1. Sformułuj twierdzenie Bernoulliego o ciągu monotonicznym i ograniczonym i udowodnij.
Definicja twierdzenia Bernoulliego
: Każdy ciąg który jest monotoniczny i ograniczony jest zbieżny. Jego
granicą jest dolny kres zbioru wartości (w przypadku ciągu malejącego lub nierosnącego) albo górny kres zbioru
wartości (w przypadku ciągu rosnącego lub niemalejącego).
Dowód:
(a)Ciąg
rosnący
i
ograniczony
, np. ciąg 𝑎
𝑛
=
𝑛
𝑛+1
(mogą być też inne przykłady: 𝑎
𝑛
= −
1
𝑛
, 𝑎
𝑛
= −2
−𝑛
Najpierw dowód na to że ciąg ten jest rosnący: Badamy znak wyrażenia 𝑎
𝑛+1
− 𝑎
𝑛
:
𝑎
𝑛+1
− 𝑎
𝑛
=
𝑛 + 1
𝑛 + 1 + 1
−
𝑛
𝑛 + 1
=
𝑛 + 2 − 1
𝑛 + 2
−
𝑛 + 1 − 1
𝑛 + 1
= 1 −
1
𝑛 + 2
− 1 −
1
𝑛 + 1
= −
1
𝑛 + 2
+
1
𝑛 + 1
=
=
𝑛 + 2 − (𝑛 + 1)
𝑛 + 1 𝑛 + 2
=
1
𝑛 + 1 𝑛 + 2
Numer wyrazu 𝑛 jest zawsze dodatni (pierwszy wyraz, drugi wyraz, dziesiąty, czy nawet milionowy), więc:
skoro 𝑛 > 0, 𝑡𝑜 𝑛 + 1 > 0 oraz 𝑛 + 2 > 0 oraz skoro 𝑛 > 0 to także
1
𝑛
> 0 i analogicznie
1
𝑛+1
> 0 oraz
1
𝑛+2
> 0 (własności
funkcji hiperbolicznej) tak więc iloczyn dwóch liczb dodatnich
1
𝑛+1 𝑛+2
> 0, więc 𝑎
𝑛+1
− 𝑎
𝑛
> 0. Każdy następny
wyraz jest większy od poprzedniego, więc ciąg jest rosnący.
Teraz dowód na to że ten ciąg jest ograniczony:
Skoro:
1
𝑛
>
1
𝑛+1
>
1
𝑛+2
> ⋯ > 0, to −
1
𝑛
< −
1
𝑛+1
< −
1
𝑛+2
< ⋯ < 0, czyli:
𝑎
𝑛
=
𝑛
𝑛+1
=
𝑛+1−1
𝑛 +1
= 1 −
1
𝑛 +1
< 1 −
1
𝑛+2
< 1 −
1
𝑛+3
< ⋯ < 1 − 0 = 1, więc ciąg jest ograniczony z góryprzez liczbę 1, bo
każdy wyraz tego ciągu, jest mniejszy od 1. Faktycznie: lim
𝑛→∞
𝑎
𝑛
= lim
𝑛 →∞
𝑛
𝑛+1
= lim
𝑛→∞
1 −
1
𝑛+1
=
= lim
𝑛→∞
1 − lim
𝑛→∞
1
𝑛+1
= 1 −
1
∞+1
= 1 − 0 = 1, co jest granicą ciągu i jednocześnie asymptotą poziomą tej funkcji (dla
każdej funkcji monotonicznie rosnącej i ograniczonej granica funkcji w ∞ jest zarazem jej asymptotą poziomą)
(b)Ciąg
malejący
i
ograniczony
, np.𝑏
𝑛
=
1
𝑛
(mogą być też inne przykłady: 𝑏
𝑛
= −
𝑛
𝑛+1
, 𝑏
𝑛
= 2
−𝑛
)
Najpierw dowód na to że ciąg ten jest rosnący: Badamy znak wyrażenia 𝑏
𝑛+1
− 𝑏
𝑛
:
𝑏
𝑛+1
− 𝑏
𝑛
=
1
𝑛 + 1
−
1
𝑛
=
𝑛 − 𝑛 + 1
𝑛 𝑛 + 1
=
−1
𝑛 𝑛 + 1
Numer wyrazu 𝑛 jest zawsze dodatni, więc −𝑛 jest zawsze ujemny, czyli: 𝑛 > 0 → −𝑛 < 0,
−1
𝑛 𝑛 +1
=
−1
𝑛
∙
1
𝑛+1
, więc skoro −𝑛 < 0, 𝑡𝑜 −
1
𝑛
< 0 oraz skoro 𝑛 > 0, 𝑡𝑜 𝑛 + 1 > 0, 𝑤𝑖ę𝑐
1
𝑛+1
> 0, więc
𝑏
𝑛+1
− 𝑏
𝑛
=
−1
𝑛 𝑛 +1
=
−1
𝑛
∙
1
𝑛+1
< 0 (iloczyn liczby zawsze ujemnej −
1
𝑛
przez zawsze dodatnią
1
𝑛+1
daje liczbę zawsze
ujemną). Każdy następny wyraz ciągu jest mniejszy od poprzedniego, wiec ciąg jest malejący.
Teraz dowód na to że ten ciąg jest ograniczony:
Wiadomo że: 𝑏
1
> 𝑏
2
> 𝑏
3
> 𝑏
4
> 𝑏
5
> ⋯, czyli
1
𝑛
>
1
𝑛 +1
>
1
𝑛+2
>
1
𝑛+3
>
1
𝑛+4
> ⋯ a wiemy że ten granica tego ciągu wyraża
się w ten sposób:
1
𝑛
>
1
𝑛+1
>
1
𝑛+2
>
1
𝑛+3
>
1
𝑛+4
> ⋯ >
1
𝑛+∞
=
1
∞
= 0, inaczej:
lim
𝑛→∞
1
𝑛
=
1
∞
= 0
2. Wyjaśnij termin co to jest relacja równoważności i podaj 4 przykłady.
Relacje równoważności
nazywamy relacjędwuargumentową R,𝑹 ⊂ 𝒂, 𝒃 : 𝒂, 𝒃 ∈ 𝑨 , którą jest w zbiorze A:
Zwrotna
:
∀
𝑥∈𝐴
𝑥𝑅𝑥,
Symetryczna
:
∀
𝑥,𝑦∈𝐴
(𝑥𝑅𝑦) → (𝑦𝑅𝑥),
Przechodnia
:
∀
𝑥,𝑦,𝑧∈𝐴
(𝑥𝑅𝑦)˄(𝑦𝑅𝑧) → (𝑥𝑅𝑧),
Przykłady tej relacji
:
W zbiorze wszystkich trójkątów:
podobieństwo trójkątów, przystawanie trójkątów;
W zbiorze prostych:
równoległość (oznaczenie ||);
W każdym zbiorze:
równość elementów (oznaczenie =);
W zbiorze 𝑍 liczb całkowitych:
kongruencja, czyli przystawanie modulo 𝑚 (dla ustalonej liczby 𝑚 > 1 o
dwóch liczbach mówimy, że są równe modulo 𝑚, jest ich różnica jest całkowitą wielokrotnością liczby 𝑚);
W zbiorze 𝑅 liczb rzeczywistych:
równość modulo 2𝜋 (dwie liczby nazywamy równymi modulo 2𝜋, jeśli ich
różnica jest całkowitą wielokrotnością liczby 2𝜋);
Relację równoważności
zapisuje się 𝒔𝒚𝒎𝒃𝒐𝒍𝒆𝒎 ~ (tylda, znak podobieństwa figur, proporcjonalności), lub ≡
(znak identyczności, przystawania figur lub właśnie równoważności)
3. Podaj definicję geometryczną i analityczną iloczynu wektorowego i podaj przykłady.
4. Wyznacz granicę gdzie 𝐥𝐢𝐦
𝒙→𝟎
(𝒔𝒊𝒏𝒄 𝒙).
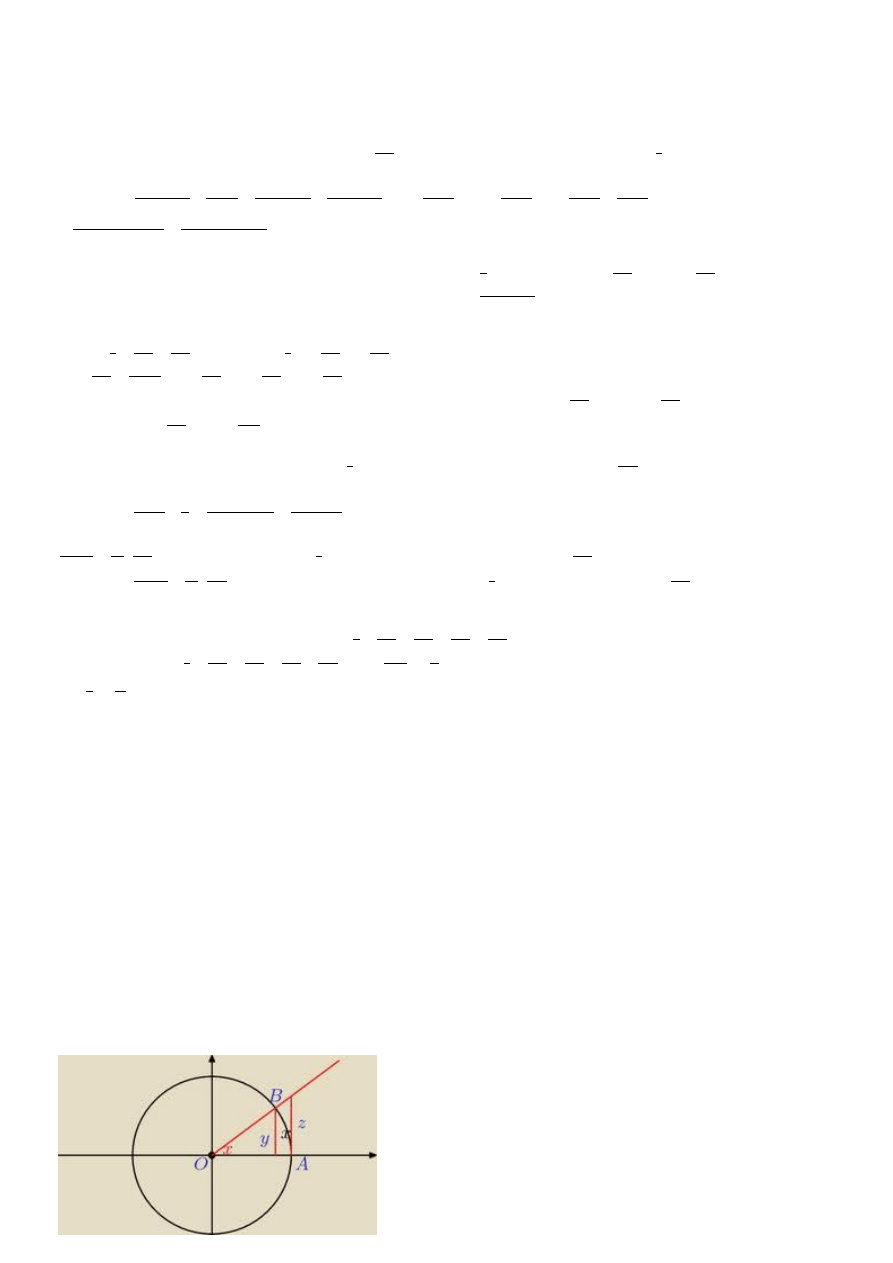
Mamy tzw. okrąg jednostkowy (kąt 𝑥 w radianach, promień
okręgu 𝑟 = 1, więc 𝑂𝐴 = 𝑂𝐵 = 1, w ∆𝑂𝐴𝐵 wysokością jest
odcinek 𝑦, 𝑥 to długość łuku – poniżej pokażę dlaczego wychodzi
to akurat 𝑥, skoro 𝑥 to wartość kąta w radianach, oraz z
odcinkiem 𝑂𝐴 tworzą kąt prosty)
C
Z funkcji trygonometrycznych kąta x:
𝑦
𝑂𝐵
= sin 𝑥, 𝑎 𝑠𝑘𝑜𝑟𝑜 𝑂𝐵 = 1, 𝑤𝑖ę𝑐 𝑦 = sin 𝑥
𝑧
𝑂𝐴
= 𝑡𝑔 𝑥 𝑖 𝑡𝑎𝑘 𝑠𝑎𝑚𝑜 𝑧 = 𝑡𝑔 𝑥
Długość łuku:
𝑥
2𝜋
∙ 2𝜋𝑟 = 𝑥𝑟 = 𝑥 ∙ 1 = 𝑥
Teraz mamy do wyboru 2 sposoby, oba honorowane przez Marleya:
I sposób (ten Marleyowy z wykładów) – porównywanie długości odcinków/łuków:
Jak widzimy na rysunku , zachodzą podane zależności długości boków:
𝑦 < 𝑥 < 𝑧 czyli sin 𝑥 < 𝑥 < 𝑡𝑔 𝑥,
II sposób (mój pomysł, podobny do tego na filmiku z YT):
Porównując pola trójkątów wg wzoru: 𝑆
∆
=
1
2
𝑎
𝑎
, otrzymujemy poniższe wzory i zależności:
𝑆
∆𝑂𝐴𝐵
=
1
2
𝑂𝐴 ∙ 𝑦 =
1
2
sin 𝑥
Pole wycinka koła 𝐴𝐵
:
𝑆 =
𝑥
2𝜋
∙ 𝜋𝑟
2
=
1
2
𝑥𝑟
2
=
1
2
𝑥
𝑆
∆𝑂𝐴𝐶
=
1
2
𝑂𝐴 ∙ 𝑧 =
1
2
𝑡𝑔 𝑥
I zależności pól tych figur: 𝑺
∆𝑶𝑨𝑩
< 𝑆 < 𝑺
∆𝑶𝑨𝑪
, czyli
𝟏
𝟐
𝐬𝐢𝐧 𝒙 <
𝟏
𝟐
𝒙 <
𝟏
𝟐
𝒕𝒈 𝒙, więc 𝐬𝐢𝐧 𝒙 < 𝑥 < 𝑡𝑔 𝑥
Tu się kończy ten drugi sposób, i dalej:
wiemy że 𝑡𝑔 𝑥 =
sin 𝑥
cos 𝑥
, więc:
sin 𝑥 < 𝑥 <
sin 𝑥
cos 𝑥
, dzielimy stronami dany układ nierówności przez sin 𝑥
1 <
𝑥
sin 𝑥
<
1
cos 𝑥
Teraz korzystając z własności: 3 >
1
2
; ale odwracając do góry nogami każdą z tych liczb musimy
zamienićznakinierówności na przeciwne, więc wychodzi
1
3
< 2, co w naszym układzie nierówności przyjmuje
postać:
1 >
sin 𝑥
𝑥
> cos 𝑥
tutaj korzystamy z
twierdzenia o trzech ciągach
, więc:
skoro: 1 >
sin 𝑥
𝑥
> cos 𝑥, to: lim
𝑥→0
1 > lim
𝑥→0
sin 𝑥
𝑥
> lim
𝑥→0
cos 𝑥
1 > lim
𝑥→0
sin 𝑥
𝑥
> cos 0 = 1
1 > lim
𝑥→0
sin 𝑥
𝑥
> 1
na podstawie twierdzenia o trzech ciągach
𝐥𝐢𝐦
𝒙→𝟎
𝐬𝐢𝐧 𝒙
𝒙
=1
5. Uzyskaj równanie prostej która jest stycznia do hiperboli o równaniu
𝒙
𝟐
𝒂
𝟐
−
𝒚
𝟐
𝒃
𝟐
= 𝟏 w punkcie (𝒙
𝟎
, 𝒚
𝟎
)
(niesprawdzone)
Przede wszystkim, jest to równanie hiperboli w postaci kanonicznej, inaczej, jest równanie hiperboli w postaci
uwikłanej (postać jawna to taka z której łatwo otrzymać postać 𝑦 = 𝑓(𝑥), w uwikłanej mamy 𝐹(𝑥, 𝑦)). Skoro do
otrzymania stycznej do funkcji w punkcie (𝑥
0
, 𝑦
0
) trzeba policzyć pochodną funkcji i wstawić do wzoru
𝑦 − 𝑦
0
= 𝑓′(𝑥
0
)(𝑥 − 𝑥
0
)
To do funkcji uwikłanej trzeba policzyć pochodne cząstkowe względem x i względem y (każde osobno) i
podstawiamy do wzoru:
𝐹
𝑥
′
𝑥
0
, 𝑦
0
∙ 𝑥 − 𝑥
0
+ 𝐹
𝑦
′
(𝑥
0
, 𝑦
0
) ∙ (𝑦 − 𝑦
0
) = 0
Więc: 𝐹(𝑥, 𝑦) =
𝑥
2
𝑎
2
−
𝑦
2
𝑏
2
− 1
𝐹
𝑥
′
𝑥, 𝑦 =
2𝑥
𝑎
2
𝐹
𝑦
′
𝑥, 𝑦 = −
2𝑦
𝑏
2
𝑥 − 𝑥
0
∙
2𝑥
0
𝑎
2
+ 𝑦 − 𝑦
0
∙ −
2𝑦
0
𝑏
2
= 0
𝑥 − 𝑥
0
∙
2𝑥
0
𝑎
2
= 𝑦 − 𝑦
0
∙
2𝑦
0
𝑏
2
𝑥 − 𝑥
0
∙
𝑥
0
𝑦
0
∙
𝑏
2
𝑎
2
= 𝑦 − 𝑦
0
𝑦 =
𝑥
0
𝑦
0
∙
𝑏
2
𝑎
2
∙ 𝑥 −
𝑥
0
2
𝑦
0
∙
𝑏
2
𝑎
2
+ 𝑦
0
6. Sformułuj twierdzenie diagonalizacji i je udowodnij.
Diagonalizacja to rozkład macierzy polegający na rozbiciu macierzy kwadratowej 𝐴 ∈ 𝑀
𝑘
(𝐾)na iloczyn macierzy:𝑃, ∆, 𝑃
−1
∈ 𝑀
𝑘
(𝐾)
𝐴 = 𝑃∆𝑃
−1
Gdzie ∆jest macierzą diagonalną, 𝑃, 𝑃
−1
są nazywane macierzami przejścia.
Współczynniki na głównej przekątnej macierzy diagonalnej 𝛥 są równe kolejnym wartościom własnym macierzy A, z kolei
kolumny macierzy P stanowią kolejne wektory własne macierzy A.
𝜒
𝑎
(𝜆)=det(A-𝜆)=(−1)
𝑛
(𝜆
𝑛
+ 𝑐
𝑛−1
𝜆
𝑛−1
+ ⋯ + 𝑐
1
𝜆 + 𝑐
0)
gdzie 𝑐
0
− 𝑑𝑒 𝑡 𝐴 𝑐
1
− 𝑡𝑟 𝐴 =
𝑎
𝑗𝑗
𝑛
𝑗 =1
Macierze kwadratowe, które można przedstawić w postaci diagonalnej, nazywamy diagonalizowalnymi.
7. Przedstaw związek pomiędzy 0xy i 0rθ w układzie ortokartezjańskim i biegunowym oraz wyznacz
jakobian przejścia jednego równania w drugie.
Skoro mowa tu o układzie biegunowym to chodzi o układy dwuwymiarowe (w trzech wymiarach, jego
odpowiednikiem jest układ współrzędnych sferycznych).
Układem współrzędnych kartezjańskich nazywa się układ
współrzędnych, w którym zadane są:
• punkt zwany początkiem układu współrzędnych, którego
wszystkie współrzędne są równe zeru, często oznaczany literą O
lub cyfrą 0
• zestaw n parami prostopadłych osi liczbowych zwanych osiami układu współrzędnych. Dwie pierwsze osie
często oznaczane są jako:
• (pierwsza oś, zwana osią odciętych),
• (druga, zwana osią rzędnych),
Układ współrzędnych biegunowych:
Każdemu punktowi P płaszczyzny przypisujemy jego współrzędne
biegunowe jak następuje:
• promień wodzący punktu P to jego odległość |𝑂𝑃| od bieguna
• amplituda punktu P to wartość kąta skierowanego pomiędzy półprostą𝑂𝑃
OS a wektorem
Dla jednoznaczności przyjmuje się, że 0 ≤ 𝜑 < 2𝜋 wspołrzędne bieguna O są równe.
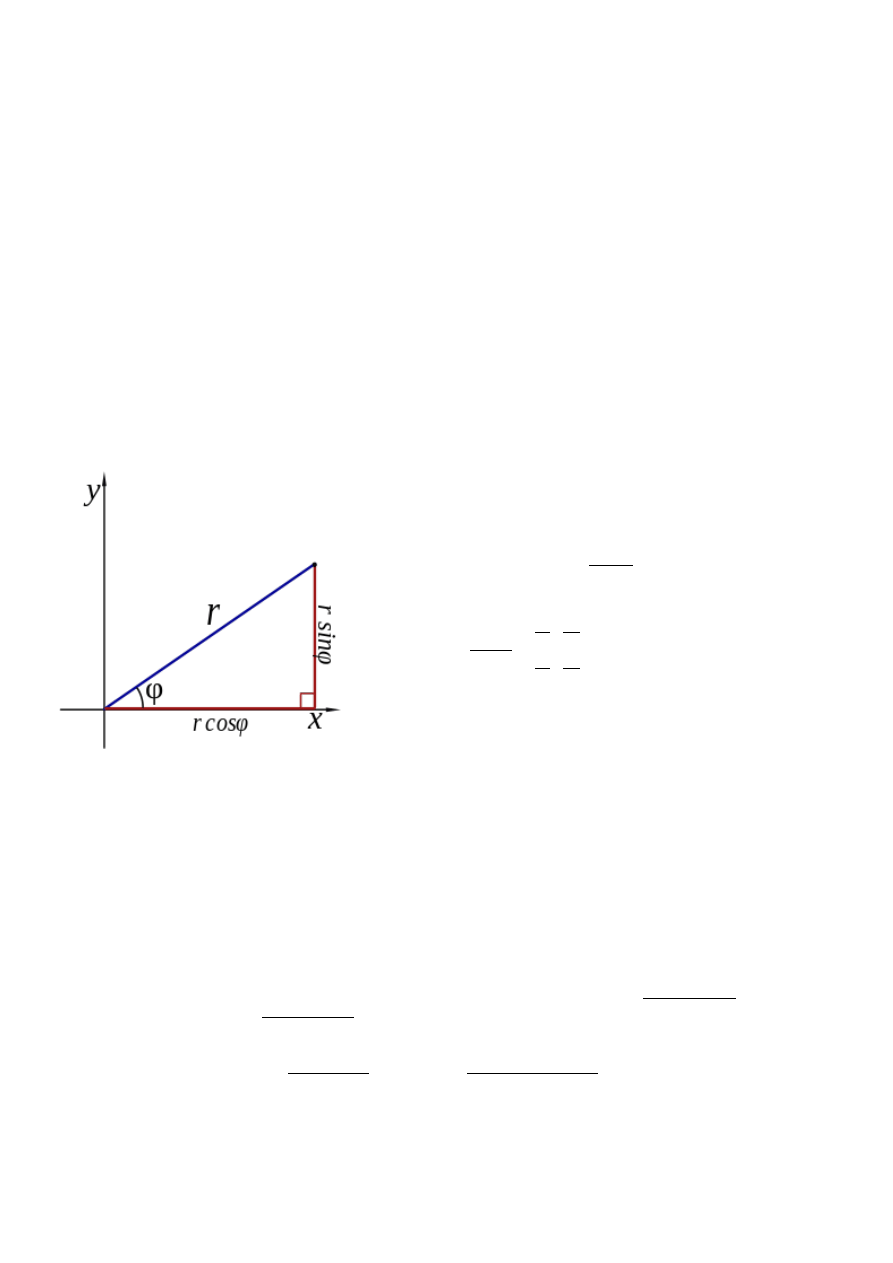
Związki i przejście z jednego układu do drugiego
Przejście z układu biegunowego do ortokartezjańskiego:
𝑟 ≥ 0, 𝜑 ∈< 0,2𝜋)
𝑥 = 𝑟 ∙ cos 𝜑
𝑦 = 𝑟 ∙ sin 𝜑
Przejście z układu ortokartezjańskiego do biegunowego.
𝑟 = 𝑥
2
+ 𝑦
2
Jakobian przejścia do współrzędnych ortokartezjańskich
𝐷 𝑥, 𝑦
𝐷 𝑟, 𝜑
=
𝜕𝑥
𝜕𝑟
𝜕𝑥
𝜕𝜑
𝜕𝑦
𝜕𝑟
𝜕𝑦
𝜕𝜑
=
cos 𝜑
−𝑟 sin 𝜑
sin 𝜑
𝑟 cos 𝜑
=
= 𝑟 ∙ cos 𝜑
2
− −𝑟 sin 𝜑
2
= 𝑟(cos
2
𝜑 + sin
2
𝜑) = 𝑟
8. Podaj definicje geometryczna i analityczna iloczynu skalarnego w przestrzeni 𝑹
𝟐
oraz przedstaw
gdzie ten iloczyn występuje.
Iloczyn skalarny
(inaczej
iloczynwewnętrzny
). Wynikiem takiego iloczynu jest
skalar
– wielkość
niewektorowa, czyli po prostu wartość. Geometrycznie iloczyn skalarny𝒂
∘ 𝒃
wyraża się jako długość rzutu
prostokątnego jednego wektora na drugi. Iloczyn skalarny wektorów 𝒂
i 𝒃
definiuje się jako:
𝒂
∘ 𝒃
= 𝒂 𝒃 𝒄𝒐𝒔(𝜸)
*** gdzie 𝜸jest rozwartością kąta między 𝒂
oraz 𝒃
. Iloczyn skalarny można zapisać jako:
𝒂
∘ 𝒃
= 𝒂
𝟏
𝒃
𝟏
𝒊 + 𝒂
𝟐
𝒃
𝟐
𝒋 + 𝒂
𝟑
𝒃
𝟑
𝒌
ogólnie:𝒂
∘ 𝒃
=
𝒂
𝒊
𝒃
𝒊
𝒏
𝒊=𝟏
𝒕
𝒊
. gdzie 𝑖 , 𝑗 , 𝑘 ,𝑡
𝑖
to wektory jednostkowe wzdłuż osi
odpowiednio OX, OY, OZ i i-tej osi układu współrzędnych n-wymiarowych
Iloczyn wektorowy
(nazywany również
iloczynem zewnętrznym
) ma sens jedynie w trzech wymiarach.
Różni się on od iloczynu skalarnego głównie tym, że wynikiem iloczynu wektorowego dwóch wektorów jest
wektor. Iloczyn wektorowy𝒂
× 𝒃
jest wektorem prostopadłym tak do 𝒂
jak i do 𝒃
i jest zdefiniowany jak
𝒂
× 𝒃
= 𝒂 𝒃 𝐬𝐢𝐧 𝜽 𝒏
***gdzie θ jest rozwartością kąta między 𝒂
oraz 𝒃
, a n jest wektorem jednostkowym prostopadłym jednocześnie
do𝒂
i𝒃
, który uzupełnia układ prawoskrętny. Ograniczenie prawoskrętności jest niezbędne, ponieważ istnieją dwa
wektory jednostkowe, które są równocześnie prostopadłe do𝒂
i 𝒃
, mianowicie 𝒏
oraz -𝒏
.
***Iloczyn wektorowy𝒂
× 𝒃
jest określony tak, by 𝒂
, 𝒃
i 𝒂
× 𝒃
również były układem prawoskrętnym (jednakże
𝒂
oraz 𝒃
nie muszą być koniecznie ortogonalne). Jest to tzw. reguła prawej dłoni. Długość 𝒂
× 𝒃
może być
interpretowana jako pole równoległoboku o bokach a oraz b. Iloczyn wektorowy może być zapisany jako:
𝒂
× 𝒃
= 𝒂
𝟐
𝒃
𝟑
− 𝒂
𝟑
𝒃
𝟐
𝑖 + 𝒂
𝟑
𝒃
𝟏
− 𝒂
𝟏
𝒃
𝟑
𝑗 + 𝒂
𝟏
𝒃
𝟏
− 𝒂
𝟐
𝒃
𝟐
𝑘 =
𝑎
1
𝑏
1
𝑖
𝑎
2
𝑏
2
𝑗
𝑎
3
𝑏
3
𝑘
9. Podaj definicję szeregu liczbowego i jego sumy, zbieżności i zbieżności względnej oraz przykłady.
Szereg
𝑎
𝑛
∞
𝑛=1
nazywamy zbieżnym bezwzględnie, jeżeli zbieżny jest szereg
𝑎
𝑛
∞
𝑛=1
Zwykła: Jeśli wyraz ogólny 𝑎
𝑛
szeregu
𝑎
𝑛
∞
𝑛=1
nie zbiega do 0, symbolicznie lim
𝑛 →∞
𝑎
𝑛
≠ 0
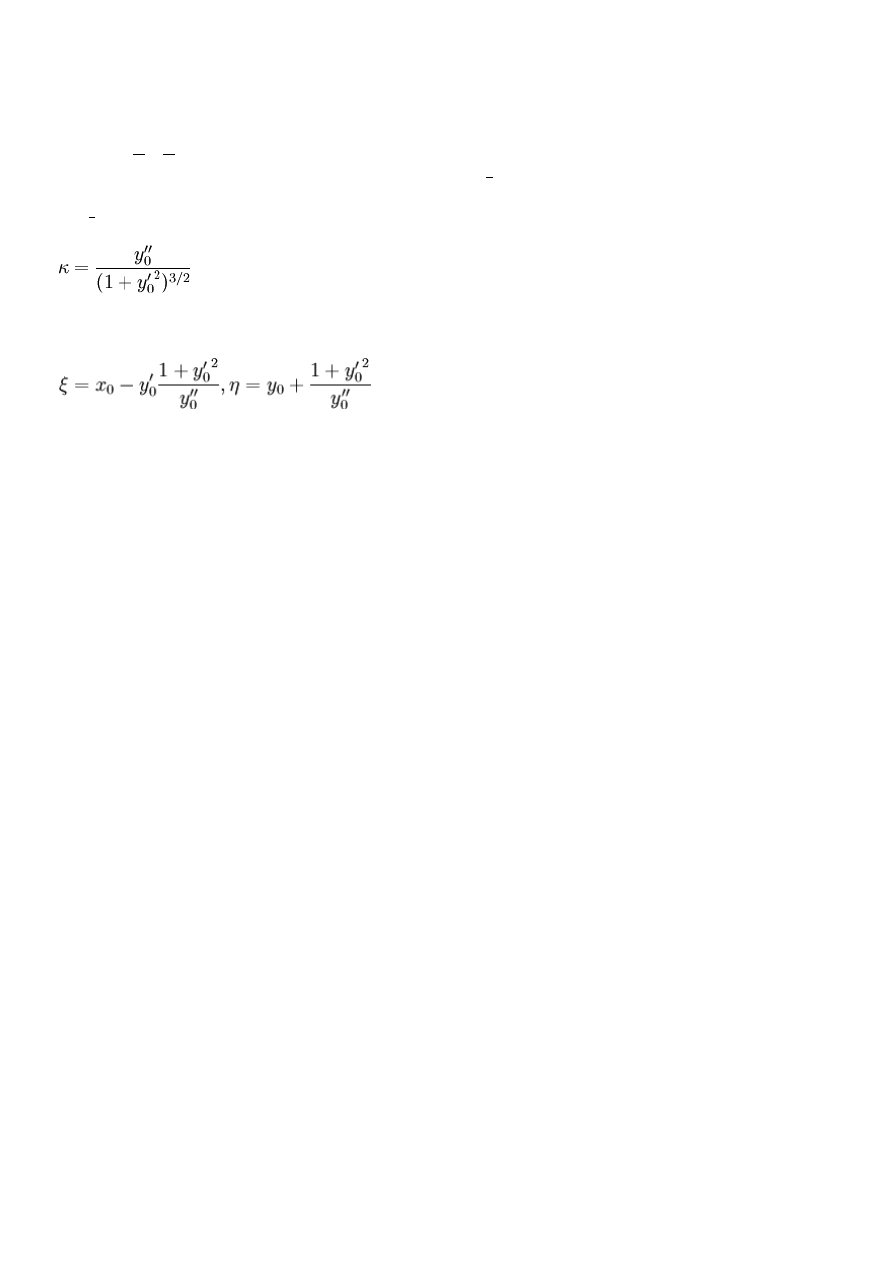
10. Zdefiniuj pojęcie krzywizny krzywej o równaniu 𝒚 = 𝒇(𝒙) i podaj wzór.
Krzywiznę krzywej płaskiej κ
(grecka litera Kappa) definiuje się jako:
𝜅 = 𝑙𝑖𝑚
∆𝑆→0
∆𝜌
∆𝑆
=
𝑑𝜌
𝑑𝑆
, gdzie ∆𝑆 jest długością łuku (i dąży do zera) a ∆𝜌 jest kątem pod jakim przecinają się styczne
do tej krzywej na końcach łuku. Dla okręgu 𝜅 = 𝑐𝑜𝑛𝑠𝑡. 𝑜𝑟𝑎𝑧 𝜅 =
1
𝑅
, 𝑐𝑧𝑦𝑙𝑖, 𝜅 ≥ 0 gdzie R to promień tegoż okręgu.
Każdą krzywą można określić jako sumę łuków okręgów, toteż promień krzywizny w danym punkcie wynosi:
𝛿 =
1
𝜅
. Dla prostej przyjmuje się promień dążący do nieskończoności, co daje krzywiznę równą zero. Dla funkcji
przedstawionej w postaci jawnej:
Koło krzywiznowe (okrąg krzywiznowy)
nazywamy okrąg który przechodząc przez punkt P danej krzywej ma
styczność z krzywą wyższego rzędu niż jakikolwiek inny okrąg przechodzący przez punkt P. Okrąg krzywiznowy
istnieje wyłącznie w tych punktach, w których nie występuje wyprostowanie krzywej (𝜅 ≠ 0). Dla krzywej o
równaniu w postaci jawnej 𝑦 = 𝑓(𝑥), środek takiego okręgu S(ξ,η) ma takie współrzędne:
Wyszukiwarka
Podobne podstrony:
Ćw 1 Budowa i geometria ostrzy skrawających materiały narzędziowe opracowanie nr 2
Recenzje artykułow, matma 1, Opracowanie pozycji literatury:
matma opracowanie
matma opracowanie part3
Matma kolokwium nr.1, Obróbka cieplna i spawalnictwo
METODOLOGIA- opracowanie nr 2, Metodologia
matma opracowanie part 1
matma opracowanie part2
Ćw 1 Budowa i geometria ostrzy skrawających materiały narzędziowe opracowanie nr 2
0316 03 12 2009, opracowanie nr 16 , Układ rozrodczy zenski Paul Esz(1)
0318 07 01 2010, opracowanie nr 18 , Układ nerwowo obwodowy Narządy zmysłów Paul Esz(1)
0317 10 11 2009, opracowanie nr 17 , Układ nerwowy centralny Paul Esz(1)
0306 opracowanie nr 6 , Tkanka nerwowa Paul Esz(1)
0304 opracowanie nr 4 , Szpik kostny i wytwarzanie komórek krwi Paul Esz(1)
0313 12 11 2009, opracowanie nr 13 , Układ dokrewny czesc II Paul Esz(1)
0311 29 10 2009, opracowanie nr 11 , Układ oddechowy Paul Esz(1)
więcej podobnych podstron