GRUPA A
1.Co to jest równoważność układów (A)=(B)
-podstawowa definicja równoważności:
Dane układy sił (A) i (B) nazywamy równoważnymi wtw gdy wykonując na jednym z nich skończoną liczbę przekształceń elementarnych typu α i β w wyniku otrzymamy układ drugi.
Relacja równoważności jest:
- zwrotna (A)=(A)
- symetryczna jest (A)=(B) to (B)=(A)
- przechodnia (A)=(B) i (B)=(C) to (A)=(C)
Co to jest redukcja układów
W związku z możliwością identycznych działań użytych układów sił działających na to samo ciało pojawia się zagadnienie zastąpienia jednego układu sił innym na ogół prostszym, ale o identycznym działaniu, zagadnienie to nosi nazwę redukcji układu.
Tw.
Dowolny układ sił jest równoważny układowi złożonemu z wektora sumy tego układu zaczepionego w dowolnie wybranym biegunie oraz pary sił o momencie układu obliczonego momentu względem tego bieguna 
2.Co to jest energia mechaniczna(praca mechaniczna) i jaki ma związek z polem zachowawczym.
En.mechaniczna to suma energii potencjalnej i kinetycznej
-E(t)=Ek(t) +Ep(t)
-(praca)L=ΔEk+ ΔEp= ΔE
-praca siły czynnej działającej na PM w polu potencjalnym w danym przedziale czasu jest równa przyrostowi energii mechanicznej w tym przedziale czasu.
-w układzie zachowawczym Em ma wartość stałą, jest to tzw.zasada zachowania Em.
3.Rzut wektora ![]()
(ax,ay,az) na wektor ![]()
(bx,by,bz)

4.Podstawowe i zastępcze równania równowagi statycznej dla układu płaskiego.
podstawowe
![]()
![]()
![]()
Zastępcze:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
5.Reakcje więzów
6. Warunek geometrycznej niezmienności, przykłady
V=3T-p-2b-3, b-przeguby, 2b-równań więzów, T-tarcze, p-pręty (wahacze),
V=3(T-1)-(p+2b) , 3T-stopni swobody
3(T-1) -liczba stopni swobody układu względem układu (tarczy) odniesienia
(p+2b) -liczba więzów (więzi)- liczba więzów między tarczami
V>0 -więcej stopni swobody niż równań więzów- układ geometrycznie zmienny
V=0 -liczba stopni swobody i liczba więzów są sobie równe, układ może być geometrycznie niezmienny
V<0 -układ przesztywniony i więcej więzów niż możliwości ruchowych może być geometrycznie niezmienny
V≤0 -jest tylko warunkiem koniecznym geometrycznej niezmienności
7.Układy współrzędnych i ich równania toru:
-kartezjański: xi=fi(t), i=1,2,3
-biegunowy: r=Ψ1(t); φ= Ψ2(t)
-walcowe: ρ= φ1(t); φ1= φ2(t); z= φ3(t)
-naturalne: ![]()
![]()
8.Hodograf prędkości i przyśpieszenia:
Jest to miejsce geometryczne końców kolejnych wektorów prędkości odkładanych od dowolnie wybranego bieguna. Wektor przyśpieszenia āi jest styczny do hodografu prędkości ![]()
w punkcie ![]()
i.
9.Oś środkowa układu sił- jest to miejsce geometryczne punktu względem których wektor momentu jest równoległy do wektora sumy lub moment jest równy zero.
![]()
-równanie osi środkowej układu
10.Wyznacz siłę w układzie biegunowym
GRUPA B
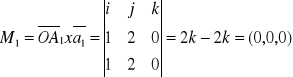
Zad. 1 Zredukować układ A do punktu 0.

zredukować 0(0,0)
![]()
![]()
![]()
![]()
![]()
= O![]()
![]()
= O![]()
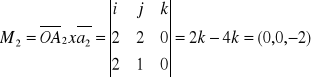
Mg=(0,0,-2) ![]()
![]()
R=0
Zad.2 Metoda Rittera
Kratownice możemy zawsze podzielić przekrojem na dwie tarcze T1 i T2. Jeżeli przekrój przecina 3 nie przecinające się w jednym punkcie pręty to nazywamy go przekrojem Rittera. Rozcinając przekrojem pręty to znaczy że usuwamy więzy jakimi są te pręty- ich reakcje to siły w rozciętych prętach.
Punkt Rittera- jest punktem w którym przecinają się kierunki dwóch pozostałych rozciętych prętów.
3.Energia kinetyczna
![]()
,zatem L=Ek(t2)-Ek(t1)= ΔEk
L=ΔEk
Zasada równoważności pracy i energi kinetycznej.
Praca siły czynnej działającej na punkt materialny w danym przedziale czasu jest równa przyrostowi energii kinetycznej w tym przedziale czasu.
4.Chwilowy środek obrotu.Co to jest i jak go wyznaczamy.
W płaszczyźnie kierowniczej znaleźć można taki punk C, którego prędkość chwilowa jest równa 0.
![]()
czyli jest także ![]()
![]()
Punkt C nosi nazwę chwilowego środka obrotu
5.WKW geometrycznej niezmienności układu złożonego z dwóch tarcz.
V=3T-p-2b-3≤0 oraz aby kierunki prętów między nimi nie przecinały się w jednym właściwym lub niewłaściwym punkcie.
WKW g. niezmienności układu trzech tarcz jest aby V=3T-p-2b-3≤0 oraz nie wystąpiły przypadki przedstawione na rys.
6.Więzy
7.Równania równowagi statycznej dla przestrzennego układu sił
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Sumy rzutów sił na osie x1,x2,x3 muszą być równe 0.
Sumy momentow względem x1,x2,x3 muszą być równe 0.
Zad. 8 Środek równoległego układu wektorów.
Ciału sztywnemu przyporządkuje się pewien szczególny punkt „C” zwany środkiem masy ciała sztywnego. W punkcie zaczepiona jest siła ciężkości ciała G=m*g skierowana zawsze w jedną stronę bez względu na położenie ciała w przestrzeni. Punkt „C” jest środkiem równoległego układu sił ![]()
zatem

czyli: ![]()
; ![]()
; ![]()
gdzie: ![]()
z powyższych wzorów wynika
![]()
; ![]()
; ![]()
Wyszukiwarka
Podobne podstrony:
mechanika ściąga
mechanika sciaga
mechanika, sciaga mechana(2), 1 zasada dynamiki-jeśli na ciało nie działa żadna siła lub siły działa
mechana sciaga mala , GRUPA A
ściągi mech, mechanika sciaga 3, PARA SIŁ Para sił to układ 2 sił równoległych równych, co do wartoś
PYTANIA NA II KOŁO Z MECHANIKI ściaga
mechanika sciaga projekt
mechana ściąga (1)
mechana sciaga II, Materiały na studia, Polibuda, AiR Semestr I, Mec, bonus
mechanika ściąga, Politechnika Poznańska, Elektrotechnika, Mechanika
mechanika ściąga, Politechnika Poznańska, Elektrotechnika, Mechanika
mechanika sciaga 3, PWR, MiBM WME, Mechanika, ściągi mech
odpowiedzi mechanika - sciaga, Politechnika Wrocławska PWr, Ochrona Środowiska, Mechanika płynów
mechanika+ściąga
mechanika ściąga v1.1, Politechnika Poznańska, Elektrotechnika, Mechanika
mechanika sciaga 1, Studia - Budownictwo, Mechanika ogólna
Mechanika ściaga poprawa
więcej podobnych podstron