227 (24)
226 Rozdział 4. Ocena przebiegów w układach regulacji ■ ■ •
Uwzględniając związki (4), (5) oraz (1) możemy określić wartość ustaloną uchybu przed wprowadzeniem zaburzenia:
e(0-)=Utad-^MR (16)
Wprowadzając do zależności (13), (14), (15) oraz (16) dane liczbowe otrzymujemy:
(17)
(18)
(19)
iw(<) — [5(l — e_201t) + 4e”201t] l(t) [A], e(O-) =0,4[V],
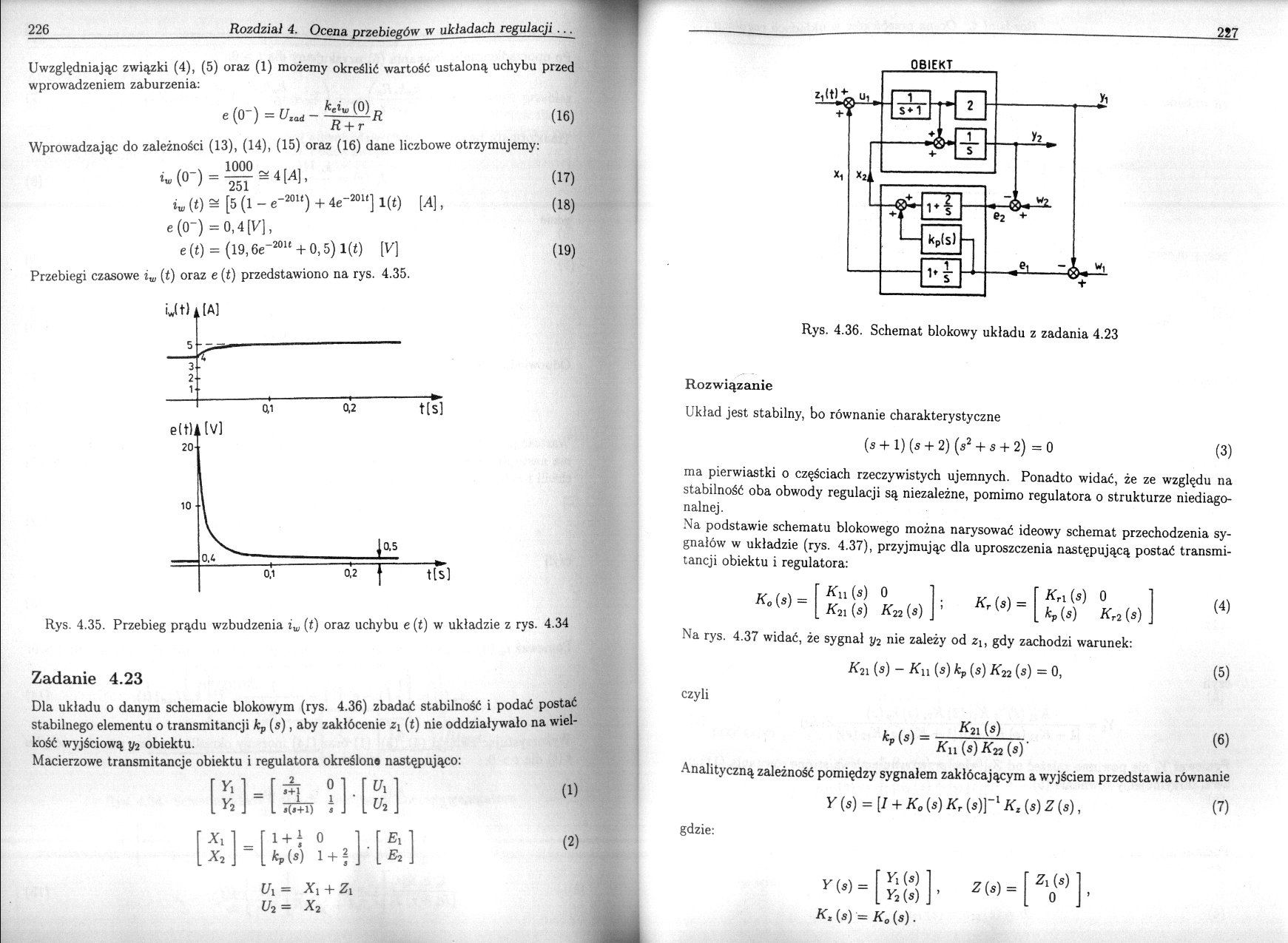
e (t) = (19,6e~201t + 0,5) 1(<) [V]
Przebiegi czasowe iw (t) oraz e (t) przedstawiono na rys. 4.35.

Rys. 4.35. Przebieg prądu wzbudzenia iw (t) oraz uchybu e (t) w układzie z rys. 4.34
Zadanie 4.23
Dla układu o danym schemacie blokowym (rys. 4.36) zbadać stabilność i podać postać stabilnego elementu o transmitancji kp (s), aby zakłócenie zi (t) nie oddziaływało na wielkość wyjściową obiektu.
Macierzowe transmitancje obiektu i regulatora określona następująco:
|
[*> ;i |
' Ui ' | ||
|
. 3(3 + 1) 3 . |
. ^ . |
(1)
‘ Yt
.Y,
|
l + \ 0 |
El ‘ | ||
|
kp (s) 1 + - |
. ^ . |
. X2
t/1= X, + Zi
l/2= x2
r
OBIEKT
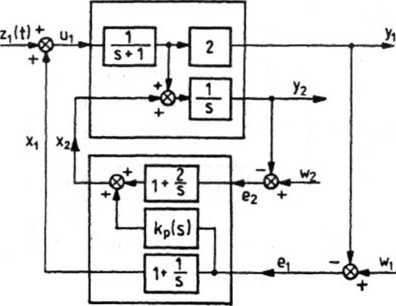
Rys. 4.36. Schemat blokowy układu z zadania 4.23
Rozwiązanie
Układ jest stabilny, bo równanie charakterystyczne
(s + l)(5 + 2)(s2 + s + 2) =0 (3)
ma pierwiastki o częściach rzeczywistych ujemnych. Ponadto widać, że ze względu na stabilność oba obwody regulacji są niezależne, pomimo regulatora o strukturze niediago-nalnej.
Na podstawie schematu blokowego można narysować ideowy schemat przechodzenia sygnałów w układzie (rys. 4.37), przyjmując dla uproszczenia następującą postać transmi-tancji obiektu i regulatora:
Ku (a) 0 K2\ (s) K22 (s)
Krl(a) 0 L kp (s) Kri (s)
Na rys. 4.37 widać, że sygnał y2 nie zależy od Zj, gdy zachodzi warunek:
K0(s) =
Kr(s) =
(5)
(6)
Kn (s)-Kn (s)kp(s)K22(s)=0,
czyli
Y(s) = K,
Z(s) =
Zł W '
o
i
Wyszukiwarka
Podobne podstrony:
225 (24) 224 Rozdział 4. Ocena przebiegów w układach regulacji.Zadanie 4.22 W podanym na rys. 4.34 u
229 (24) 228 Rozdział 4. Ocena przebiegów w układach regulacji ... Rys. 4.37. Ilustracja przechodzen
233 (24) 232 Rozdział 4. Oceną przebiegów w układach regulacji... 232 Rozdział 4. Oceną przebiegów w
235 (24) 234 Rozdział 4. Ocena przebiegów w układach regulacji ... Rys. 4.41. Schemat blokowy układu
221 (26) 220 Rozdział 4. Ocena przebiegów w układach regulacji ... Obecnie można stosować metodę
223 (29) 222 Rozdział, 4. Ocena przebiegów w układach regulacji ■. • Zadanie 4.21 W układzie z zadan
231 (26) 230 Rozdział 4. Ocena przebiegów w układach regulacji ... Zatem musi być spełniony układ ró
237 (22) 236 Rozdział 4. Ocena przebiegów w układach regulacji ■ ■ Dla naszego zadania: 236 Rozdział
239 (23) 238 Rozdział 4. Ocena przebiegów w układach regulacji... Rys. 4.44. Schemat blokowy układu
Rozdział 11.4. Sygnały w układachautomatycznej regulacji Przekazywanie informacji pomiędzy elementam
REGULAMIN STUDIÓW V (ocena końcowa x punkty) ocena z przebiegu studiów =-=;-, X punktów przy
247 (24) 246 Rozdział 5. Układy regulacji impulsowej A zatem dla z > D otrzymujemy: kjk0 D T z-D
226 227 226 ROZDZIAl X w propagandystę. Pięknoduchostwo jest poważną dziennikarską wadą. Francu ska
więcej podobnych podstron