DSCN0435 (Large)
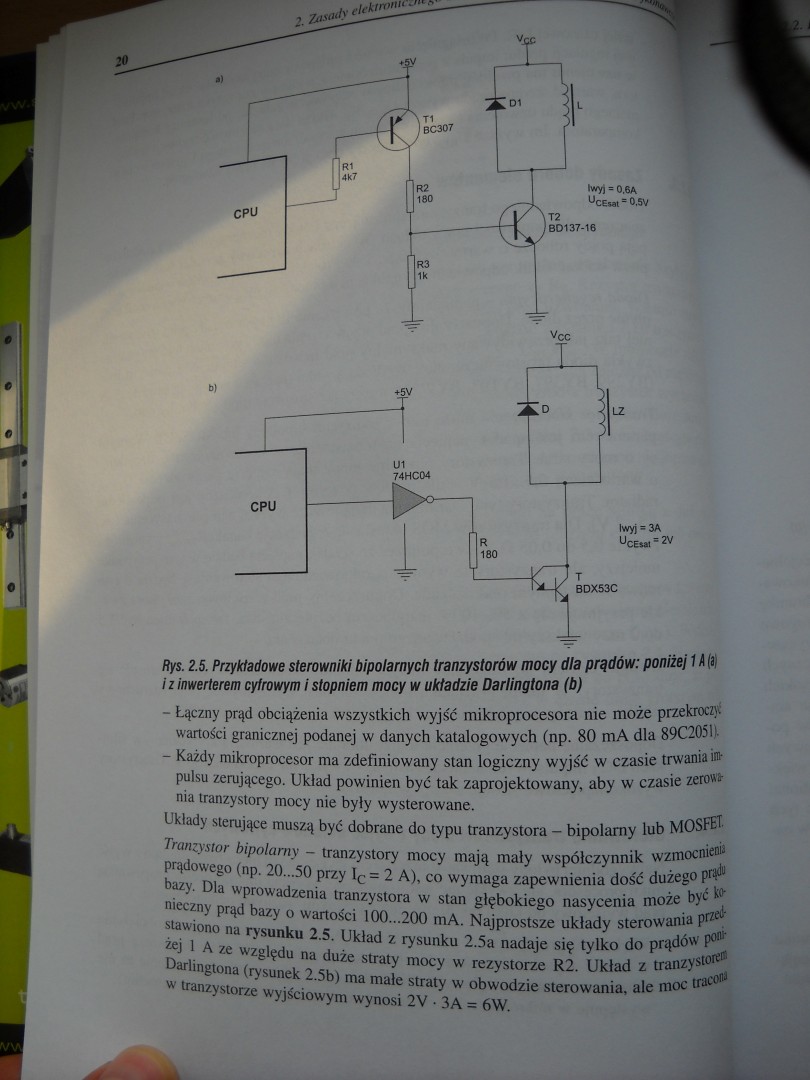

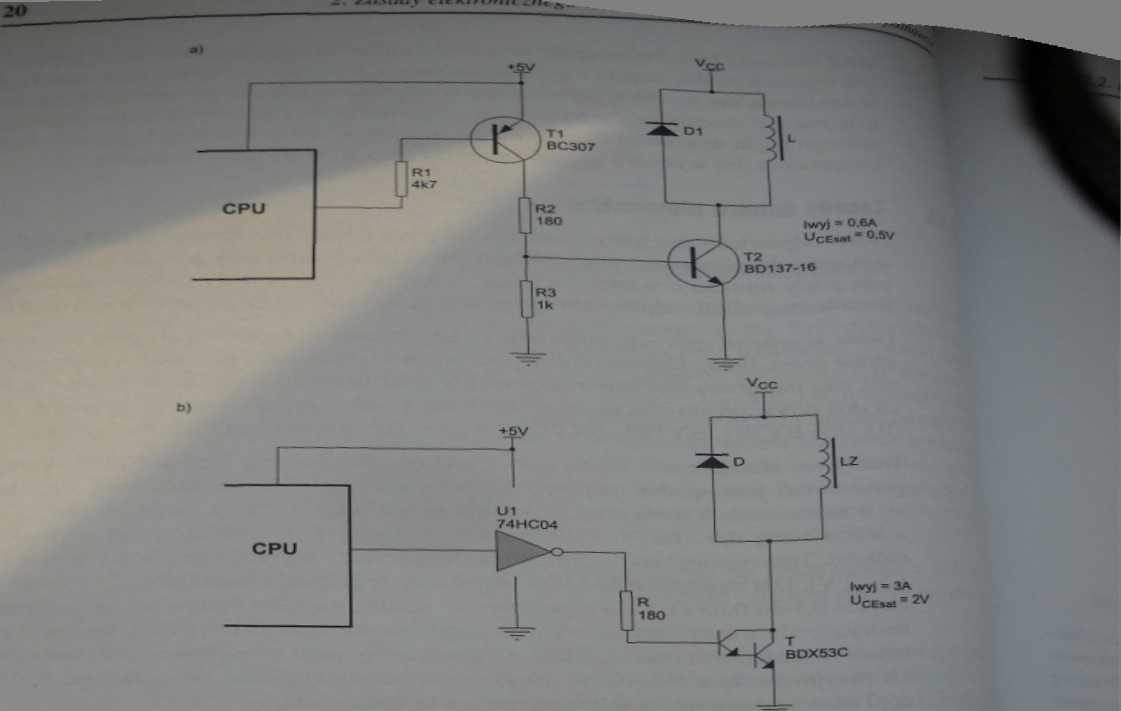

Rys. 2.5. Przykładowe sterowniki bipolarnych tranzystorów mocy dla prądów: poniżej 1A (a) i z inwerterem cyfrowym i stopniem mocy w układzie Darlingtona (b)
— Łączny prąd obciążenia wszystkich wyjść mikroprocesora nie może przekroczyć wartości granicznej podanej w danych katalogowych (np. 80 mA dla 89C205U
— Każdy mikroprocesor ma zdefiniowany stan logiczny wyjść w czasie trwania impulsu zerującego. Układ powinien być tak zaprojektowany, aby w czasie zerom* nia tranzystory mocy nie byty wysterowane.
Układy sterujące muszą być dobrane do typu tranzystora — bipolarny lub MOSFET Tranzystor bipolarny — tranzystory mocy mają mały współczynnik wzmocnienia prądowego (np. 20...50 przy Ic — 2 A), co wymaga zapewnienia dość dużego prądu bazy. Dla wprowadzenia tranzystora w stan głębokiego nasycenia może być konieczny prąd bazy o wartości 100...200 mA. Najprostsze układy sterowania przedstawiono na rysunku 2.5. Układ z rysunku 2.5a nadaje się tylko do prądów poniżej 1 A ze względu na duże straty mocy w rezystorze R2. Układ z tranzystorem Darlingtona (rysunek 2.5b) ma małe straty w obwodzie sterowania, ale moc tracona w tranzystorze wyjściowym wynosi 2V - 3A = 6W.
Wyszukiwarka
Podobne podstrony:
DSCN0430 (Large) Rys. 2.3. Schemat blokowy impulsowego (PWM) sterownika silnika elektrycznego samej
DSCN0432 (Large) Rys. 2.1. Praca klucza tranzystorowego podczas włączania (a) i wyłączania (b) Co dz
DSCN0433 (Large) Rys. 2.3. Schemat blokowy impulsowego (PWM) sterownika silnika elektrycznego samej
1.8 Sterowniki modułowe Rys. 1.8. Przykład sterownika modułowego Elementy sterownika modułowego: •
DSCN0443 (Large) Rys. 4.6. Uproszczone przebiegi prądów w uzwojeniach silników: 2-lazowych (a) i 3-t
DSCN0448 (Large) Rys. 5.2. Przekrój silnika o zmiennej reluktancji Silnik o zmiennej reluktancji (VR
DSCN0460 (Large) 1 1 47 2.3. PRZYKŁADY ZASTOSOWAŃ MODELU rf* MASZYNY UOGÓLNIONEJ (2.9) (2.10) Jeżeli
DSCN0462 (Large) 2J. PRZYKŁADV ZASTOSOWAŃ MODELU d-g MASZYNY UOOÓLNIONEJ 49 oraz o jednym uzwojeniu
403 (11) Tranzystor MIIS- 403 Rys. 6.36 Schemat zastępczy tranzystora MIS dla małych sygnałów dużej
DSCN0437 (Large) 24 2. Zasady elektronicznego sterowania silników. mUrfiś 0.5 do 5 A. Stosuje się w
DSCN0427 (Large) i..*, a ujcuytu*<. irwn/awrun-/ 17 Rys. 2.1. Praca klucza tranzystorowego podcza
DSCN0451 (Large) S.S. Sterowanie silników krokowych 69 A1 Al Rys. 5.6. Możliwe wza
DSCN0463 (Large) 50 2. ELBMBNTY TEORII MASZYNY UOOÓLNIONS
IMG#66 (5) Rys. 9.4. Przykład schematu montażowego połączeń wewnętrznych wnęki sterowniczej pola
DSC00036 (36) Przykładowa pytania na eraminie 1241 Wymień różnica pomiędzy frinryitertm bipolarnym a
Tranzystory bipolarne cha ka • ł Rye.2.1. Przykładowe charakterystyki 8 tytyczne t
Przykład Sterowanie głównym węzłem cieplnym AGH • automatyzacja poboru mocy dla
więcej podobnych podstron