2. OPIS RUCHU (2 strony)
Zjawiskiem fizycznym obserwowanym najczęściej w otaczającym nas świecie jest ruch.
Stykamy się z nim wszędzie: ruch zwierząt, pojazdów, planet, cząsteczek gazów. Opis przestrzenno – czasowych właściwości ruchu bez wnikania w przyczyny wywołujące ten ruch podaje kinematyka. Mówimy, że ciało jest w ruchu jeżeli jego położenie względem jakiegoś innego ciała zmienia się. To „inne” ciało lub układ ciał nazywamy układem odniesienia.
Wybór układu odniesienia jest warunkiem koniecznym opisu ruchu lub spoczynku ciała.
Opisujemy ruch pociągu względem powierzchni ziemi, ziemi względem słońca itd. Z
układem odniesienia najczęściej wiążemy jakiś układ współrzędnych.
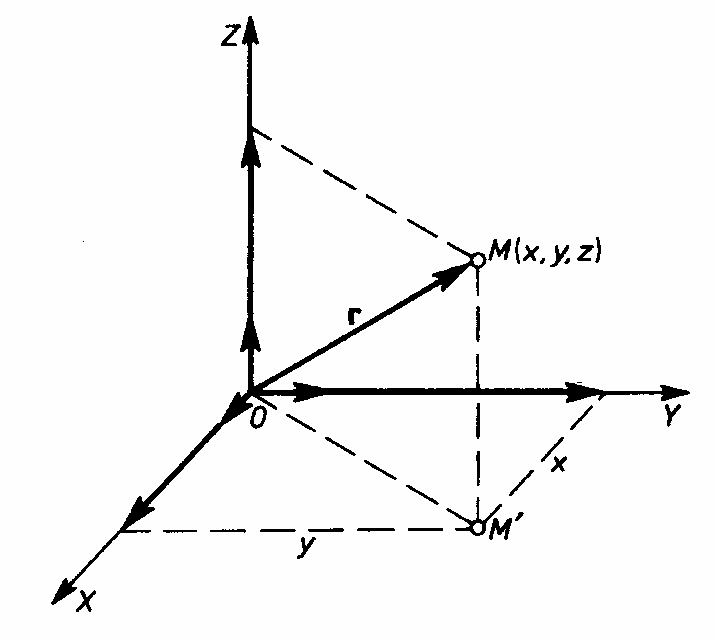
Położenie
wektor położenia , promień wodzący
r = x ⋅ xˆ + y ⋅ yˆ + z ⋅ zˆ
Jeżeli badany punkt się porusza to wektor
wodzący zależy od czasu.
r = r( t)
x = x(t), y = y(t), z = z(t)
Równanie ruchu
r( t) = (
x t)⋅ xˆ + y( t)⋅ yˆ + z( t)⋅ zˆ
Eliminując z tych równań czas otrzymujemy równanie toru, po którym porusza się punkt z = F (x,y)
Prędkość średnia
z
P 1
r1
r
∆
r
P
2
2
r 2
1
− r
r
∆
v
=
=
ś r
y
t
t
2 −
t
1
∆
x prędkość średnia punktu w czasie ∆t = t2 – t1
v
∆ r
ś r
1

Prędkość
Jeżeli będziemy skracali rozważane odstępy czasu ∆t → 0 to otrzymamy średnią prędkość w bardzo krótkim odstępie czasu, czyli prędkość chwilową lub po prostu prędkość.
f
∆
df
r
∆
v = lim
zgodnie z definicją pochodnej funkcji ( lim
=
)
t
∆ →0
t
∆
x
∆ →0
x
∆
dx
dr
r
d
v =
v
dt
dx
dy
dz
v =
⋅ xˆ +
⋅ yˆ +
⋅ zˆ
dt
dt
dt
r
1+
1
r
r
d
Prędkość jest zawsze styczna do toru
Przyspieszenie
∆ v
przyspieszenie średnie a
=
ś r
t
∆
v
∆
przyspieszenie chwilowe lub po prostu przyspieszenie a = lim t
∆ →0
t
∆
2
dv
d r
a =
a =
dt
2
dt
Przyspieszenie ma dwie składowe:
przyspieszenie styczne do toru,
opisujące zmiany wartości prędkości
dv
a =
s
dt
gdzie v oznacza warto
ść prędkości a
v
s
przyspieszenie normalne, prostopadłe do toru
opisujące zmiany kierunku prędkości,
2
v
a =
n
ρ
gdzie ρ jest promieniem krzywizny toru. a ⊥ v n
W układzie współrzędnych kartezjańskich:
dv
dv
dv y
dv
a
x
=
=
⋅ xˆ +
⋅ y
z
ˆ +
⋅ zˆ
dt
dt
dt
dt
d 2 x
d 2 y
d 2 z
a =
⋅ xˆ +
⋅ yˆ +
⋅ zˆ
dt 2
dt 2
dt 2
2
Wyszukiwarka
Podobne podstrony:
FM2 opis ruchu
FM2 opis ruchu(1)
FM2 opis ruchu
19 Pojecie i opis ruchu falowego (2)
Fizyka 1 3 opis ruchu pochodne
FW2a opis ruchu 07
Opis ruchu
Fizyka 1 3 opis ruchu pochodne
05 Opis ruchu & Rownanie energi Nieznany (2)
Pełny klasyczny i kwantowy opis ruchu w wirującej pułapce harmonicznej
02 - Opis ruchu, Politechnika Lubelska, Studia, Studia, FIZA
wyklad04, kinematyka, opis ruchu
Wykl Mechanika Budowli 15 Opis Ruchu Drgania Wlasne Tlumione
f1 opis ruchu fo RBU4AC5YJVXTPTII7P6QAO633K7EHOVWYYLNBAQ
Fizyka opis ruchu całki
Kinematyka opis ruchu
więcej podobnych podstron