231 (26)
230 Rozdział 4. Ocena przebiegów w układach regulacji ...
Zatem musi być spełniony układ równań:
hi (®) + hi (s) = 0 —C0/n (s) + (C20 — C„) lii (s) = 0
Stąd:
(7)
~hi (s) = ^22 («) 1
ki (s) = (s) 1
Widać, że w zależności od wybranego punktu pracy obiektu transmitancje korektora
są różne.
Dla danego z zad. 2.14 punktu pracy mamy:
(8)
I12 (s) = -la (s) \ hi (s) = \h\ (*) J
Dla elementów korektora leżących na przekątnej głównej L (s) można przyjąć dowolne postaci transmitancji.
Weźmy:
hi (5) = 1, (9)
la (s) = 1,
zapewniając własności dynamiczne układu w torach głównych takie same jak w układzie bez odsprzęgania.
Wtedy na podstawie zależności (8) mamy:
L(s) =
1
1
L 2

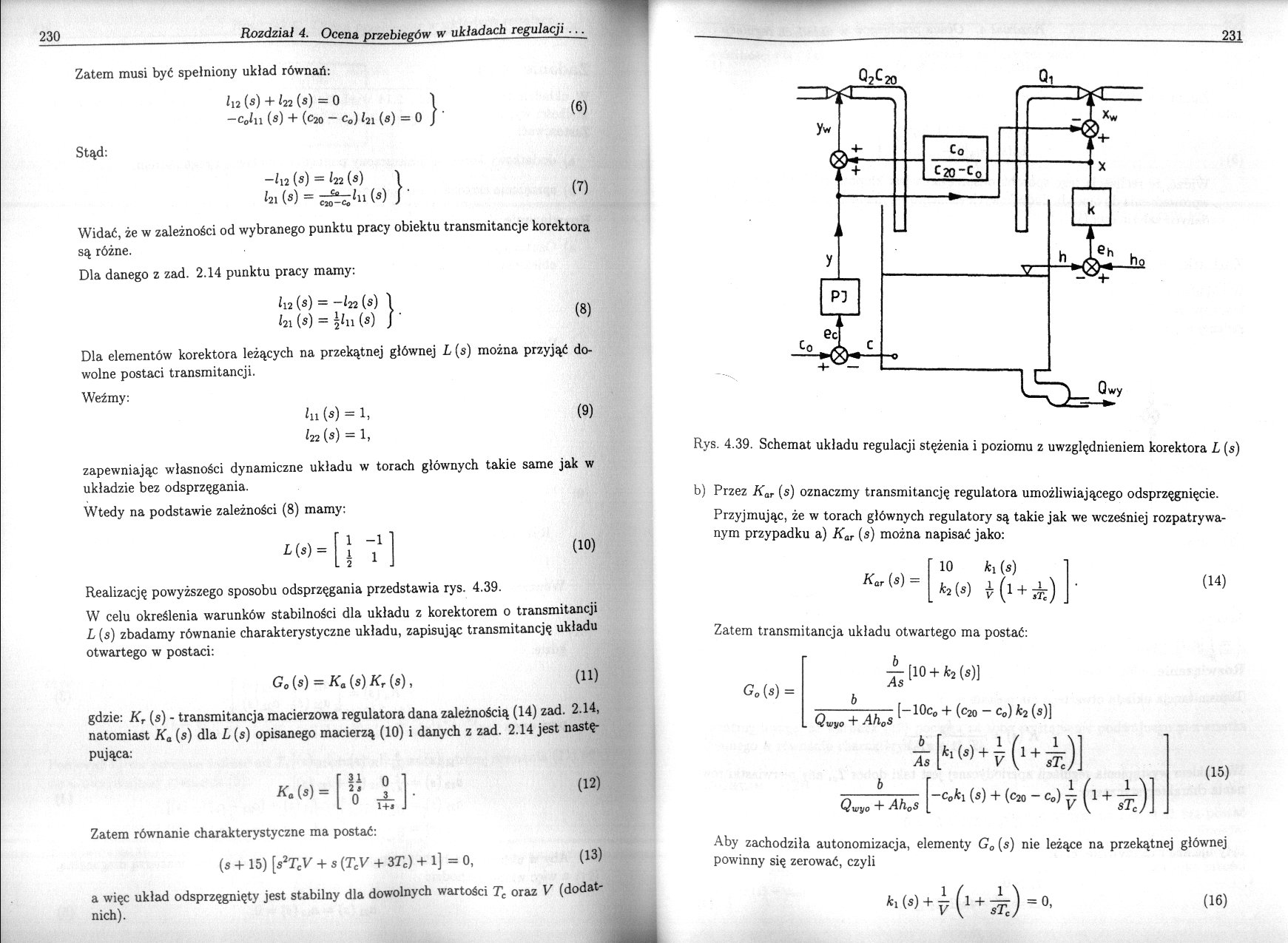
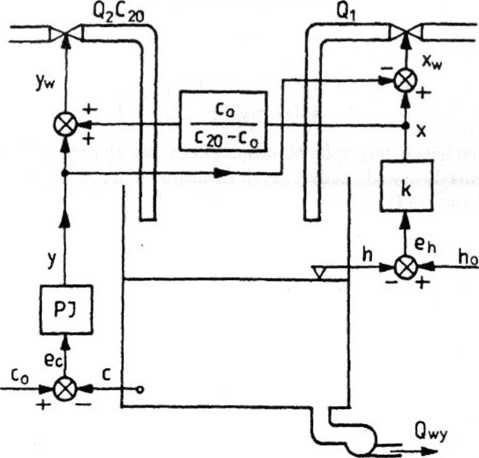
Realizację powyższego sposobu odsprzęgania przedstawia rys. 4.39.
W celu określenia warunków stabilności dla układu z korektorem o transmitancji L (s) zbadamy równanie charakterystyczne układu, zapisując transmitancję układu otwartego w postaci:
(U)
G0(s) = Ka(s)Kr(s),
gdzie: Kr (s) - transmitancja macierzowa regulatora dana zależnością (14) zad. 2.14, natomiast Ka (s) dla L (s) opisanego macierzą (10) i danych z zad. 2.14 jest następująca:
Ka(s) =

0
3
1+* .
(12)
Zatem równanie charakterystyczne ma postać:
(s + 15) [s2TcV + s (TCV + 3Tc) + l] = 0, (13)
a więc układ odsprzęgnięty jest stabilny dla dowolnych wartości Tc oraz V (dodatnich).
Rys. 4.39. Schemat układu regulacji stężenia i poziomu z uwzględnieniem korektora L (s) b) Przez Kar (s) oznaczmy transmitancję regulatora umożliwiającego odsprzęgnięcie.
Przyjmując, że w torach głównych regulatory są takie jak we wcześniej rozpatrywanym przypadku a) Kar (s) można napisać jako:
Kar (s) =
|
' 10 |
ki (s) |
|
M«) |
v (1 + |
(14)
Zatem transmitancja układu otwartego ma postać:
Qwyo A}XqS
_6_
(15)
As
Aby zachodziła autonomizacja, elementy G0 (s) nie leżące na przekątnej głównej powinny się zerować, czyli
(16)
‘■w+Ki+A)'0,
Wyszukiwarka
Podobne podstrony:
221 (26) 220 Rozdział 4. Ocena przebiegów w układach regulacji ... Obecnie można stosować metodę
223 (29) 222 Rozdział, 4. Ocena przebiegów w układach regulacji ■. • Zadanie 4.21 W układzie z zadan
225 (24) 224 Rozdział 4. Ocena przebiegów w układach regulacji.Zadanie 4.22 W podanym na rys. 4.34 u
227 (24) 226 Rozdział 4. Ocena przebiegów w układach regulacji ■ ■ • Uwzględniając związki (4), (5)
229 (24) 228 Rozdział 4. Ocena przebiegów w układach regulacji ... Rys. 4.37. Ilustracja przechodzen
233 (24) 232 Rozdział 4. Oceną przebiegów w układach regulacji... 232 Rozdział 4. Oceną przebiegów w
235 (24) 234 Rozdział 4. Ocena przebiegów w układach regulacji ... Rys. 4.41. Schemat blokowy układu
237 (22) 236 Rozdział 4. Ocena przebiegów w układach regulacji ■ ■ Dla naszego zadania: 236 Rozdział
239 (23) 238 Rozdział 4. Ocena przebiegów w układach regulacji... Rys. 4.44. Schemat blokowy układu
Rozdział 11.4. Sygnały w układachautomatycznej regulacji Przekazywanie informacji pomiędzy elementam
Czas na łamanie gło Układamy krzyżówkę - hasło MUSI być związane z dzisiejszym tematem lekcji
skanuj0019 Obsługa aparatu powinna przebiegać zgodnie instrukcjąproducenta. Pacjent musi być poinfor
DSCN1085 (2) 4.26. Znaleźć wszystkie pary (x, y) liczb całkowitych spełniające układ równań fx
REGULAMIN STUDIÓW V (ocena końcowa x punkty) ocena z przebiegu studiów =-=;-, X punktów przy
SZKOŁA PODSTAWOWA NR 26 IM. RYSZARDA BERWIŃSKIEGO w POZNANIU - układa łańcuch pokarmowy z podanyc
więcej podobnych podstron