31139
2. [Sterowanie ze sprzężeniem od stanu i sprzężeniem wyprzedzającym].
Dany jest system dynamiczny SISO
x{t) = Ax{t)+bu(t)
>(') = Cx(<)
przy czym zmienne stanu w ybrano jako zmienne fazowe.
(a) Zakładając dostępność pomiarowa całego stanu x(t) podać ogólna postać sygnału sterującego za sprzężeniem od błędu śledzenia i sprzężeniem wyprzedząjącyni.
Sprzężenie wyprzedzające zostało zaprojektowane przy pomocy modelu odniesienia:
xA')= Axd(t)+bud(t)
<*(') = *,(')-•*(')
Po podstawieniu do powyższych równali równania stanu otrzymujemy następującą zależność:
e = xd -x = Xj - Ax -bu = xd - Axj + Ae-bu
Ponieważ zastosowano sprzężenie od stanu do otrzymanego równania podstawiamy:
u - Ke + u'
i otrzymujemy:
e - Xj - AXj + Ae- bKe - bu *
H =A-bK e = He - AXj - bu * dokonujemy kolejnych podstawień:
xd = Axj + buj
u 4 =m*
bu =Xj - Axd
Ostatecznie:
u' =bT(xd-Axd)= (bTb) 'bT{xd -Axd)
(b) Zakładajac. że Xd(t) jest zadanym wektorem stanu spełniającym równania stanu i wyjścia oraz x<j<t)*4) wyprowadzić ogólna postać składnika wyprzedzającego
UrKO.
(???)
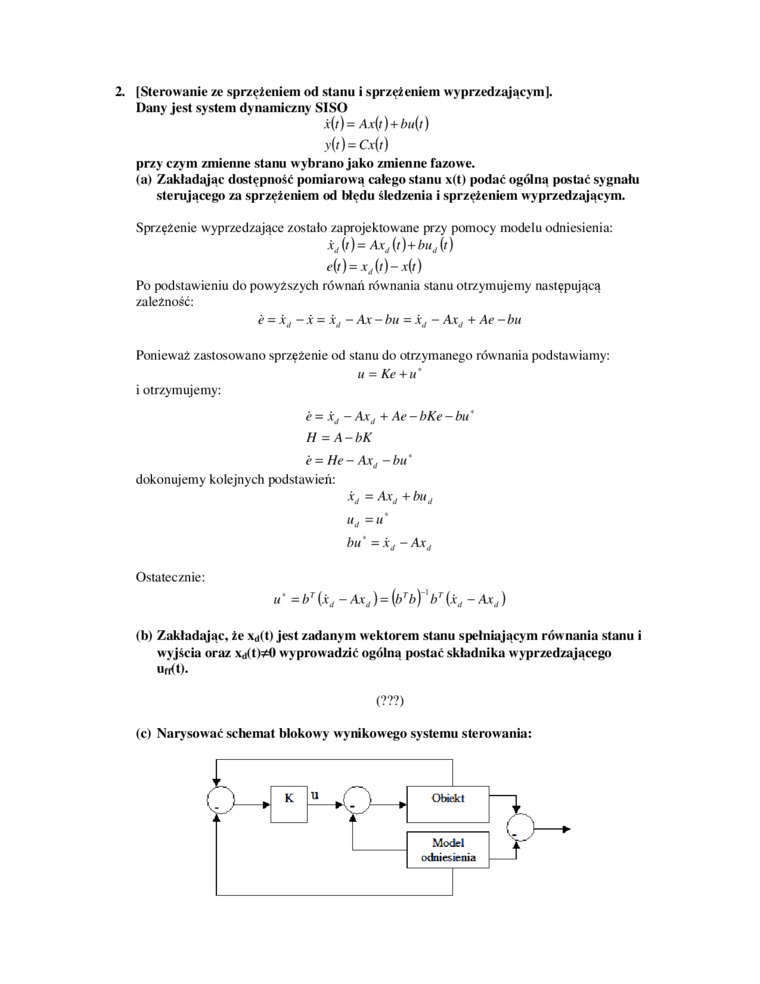
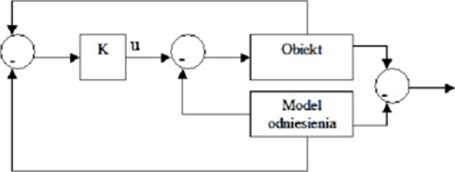
(c) Nary sować schemat blokowy wy nikowego systemu sterowania:
Wyszukiwarka
Podobne podstrony:
1. Dany jest system dynamiczny SISO: V - [2 -1]». (2) (a)
img022 (4) pedagogicznego 1. Antypedagogika zakłada, że dziecko od swych narodzin wie, co jest dla n
Teoria Sterowania - część 1pytania i problemy z metody Hnif pierwiastkowych .1 Dany Jest układ stero
IMGw50 93 ciała zależy od wielu czynników: m.in. od wieku, od stanu emocjonalnego. Obraz ruchowy jes
img022 4 pedagogicznego 1. Antypedagogika zakłada, że dziecko od swych narodzin wie, co jest dla nie
Ekonomia Matematyczna: przykładowe zestawy egzaminacyjne, KrDl Fr, 2012/2013 Zad. 1. Dany jest syste
Pojęcie elementu liniowego Dany jest układ dynamiczny: y(l)=F{u(t)} gdzie: F— operator
21 Sprzężenie od stanu z obserwatorem Luenbergera [1-2007][1-2008] [1-2009_B] Dany jest dynamiczny s
PID Regulacja - sterowanie w układzie zamkniętym, a więc w układzie ze sprzężeniem zwrotnym. Rodzaje
1TeoriaSterowania - Egzamin 1 Sprzężenie od stanu z obserwatorem Luenbergera [1-20
OMiUP t2 Gorski(6 Rys. 7.27. Schemat blokowy urządzenia sterowego o układzie zamkniętym (ze sprzężen
I TERMIN 2 (2) 9) Narysuj układ polaryzacji tranzystora bipolarnego n-p-n ze sprzężeniem emiterowym.
więcej podobnych podstron