DSCN0453 (Large)
JJ. Sirnm-anie silników- krokowych 71



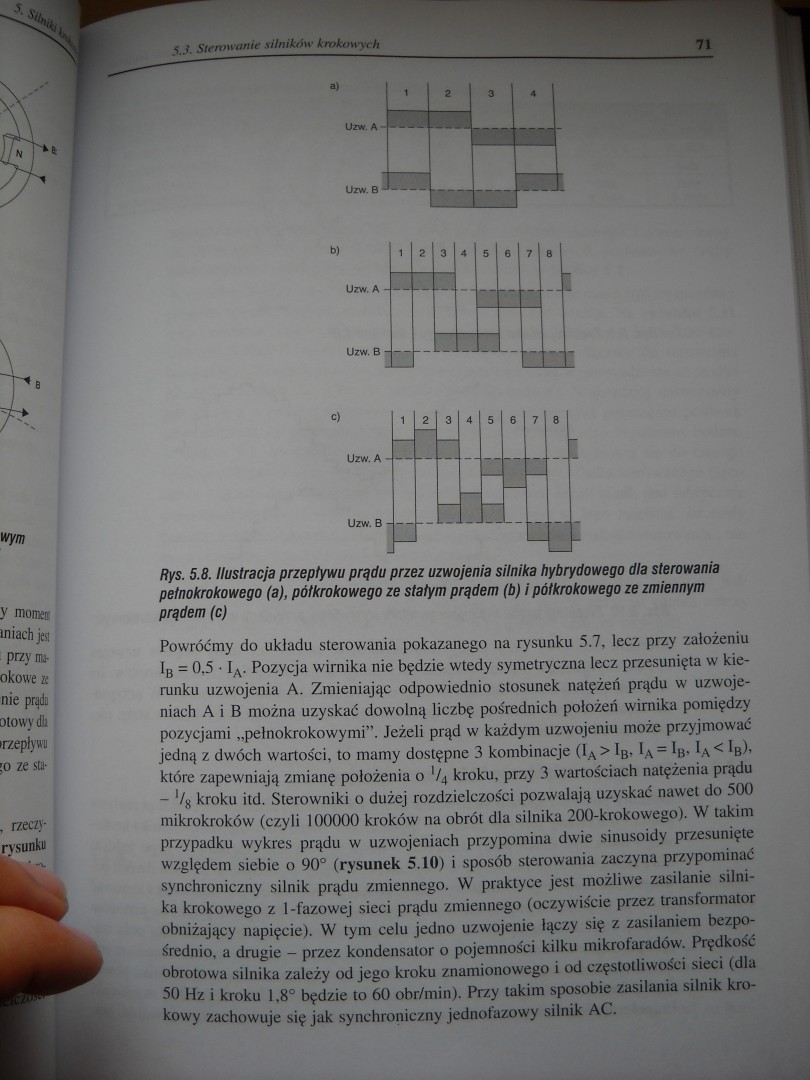
Rys. 5.8. Ilustracja przepływu prądu przez uzwojenia silnika hybrydowego dla sterowania petnokrokowego (a), pólkrokowego ze stałym prądem (b) i pótkrokowego ze zmiennym prądem (c)
Powróćmy do układu sterowania pokazanego na rysunku 5.7, lecz przy założeniu IB10,5 • IA. Pozycja wirnika nie będzie wtedy symetryczna lecz przesunięta w kierunku uzwojenia A. Zmieniając odpowiednio stosunek natężeń prądu w uzwojeniach A i B można uzyskać dowolną liczbę pośrednich położeń wirnika pomiędzy pozycjami „pelnokrokowymi”. Jeżeli prąd w każdym uzwojeniu może przyjmować jedną z dwóch wartości, to mamy dostępne 3 kombinacje (IA > IB, IA = IB, 1A < 1B), które zapewniają zmianę położenia o '/4 kroku, przy 3 wartościach natężenia prądu - Vg kroku itd. Sterowniki o dużej rozdzielczości pozwalają uzyskać nawet do 500 mikrokroków (czyli 100000 kroków na obrót dla silnika 200-krokowego). W takim przypadku wykres prądu w uzwojeniach przypomina dwie sinusoidy przesunięte względem siebie o 90° (rysunek 5.10) i sposób sterowania zaczyna przypominać synchroniczny silnik prądu zmiennego. W praktyce jest możliwe zasilanie silnika krokowego z 1-fazowej sieci prądu zmiennego (oczywiście przez transformator obniżający napięcie). W tym celu jedno uzwojenie łączy się z zasilaniem bezpośrednio, a drugie — przez kondensator o pojemności kilku mikrofaradów. Prędkość obrotowa silnika zależy od jego kroku znamionowego i od częstotliwości sieci (dla 50 Hz i kroku 1,8° będzie to 60 obr/min). Przy takim sposobie zasilania silnik krokowy zachowuje się jak synchroniczny jednofazowy silnik AC.
Wyszukiwarka
Podobne podstrony:
DSCN0447 (Large) fi. 2. PotUiat konstrukcyjny silników krokowych - Napięcie pracy
Sterowanie silnikiem krokowym Przepływ prądu przez cewkę uzwojenia w funkcji czasu
DSCN0446 (Large) Definicja i pojęcia podstawowe Oficjalna definicja silnika krokowego jest następują
DSCN0449 (Large) 67 12. Poddał konstrukcyjny silników krokowychftp. 5.3. Zasada działania silnika z
DSCN0450 (Large) 5.3.Sterowanie silników krokowych Sterowanie pracą silników krokowych jest zadaniem
DSCN0451 (Large) S.S. Sterowanie silników krokowych 69 A1 Al Rys. 5.6. Możliwe wza
DSCN0455 (Large) m 5.1. Cechy różnych sposobów sterowanie silników krokowych ■ Rodni klarowania j
DSCN0473 (Large) Silniki skokowe9.1. Wstęp Silnik skokowy, zwany również krokowym0, jest elektromech
DSCN0430 (Large) Rys. 2.3. Schemat blokowy impulsowego (PWM) sterownika silnika elektrycznego samej
DSCN0433 (Large) Rys. 2.3. Schemat blokowy impulsowego (PWM) sterownika silnika elektrycznego samej
DSCN0437 (Large) 24 2. Zasady elektronicznego sterowania silników. mUrfiś 0.5 do 5 A. Stosuje się w
DSCN0439 (Large) 50 4. Silniki bezszczotkowe z wirującym inagimm Silniki bezszczotkowe z wirującym m
DSCN0441 (Large) 4. 4. Silniki brzszcznlkowr z Rys. 4Z Przekrój silnika z uzwojeniami podzielonymi n
DSCN0442 (Large) 4,1. Wlaicnmfci I zastosowanie silników BLDC 53 momentu obrotowego, lecz nadal nie
DSCN0443 (Large) Rys. 4.6. Uproszczone przebiegi prądów w uzwojeniach silników: 2-lazowych (a) i 3-t
więcej podobnych podstron