223 (29)
222 Rozdział, 4. Ocena przebiegów w układach regulacji ■. •
Zadanie 4.21
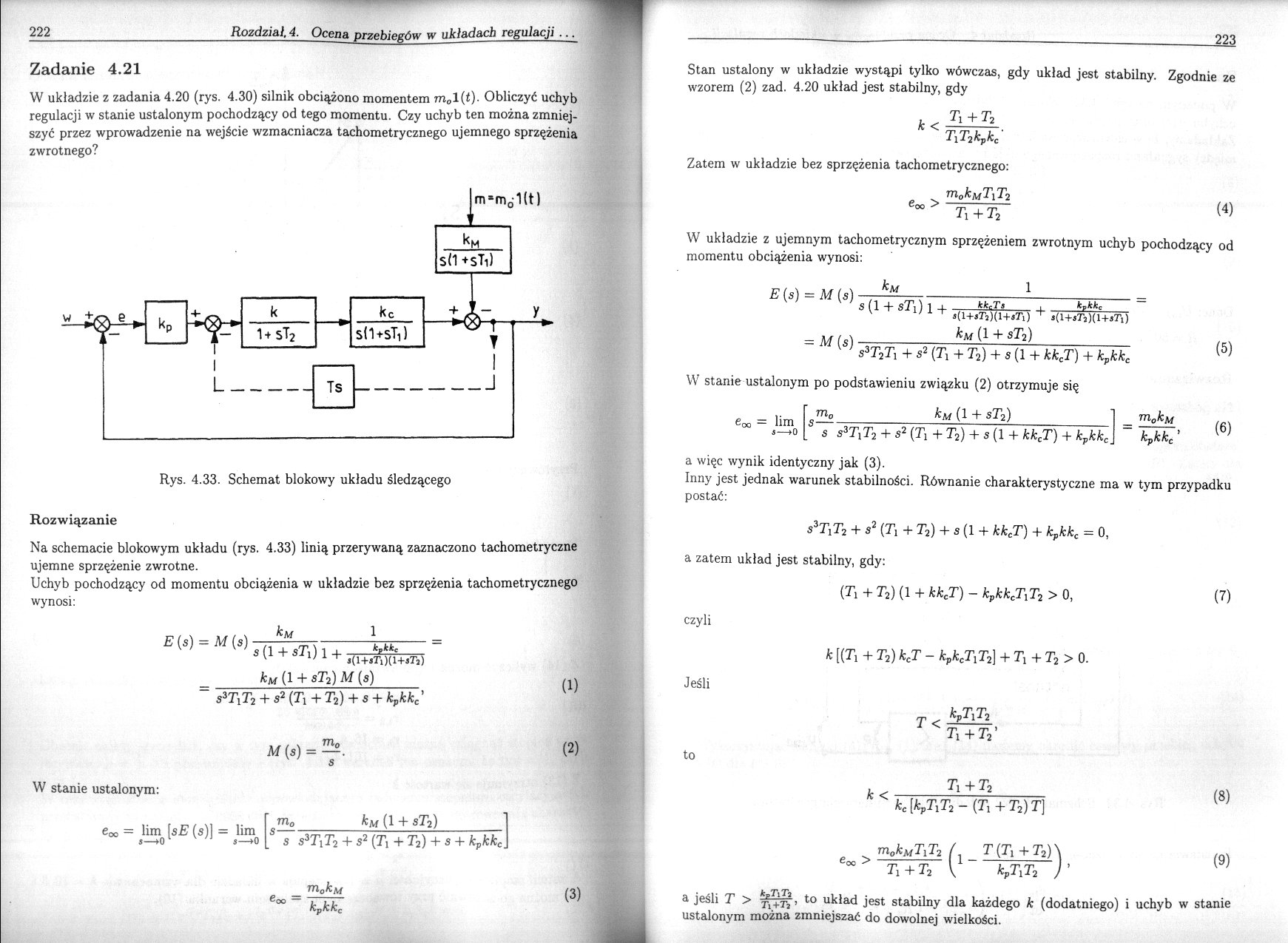
W układzie z zadania 4.20 (rys. 4.30) silnik obciążono momentem m0l{t). Obliczyć uchyb regulacji w stanie ustalonym pochodzący od tego momentu. Czy uchyb ten można zmniejszyć przez wprowadzenie na wejście wzmacniacza tachometrycznego ujemnego sprzężenia zwrotnego?
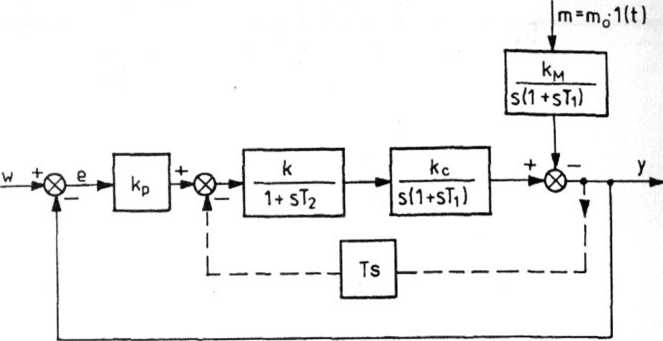
Rys. 4.33. Schemat blokowy układu śledzącego
Rozwiązanie
Na schemacie blokowym układu (rys. 4.33) linią przerywaną zaznaczono tachometryczne ujemne sprzężenie zwrotne.
Uchyb pochodzący od momentu obciążenia w układzie bez sprzężenia tachometrycznego
wynosi:
(1)
kM{l + sT2)M{s) s3T,T2 + s2 (Ti + T2) + s-
M{s) =
m0
W stanie ustalonym:
ex = lim^ [sE (s)] = lim^
m0_kj\ą (1 -t sT2)_
s s3TiT2 + s2 (Ti + T2) + s -f- kpkkc
kpkkc
Stan ustalony w układzie wystąpi tylko wówczas, gdy układ jest stabilny. Zgodnie ze wzorem (2) zad. 4.20 układ jest stabilny, gdy
k <
Ti+T2
T\T2kpkc
Zatem w układzie bez sprzężenia tachometrycznego:
^00 **
W układzie z ujemnym tachometrycznym sprzężeniem zwrotnym uchyb pochodzący od momentu obciążenia wynosi:
E{s) = M(s) = M (s)
w
s (1 4- cT, 1 1 i kkrTs__,__kvkkc
5' + l,1+ s(\+sT2)(i+>t1) + ^i+jTjKi+jT,)
k\i (1 + sT2) _
s3T2Ti 4- s2 (Ti +T2) + s( 1 + kkcT) 4- kpkke W stanie ustalonym po podstawieniu związku (2) otrzymuje się
eoo = lim s—>0
(1 + sT2)
m0kM kpkkc'
a więc wynik identyczny jak (3).
Inny jest jednak warunek stabilności. Równanie charakterystyczne ma w tym przypadku
postać:
s*T\T2 4" s* (Ti 4" Ti) 4- s (1 4- kkcT) 4" kpkkc — 0,
a zatem układ jest stabilny, gdy:
(7)
(Tj 4- T2) (1 4- kkcT) — kpkkcT\T2 > 0,
czyli
k [(Ti 4- T2) kcT — kpkcT\T2\ 4- Ti 4- T2 > 0.
Jeśli
T <
kpTT2 Ti 4- T2’
to
k <
(9)
m0kMTiT2 ( T(Ti+T2)\
600 T,+T2 V1 kpTiT2 )
a jeśli T > , to układ jest stabilny dla każdego k (dodatniego) i uchyb w stanie
ustalonym można zmniejszać do dowolnej wielkości.
Wyszukiwarka
Podobne podstrony:
225 (24) 224 Rozdział 4. Ocena przebiegów w układach regulacji.Zadanie 4.22 W podanym na rys. 4.34 u
221 (26) 220 Rozdział 4. Ocena przebiegów w układach regulacji ... Obecnie można stosować metodę
227 (24) 226 Rozdział 4. Ocena przebiegów w układach regulacji ■ ■ • Uwzględniając związki (4), (5)
229 (24) 228 Rozdział 4. Ocena przebiegów w układach regulacji ... Rys. 4.37. Ilustracja przechodzen
231 (26) 230 Rozdział 4. Ocena przebiegów w układach regulacji ... Zatem musi być spełniony układ ró
233 (24) 232 Rozdział 4. Oceną przebiegów w układach regulacji... 232 Rozdział 4. Oceną przebiegów w
235 (24) 234 Rozdział 4. Ocena przebiegów w układach regulacji ... Rys. 4.41. Schemat blokowy układu
237 (22) 236 Rozdział 4. Ocena przebiegów w układach regulacji ■ ■ Dla naszego zadania: 236 Rozdział
239 (23) 238 Rozdział 4. Ocena przebiegów w układach regulacji... Rys. 4.44. Schemat blokowy układu
222 Rozdział V. Ocena jakości pracy ucznia w zakresie wychowania fizycznego Kurek-Paszczuk A. 2004,
Rozdział 11.4. Sygnały w układachautomatycznej regulacji Przekazywanie informacji pomiędzy elementam
skanuj0387 ROZDZIAŁ JEDENASTY: Przebiegi renderingu i kompozycja 387 Rysunek 11.29. Dwa przebiegi ma
DSC00129 (29) f/t/AWfQ 4. Kształt krzywej przebiegu mierzonego. 5. Ocena o pół/ta
REGULAMIN STUDIÓW V (ocena końcowa x punkty) ocena z przebiegu studiów =-=;-, X punktów przy
222 223 222 ROZDZIM n cnót. To, co jest cnotą ogólną, zawsze będzie też cnotą dziennikarską. O ile j
więcej podobnych podstron