11/ 1
11. DRGANIA TŁUMIONE I WYMUSZONE
(4 strony)
DRGANIA TŁUMIONE
Drgania układu na który działa siła tłumiąca proporcjonalna do wartości prędkości, ale
przeciwnie skierowana
dt
dx
F
r
β
−
=
(tak jak na przykład siła lepkości) opisuje równanie:
2
2
d x
dx
m
kx
dt
dt
β
= − −
po uporządkowaniu przyjmuje postać:
2
2
0
2
0
d x
dx
x
dt
dt
γ ω
+
+
=
gdzie
m
/
β
γ
=
.
Równanie to ma dwa rodzaje rozwiązań, inne dla
ω
0
> γ/2
ι
inne dla
ω
0
> γ/2.
•
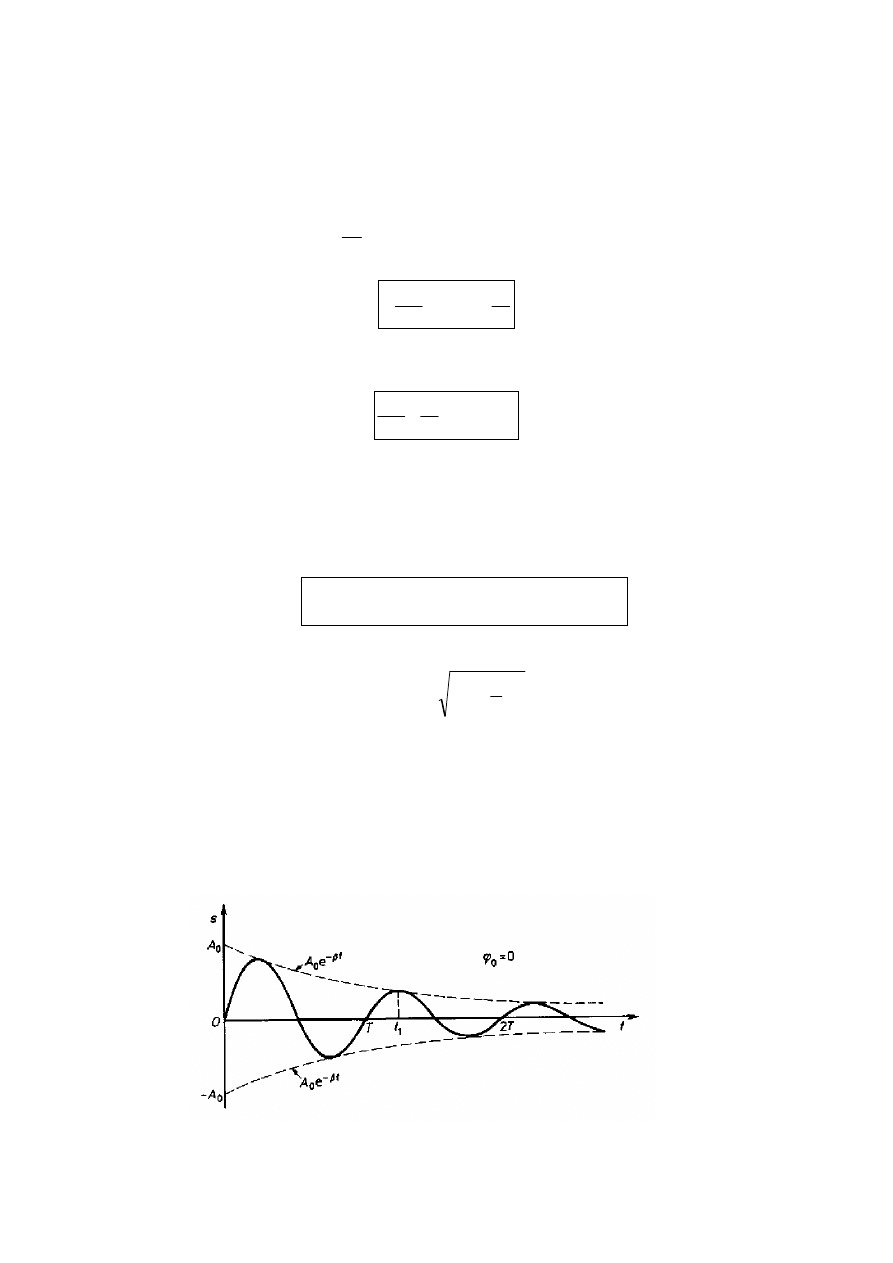
W przypadku, gdy
ω
0
> γ/2
rozwiązanie jest postaci
)
cos(
0
2
/
0
ϕ
ω
γ
γ
+
=
−
t
e
A
x
t
opisujące drgania o częstości
2
2
0
4
1
γ
ω
ω
γ
−
=
,
malejącej z czasem amplitudzie
/ 2
0
( )
t
A t
A e
γ
−
=
i przesunięciu fazowym
ϕ
0
.
Wartości A
0
i
ϕ
0
można wyznaczyć z wartości początkowych wychylenia z położenia
równowagi x
0
= x(0) oraz prędkości v
0
= v(0)
drgania tłumione
11/ 2
•
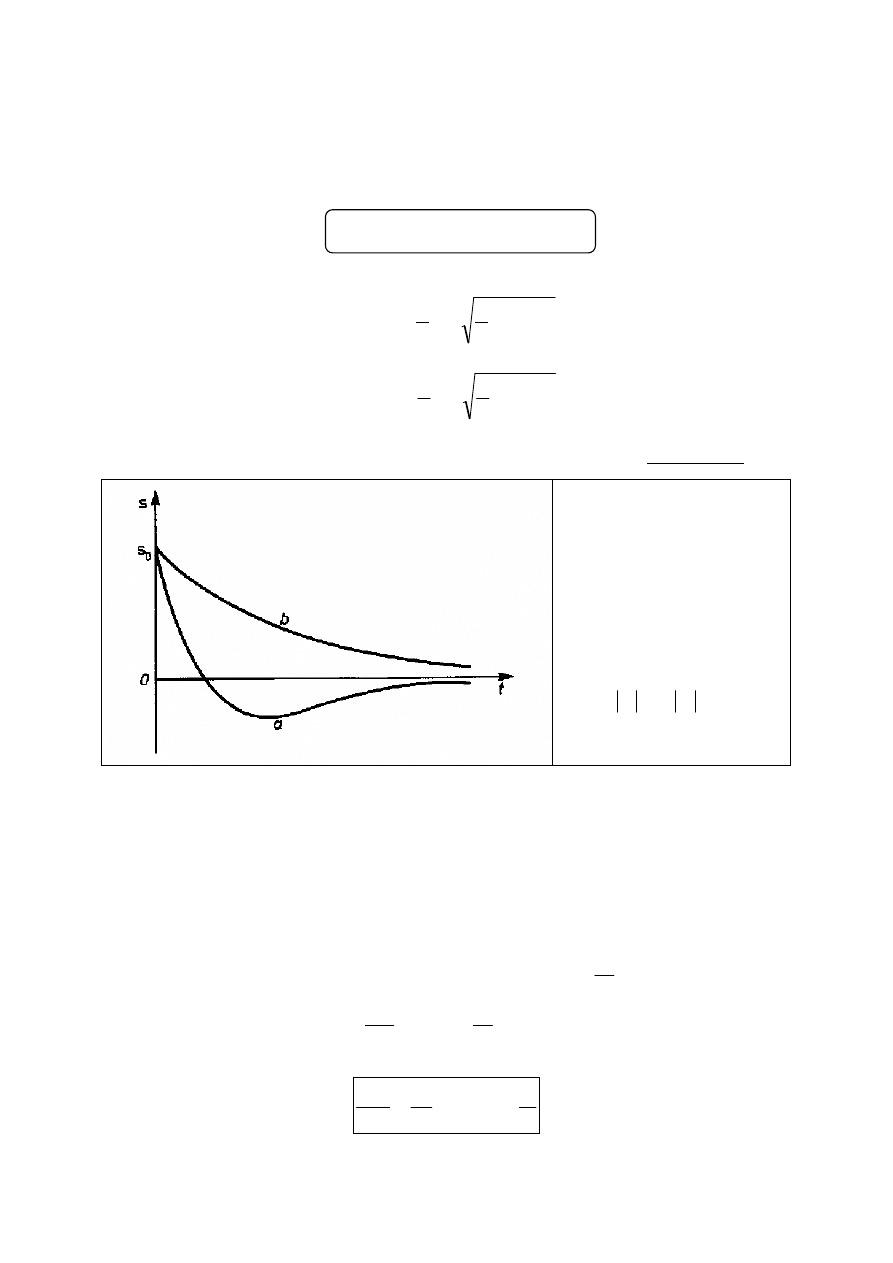
W przypadku gdy
ω
0
< γ/2
rozwiązanie jest sumą dwóch funkcji wykładniczych
t
a
t
a
e
A
e
A
x
2
1
2
1
−
−
+
=
gdzie
2
0
2
1
4
1
2
1
ω
γ
γ
α
−
−
−
=
oraz
2
0
2
2
4
1
2
1
ω
γ
γ
α
−
+
−
=
Ruch ciała w tym przypadku nie jest okresowy, mówimy, że jest to ruch aperiodyczny
Rozwiązanie typu (a)
występuje gdy v
0
jest
przeciwnie skierowane
do x
0
oraz
0
1
0
x
v
α
>
DRGANIA WYMUSZONE
Drgania wymuszone powstają w układzie pod wpływem zewnętrznego źródła energii o
zmieniającym się w czasie natężeniu np. drganie membrany głośnika pod wpływem
zmiennego pola elektromagnetycznego, drgania obiektu wywołane ruchem podłoża, drgania
w obwodzie elektrycznym wywołane zmiennym napięciem, drgania ładunków w atomach i
cząsteczkach pod wpływem zmiennego pola elektrycznego fali świetlnej.
Równanie drgań wymuszonych siłą F(t) i tłumionych siłą
dt
dx
F
r
β
−
=
jest postaci
)
(
2
2
t
F
dt
dx
kx
dt
x
d
m
+
−
−
=
β
lub w wygodniejszej postaci
m
F
x
dt
dx
dt
x
d
=
+
+
2
0
2
2
ω
γ
11/ 3
gdzie
m
/
β
γ
=
. Podstawiając siłę wymuszającą
)
cos(
0
0
ϕ
ω
+
=
t
F
F
otrzymuje się
rozwiązanie w postaci drgań o tej samej częstości co siła wymuszająca. Wychylenie ciała z
położenia równowagi opisywane jest przez funkcję
)
cos(
0
0
ϕ
θ
ω
+
+
=
t
x
x
o
amplitudzie
(
)
[
]
2
1
2
2
2
2
2
0
0
0
/
ω
γ
ω
ω
+
−
=
m
F
x
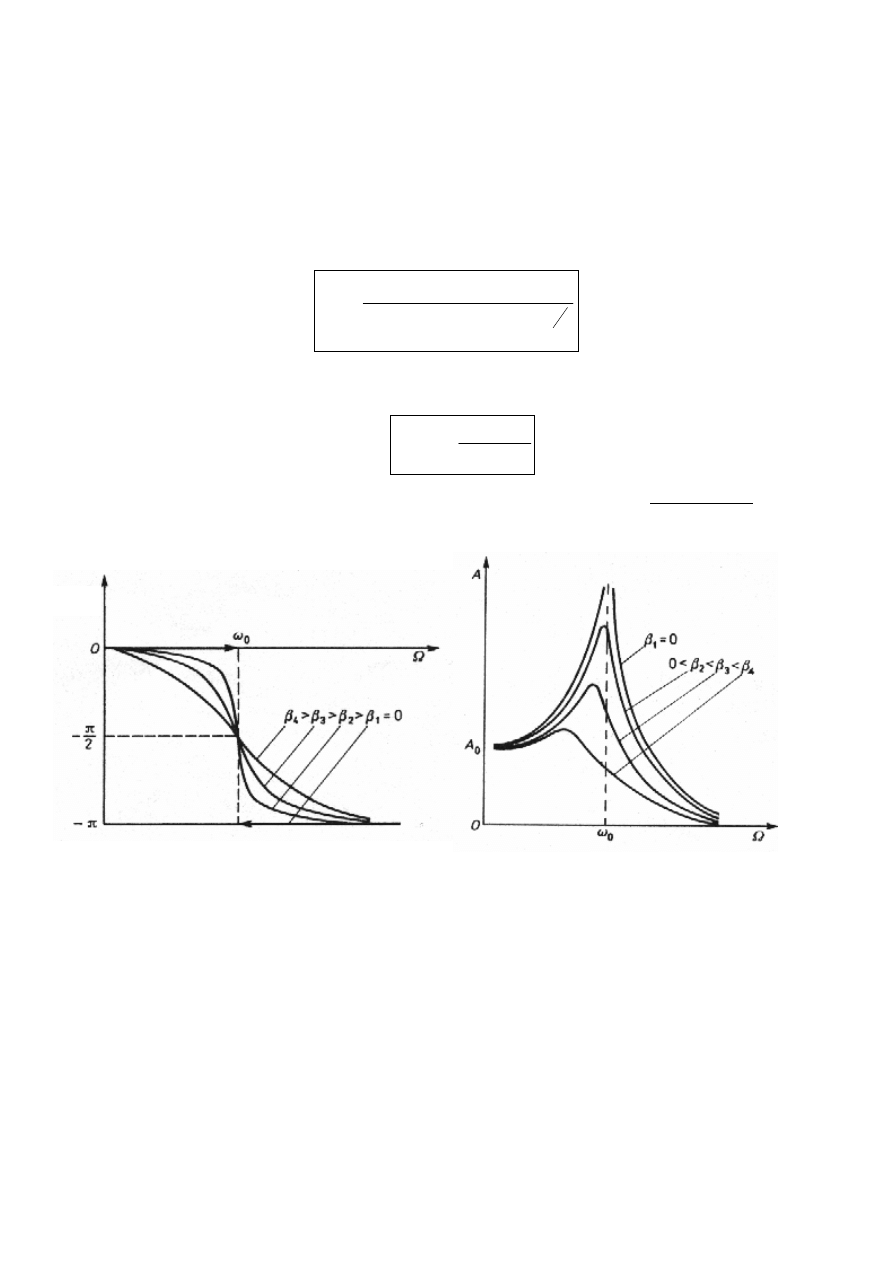
i przesunięciu fazowym
θ
danym równaniem
2
2
0
tg
ω
ω
γω
θ
−
−
=
Kąt
θ
ma wartość ujemną dla wszystkich
ω
, co odpowiada wychyleniu
x
opóźnionemu w
fazie w stosunku do siły F .
dla
β
= 0
amplituda x
0
= C
a różnica faz ,
θ,
jest
równa 0 lub
−π
θ
Wyszukiwarka
Podobne podstrony:
MF10 drgania wymuszone
5 drgania wymuszone, Politechnika Łódzka, Do Wojciechowskiego
Wykład 14 Drgania wymuszone oscylatora harmonicznego ppt
MF13 drgania wymuszone
F13 drgania wymuszone
DRGANIA WYMUSZONE1a
drgania wymuszone nietlumione prezentacja new
drgania wymuszone, TRANSPORT PWR, STUDIA, SEMESTR II, FIZYKA, fizyka-wyklad, zagadnienia opracowane,
Drgania wymuszone z tłumieniem układu o jednym stopniu swobody, wip, Drgania
10 Rezonans w obwodzie szeregowym RLC Elektromagnetyczne drgania wymuszone w obwodzie RLC
Losowe drgania wymuszone fundamentu skrzyniowego
Drgania wymuszone układów o 1 st swobody
MF13 drgania wymuszone
F13 drgania wymuszone
Drgania wymuszone oscylatora tłumionego
Drgania wymuszone nietłumione układu o jednym stswobody, wip, Drgania
fiztomi10, MIBM WIP PW, fizyka 2, laborki fiza(2), 10-Rezonans w obwodzie szeregowym RLC. Elektromag
drgania wymuszone, mechanika 1
więcej podobnych podstron