
- 1 -
11. CHARAKTERYSTYKI CZASOWE UKŁADÓW SLS
11.1. WPROWADZENIE
A) SPLOT FUNKCJI
Niech dane będą dwie funkcje f
1
(t) i f
2
(t) całkowalne w każdym prze-
dziale (t
1
,t
2
), 0
≤t
1
≤t
2
<∞, wówczas splotem tych funkcji nazywać będziemy
funkcję q(t) określoną dla t
≥0 w sposób następujący
( )
( )
( ) (
)
τ
τ
τ
d
t
f
f
t
f
t
f
t
q
t
∫
−
=
=
0
2
1
2
1
*
)
(
(11.1)
Operację tworzenia splotu nazywamy splataniem funkcji f
1
(t) i f
2
(t) lub
ich mnożeniem splotowym.
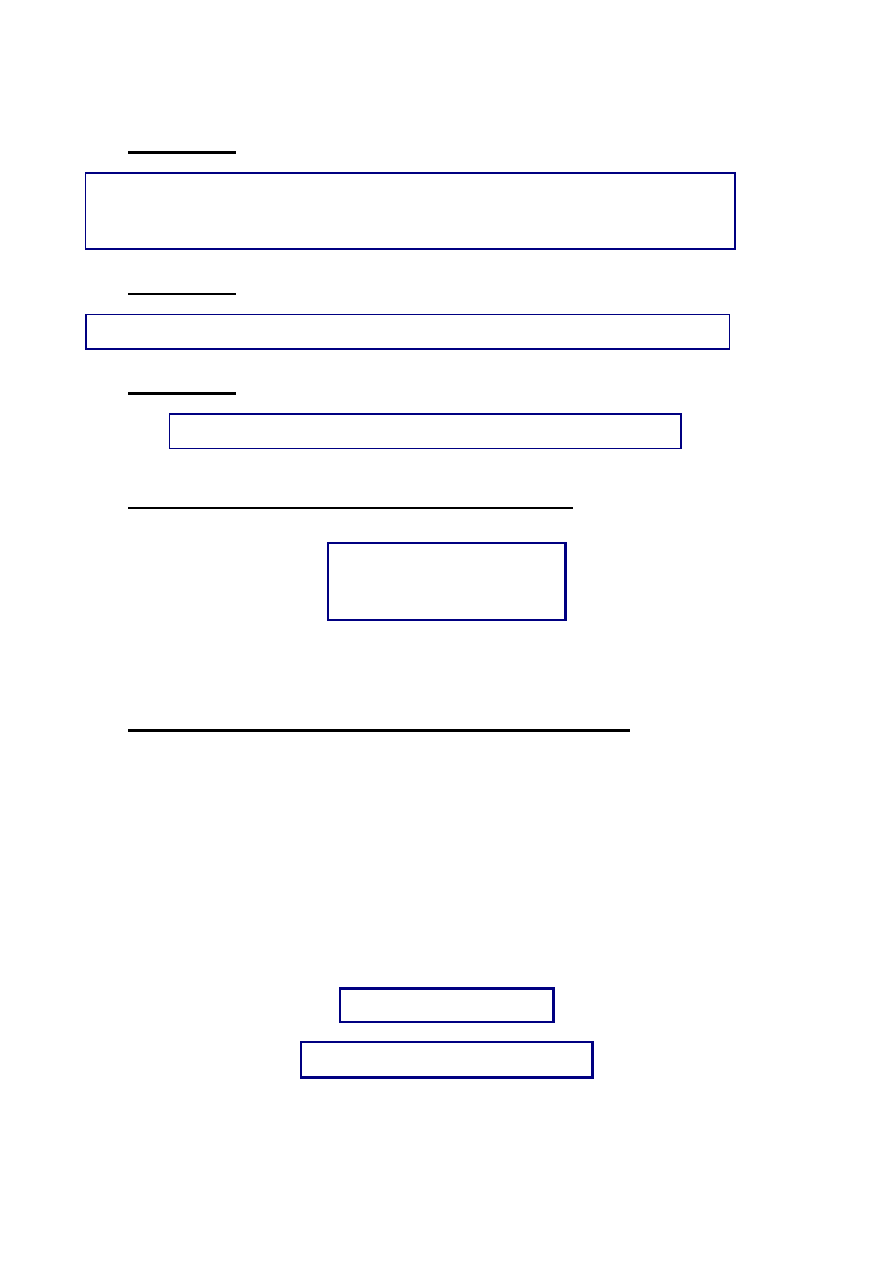
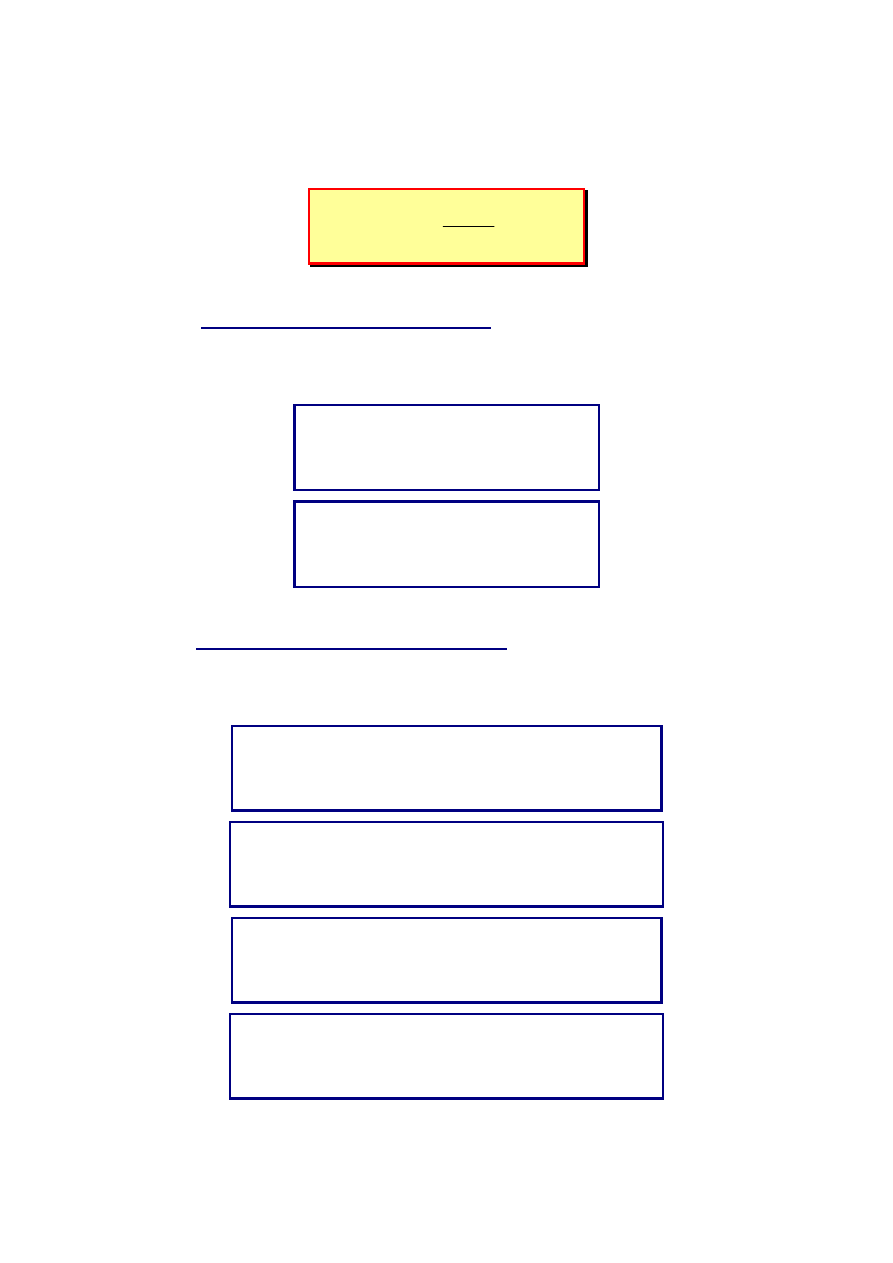
Interpretacja graficzna splotu
Rozpatrzmy funkcje f
1
(t) i f
2
(t)
- w pierwszym etapie wykreśla-
my funkcje f
1
(
τ) i f
2
(
τ) przyjmu-
jąc
τ za zmienną całkowania
1
2
1
f (t)
1
t
1
2
1
f (t)
2
3
4
f ( )
1
τ
f ( )
2
τ
τ
t
τ
W etapie drugim tworzymy
lustrzane odbicie f
2
(-
τ) funkcji
f
2
(
τ)
1
2
1
f ( )
1
τ
τ
f (- )
2
τ
-1
-2
-3
-4
1
2
1
f ( )
1
τ
τ
f (t - )
2 1
τ
-1
-2
t
1
Następnie przesuwamy funk-
cję f
2
(-
τ) wzdłuż osi τ o pewną
wartość, przyjmijmy t
1
– w efek-
cie uzyskujemy funkcję f
2
(t
1
-
τ).
Całkujemy iloczyn funkcji
f
1
(
τ)⋅f
2
(t
1
-
τ) ze względu na τ - jest
to pole pod krzywą wypadkową
funkcji f
1
(
τ) i f
2
(t
1
-
τ). Wartość
splotu f
1
(t)
∗f
2
(t) w chwili t=t
1
jest
równa temu polu powierzchni.
1
2
1
f (t)*f (t)
1
2
t
3
4
t
1
5
6
1,5
- 2 -
Własności splotu:
własność 1 - splatanie funkcji jest przemienne:
( )
( )
( )
( )
( ) (
)
(
) ( )
τ
τ
τ
τ
τ
τ
d
f
t
f
d
t
f
f
t
f
*
t
f
t
f
*
t
f
t
0
2
1
t
0
2
1
1
2
2
1
∫
∫
−
=
−
=
=
(11.2)
własność 2 - splatanie funkcji jest łączne:
( )
( )
( )
( )
( )
( )
[
]
( )
( )
[
]
( )
t
f
*
t
f
*
t
f
t
f
*
t
f
*
t
f
t
f
*
t
f
*
t
f
3
2
1
3
2
1
3
2
1
=
=
(11.3)
własność 3 - splatanie funkcji jest rozdzielne względem dodawania:
( )
( )
[
]
( )
( )
( )
( )
( )
t
f
*
t
f
t
f
*
t
f
t
f
*
t
f
t
f
3
2
3
1
3
2
1
+
=
+
(11.4)
splot funkcji f(t) z funkcją jednostkową 1(t)
( )
( )
τ
τ
d
f
1
*
t
f
t
0
∫
=
(11.5)
Zatem mnożenie splotowe funkcji f(t) przez funkcję jednostkową 1(t) jest równoznacz-
ne z całkowaniem funkcji f(t) w przedziale (0,t)
splot funkcji f(t) z funkcją impulsową Diraca
δ(t)
Na podstawie definicji
( ) ( ) ( ) ( )
( ) (
)
τ
τ
τ
δ
δ
δ
d
t
f
t
f
*
t
t
*
t
f
∫
∞
∞
−
−
=
=
Ponieważ
δ(t) istnieje tylko przy τ=0 - co oznacza, że należy brać pod uwagę wartość
funkcji f(t-
τ) tylko w punkcie τ=0, a więc f(t-τ) może być zastąpiona przez f(t). Za-
tem
( ) ( )
( ) ( )
( ) ( )
( )
1
t
f
d
t
f
d
t
f
t
*
t
f
⋅
=
=
=
∫
∫
∞
∞
−
∞
∞
−
τ
τ
δ
τ
τ
δ
δ
stąd
( ) ( )
( )
t
f
t
*
t
f
=
δ
(11.6a)
Ponadto
( ) (
)
(
)
0
0
t
t
f
t
t
*
t
f
−
=
−
δ
(11.6b)
- 3 -
B) TWIERDZENIE BORELA O SPLOCIE
Jedną z najważniejszych właściwości przekształcenia Laplace’a jest
twierdzenie o splocie tzw. twierdzenie Borela:
( )
( )
[
]
( ) ( )
s
F
s
F
t
f
t
f
2
1
2
1
*
⋅
=
L
(11.7a)
lub
( ) ( )
[
]
( )
( )
t
f
t
f
s
F
s
F
2
1
2
1
1
*
=
⋅
−
L
(11.7b)
gdzie:
( )
( )
[
]
( )
( )
[
]
t
f
s
F
,
t
f
s
F
2
2
1
1
L
L
=
=
C) TWIERDZENIE O TRANSFORMACIE POCHODNEJ SPLOTU
Transformata Laplace’a pochodnej splotu
( )
( )
[
]
( ) ( )
s
F
s
F
s
t
f
*
t
f
t
d
d
2
1
2
1
=
⎥
⎦
⎤
⎢
⎣
⎡
L
(11.8a)
czyli
( ) ( )
[
]
( )
( )
[
]
t
f
*
t
f
t
d
d
s
F
s
F
s
2
1
2
1
1
=
−
L
(11.8b)
- 4 -
D) CAŁKA DUHAMELA
( )
( )
[
]
( ) (
)
τ
τ
τ
d
t
f
f
t
d
d
t
f
t
f
t
d
d
t
∫
−
=
0
2
1
2
1
*
(11.9)
wyrażenie to nazywamy całką Duhamela (całką superpozycji)
Zgodnie z twierdzeniem o różniczkowaniu całki względem parametru
(jeśli obie funkcje f
1
(t) i f
2
(t) mają ciągłe pochodne dla t>0) napiszemy
( )
( )
[
]
=
t
f
t
f
t
d
d
2
1
*
( ) (
)
( )
( )
( ) (
)
τ
τ
τ
τ
τ
τ
d
t
f
f
f
t
f
d
t
f
f
t
d
d
t
t
∫
∫
−
+
=
−
=
+
0
'
2
1
2
1
0
2
1
0
(11.10a)
(
) ( )
( )
( )
(
) ( )
τ
τ
τ
τ
τ
τ
d
f
t
f
t
f
f
d
f
t
f
t
d
d
t
t
∫
∫
−
+
=
−
=
+
0
2
'
1
2
1
0
2
1
0
(11.10b)
a korzystając z przemienności splotu otrzymamy pozostałe postacie całki
Duhamela
( )
( )
[
]
( )
( )
(
) ( )
τ
τ
τ
d
f
t
f
0
f
t
f
t
f
*
t
f
t
d
d
t
0
'
2
1
2
1
2
1
∫
−
+
=
+
(11.10c)
( )
( )
[
]
( )
( )
( ) (
)
τ
τ
τ
d
t
f
f
t
f
0
f
t
f
*
t
f
t
d
d
t
0
2
'
1
2
1
2
1
∫
−
+
=
+
(11.10d)
- 5 -
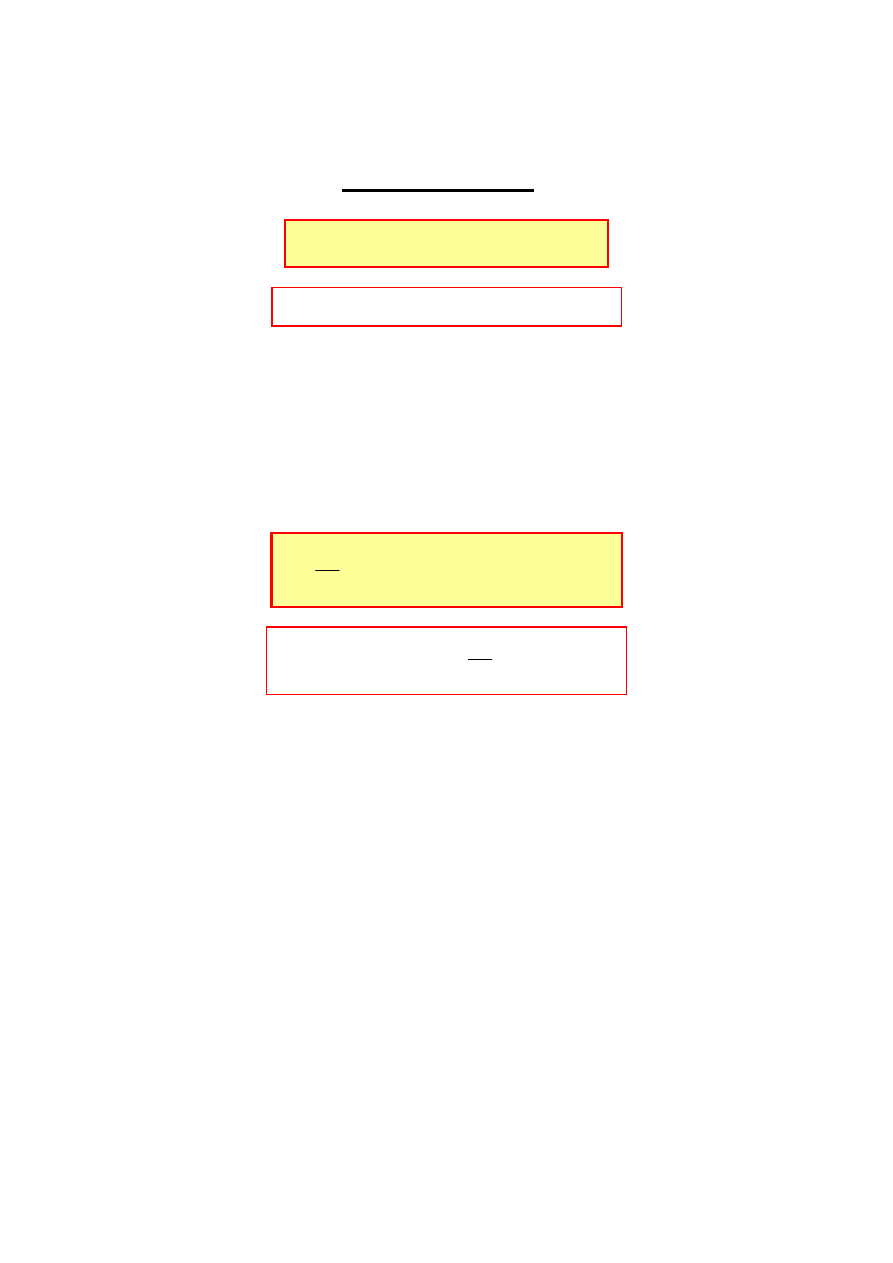
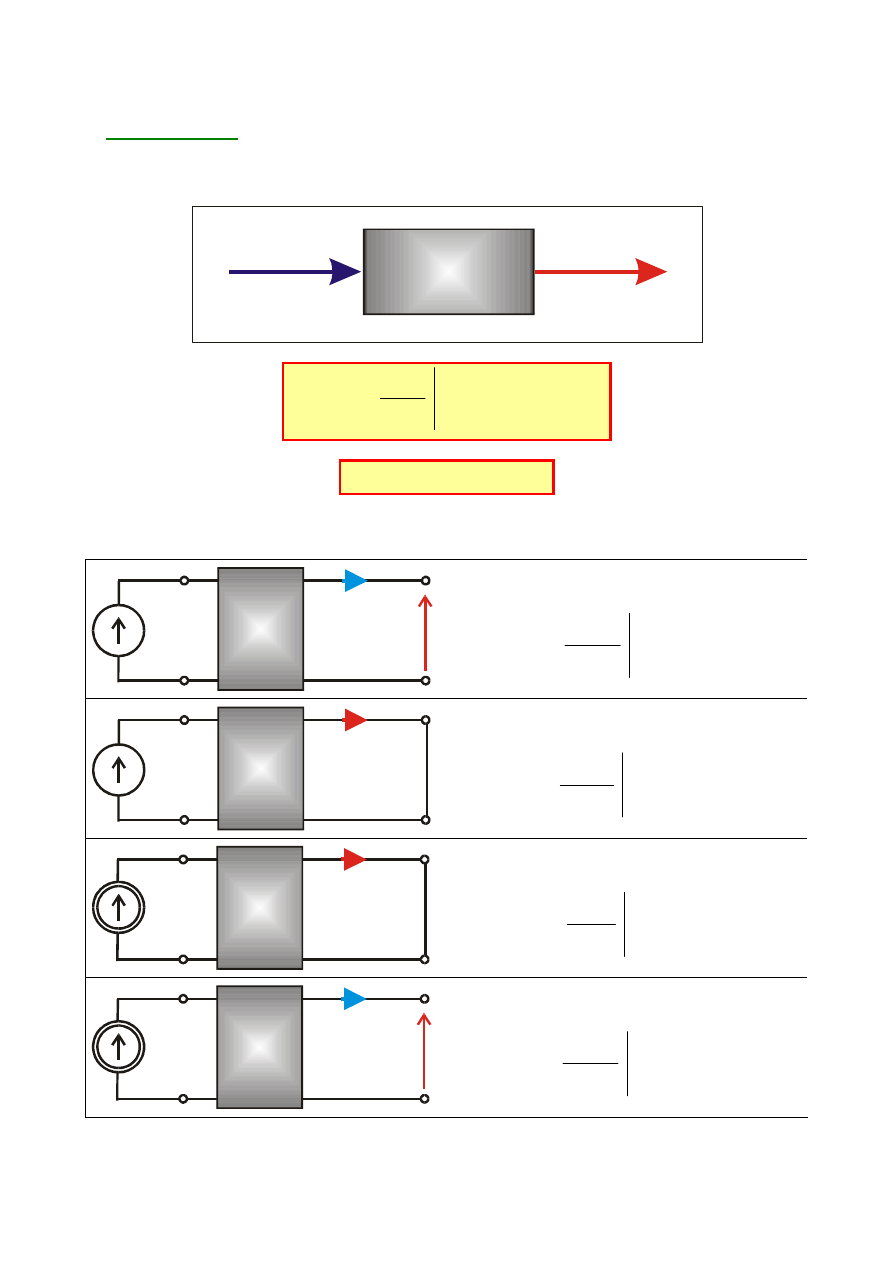
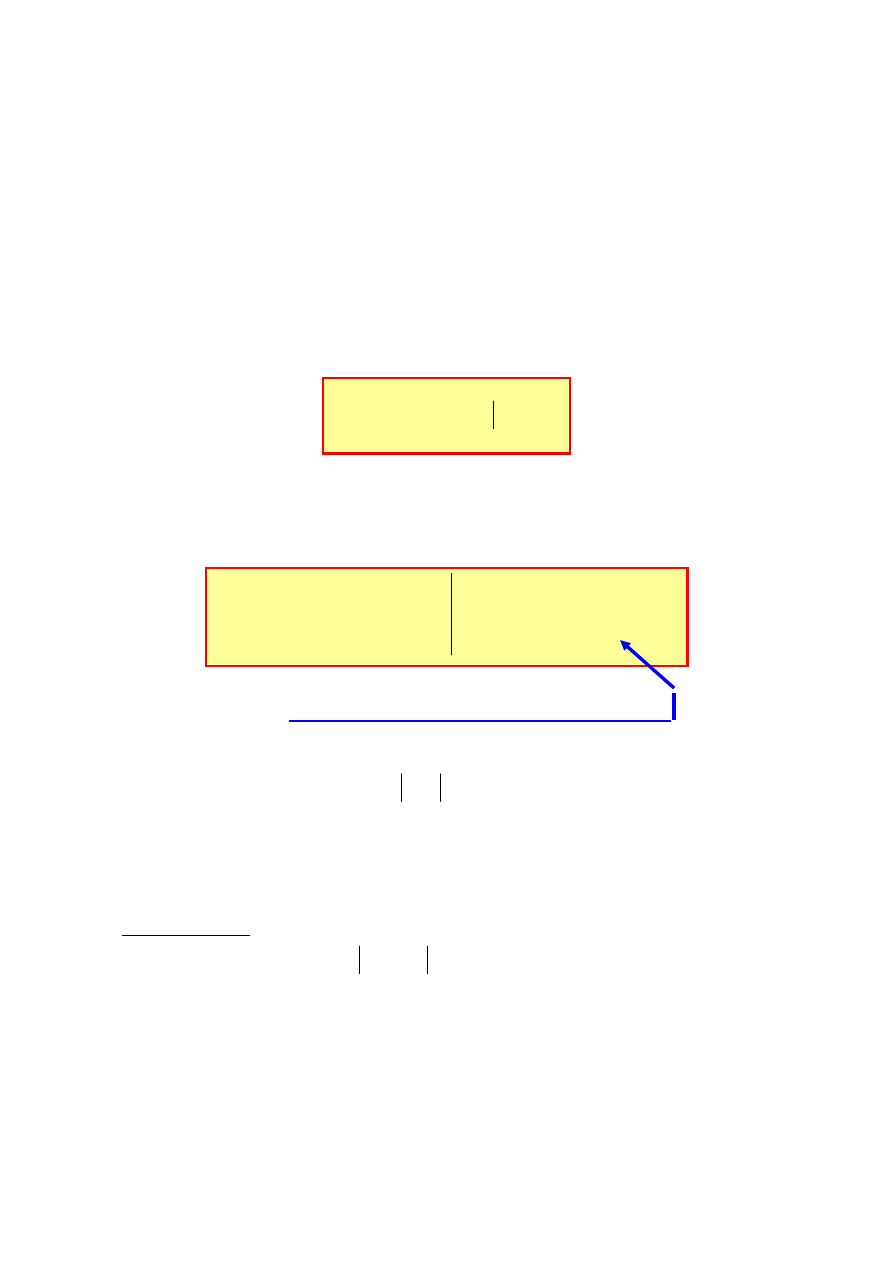
11.2. OPERATOROWE FUNKCJE UKŁADU
Rozpatrzmy układ elektryczny, na który działa wymuszenie przyczy-
nowe f(t) (napięciowe lub prądowe) i dla którego poszukiwaną funkcją jest
odpowiedź r(t) (prądowa lub napięciowa).
f t
( )
r t
( )
układ
SLS
Jeśli wielkości f(t) i r(t) występują na tych samych zaciskach to rozpa-
trywany układ staje się
dwójnikiem
. Jego stan opisany jest parą funkcji:
prądu wejściowego i napięcia
I (s)
Z
i (t)=f(t)
Z
U(s)
u(t)=r(t)
Z(s)
a)
b)
u (t)=f(t)
0
U (s)
0
I(s)
i(t)=r(t)
Y(s)
W zależności od wymuszenia odpowiedź wyznaczamy ze wzoru
( )
( ) ( )
s
I
s
Z
s
U
Z
=
(11.11a)
( ) ( ) ( )
s
U
s
Y
s
I
0
=
(11.11b)
gdzie:
Z(s) – operatorowa IMpedancja
Y(s) – operatorowa adMITANCJA
Dla obu tych funkcji układu spełniających związek
( ) ( )
1
s
Z
s
Y
=
(11.12)
stosujemy określenie :
operatorowa IMMITANCJA
- 6 -
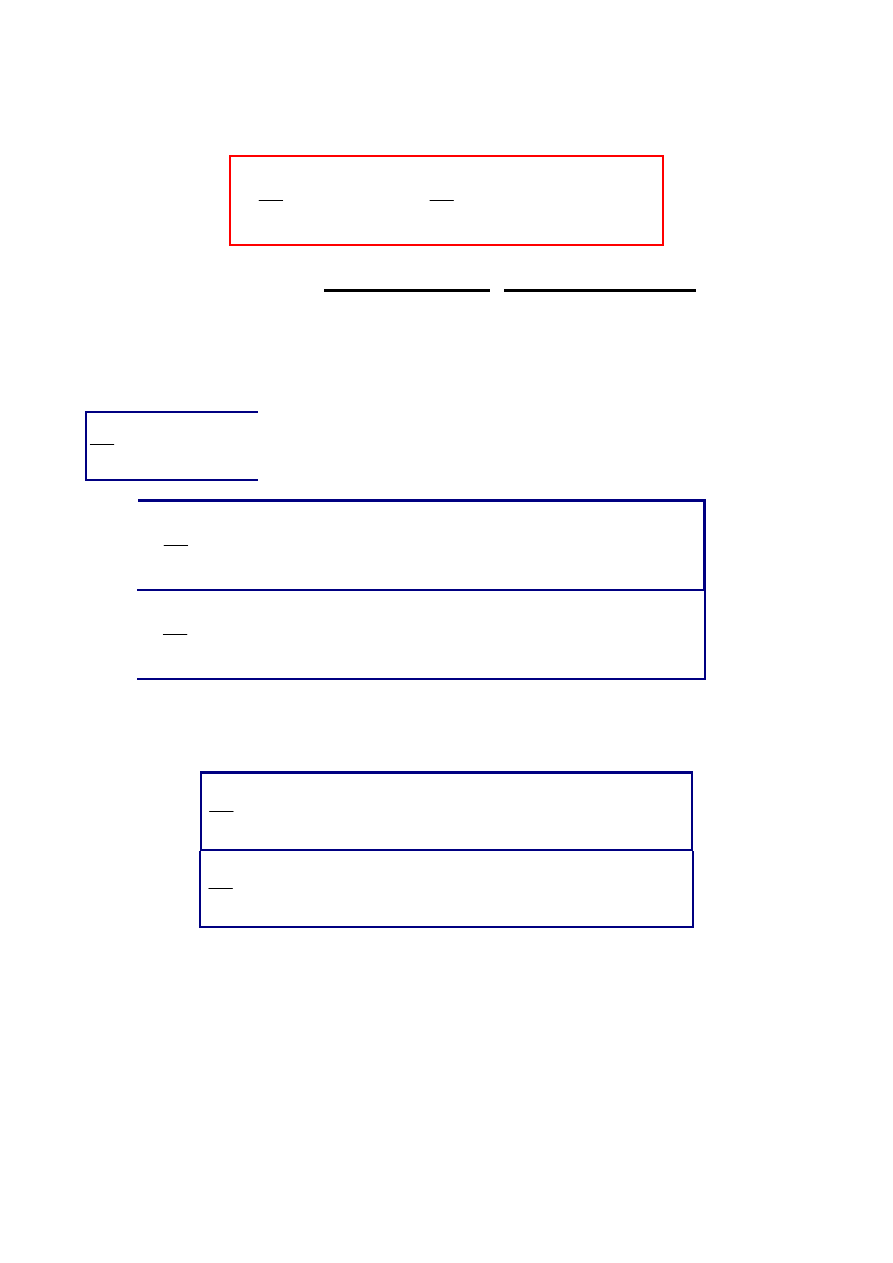
W przypadku wyodrębnienia dwóch par zacisków mamy do czynienia
z
czwórnikiem
. Jeśli wymuszenie jest związane z jedną bramą a odpo-
wiedź z drugą to relacje pomiędzy nimi - stosunek odpowiedzi do wymu-
szenia nazywamy
TRANSMITANCJĄ operatorową
.
F s
( )
R(s)
K(s)
( )
( )
( )
.
P
.
W
zerowych
przy
s
F
s
R
s
K
=
(11.13)
czyli
( )
( ) ( )
s
F
s
K
s
R
=
(11.14)
Wyróżniamy operatorową:
K (s)
u
I (s)=0
2
U (s)
2
U (s)
1
transmitancję napięciową
( )
( )
( )
( )
0
s
I
1
2
u
2
s
U
s
U
s
K
=
=
(11.15a)
K (s)
iu
I (s)=0
2
U (s)=0
2
U (s)
1
transmitancję prądowo-napięciową
( )
( )
( )
( )
0
s
U
1
2
u
i
2
s
U
s
I
s
K
=
=
(11.15b)
K (s)
i
I (s)
2
I (s)
1
U (s)=0
2
transmitancję prądową
( )
( )
( )
( )
0
s
U
1
2
i
2
s
I
s
I
s
K
=
=
(11.15c)
K (s)
ui
I (s)=0
2
U (s)
2
I (s)
1
transmitancję napięciowo-prądową
( )
( )
( )
( )
0
s
I
1
2
i
u
2
s
I
s
U
s
K
=
=
(11.15d)
- 7 -
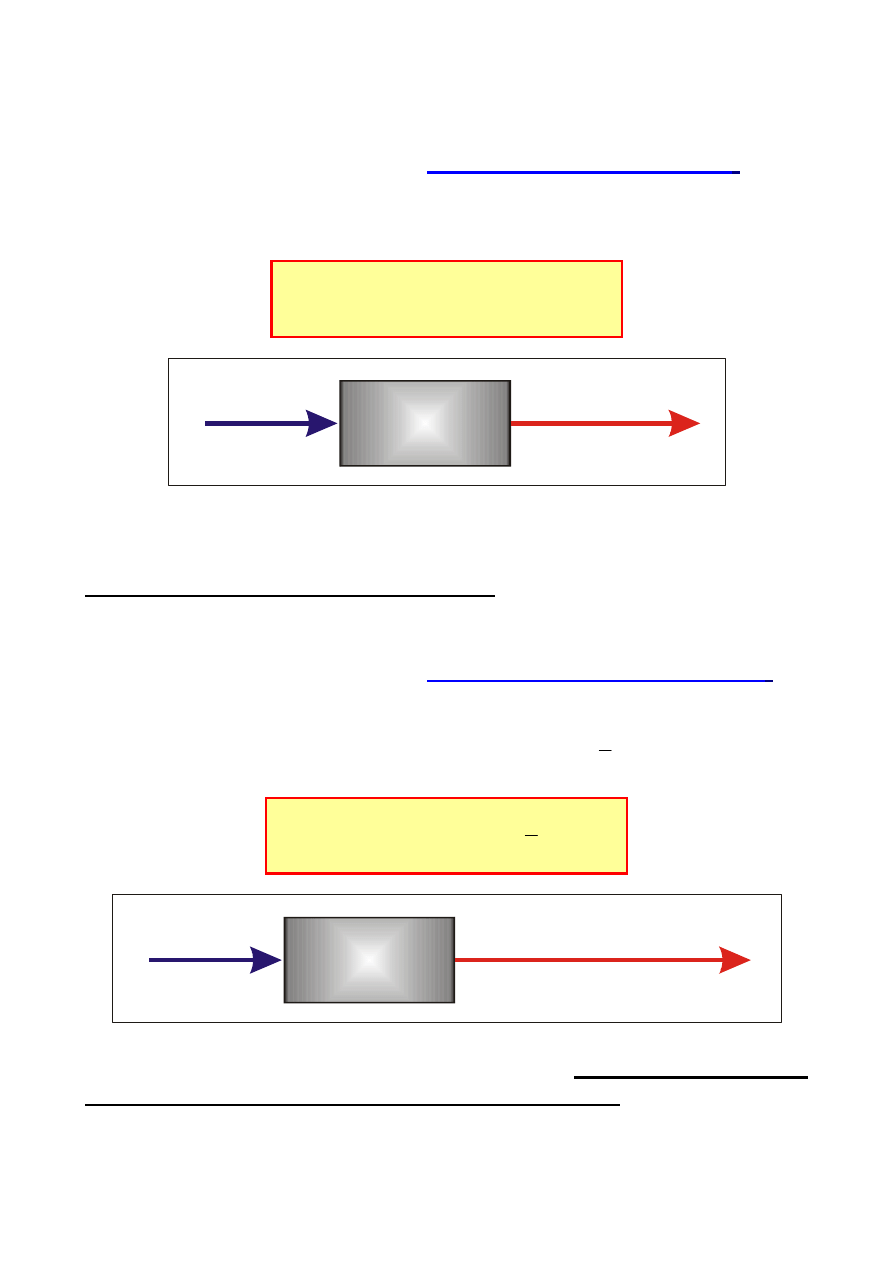
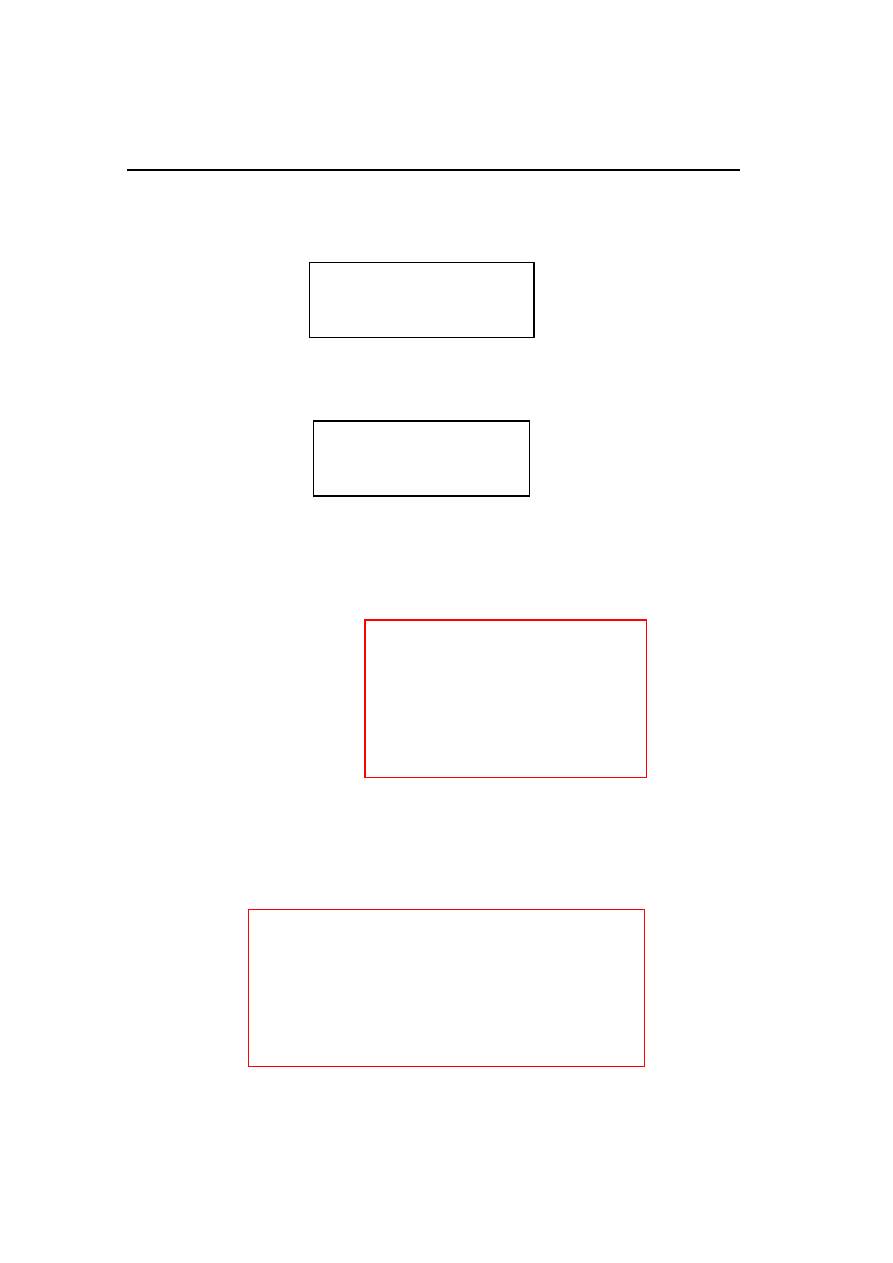
Rozpatrzmy dwa szczególne przypadki funkcji wymuszającej f(t)
①
Gdy funkcją wymuszającą jest
funkcja impulsowa Diraca
δ(t
)
Czyli
( ) ( )
( )
[ ]
( )
1
=
=
→
=
s
F
t
t
t
f
δ
δ
L
wówczas
( )
( ) ( )
( )
( )
s
K
s
K
s
F
s
K
s
R
=
=
=
1
(11.16)
F s
( )=1
R(s)=K(s)
K(s)
Oznacza to, że funkcja transmitancji K(s) jest tożsama z operatorową
odpowiedzią układu na wymuszenie impulsowe. Można zatem nazwać ją
operatorową funkcją impulsową układu.
②
Gdy funkcją wymuszającą jest
funkcja skoku jednostkowego 1(t
)
Czyli
( ) ( )
( )
[ ]
( )
s
s
F
t
t
t
f
1
1
1
=
=
→
=
L
wówczas
( )
( ) ( )
( )
( )
s
H
s
s
K
s
F
s
K
s
R
=
=
=
1
(11.17)
F s
( )=1/s
R(s)=K(s)/s=H(s)
K(s)
Tę szczególną odpowiedź H(s) nazywamy operatorową odpowie-
dzią układu na wymuszenie skokiem jednostkowym.
- 8 -
Zatem relacje pomiędzy operatorową funkcją impulsową układu K(s)
i operatorową odpowiedzią układu na wymuszenie skokiem jednostkowym
H(s) są następujące:
( )
( )
( )
( )
⎪⎭
⎪
⎬
⎫
=
=
s
H
s
s
K
s
s
K
s
H
(11.18)
Znajomość jednej z tych funkcji pozwala łatwo określić drugą.
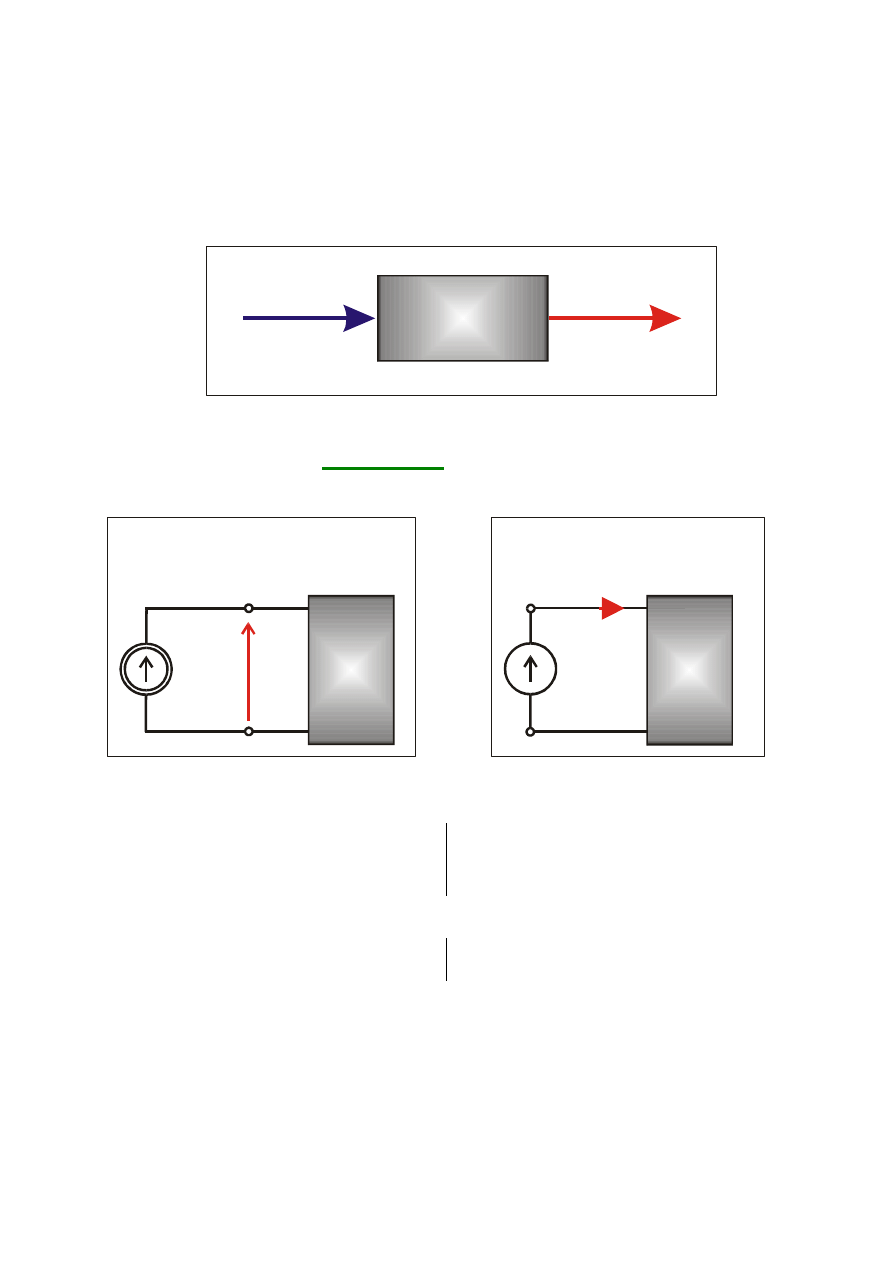
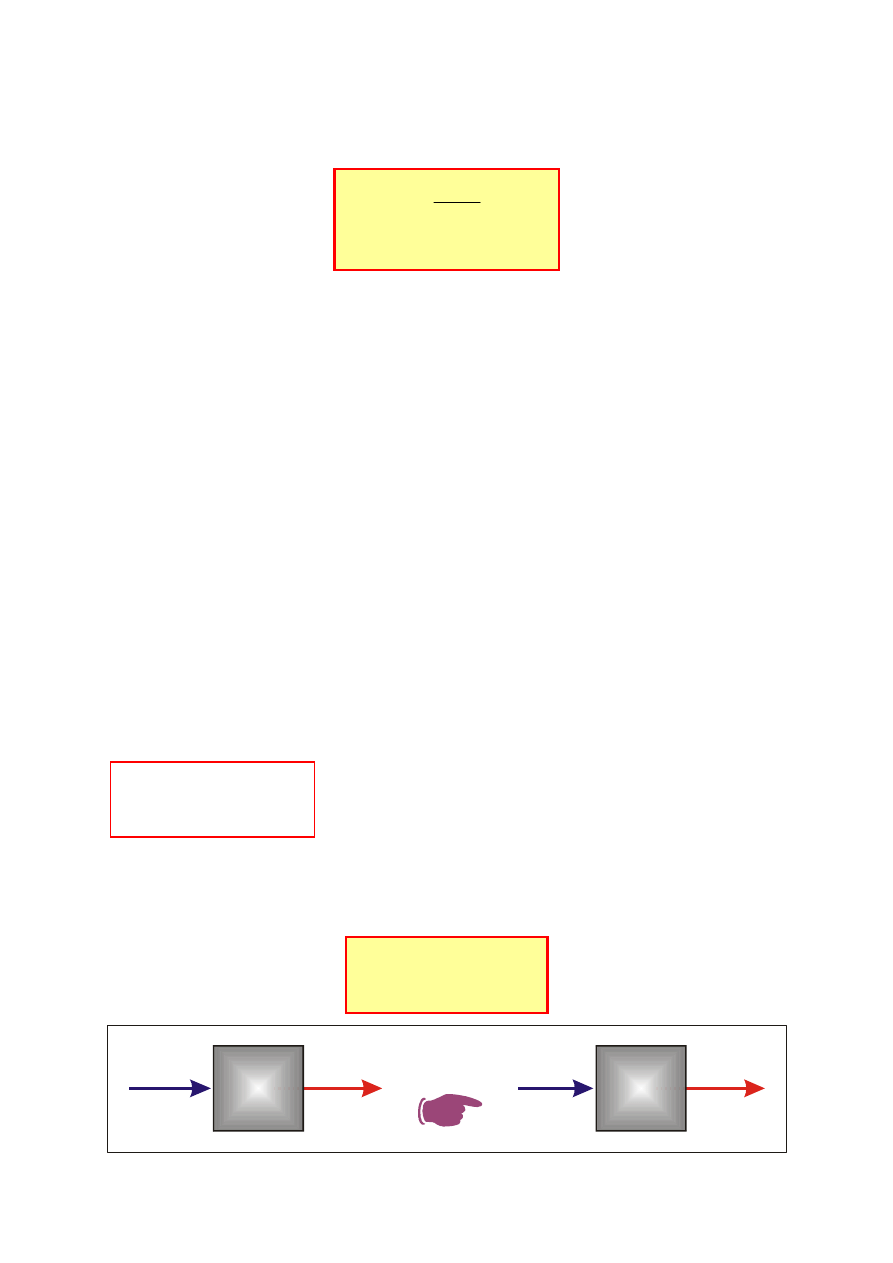
11.3. CHARAKTERYSTYKI CZASOWE
Czasową charakterystykę układu o określonym wejściu i
wyjściu stanowi przebieg sygnału wyjściowego, gdy na wej-
ściu działa wymuszenie będące sygnałem wzorcowym.
Najczęściej używanymi sygnałami wzorcowymi w procesach bada-
nia układów są:
①
sygnał impulsowy
δ(t)
②
sygnał skoku jednostkowego 1(t)
______________________________
Rozpatrzmy ponownie zależność (11.14)
( )
( ) ( )
s
F
s
K
s
R
=
gdzie:
F(s) =
L
[
f(t)] – jest transformatą wymuszenia
K(s) =
L
[
k(t)] – jest transmitancją operatorową
Zatem zgodnie z twierdzeniem Borela (11.7b) oryginał odpowiedzi
r(t) określony jest funkcją splotu
( ) ( ) ( )
t
f
t
k
t
r
*
=
(11.19)
F s
( )
R(s)
K(s)
f(t)
r(t)
*k(t)
L
-1
- 9 -
①
Jeśli
sygnałem wzorcowym
jest
funkcja impulsowa Diraca
δ(t)
to zgodnie z (11.19) i (11.16)
( ) ( ) ( ) ( )
( )
( )
[
]
( )
t
k
s
K
t
r
t
k
t
t
k
t
r
=
=
=
=
−1
*
L
δ
(11.20)
zatem
k(t)
– zwana
CHARAKTERYSTYKĄ IMPULSOWĄ UKŁADU
(
funkcją/charakterystyką impulsową)
jest tożsama z odpowiedzią układu na wymuszenie impulsem
Diraca.
②
Jeśli
sygnałem wzorcowym
jest
funkcja skoku jednostkowego 1(t)
to zgodnie z (11.17)
( )
( )
( )
[
]
( )
t
h
s
H
s
K
s
t
r
=
=
⎥⎦
⎤
⎢⎣
⎡
=
−
−
1
1
1
L
L
(11.21)
zatem
h(t)
– zwana
CHARAKTERYSTYKĄ SKOKOWĄ UKŁADU
(funkcją/charakterystyką przejściową)
jest tożsama z odpowiedzią układu na wymuszenie skokiem
jednostkowym.
Z relacji (11.18) wynikają następujące związki pomiędzy charakte-
rystykami czasowymi układu:
( )
( )
( )
( )
( )
( )
( )
⎪
⎪
⎭
⎪
⎪
⎬
⎫
=
⎯
⎯ →
⎯
=
=
⎯
⎯ →
⎯
=
−
−
∫
t
d
t
h
d
t
k
s
H
s
s
K
d
k
t
h
s
s
K
s
H
t
1
1
0
)
(
L
L
τ
τ
(11.22)
- 10 -
Znając charakterystykę czasową układu r
s
(t) jako odpowiedź na
sygnał wzorcowy f
s
(t), możemy wyznaczyć odpowiedź układu na do-
wolny sygnał przyczynowy, korzystając z zależności
( )
( )
( ) ( )
⎥
⎦
⎤
⎢
⎣
⎡
=
−
s
F
s
F
s
R
t
r
s
s
1
L
(11.23)
♦
Mając
charakterystykę impulsową k(t)
można wyznaczyć odpo-
wiedź układu na dowolny sygnał przyczynowy f(t), korzystając z twier-
dzenia Borela (
11.7
) oraz definicji splotu (
11.1
) i jego własności (
11.2
):
( ) (
)
τ
τ
τ
d
t
f
k
t
r
t
∫
−
=
0
)
(
(11.24a)
(
) ( )
τ
τ
τ
d
f
t
k
t
r
t
∫
−
=
0
)
(
(11.24b)
♦
Mając
charakterystykę skokową h(t)
można wyznaczyć odpowiedź
układu na dowolny sygnał przyczynowy f(t), korzystając z twierdzenia o
transformacie pochodnej splotu (
11.8
) oraz całki Duhamela (
10.10
):
( ) ( ) ( )
( ) (
)
τ
τ
τ
d
t
f
h
f
t
h
t
r
t
∫
−
+
=
0
'
0
(11.25a)
( ) ( ) ( )
(
) ( )
τ
τ
τ
d
f
t
h
t
f
h
t
r
t
∫
−
+
=
0
'
0
(11.25b)
( ) ( ) ( )
(
) ( )
τ
τ
τ
d
f
t
h
f
t
h
t
r
t
∫
−
+
=
0
'
0
(11.25c)
( ) ( ) ( )
( ) (
)
τ
τ
τ
d
t
f
h
t
f
h
t
r
t
∫
−
+
=
0
'
0
(10.25d)
- 11 -
11.4. ZWIĄZKI MIĘDZY CHARAKTERYSTYKAMI
CZASOWYMI I CZĘSTOTLIWOŚCIOWYMI
WPROWADZENIE
Znajomość transmitancji bądź immitancji operatorowej układu pozwa-
la wyznaczyć charakterystykę częstotliwościową stanu ustalonego dla
układu klasy SLS, stabilnego, prawie we wszystkich punktach
ω∈(0.∞),
przez proste podstawienie s=j
ω. Zatem
( )
( )
ω
ω
j
s
s
K
j
K
=
=
(11.26)
Wykorzystując jednostronne przekształcenie Laplace’a (10.13) mo-
żemy powyższe równanie przekształcić w zależność słuszną dla
ω∈(0.∞)
( )
( )
( )
∫
∫
∞
−
=
∞
−
=
=
0
0
t
d
e
t
k
t
d
e
t
k
j
K
t
j
j
s
t
s
ϖ
ω
ω
(11.27)
Otrzymujemy zatem
jednostronne przekształcenie Fouriera
, które istnieje
wtedy i tylko wtedy, gdy
( )
∞
<
∫
∞
dt
t
k
0
Jak wiemy K(j
ω), czyli charakterystyka amplitudowo-fazowa, jest
wielkością zespoloną, którą możemy przedstawić w postaci algebraicznej
lub wykładniczej:
( )
( )
( )
( )
( )
ω
ω
ω
ω
ω
j
K
j
j
K
j
e
K
e
j
K
j
K
arg
arg
=
=
- 12 -
ZWIAZKI GRANICZNE CHARAKTERYSTYK
Twierdzenie o wartości początkowej i końcowej funkcji f(t):
- jeśli
( )
( )
[ ]
t
f
s
F
L
=
oraz istnieje granica
( )
( )
+
→
=
+
0
lim
0
f
t
f
t
, to
( )
( )
+
∞
→
= 0
lim
f
s
sF
s
(11.28)
- jeśli
( )
( )
[ ]
t
f
s
F
L
=
oraz istnieje granica
( )
( )
∞
=
∞
→
f
t
f
t
lim
, to
( )
( )
∞
=
→
f
s
sF
s
0
lim
(11.29)
Zatem jeśli operatorową funkcją układu jest transmitancja K(s) a cha-
rakterystyka impulsowa posiada skończone granice zarówno dla t
→0
+
jak i
t
→∞, to słuszne są związki
( ) ( )
( )
( )
⎪
⎪
⎭
⎪
⎪
⎬
⎫
=
∞
=
+
∞
→
→
0
lim
lim
0
k
s
K
s
k
s
K
s
s
s
(11.30)
Jeśli weźmiemy pod uwagę charakterystykę skokową (przejściową)
układu, to możemy zapisać przy założeniu, że h(t) posiada granice zarów-
no dla t
→0
+
jak i t
→∞ oraz uwzględniając zależności (11.18)
( )
( ) ( )
( )
( )
( )
⎪
⎪
⎭
⎪
⎪
⎬
⎫
=
=
∞
=
=
+
∞
→
∞
→
→
→
0
lim
lim
lim
lim
0
0
h
s
K
s
H
s
h
s
K
s
H
s
s
s
s
s
(11.31)
następnie uwzględniając wzór (11.26) otrzymujemy:
- 13 -
( )
( ) ( )
( )
( )
( )
⎪
⎪
⎭
⎪
⎪
⎬
⎫
=
=
∞
=
=
+
∞
→
=
∞
→
→
=
→
0
lim
lim
lim
lim
0
0
h
K
s
K
h
K
s
K
j
s
s
j
s
s
ω
ω
ω
ω
ω
ω
(11.32)
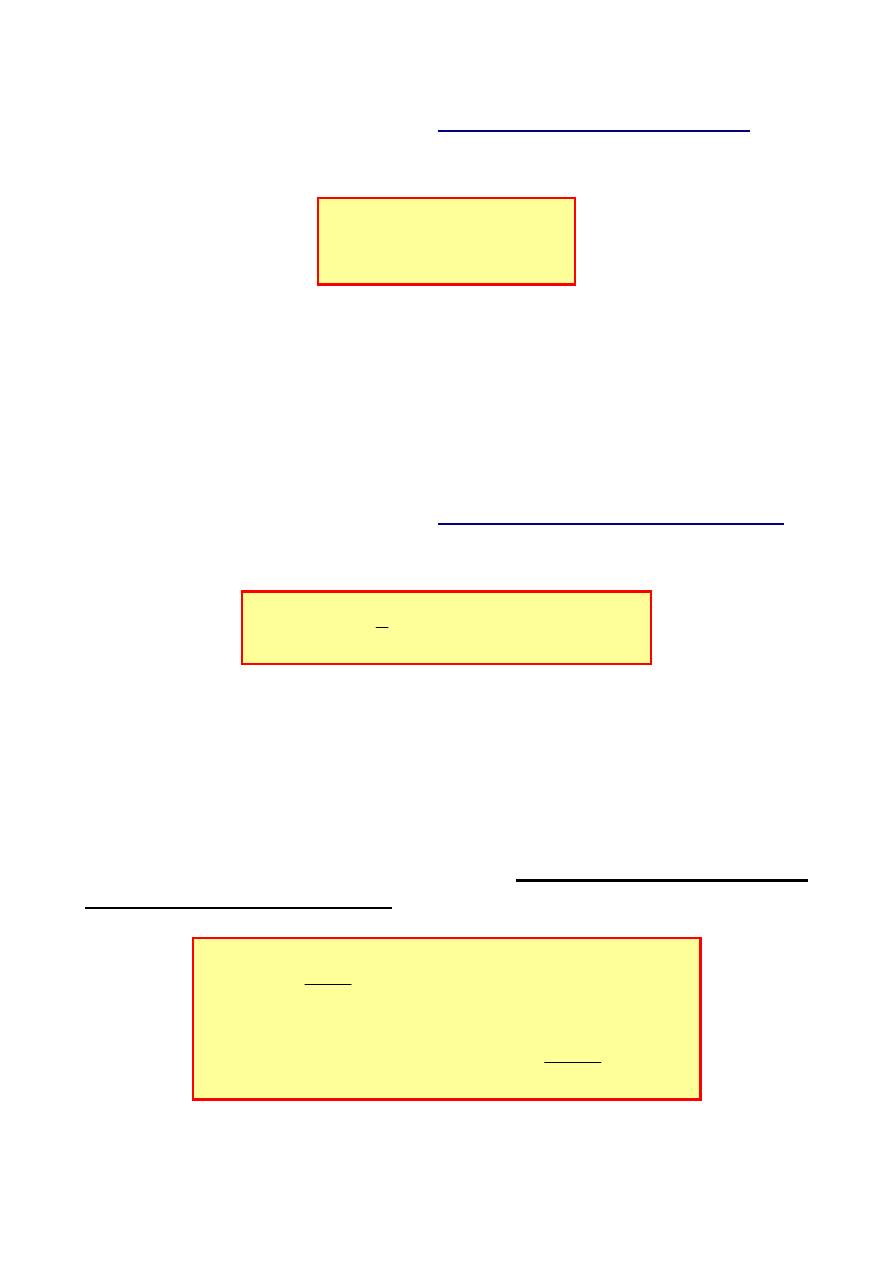
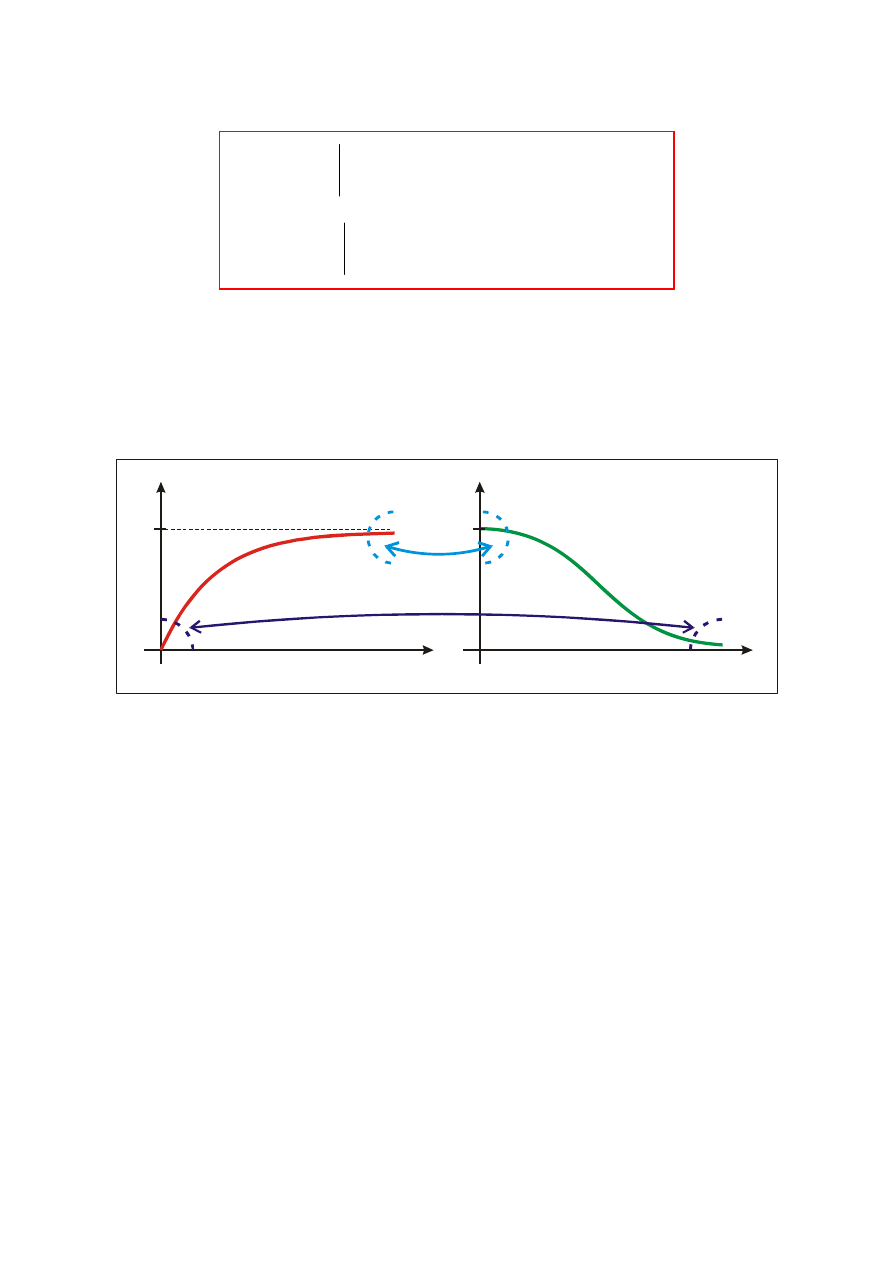
Są to związki o bardzo dużym znaczeniu praktycznym. Wynika z nich
jednoznacznie, że jeśli znamy np. charakterystykę amplitudową K(
ω), to
jej graniczne wartości określają jednoznacznie graniczne wartości funkcji
skokowej (przejściowej) h(t) i odwrotnie.
t
1
0
h(t)
ω
1
0
K( )
ω
ZWIĄZKI PARAMETRÓW CHARAKTERYSTYK
Jako podstawowe parametry charakterystyk czasowych przyjmuje się
między innymi:
t
n
– czas narastania,
t
o
– czas opóźnienia,
Z - zwis
- 14 -
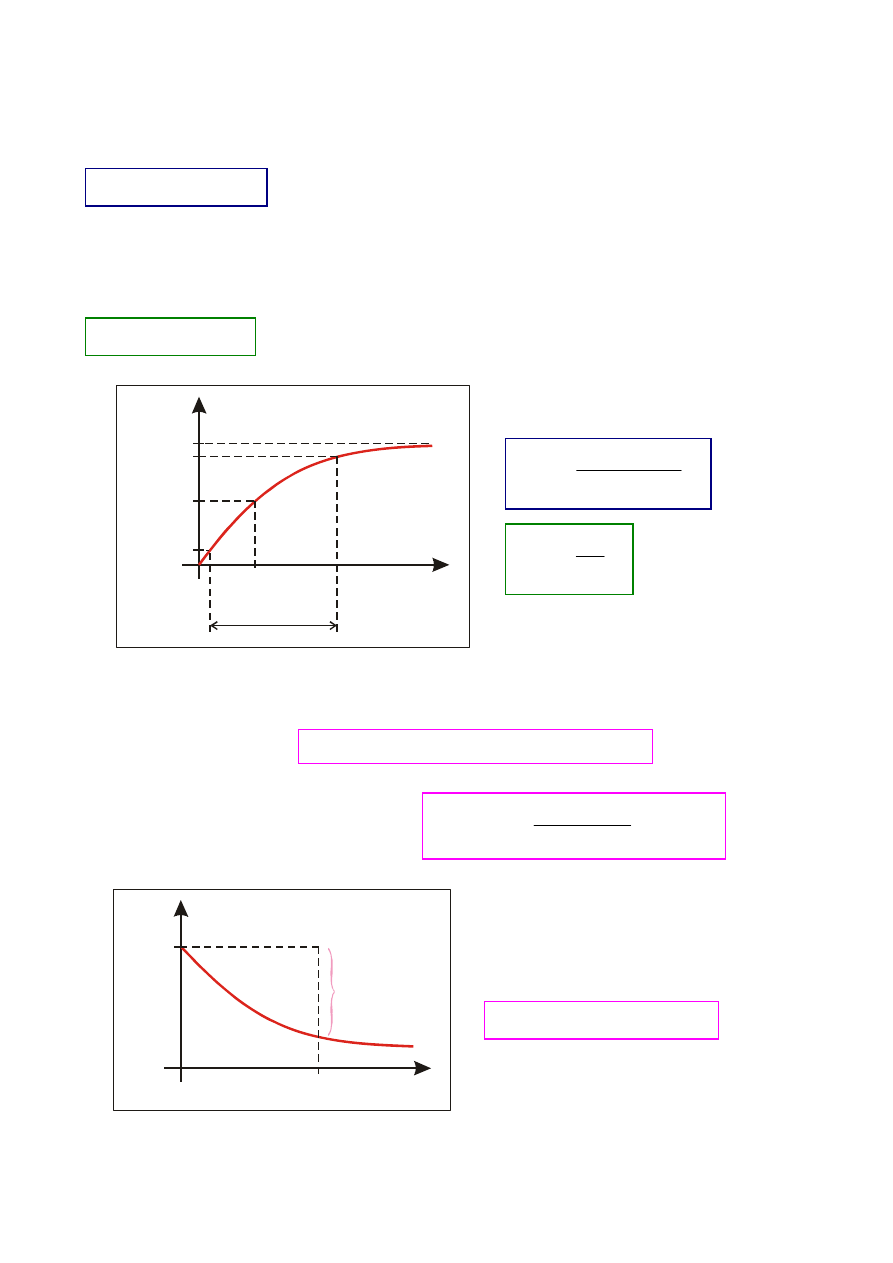
Czas narastania t
n
- układu dolnoprzepustowego definiujemy jako czas
wzrostu charakterystyki skokowej (przejściowej)
układu od 0,1 do 0,9 wartości ustalonej
1
,
0
9
,
0
t
t
t
n
−
=
(11.33)
Czas opóźnienia t
o
- układu dolnoprzepustowego definiujemy jako czas
wzrostu charakterystyki skokowej (przejściowej)
układu od 0 do 0,5 wartości ustalonej
0
5
,
0
t
t
t
o
−
=
(11.34)
t
h =1
ust
0
h(t)
t
o
t
n
0,1
0,5
0,9
g
n
f
t
45
,
0
35
,
0
÷
=
(11.35)
g
o
f
t
1
,
0
=
(11.36)
Funkcję zwisu Z(t)
- układu górnoprzepustowego definiujemy:
( ) ( )
( ) ( ) ( )
t
h
h
t
h
t
h
t
Z
ust
−
=
−
=
0
(11.37)
lub funkcję zwisu w procentach
( ) ( ) ( )
( )
%
100
0
0
%
⋅
−
=
h
t
h
h
t
Z
(11.38)
t
h(0)
0
h(t)
t
i
Z(t
i
)
Dla małych wartości t
( )
t
f
t
Z
g
π
200
%
≈
(11.39)
- 15 -
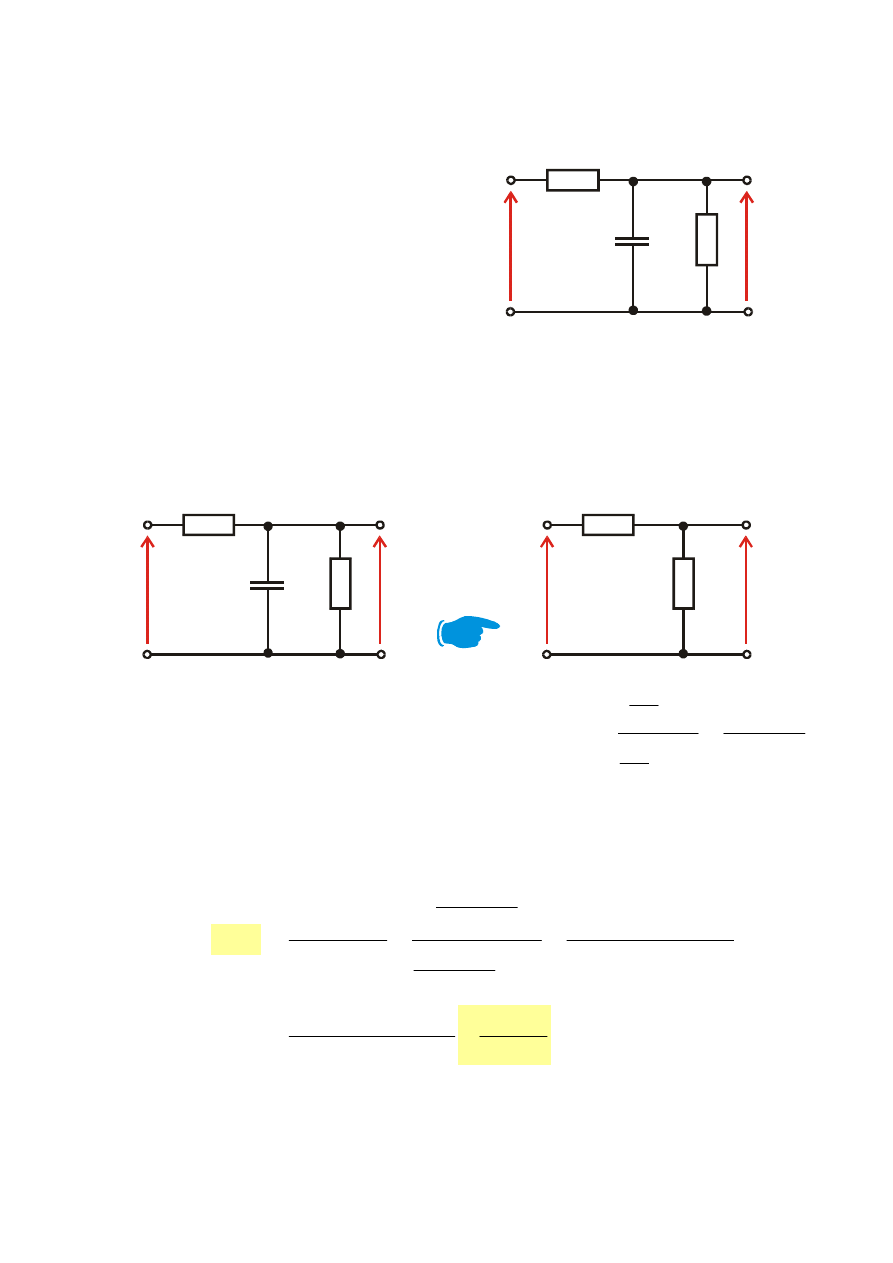
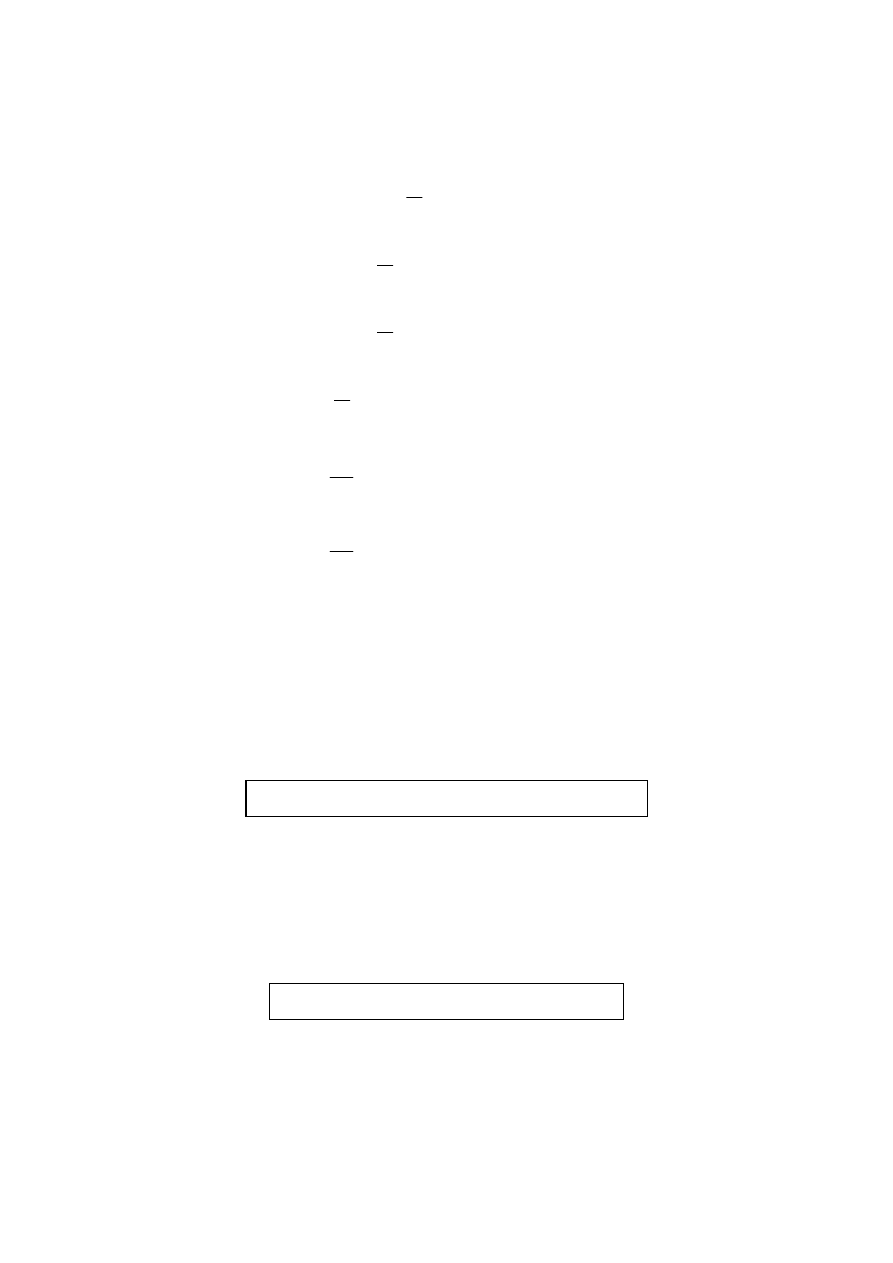
PRZYKŁAD
Dla układu przedstawionego na
rysunku, mając dane R
1
=9k
Ω,
R
2
=1k
Ω, C=1mF, wyznaczyć:
1. charakterystykę skokową,
2. czas narastania i opóźnienia,
3.
charakterystykę impulsową.
C
R
1
u
1
(t)
R
2
u
2
(t)
Ad.1.
• Podajemy skok jednostkowy na wejście układu i przedstawiamy
schemat operatorowy układu
1/sC
R
1
U
1
(s)
R
2
U
2
(s)
R
1
U
1
(s)
Z
2
(s)
U
2
(s)
gdzie:
( )
C
sR
R
R
sC
R
sC
s
Z
2
2
2
2
2
1
1
1
+
=
+
=
• Korzystając z dzielnika napięcia wyznaczamy operatorową funkcję
układu
( )
s
K
( )
( )
(
)
C
sR
R
R
R
R
C
sR
R
C
sR
R
R
s
Z
s
Z
2
1
2
2
1
2
2
2
2
1
2
2
1
1
1
+
+
=
+
+
+
=
+
=
C
R
sR
R
R
R
2
1
1
2
2
+
+
=
s
9
10
1
+
=
- 16 -
• Wyznaczamy operatorową odpowiedź układu na wymuszenie sko-
kiem jednostkowym (zależność 11.17)
( )
( )
(
)
s
s
s
s
s
s
K
s
H
9
10
1
9
10
1
+
=
+
=
=
UWAGA: znając H(s) możemy wyznaczyć (zal.11.31)
( )
( )
(
)
0
9
10
1
lim
9
10
1
lim
lim
0
=
+
=
+
=
=
∞
→
∞
→
∞
→
+
s
s
s
s
s
H
s
h
s
s
s
( )
( )
1
,
0
9
10
1
lim
lim
0
0
=
+
=
=
∞
→
→
s
s
H
s
h
s
s
• Wyznaczamy charakterystykę czasową skokową układu (zal.11.21)
( )
( )
[
]
(
)
⎥
⎦
⎤
⎢
⎣
⎡
+
=
=
−
−
s
s
s
H
t
h
9
10
1
1
1
L
L
(
)
a
s
s
1
+
1
−
L
→
(
)
t
a
e
1
a
1
−
−
Lp.9.
( )
(
)
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛ +
=
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛ +
=
⎥
⎦
⎤
⎢
⎣
⎡
+
=
−
−
−
9
10
1
9
1
9
10
9
1
10
9
1
1
1
1
s
s
s
s
s
s
t
h
L
L
L
( )
( )
1
1
1
9
10
1
9
1
9
10
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
− t
e
t
h
- 17 -
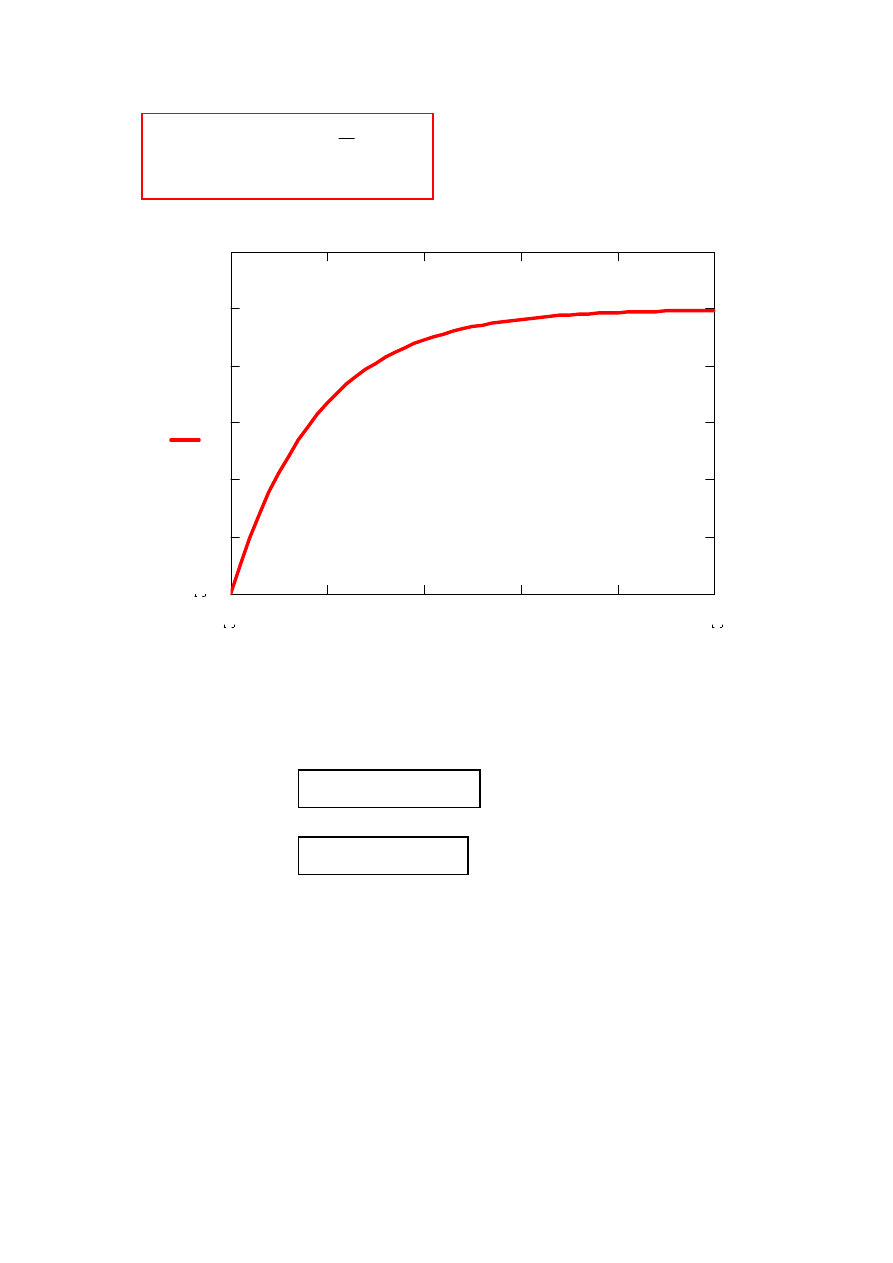
( )
( )
t
e
t
h
t
1
1
,
0
1
,
0
9
10
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
−
Ad.2.
Czas narastania t
n
-
1
,
0
9
,
0
t
t
t
n
−
=
Czas opóźnienia t
o
-
0
5
,
0
t
t
t
o
−
=
Wiemy już, że
( )
0
0
0
=
=
+
h
t
( )
1
,
0
=
∞
= h
t
ustal
0.12
0
h t
( )
5
0
t
0
1
2
3
4
5
0
0.02
0.04
0.06
0.08
0.1
- 18 -
( )
09
,
0
1
,
0
9
,
0
9
,
0
=
⋅
=
t
h
09
,
0
1
,
0
1
,
0
9
10
=
−
− t
e
1
,
0
09
,
0
1
,
0
9
10
−
=
−
− t
e
01
,
0
1
,
0
9
10
−
=
−
− t
e
1
,
0
9
10
=
− t
e
( )
1
,
0
ln
9
10 =
−
t
303
,
2
9
10
−
=
−
t
stąd:
073
,
2
9
,
0
=
t
( )
01
,
0
1
,
0
1
,
0
1
,
0
=
⋅
=
t
h
stąd:
095
,
0
1
,
0
=
t
czyli:
977
,
1
095
,
0
073
,
2
1
,
0
9
,
0
=
−
=
−
=
t
t
t
n
( )
05
,
0
1
,
0
5
,
0
5
,
0
=
⋅
=
t
h
stąd:
624
,
0
5
,
0
=
t
czyli:
624
,
0
0
624
,
0
0
5
,
0
=
−
=
−
=
t
t
t
o
- 19 -
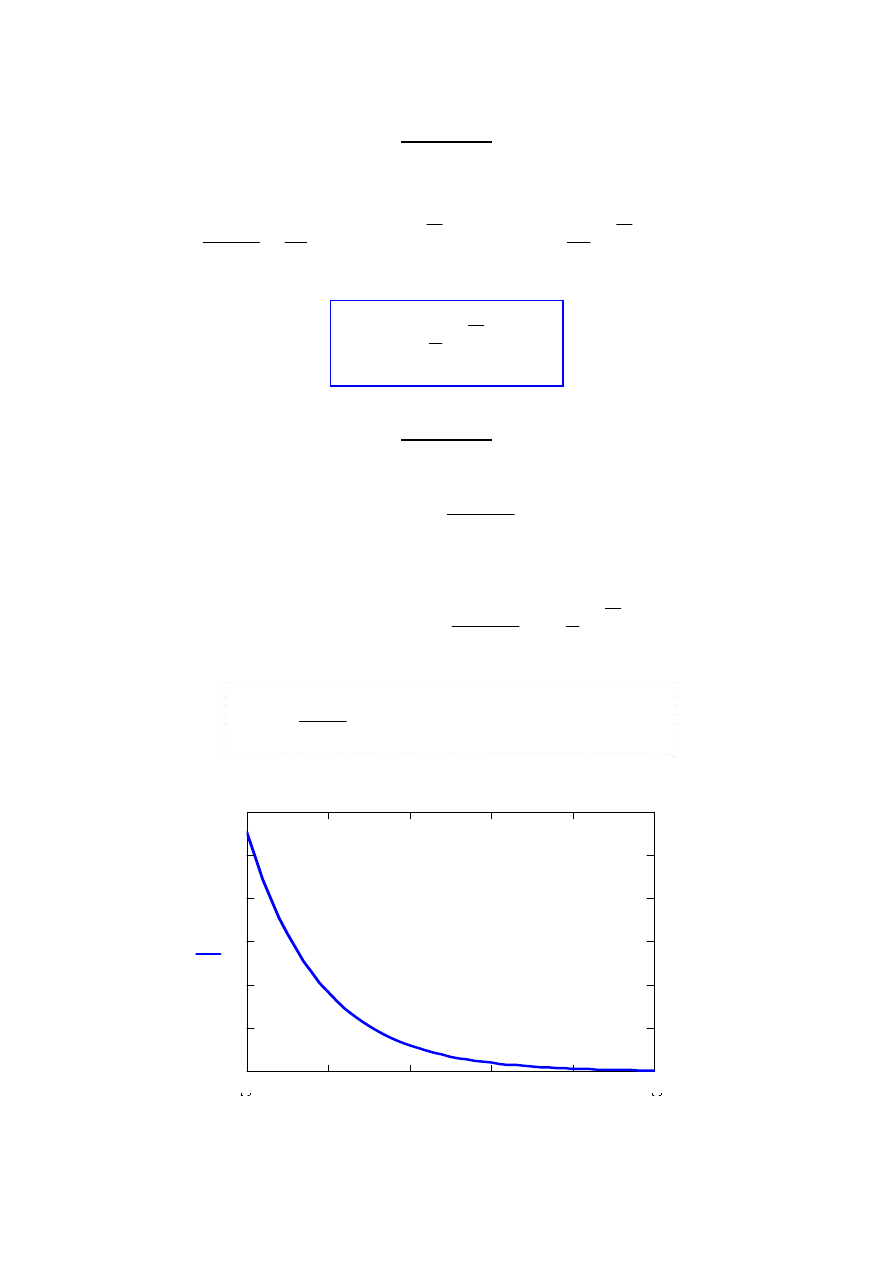
Ad.3.
Sposób 1
Znając charakterystykę skokową, można wykorzystać zal. 11.22.
( )
( )
( )
( )
t
e
t
e
dt
d
t
d
t
h
d
t
k
t
t
1
9
10
1
,
0
1
1
,
0
1
,
0
9
10
9
10
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
=
−
−
( )
( )
t
e
t
k
t
1
9
1
9
10
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
−
Sposób 2
Znając operatorową funkcję układu
( )
s
s
K
9
10
1
+
=
wykorzystujemy zal.11.20:
( )
( )
[
]
( )
t
e
s
s
K
t
k
t
1
9
1
9
10
1
9
10
1
1
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
⎥⎦
⎤
⎢⎣
⎡
+
=
=
−
−
−
L
L
a
s
1
+
1
−
L
→
t
a
e
−
Lp.5.
0.12
0
k t
( )
5
0
t
0
1
2
3
4
5
0
0.02
0.04
0.06
0.08
0.1
Wyszukiwarka
Podobne podstrony:
1 Wyklad OiSEid 8743 Nieznany (2)
10 11 wyklad calka oznaczonaid Nieznany (2)
2 Wyklad OiSEid 19737 Nieznany
2010 11 WIL Wyklad 07id 27178 Nieznany (2)
2010 11 02 WIL Wyklad 02id 2717 Nieznany (2)
2010 11 WIL Wyklad 03id 27176 Nieznany (2)
2010 11 04 WIL Wyklad 04id 2717 Nieznany
2010 11 WIL Wyklad 06id 27177 Nieznany (2)
11 wyklad wzrost gospodarczy WI Nieznany (2)
2010 11 08 WIL Wyklad 08id 2717 Nieznany
7 wyklad 23 11 2010 id 44996 Nieznany (2)
8 wyklad 30 11 2010 id 46777 Nieznany (2)
2010 11 01 WIL Wyklad 01id 2717 Nieznany (2)
11 12 09 wyklad algebraid 12337 Nieznany
2015 01 11 ZUSO Wyklad 07id 285 Nieznany
11 wyklad sys o przid 12675 ppt
LOGIKA wyklad 5 id 272234 Nieznany
ciagi liczbowe, wyklad id 11661 Nieznany
0 konspekt wykladu PETid 1826 Nieznany
więcej podobnych podstron