11. DRGANIA WYMUSZONE (4 strony) Drgania wymuszone powstają w układzie pod wpływem zewnętrznego źródła energii o zmieniającym się w czasie natężeniu np. drganie membrany głośnika pod wpływem zmiennego pola elektromagnetycznego, drgania obiektu wywołane ruchem podłoża, drgania w obwodzie elektrycznym wywołane zmiennym napięciem, drgania ładunków w atomach i cząsteczkach pod wpływem zmiennego pola elektrycznego fali świetlnej.
Równanie ruchu oscylatora z siłą wymuszającą
2
d x
(*) m
= − kx + F( t) - jest równaniem niejednorodnym 2
dt
Funkcja F ( t) może być różnej postaci. Ponieważ dowolną funkcję okresową można przedstawić w postaci szeregu Fouriera a funkcję nieokresową w postaci całki Fouriera przeanalizujmy przypadek
F ( t ) = F ⋅ cos( ω t ) 0
Sprawdźmy czy x = C ⋅ cos( ω t ) jest rozwiązaniem równania ruchu (*), czyli czy układ porusza się w zgodnym rytmie z siłą wymuszającą:
x = C ⋅ cos( ω t )
v = − C ω ⋅ sin( ω t )
2
a = − C ω
⋅ cos( ω t)
podstawiając to do równania (*) otrzymujemy:
2
− mω C ⋅ cos(ω t)
2
= − mω ⋅ C ⋅ cos(ω t) + F ⋅ cos(ω t) 0
0
gdzie
2
ω = k / m jest częstością kątową drgań swobodnych. Po podzieleniu przez cosω t 0
otrzymujemy warunek na C.
F 0
C = m( 2
2
ω − ω )
0
Funkcja x = C ⋅ cos(ω t) jest więc rozwiązaniem równania tylko dla wyznaczonej wartości C.
Masa m drga z częstością siły wymuszającej, a amplituda tych drgań zależy od F , ω i ω : 0
0
a) Jeżeli ω < ω to C > 0 , przesunięcie jest tak samo skierowane jak siła.
0
b) Jeżeli ω > ω to C < 0 , przesunięcie jest odwrotnie skierowane niż siła - przeciwna faza 0
Ponadto przy dużych wartościach
2
2
ω − ω amplituda drgań maleje.
0
c) Jeżeli ω ≈ ω to C → ∞ . Jeżeli częstość siły dobierzemy tak, aby była zgodna z 0
częstością drgań własnych to otrzymujemy bardzo duże amplitudy. Oczywiście nie można osiągnąć C → ∞ ponieważ w rzeczywistym świecie istnieją siły oporu, których dotąd nie uwzględniliśmy.
Drgania wymuszone z tłumieniem
Dodajmy teraz do równań siłę tarcia. Istnieje wiele sytuacji (siła lepkości w płynach, spadek napięcia na oporze U=IR), gdy siła tarcia jest proporcjonalna do szybkości.
dx
2
d x
dx
Równanie ruchu z siłą tłumiącą F = −β
jest postaci m
= − kx − β
+ F( t) ;
r
dt
2
dt
dt
Sprowadźmy to równanie do wygodniejszej postaci
11/ 1
d 2 x
dx
2
F
+
γ + ω x
0
=
dt 2
dt
m
gdzie γ = β / m . Podstawiając siłę F = F cos(ω t + ϕ ) otrzymuje się rozwiązanie w postaci 0
0
drgań o tej samej częstości co siła wymuszająca. Wychylenie ciała z położenia równowagi opisywane jest przez funkcję
x = x cos(ω t + θ + ϕ )
0
0
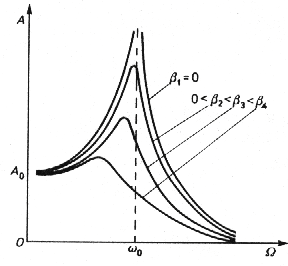
o amplitudzie
F /
0
x =
m
0
([ 2
ω − ω
+ γ ω
0
)2
2
2
]122
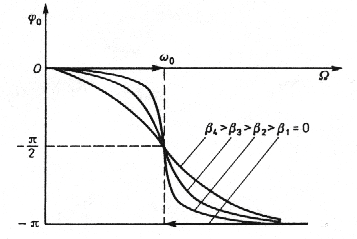
i przesunięciu fazowym θ danym równaniem
γω
tgθ = −
2
2
ω − ω
0
Kąt θ ma wartość ujemną dla wszystkich ω, co odpowiada wychyleniu x opóźnionemu w fazie w stosunku do siły F .
θ
dla β = 0 amplituda x0 = C a różnica faz , θ, jest równa 0 lub −π
ENERGIA
Sumę energii kinetycznej i potencjalnej oscylatora nazwa się energią zmagazynowaną. Jej wartość średnia w stanie ustalonym, kiedy amplituda się nie zmienia, jest stała.
< E
ω
m >= 1 m <
1
2
v > +
2
m
x
0 <
2 >
2
2
1
2
2
x = x cosω t
,
< x >=
x
0
0
2
podstawiając
1
2
2
2
v = − x ω sin ω t
,
< v >=
x ω
0
0
2
11/ 2
Otrzymujemy
1
< E >= m ω + ω ⋅
m
( 2 2 x
0 )
2
0
4
Na początku, po włączeniu siły F zachodzi gromadzenie energii i związany z tym wzrost amplitudy drgań a następnie w stanie ustalonym układ pobiera energię tylko na pokrycie występujących strat cieplnych. Siła wykonuje dużą pracę wprowadzając oscylator w ruch.
Aby go utrzymać w ruchu musi jedynie pokonywać tarcie. Jeżeli tarcie jest małe oscylator może uzyskiwać bardzo duże energie.
Otrzymane rozwiązanie x = x cos(ω t + θ + ϕ ) 0
0
opisuje drgania w stanie ustalonym.
DRGANIA TŁUMIONE
Po wyłączeniu siły wymuszającej straty energii, które do tej pory były uzupełniane przez pracę wykonywaną przez siłę wymuszającą F spowodują malenie energii zmagazynowanej.
Równanie będzie teraz :
2
x
+ γ x + ω
x = 0
0
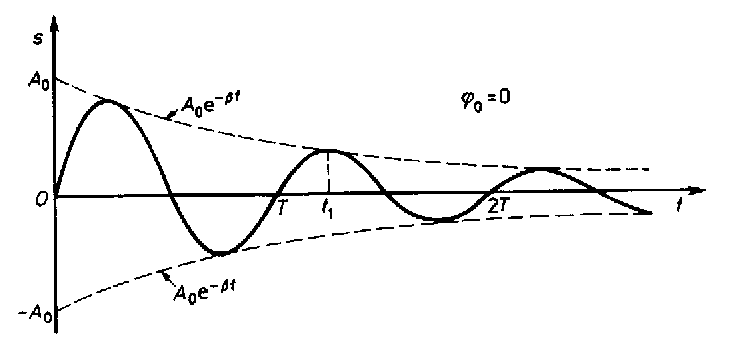
• W przypadku, gdy ω0 > γ/2
rozwiązanie jest postaci
γ t / 2
x =
−
A e
cos( ω γ t + ϕ )
0
0
i opisuje oscylacje o częstości
1
2
2
ωγ = ω − γ ,
0
4
malejącej z czasem amplitudzie
−γ t / 2
A( t ) = A e
o
i przesunięciu fazowym ϕ0.
Wartości A0 i ϕ0 można wyznaczyć z wartości początkowych wychylenia z położenia równowagi x0 = x(0) oraz prędkości v0 = v(0) Wielkość
A t
δ
( )
= ln
= 1
( / )
2 T
γ
A t
( + T)
nazywamy logartymicznym
dekrementem tłumienia.
drgania tłumione
11/ 3
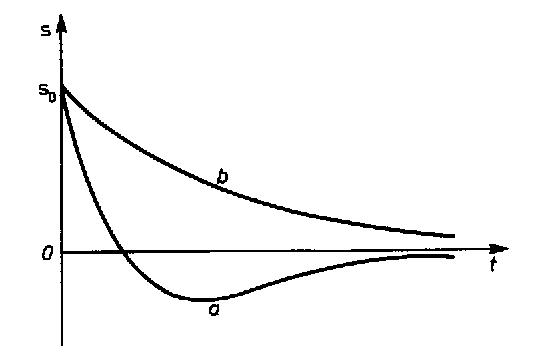
• W przypadku gdy ω0 < γ/2
rozwiązanie jest sumą dwóch funkcji wykładniczych
− a t
− a t
x = A e 1 + A e
2
1
2
gdzie
1
1
2
2
α = − γ −
γ − ω
1
0
2
4
oraz
1
1
2
2
α = − γ +
γ − ω
2
0
2
4
Ruch ciała w tym przypadku nie jest okresowy, mówimy, że jest to ruch aperiodyczny Rozwiązanie typu (a)
występuje gdy v0 jest
przeciwnie skierowane
do x0
oraz v > α x
0
1
0
11/ 4
Wyszukiwarka
Podobne podstrony:
MF13 drgania wymuszone
5 drgania wymuszone, Politechnika Łódzka, Do Wojciechowskiego
MF10 drgania wymuszone
Wykład 14 Drgania wymuszone oscylatora harmonicznego ppt
F13 drgania wymuszone
MF10 drgania wymuszone
DRGANIA WYMUSZONE1a
drgania wymuszone nietlumione prezentacja new
drgania wymuszone, TRANSPORT PWR, STUDIA, SEMESTR II, FIZYKA, fizyka-wyklad, zagadnienia opracowane,
Drgania wymuszone z tłumieniem układu o jednym stopniu swobody, wip, Drgania
10 Rezonans w obwodzie szeregowym RLC Elektromagnetyczne drgania wymuszone w obwodzie RLC
Losowe drgania wymuszone fundamentu skrzyniowego
Drgania wymuszone układów o 1 st swobody
F13 drgania wymuszone
Drgania wymuszone oscylatora tłumionego
Drgania wymuszone nietłumione układu o jednym stswobody, wip, Drgania
fiztomi10, MIBM WIP PW, fizyka 2, laborki fiza(2), 10-Rezonans w obwodzie szeregowym RLC. Elektromag
drgania wymuszone, mechanika 1
więcej podobnych podstron