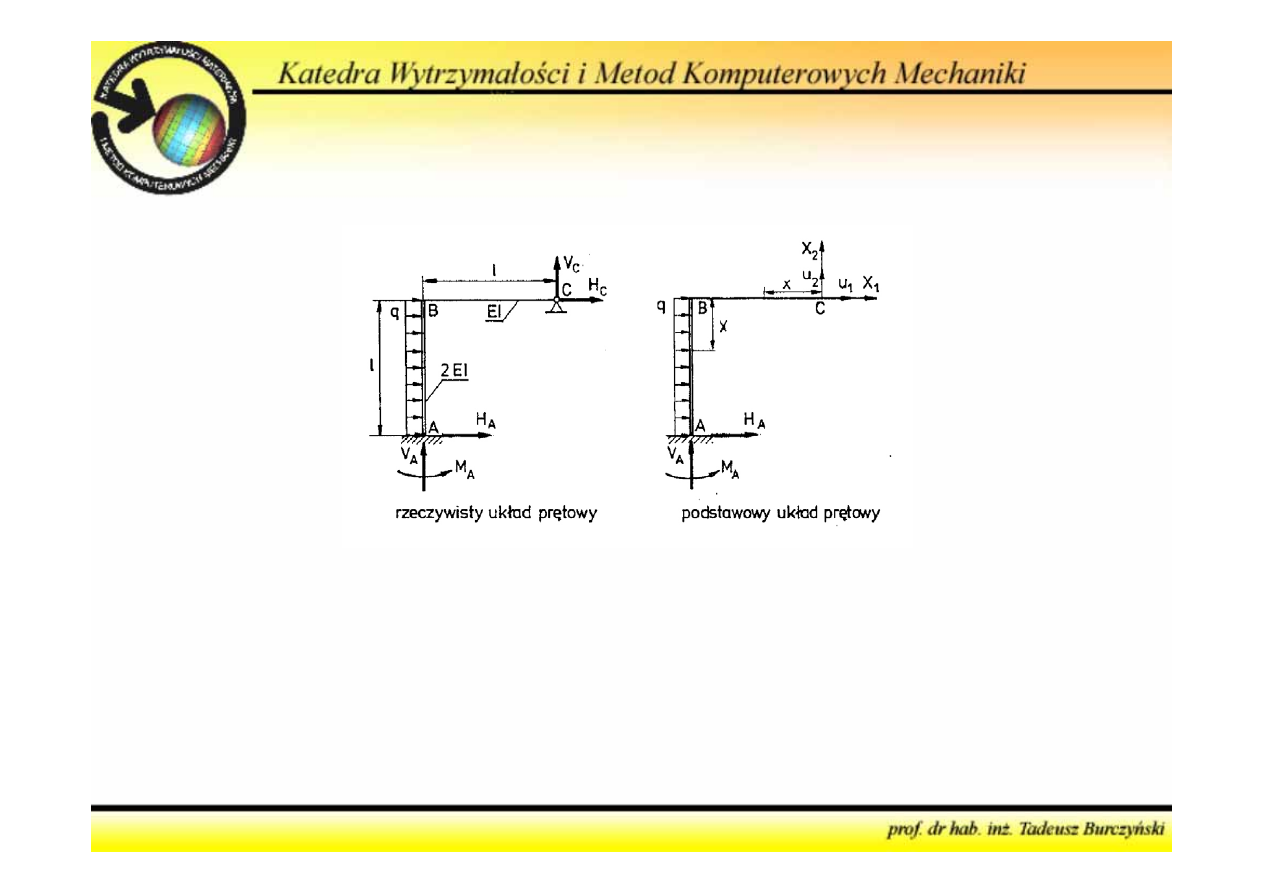
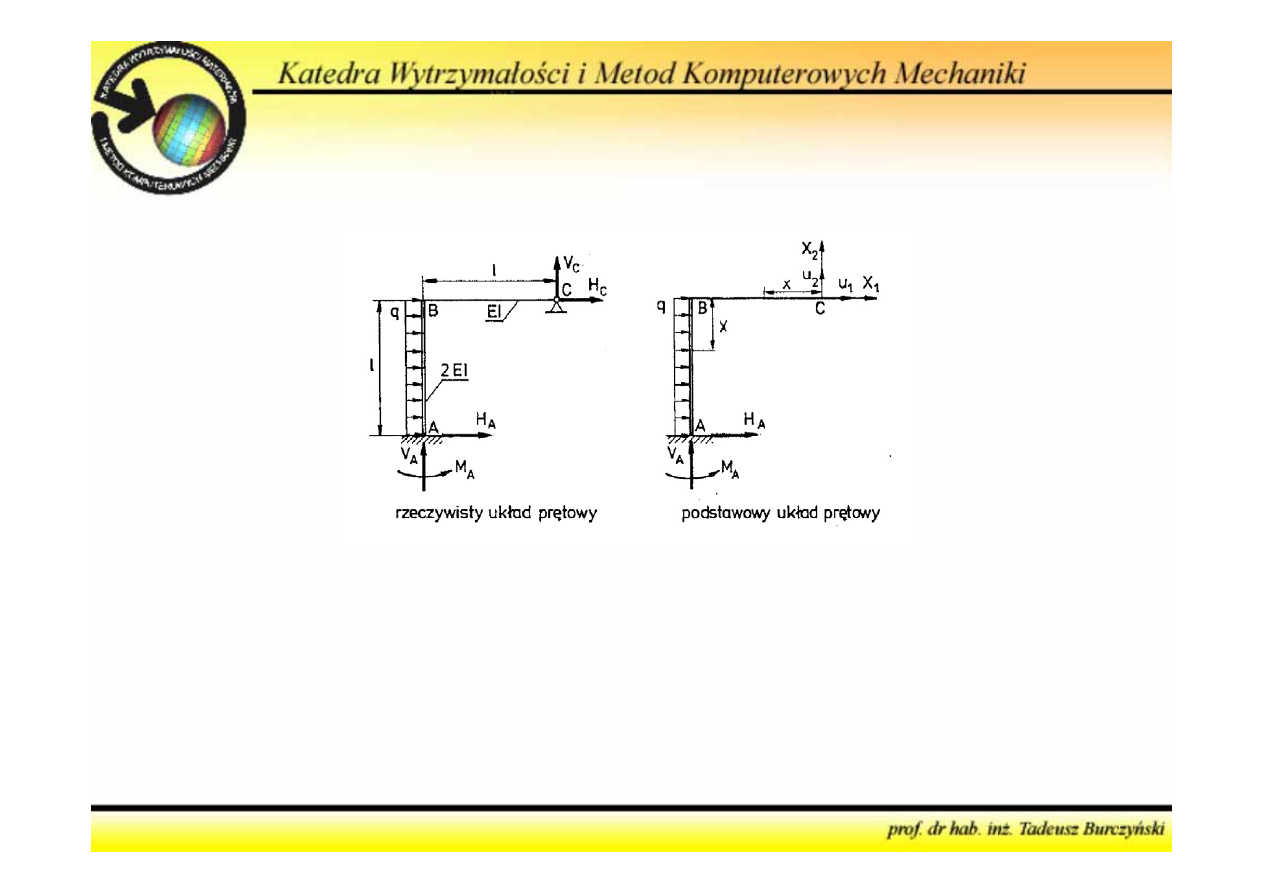
Metoda sił
4. Obliczyć współczynniki równań kanonicznych metody sił
Algorytm postępowania
Metoda sił
Algorytm postępowania
12
12
11
22
21
21
0
0
1
1
2
l
l
g
g
g
g
f
M M dx
M
M dx
f
EI
EI
=
+
=
∫
∫
2
2
11
11
21
0
0
1
1
2
l
l
g
g
f
M dx
M dx
EI
EI
=
+
∫
∫
1
1
11
2
21
0
0
1
1
2
l
l
P
g P
g
g P
g
M
M dx
M
M dx
EI
EI
Δ =
+
∫
∫
2
2
22
12
22
0
0
1
1
2
l
l
g
g
f
M dx
M
dx
EI
EI
=
+
∫
∫
2
1
12
2
22
0
0
1
1
2
l
l
P
g P
g
g P
g
M
M dx
M
M
dx
EI
EI
Δ =
+
∫
∫
M
g11
, M
g21
M
g12
, M
g22
M
g1P
, M
g2P
1
2
1
1
X
X
=
=
Metoda sił
5. Wyznaczyć z równań kanonicznych metody sił wielkości
hiperstatyczne
Algorytm postępowania
1
2
X
X
Metoda sił
6. Wykorzystując równania równowagi, znaleźć pozostałe
niewiadome
Algorytm postępowania
Metoda sił
7. Sformułować równania i narysować wykresy sił wewnętrznych
Algorytm postępowania
Metoda sił
8. Wyznaczyć poszukiwane przemieszczenia
Algorytm postępowania
Zasada minimum energii sprężystej
Menabrei-Castigliana
Energia sprężysta układu statycznie niewyznaczalnego V jest wyrażona
przez znane siły zewnętrzne (obciążenia) i niewiadome wielkości
hiperstatyczne X
1
, ..., X
n
oraz niehiperstatyczne.
Jeżeli wykorzystując równania równowagi, uzależni się niewiadome
niehiperstayczne od wielkości hiperstatycznych oraz obciążeń, energia
V stanie się funkcją X
1
, ..., X
n
, jako zmiennych niezależnych.
Warunki geometryczne, jakie muszą spełniać przemieszczenia u
1
, ...,
u
n
, odpowiadające wielkościom hiperstatycznym X
1
, ...,X
n
, można
zapisać nastepująco
u
1
= 0, ..., u
n
= 0
Zasada minimum energii sprężystej
Menabrei-Castigliana
Stosując metodę Castigliana, można określić przemieszczenia z
wykorzystaniem do tego celu energii sprężystej V(X
1
, ..., X
n
)
1
1
, ... ,
n
n
V
V
u
u
X
X
∂
∂
=
=
∂
∂
związki
fizyczne
Po podstawieniu do związków geometrycznych:
1
0, ... ,
0
n
V
V
X
X
∂
∂
=
=
∂
∂
Zasada minimum energii sprężystej
Menabrei-Castigliana
Spośród wszystkich możliwych zbiorów
wielkości X
1
, ..., X
n
zbiorem rzeczywistych
wielkości hiperstatycznych jest ten, dla
którego energia sprężysta całego układu
prętowego V osiąga wartość minimalną.
Wyszukiwarka
Podobne podstrony:
15 ugiecia metody energetyczne imimid 16232
Metody energetyczne zastosowanie twierdzenia Menabre'a Zad 1(1)
16 Metody energetyczne wykład
13 metody energetyczneid 14715
09 metody energetyczneid 7958
Metody energetyczne, Studia, Wytrzymałość materiałów
Metody energentyczne część 1
Metody energentyczne część 2
MN energetyka zadania od wykładowcy 09-05-14, STARE, Metody Numeryczne, Część wykładowa Sem IV
metody otrzymywania soli, ENERGETYKA AGH, sem 2, chemia
chemiczne metody oczyszczania, Ekologia, Gospodarka odpadami, Energetyka, Ścieki przemysłu spożywcze
pyt 10,11 , Podstawowa i całkowita przemiana materii, potrzeby energetyczne człowieka, metody pomiar
21 Podstawy metodyczne analizy energetyczno ekologicznej obiektu budowlanego w pełnym cyklu istnieni
więcej podobnych podstron