**. Pomiar gęstości prawdopodobieństwa f (hipoteza ergodycznośći) x ( x )
x1
t
X2
t
.........................................................
Xn
t
t
∀ ∈( ,
0 ∞)
t
x
m
= m
x
x
Stacjonarny proces jest procesem ergodycznym jeżeli średnia policzona po zbiorze realizacji jest taka sama dla wszystkich czasów rzeczywistych i dodatkowo jest równa średniej liczonej po czasie dla wszystkich realizacji. Dla ergodycznych procesów stochastycznych, gęstość prawdopodobieństwa i dystrybuantę prawdopodobieństwa można łatwo obliczyć według następujących schematów.
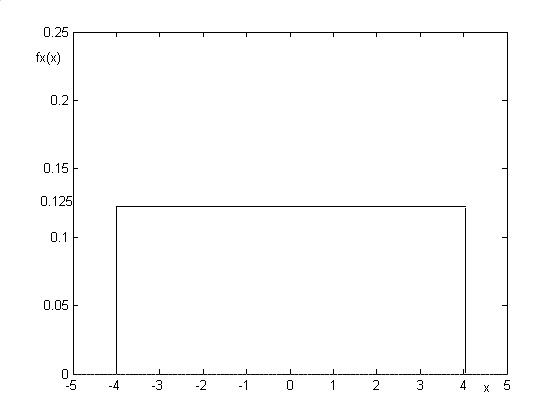
Obliczenie gęstości prawdopodobieństwa: f
x ( x )
X(t)
X+ X
∆
X
T
t
∆t
∆
1
∆t2
∆t3
∆t4 t5
∆t6
k
∑ ∆ t i
lim 1
T →∞
f
= lim
, =
x ( x )
T
T ∆ x ?
∆ x→0
∆ x
Czas obserwacji procesu (horyzont czasowy pomiaru) powinien być wystarczająco długi.
Oznacza to przy używaniu powyższego wzoru dla danego x , zakończenie obliczeń gdy wydłużanie czasu obserwacji nie powoduje zmian f
.
x ( x )
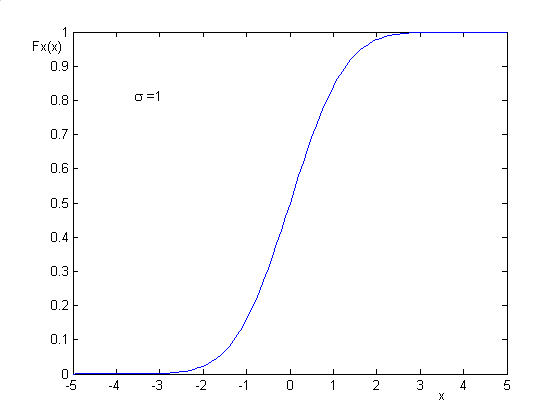
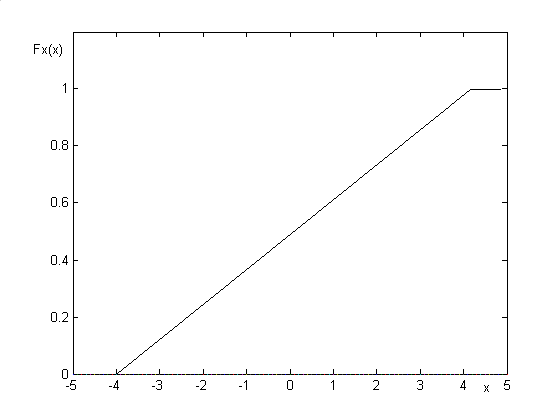
Obliczenie dystrybuanty: F
x ( x )
X(t)
X
∆τ
t
1
∆τ
∆τ
2
3
k
∑ ∆ τ i
F
=
1
lim
x ( x )
T →∞
T
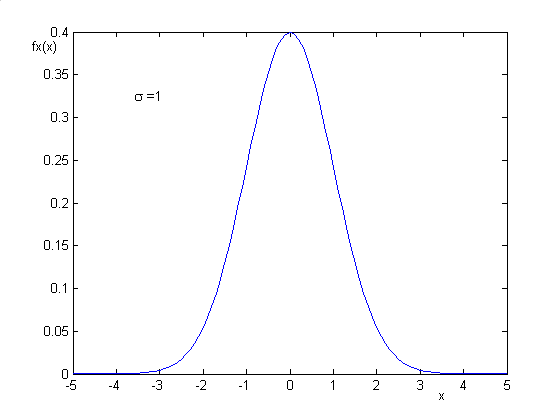
rozkład gaussowski:
( x− mx )
−
f x =
e
σ
x (
)
2
1
2 x
2π σ x
rozkład dwumianowy
rozkład jednorodny (równomierny)
**. Pomiar gęstości widmowej Φ
xx ( jω )
Bezpośrednie wyliczenie gęstości widmowej własnej lub wzajemnej jest trudne. Łatwiej Jest najpierw wyliczyć odpowiednie funkcje korelacji a następnie obliczyć ich transformaty Fouriera.
Obliczenie funkcji korelacji w oparciu o dane pomiarowe: T
N−K
1
1
R τ =
∫
⋅
+τ ≅
∑
⋅
+
= R
xx ( )
x( t) x( t
) d t
x( n∆) x( n∆ k∆) xx ( k∆)
T
N +1− K n=0
0
k =
,
1
,
0
,
2 .... k
max
R
R
xx (τ ) =
xx (− τ )
R
R
xy (τ ) ≠
xx (− τ )
X(t)
∆t
t
warunki poprawnych obliczeń dla sygnałów ciągłych: T =
? τ
=
?
R
xx τ
=
max
( l im ( ) 0 )
τ →∞
Horyzont czasowy powinien być tak długi aby wydłużanie czasu obliczeń nie powodowało zmian wartości otrzymywanych funkcji korelacji. Maksymalna wartość przesunięcia czasowego, powinna być tak duża aby obejmowała czas w którym występuje funkcja korelacji.
warunki poprawnych obliczeń dla sygnałów próbkowanych z krokiem próbkowania
∆ t :
N =
? k
=
?
∆ t =
?
max
π
2
τmax
π
2
ω g
τ
max ≥ T
=
⇒
k
ω
max =
∆ t ≤ T
=
I
ω
=1+
d
ω
∆ t
g
ω
ω
d
g
d
Obliczenie na podstawie R
,
R
funkcji Φ
,
-metoda trapezów
xx (ω ) Φ xy ( jω ) xx (τ )
xy (τ )
+∞
+∞
+∞
Φ
= ∫
−
= ∫
c
os
− ∫
s
in
xy ( jω )
Rxy (τ )
ω
j τ
e
dτ
Rxy (τ )
(ω τ ) dτ j Rxy(τ ) (ω τ ) dτ
−∞
−∞
−∞
wprowadzamy funkcje T : i
Ti
Ki
t
ti- i
∆
ti
ti+∆i
K 0
τ t
i
< ≤ i − ∆
i
K
K
t
T τ
p τ
τ
t
τ t
i ( )
= ( )
= − i
i
+ i 1+ i i − ∆ i < < i + ∆
i
2∆
2
i
∆ i
0 τ ≥ ti + ∆
i
R τ
T τ
xy ( )
n
≅ ∑ i( )
i=1
+∞
+∞
n
+∞
n
n
+∞
n
+∞
Φ
jω
R e ωτ dτ
T c
os ω τ dτ
j
T s
in ω τ dτ
T cos ω τ dτ j T sin ω τ dτ
xy (
)
= ∫
− j
xy
≅ ∫∑ i
( ) − ∫∑ i ( ) = ∑ ∫ i ( ) −
∑ ∫ i ( )
−∞
−∞ i=1
−∞ i=1
i=1 −∞
i=1 −∞
ti −∆
t
i
i + ∆
t
i
i −∆
t
i
i + ∆ i
Φ
jω
K cos ω τ dτ
p t cos ω τ dτ j K sin ω τ dτ
p t sin ω τ dτ
xy (
) n
n
≅ ∑
i
+
∫
( )
∫ i( ) ( ) − ∑
i
+
∫
( )
∫ i( ) ( )
i=1 0
t
1
0
i −∆
i=
i
ti −∆ i
ω
ω
Re(
sin t
sin
Φ
jω
K t
xy (
) n
( i ) (∆ i )
≅ ∑
i i
ω
ω
1
t
i=
i
∆ i
ω
ω
Im(
K
cos t
cos
Φ
jω
sign t
( )
K t
xy (
)
n
i
( i ) (∆ i )
≅ −∑
i
−
+ i i
ω
ω
ω
1
t
i=
i
∆ i
Wyszukiwarka
Podobne podstrony:
Identyfikacja Procesów Technologicznych, 08 Pomiar gestosci prawdopodobienstwa
Identyfikacja Procesów Technologicznych, 02 Eksperyment czynny
Identyfikacja Procesów Technologicznych, 07 Identyfikacja stochastyczna
Identyfikacja Procesów Technologicznych, Identyfikacja charakterystyki statycznej obiektu dynamiczne
Identyfikacja Procesów Technologicznych, Identyfikacja charakterystyk statycznych obiektu dynamiczne
Identyfikacja Procesów Technologicznych, Identyfikacja parametrycznarekurencyjną metodą najmniejszyc
Identyfikacja Procesów Technologicznych, 06 Metoda Momentów pelna
Identyfikacja Procesów Technologicznych 10.FFT
Identyfikacja Procesów Technologicznych 03.Obiekt oscylacyjny
Identyfikacja Procesów Technologicznych 05.Metoda momentów
Identyfikacja Procesów Technologicznych 09.Metodya korelacji
Identyfikacja Procesów Technologicznych, 05 Metoda momentów
Identyfikacja Procesów Technologicznych, Identyfikacja parametryczna obiektu dynamicznego (cz.1 i 2)
Identyfikacja Procesów Technologicznych, Identyfikacja parametryczna obiektów dynamicznych, Nr ?wicz
Identyfikacja Procesów Technologicznych, 12 Generatory przebiegów przypadkowych c d
Identyfikacja Procesów Technologicznych, 11 Generatory przebiegów przypadkowych
Identyfikacja Procesów Technologicznych, Realizacja liniowych modeli dyskretnych z wykorzystaniem si
Identyfikacja Procesów Technologicznych 06.Metoda Momentów pelna
Identyfikacja Procesów Technologicznych 07.Identyfikacja stochastyczna
więcej podobnych podstron