skrypt wzory i prawa z objasnieniami38
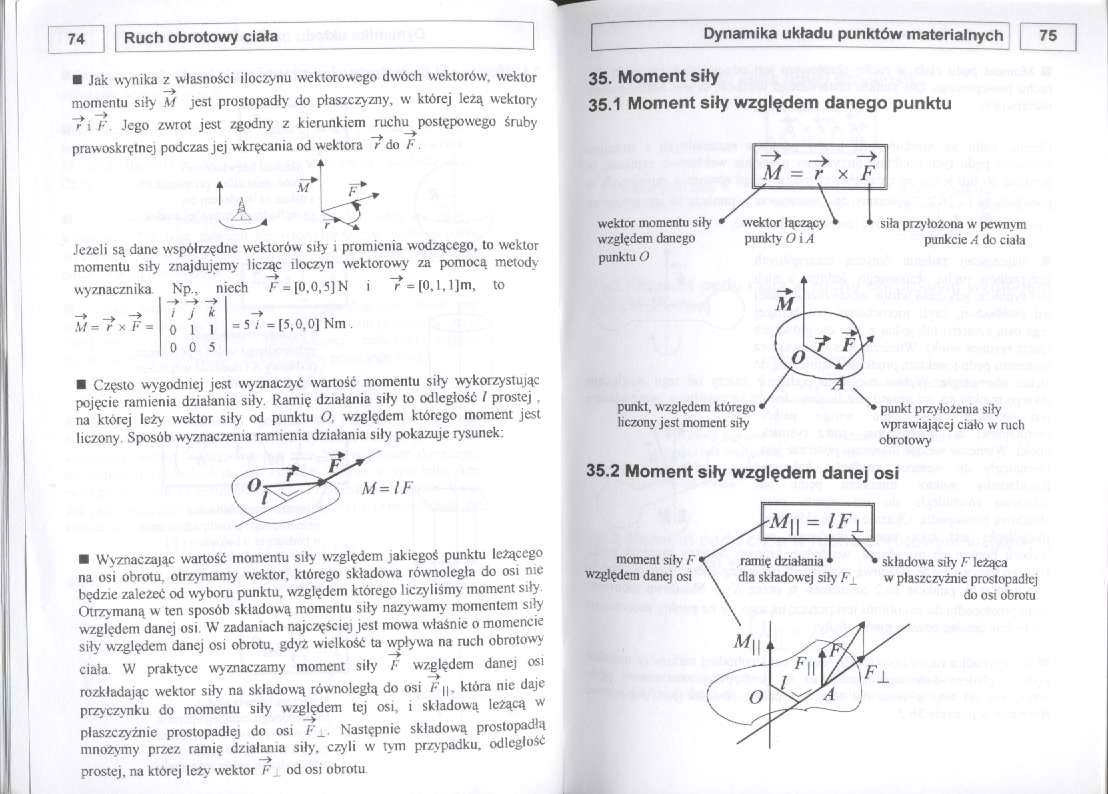
■ Jak wynika z własności iloczynu wektorowego dwóch wektorów, wektor —)
momentu siły M jest prostopadły do płaszczyzny, w której lezą wektory _^ —>
r i F Jego zwrot jest zgodny z kierunkiem ruchu postępowego śruby prawoskrętnej podczas jej wkręcania od wektora ~r do F
Jeżeli są dane współrzędne wektorów siły i promienia wodzącego, to wektor momentu siły znajdujemy licząc iloczyn wektorowy za pomocą metody —► —>
wyznacznika Np., niech F = (0.0,5]N i r=[0, l.ljm, to
_>
M=rxF=
= 5 / = [5,0,0] Nm
■ Często wygodniej jest wyznaczyć wartość momentu siły wykorzystując pojęcie ramienia działania siły. Ramię działania siły to odległość / prostej na której leży wektor siły od punktu O. względem którego moment jest liczony Sposób wyznaczenia ramienia działania siły pokazuje rysunek:

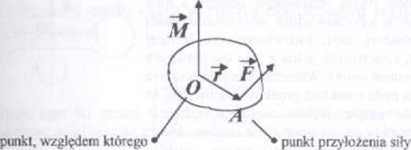
■ Wyznaczając wartość momentu siły względem jakiegoś punktu leżącego na osi obrotu, otrzymamy wektor, którego składowa równoległa do osi nie będzie zalezeć od wyboru punktu, względem którego liczyliśmy moment siły Otrzymaną w ten sposób składową momentu siły nazywamy momentem siły względem danej osi W zadaniach najczęściej jest mowa właśnie o momencie siły względem danej osi obrotu, gdyż wielkość ta wpływa na ruch obrotowy ciała. W praktyce wyznaczamy moment siły' F względem danej osi rozkładając wektor siły na składową równoległą do osi F||. która me daje przyczynku do momentu siły względem tej osi, i składową leżącą w płaszczyźnie prostopadłej do osi F±. Następnie składową prostopadłą
mnożymy przez ramię działania siły. czyli w tym przypadku, odległość —>
prostej, na której leży wektor F od osi obrotu
Dynamika układu punktów materialnych
75
35. Moment siły
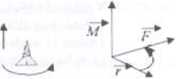
35.1 Moment siły względem danego punktu
M = r x F
wektor momentu siły względem danego punktu O
wektor łączący punkty O i A
rr
siła przyłożona w pewnym punkcie A do ciała
liczony jest moment siły wprawiającej ciało w ruch
obrotowy
35.2 Moment siły względem danej osi
Wyszukiwarka
Podobne podstrony:
skrypt wzory i prawa z objasnieniami38 74 Ruch obrotowy ciała ■ Jak wynika z własności iloczynu wekt
skrypt wzory i prawa z objasnieniami39 Ruch obrotowy ciała ■ Moment pędu ciała w ruchu obrotowym jes
skrypt wzory i prawa z objasnieniami41 80Ruch obrotowy ciała ■ Zasada zachowania m
skrypt wzory i prawa z objasnieniami40 78Ruch obrotowy ciała ■ Jeśli wyróżnimy nieruchomą oś obrotu,
skrypt wzory i prawa z objasnieniami41 80Ruch obrotowy ciała ■ Zasada zachowania m
skrypt wzory i prawa z objasnieniami30 56 Zderzenia - zasada zachowania pędu ■ W p
skrypt wzory i prawa z objasnieniami10 Rzut pionowy ■ Rzuty ciała przy powierzchni Ziemi przy założe
skrypt wzory i prawa z objasnieniami16 30Ruch ciała po równi ■ Siła występująca w
skrypt wzory i prawa z objasnieniami35 68Moment bezwładności ■ Należy pamiętać o t
skrypt wzory i prawa z objasnieniami10 18 Rzut pionowy ■ Rzuty ciała przy powierzchni Ziemi przy zał
skrypt wzory i prawa z objasnieniami03 4 Układy współrzędnych ■ Układem odniesienia nazywamy ciało,
skrypt wzory i prawa z objasnieniami05 8 Prędkość ■ Tor jest to krzywa opisywana w przestrzeni przez
skrypt wzory i prawa z objasnieniami24 46 Pole grawitacyjne ■ Pole grawitacyjne przy powierzchni Zie
skrypt wzory i prawa z objasnieniami25 Pole sił zachowawczych (potencjalnych) ■ Jeśli w każdym punkc
skrypt wzory i prawa z objasnieniami37 72Moment bezwładności ■ Moment bezwładności
więcej podobnych podstron